
Hei kaikille elektroniikan ystäville. Tässä artikkelissa kerron sinulle kuinka tehdä hakukonerobotti, joka kulkee mustalla viivalla, jonka voit piirtää haluamallasi tavalla. Olen varma, että tämä pakki on erittäin mielenkiintoinen lelu niille, jotka keräävät sen.
En vedä pitkään aikaan, siirrymme suoraan valmistukseen.
Ennen artikkelin lukemista ehdotan, että katsot videoa, jossa on yksityiskohtainen kokoonpanoprosessori tätä pakkaussarjaa varten, sekä sen suorituskyvyn tarkistuksia.
Jotta voidaan tehdä hakukonerobotti, joka kulkee mustalla viivalla tee se itse, tarvitset:
* Kit
* Juotosrauta, juote, flux
* Sivuleikkurit
* Yleismittari
* sovittaminen "kolmannen käden" juottamiseen
* Pihdit
* Phillips-ruuvimeisseli
Ensimmäinen askel.
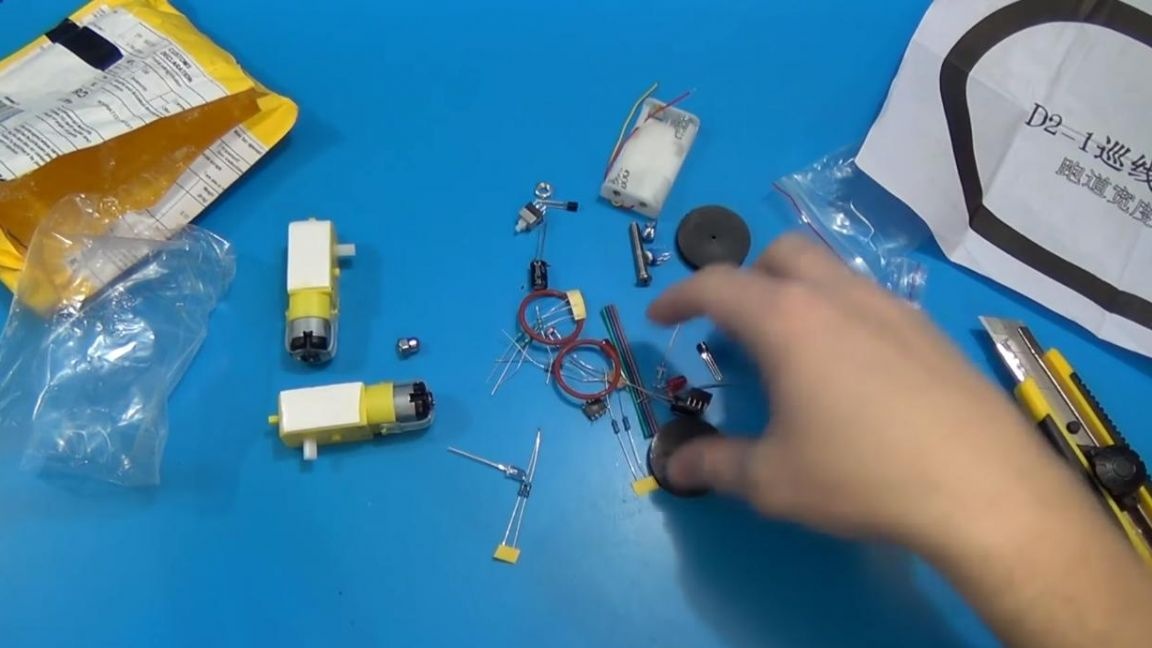
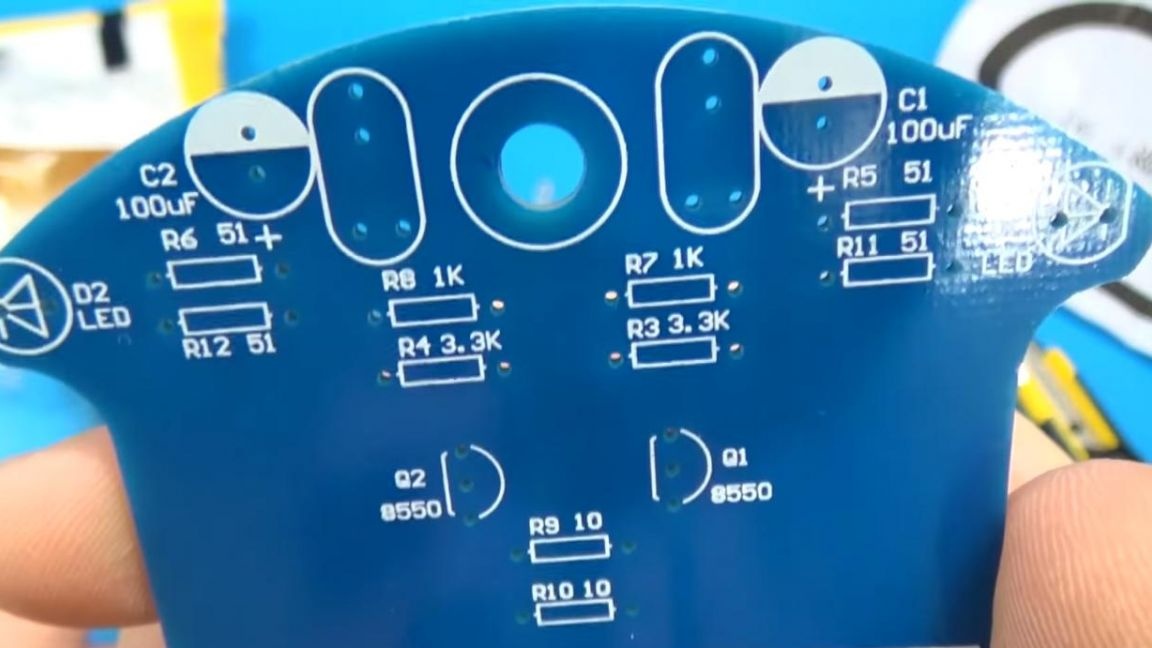
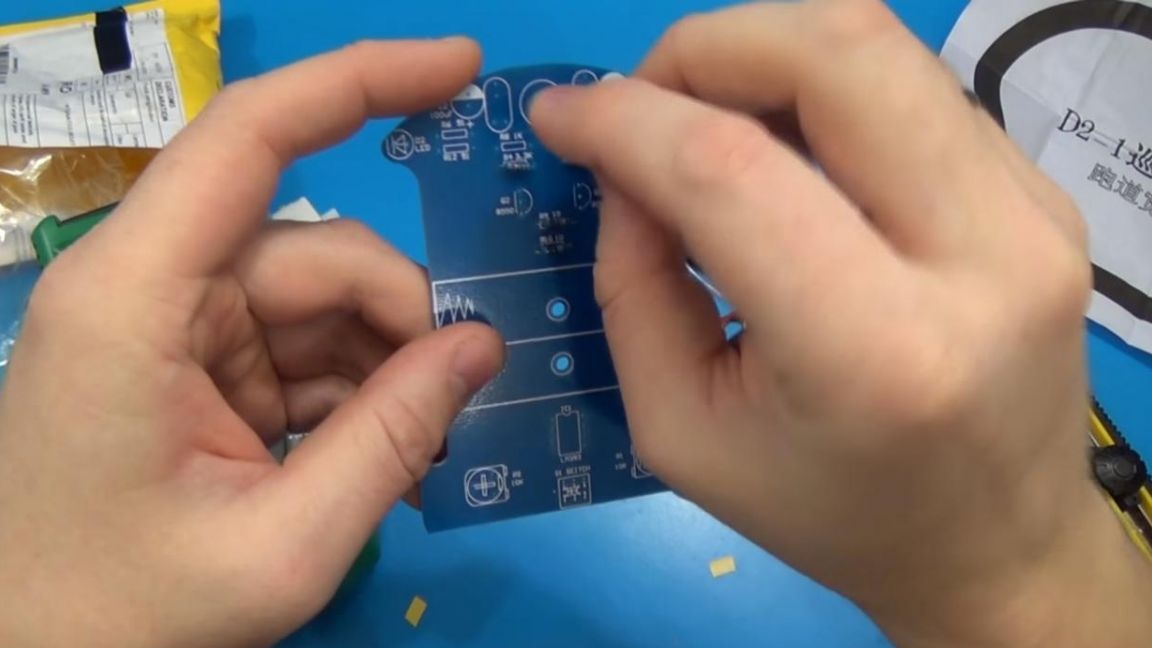
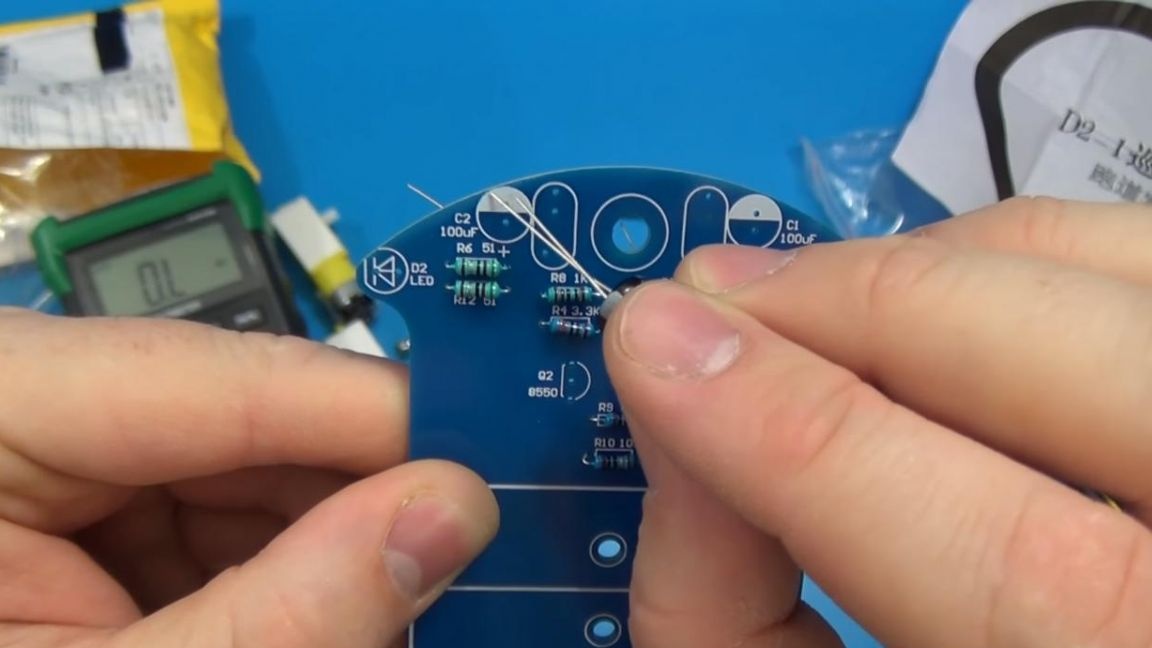
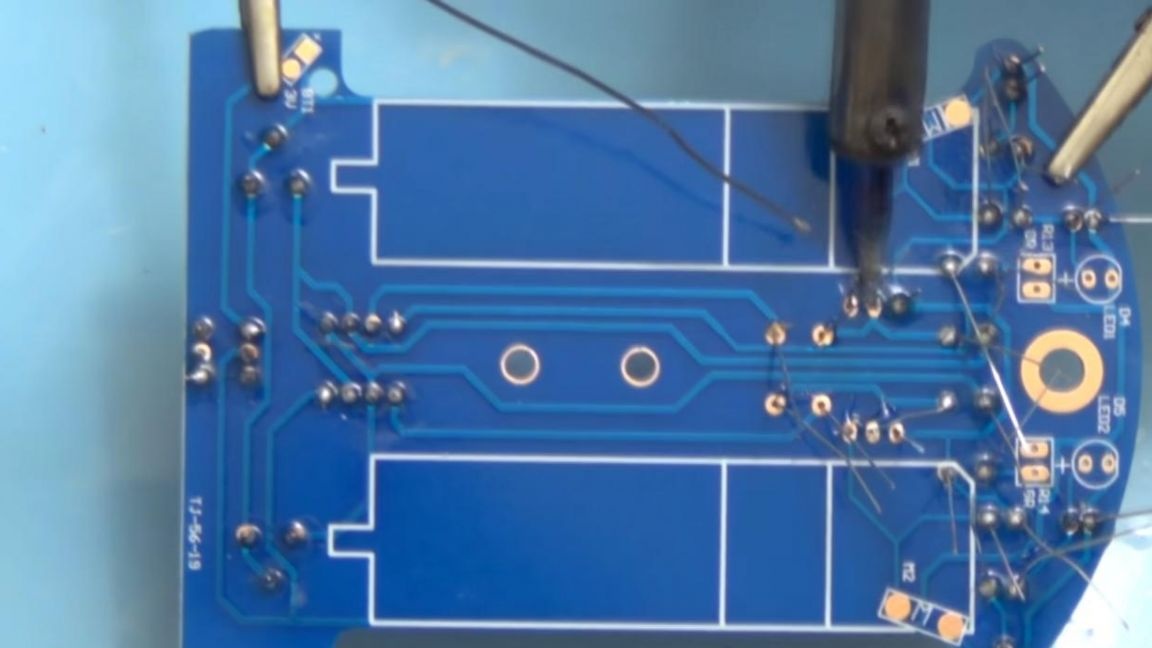
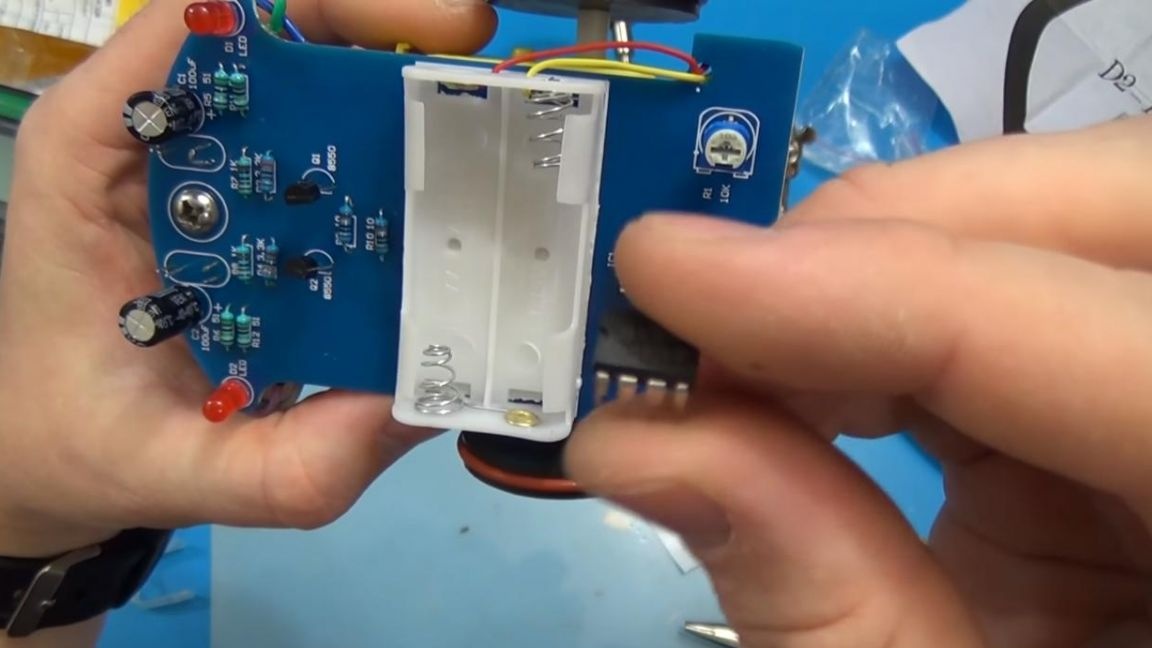
Ensinnäkin, sinun on asetettava kaikki komponentit levylle, sarja sisältää sekä vastuksia, kondensaattoreita että transistoreita.
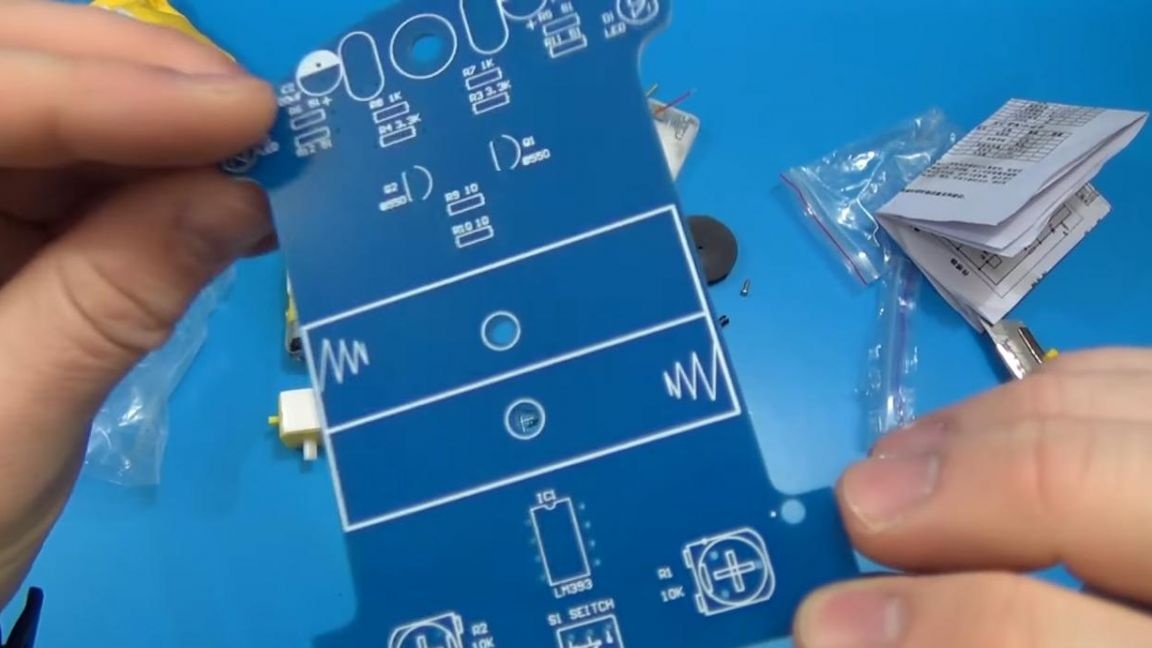
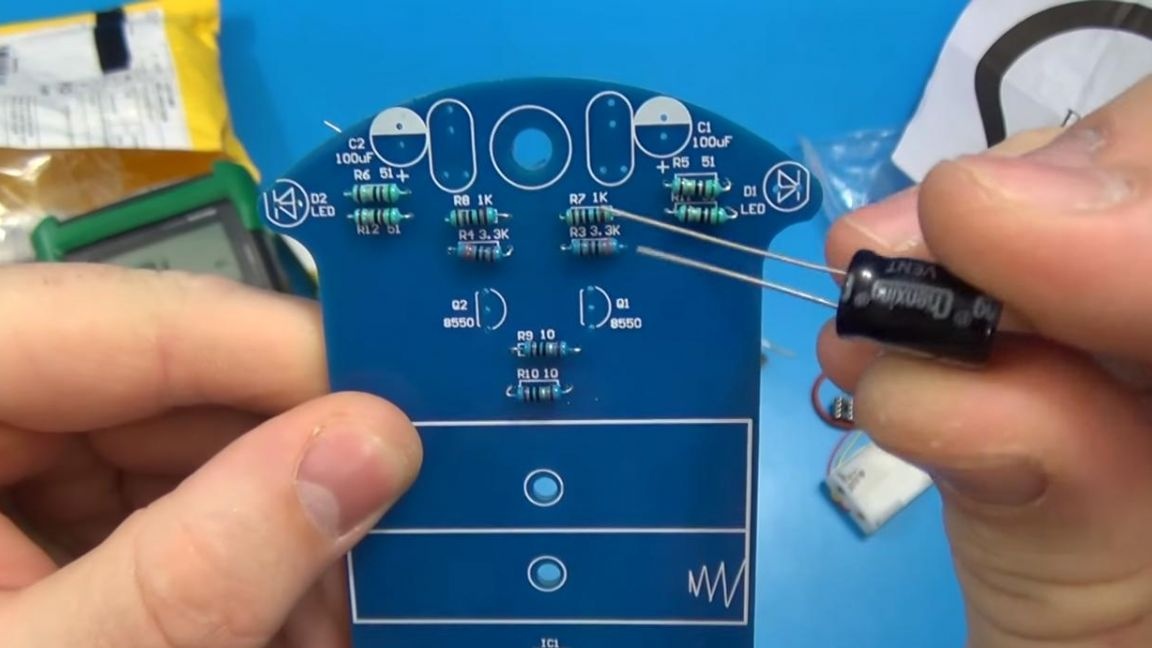
Ensin on asennettava vastukset paikoilleen, joiden nimellisarvo on ilmoitettu taululle, kun taas itse vastukset on värikoodattu, jonka avulla voit määrittää yhden vastuksen resistanssin. Lisäksi vastus voidaan mitata yleismittarilla, tämä menetelmä on nopeampi, mutta tämä ei tarkoita, että se on pakollinen. Järjestämme taululla olevat vastukset nimellisarvonsa mukaan, taivuta liittimiä hieman kääntöpuolelta, tämä tehdään niin, että ne eivät pudota juottaessaan.

Vaihe toinen
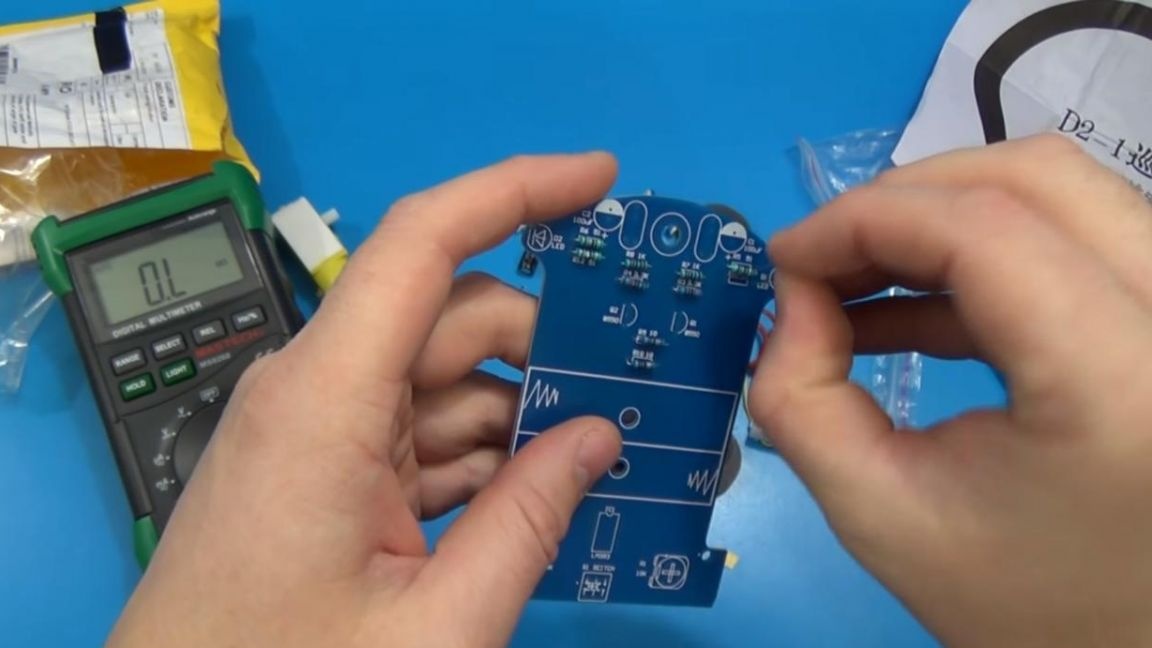
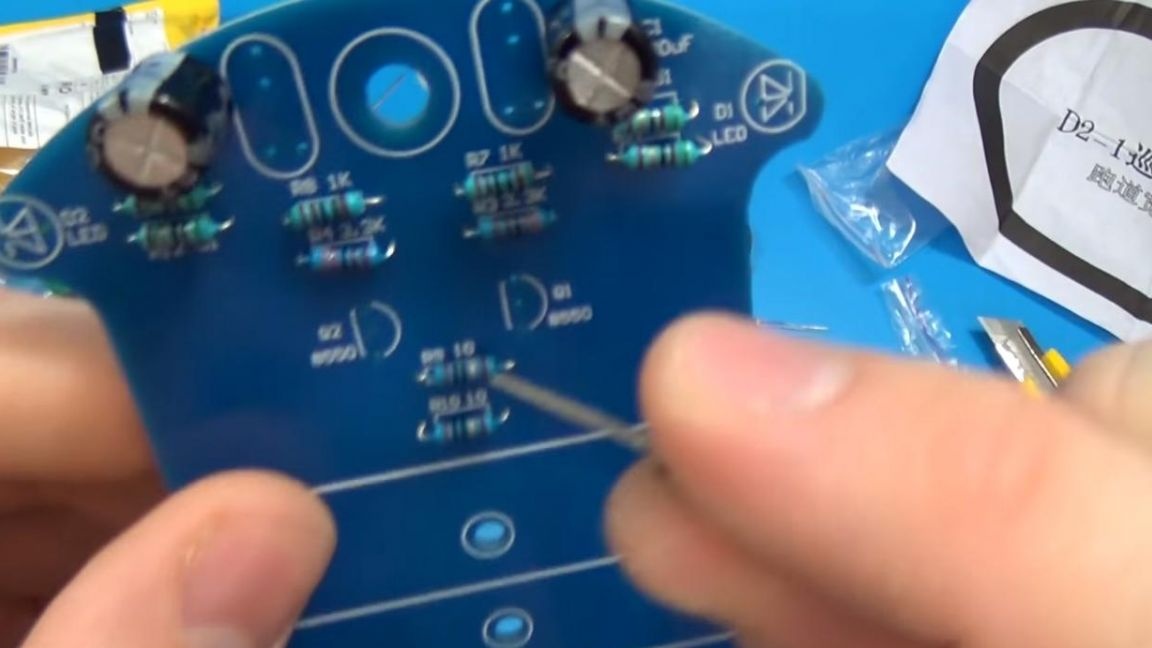
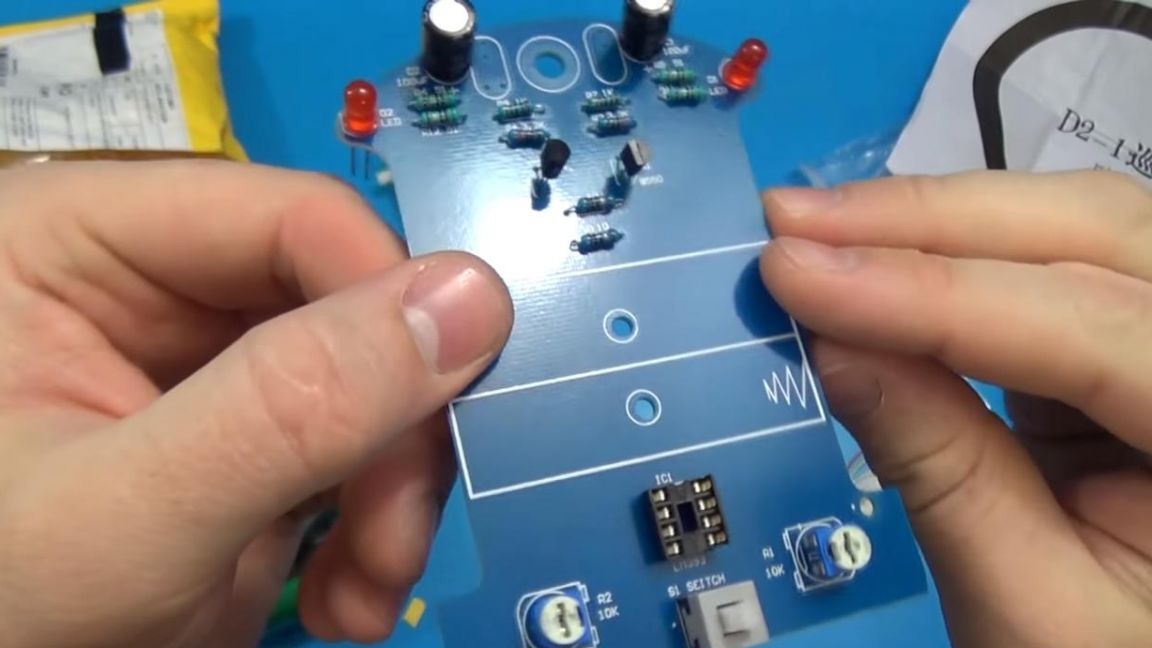
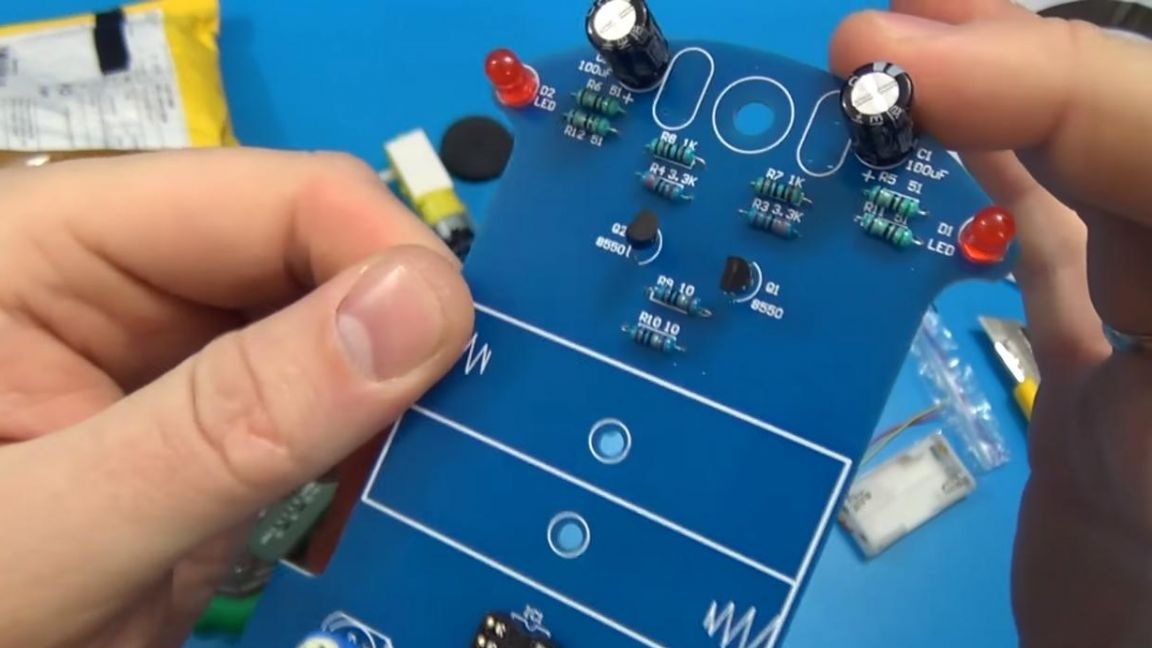
Vastukset ovat kaikki paikoillaan, joita seuraavat kondensaattorit, toisin kuin aiemmat komponentit, näillä on napaisuus. Kondensaattorin miinus merkitään kotelossaan valkoisella nauhalla, jossa on viiva; taulussa miinus on merkitty varjostetulla valkoisella puolipyörällä.
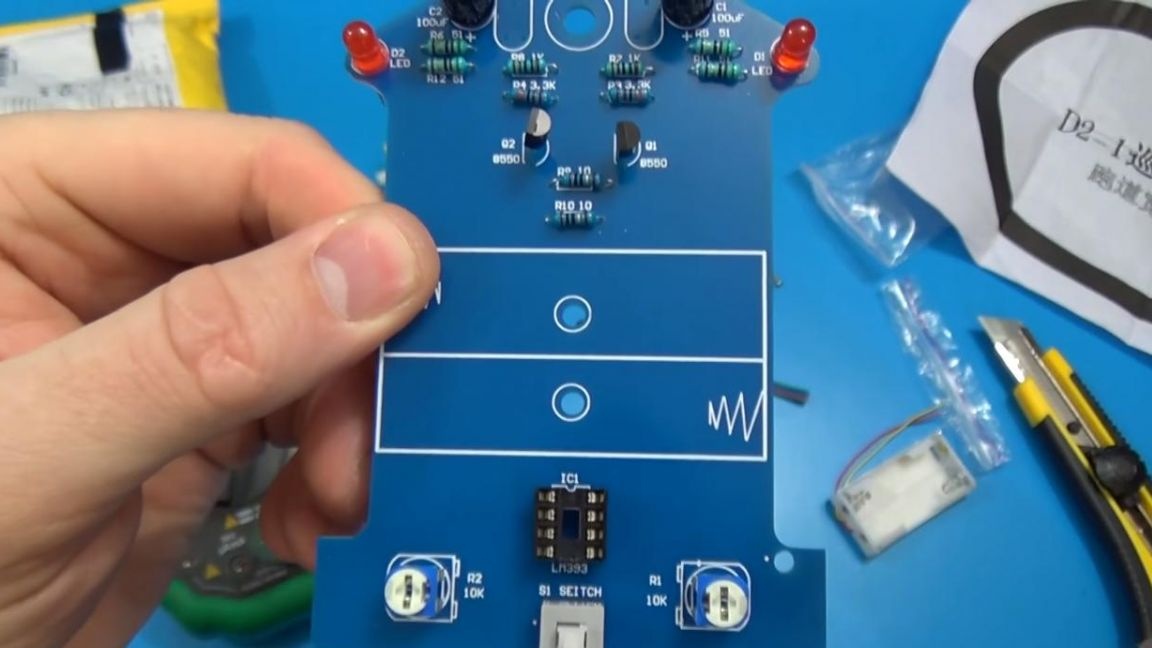
Kun kondensaattorit ovat paikoillaan, käännymme transistoreihin, ne ovat meille samat, joten emme voi sekoittaa toisiaan. Jotta ne voidaan sijoittaa oikein taululle, sinun täytyy yhdistää transistorin litteä osa viiran kanssa taululle.
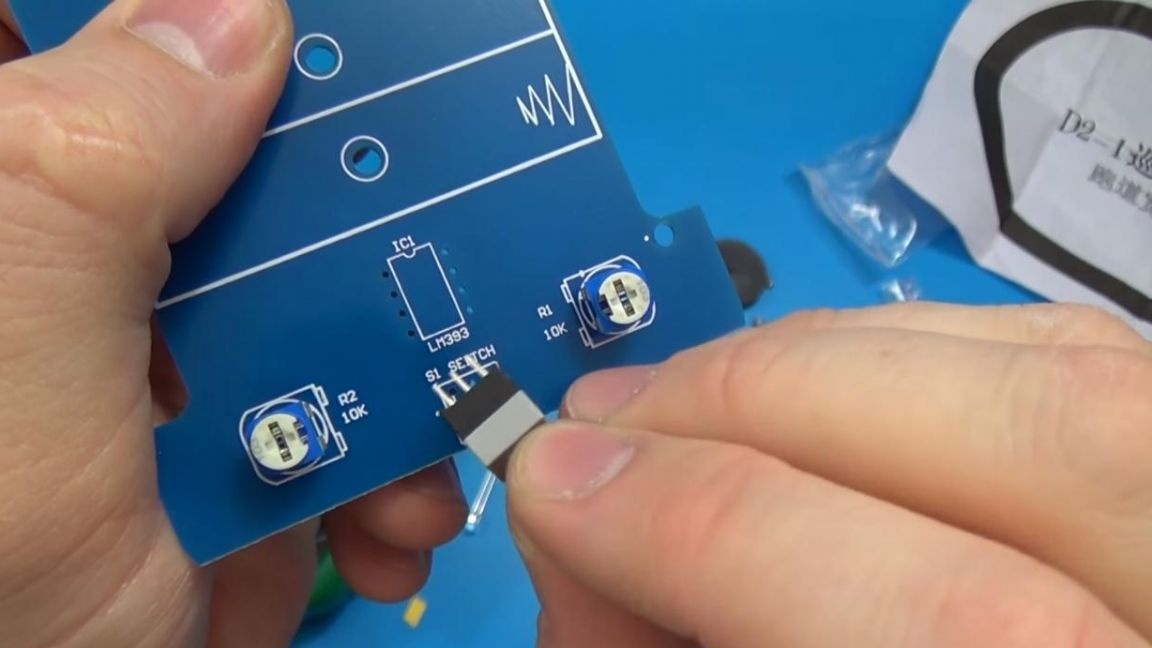
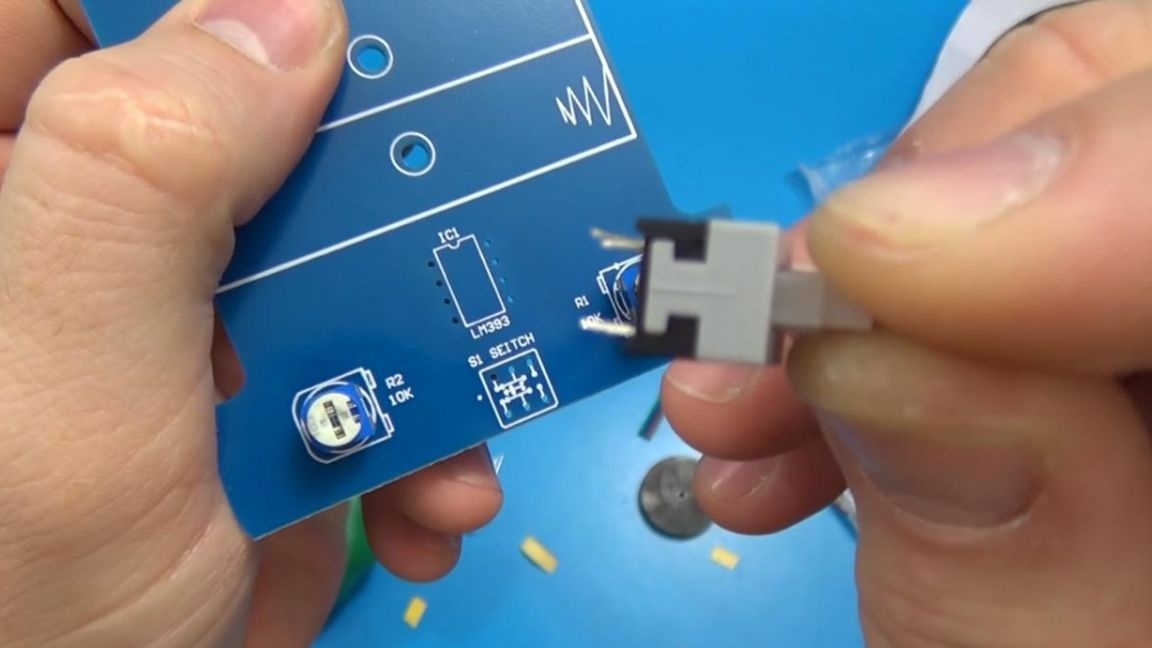
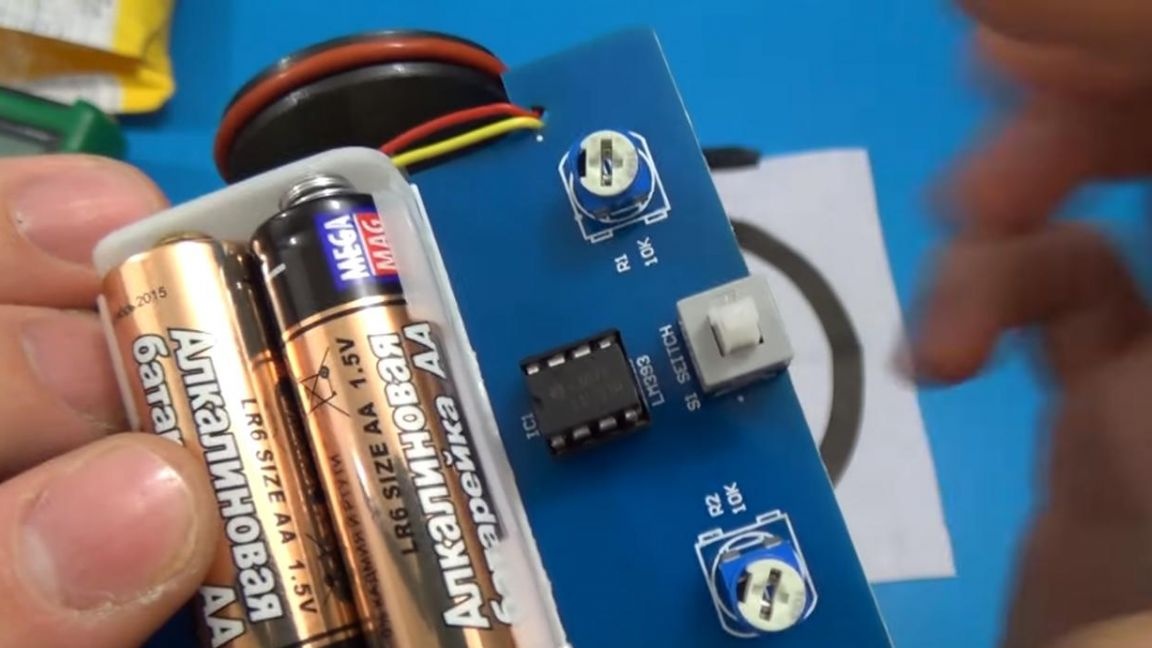
Asennamme sitten kaksi viritysvastetta, liittimien sijainnin yhteydessä ei toimi, jotta ne asetetaan väärin, mikä on hyvä. Asetamme myös virtapainikkeen, se on on-off, ts. Se voi olla päällä- tai pois-asennossa, sen oikea sijainti vastaa itse nauhan nauhan aseman ja levyn pisteen sattumaa.
Vaihe kolme
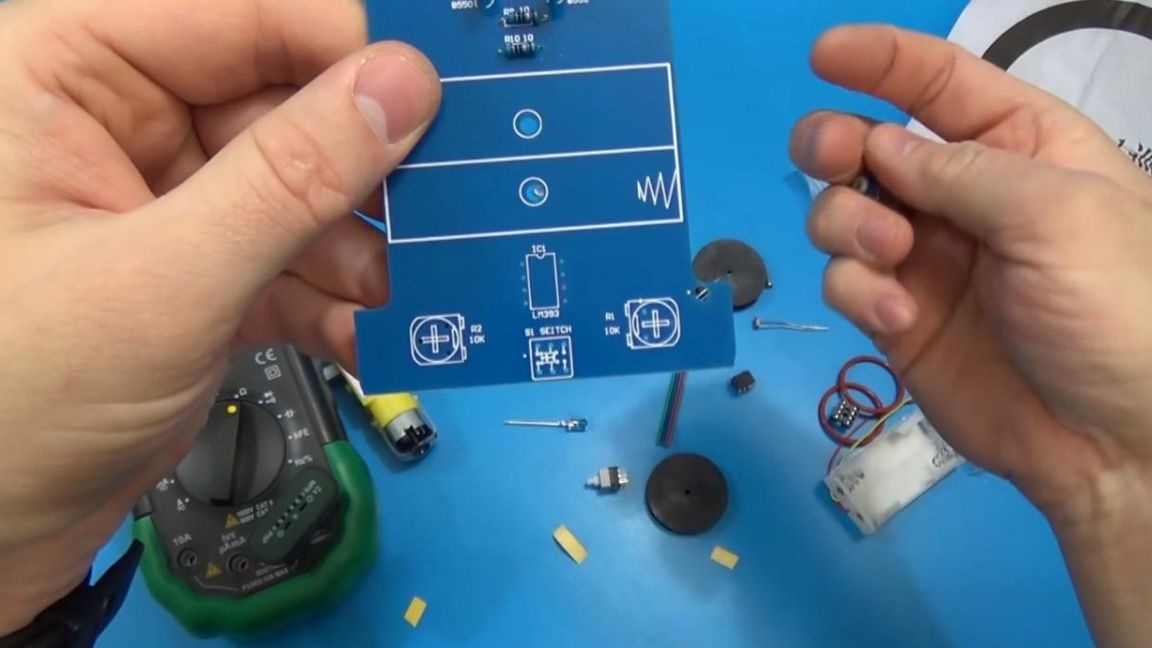
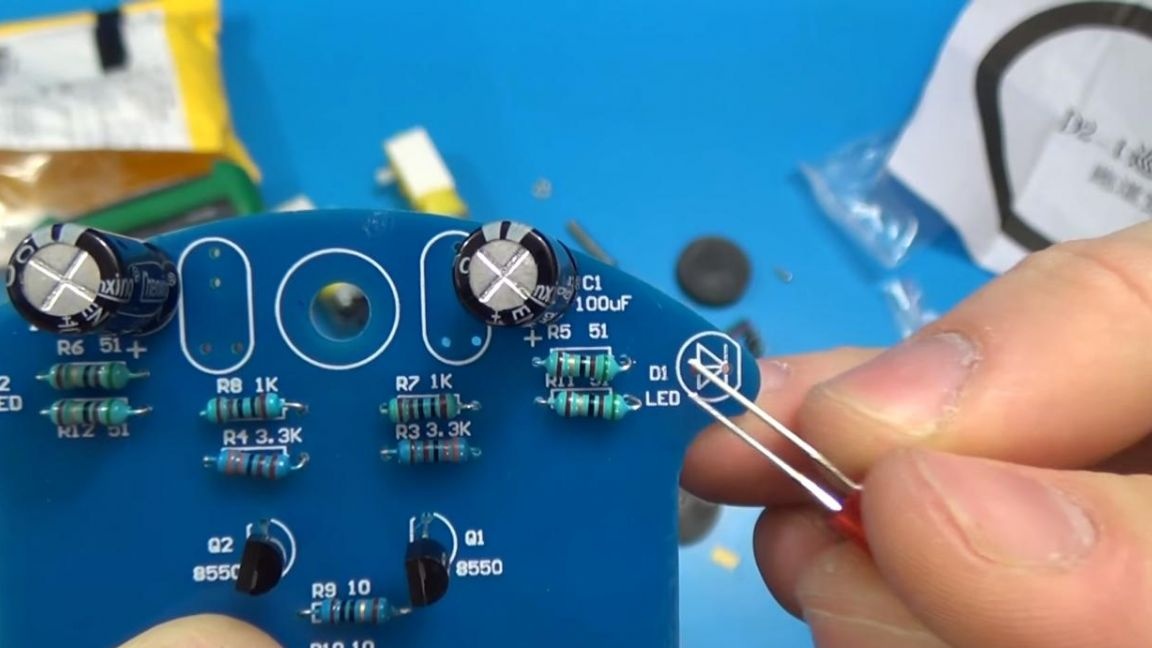
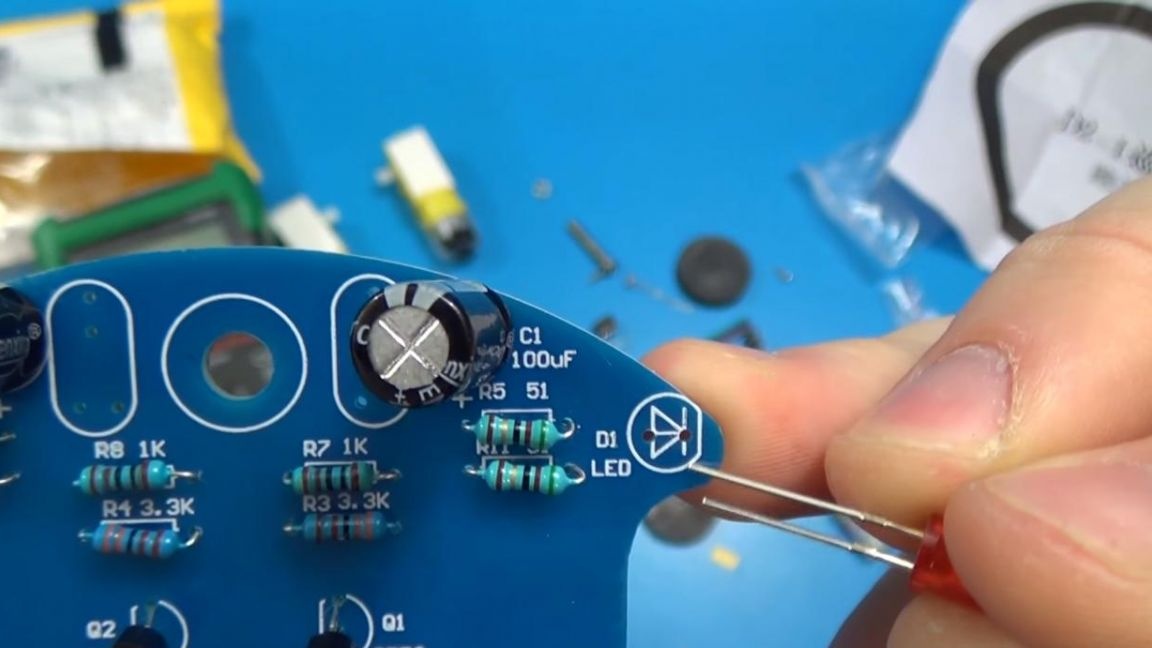
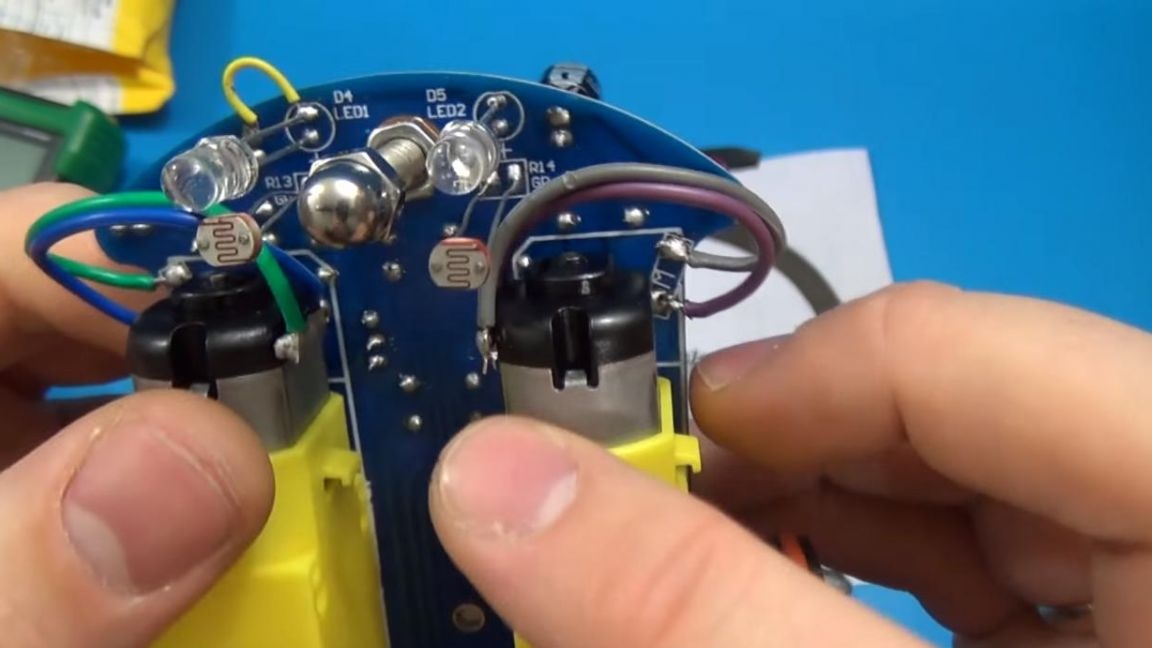
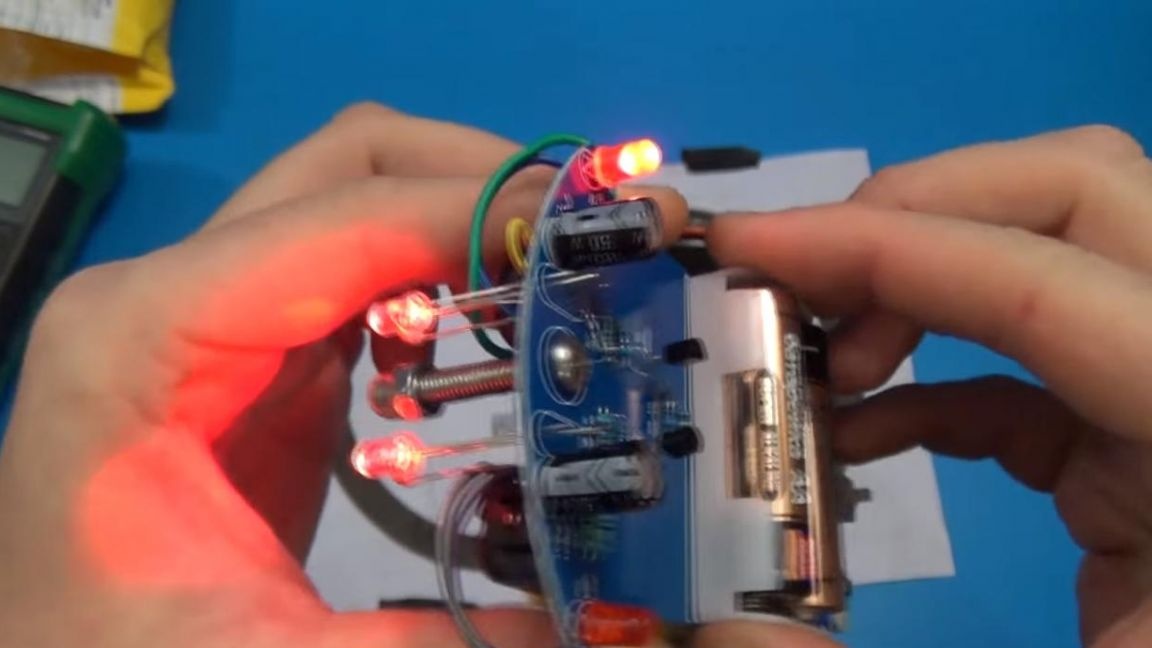
Aika käsitellä LED-valoja, niitä on pakkauksessa neljä, kaksi punaista ja kaksi valkoista. Taulussa plus on merkitty kolmiolla, LEDissä se on pitkä lähtö, miinus kaikki on selvää. Asetamme punaiset merkkivalot päälle, ne ovat "suuntavalojen" analogeja.Mikropiirille on erillinen paikka, asetamme liitännän siihen, joten sen vaihtaminen on paljon helpompaa, mutta koskettimet eivät ylikuumene juottaessaan.

Vaihe neljä
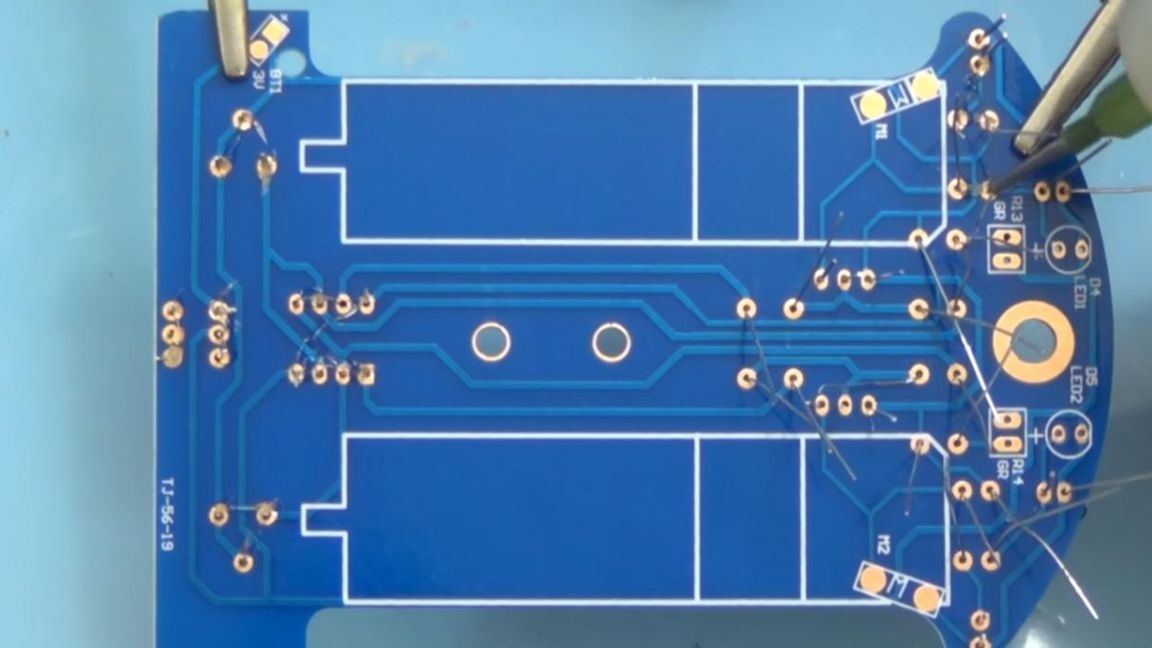
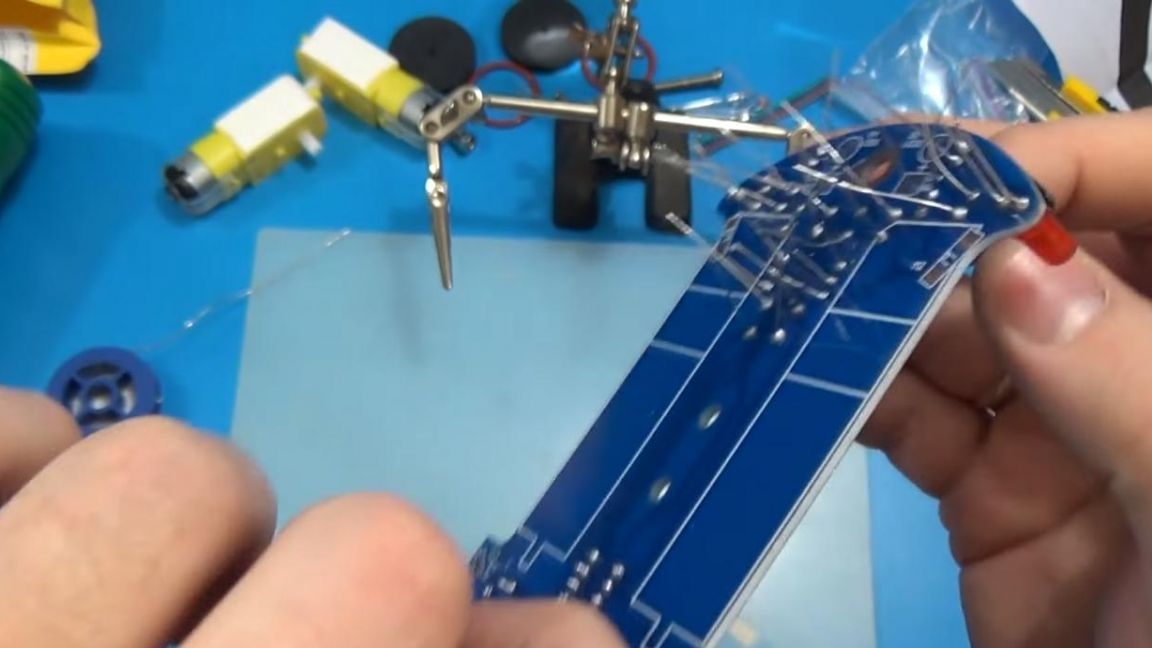
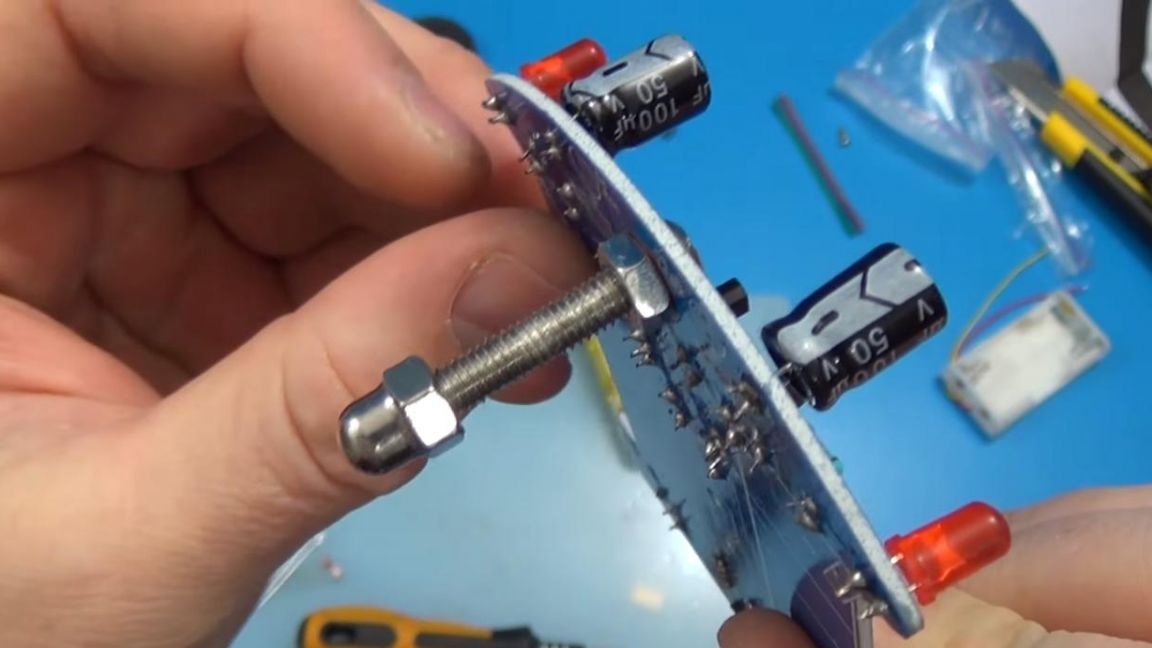
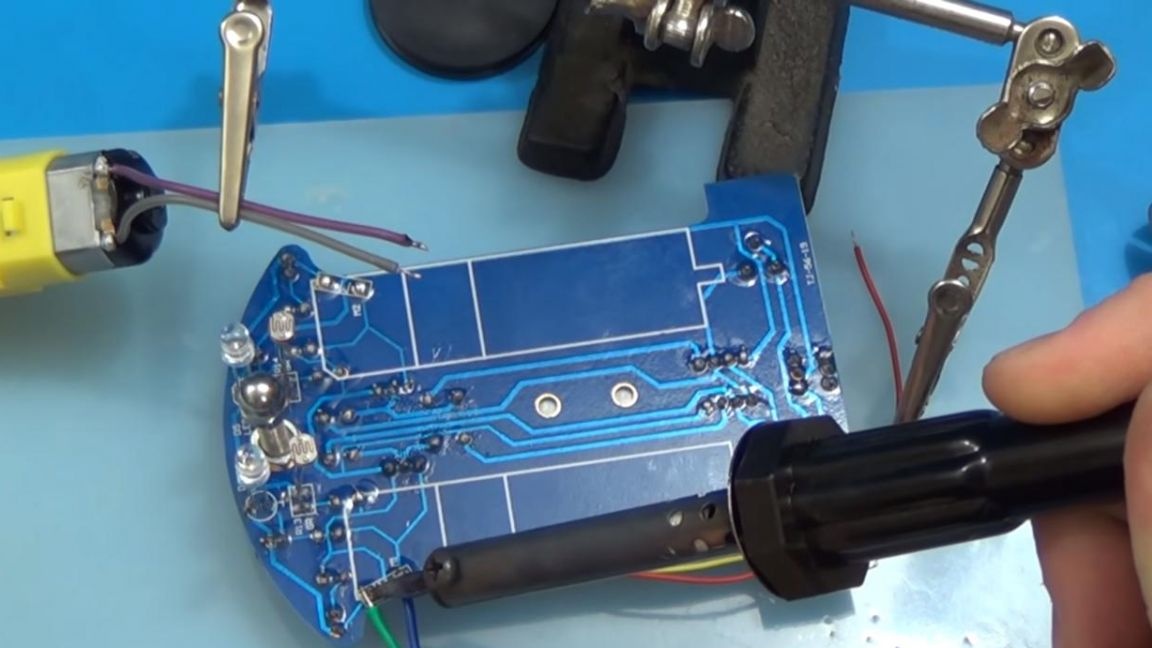
On aika juottaa taululle asetetut komponentit, kiinnitämme sen juotoslaitteeseen ”kolmas käsi”, levitämme fluxia ja juotosta, syöttämällä hiukan juottoa.
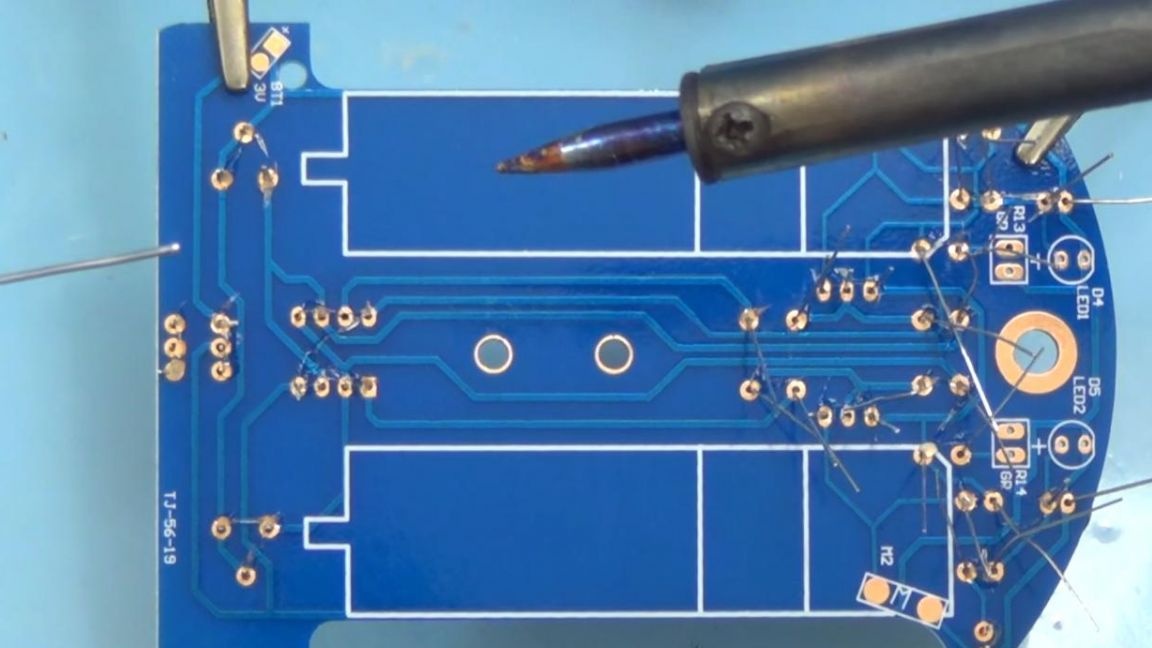
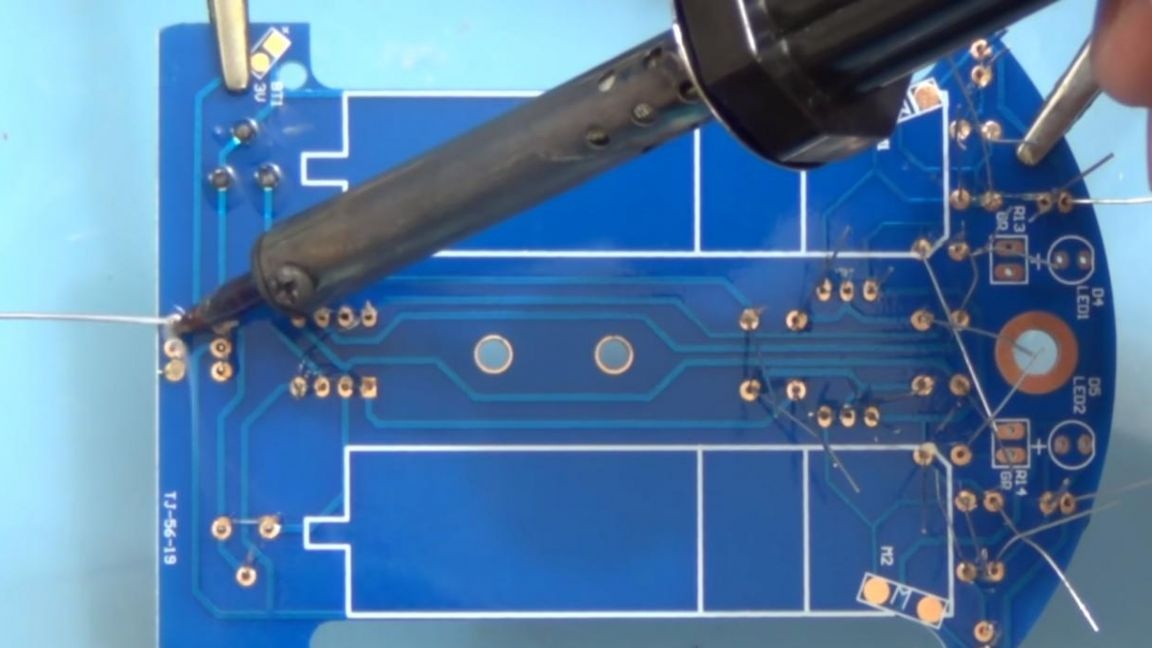
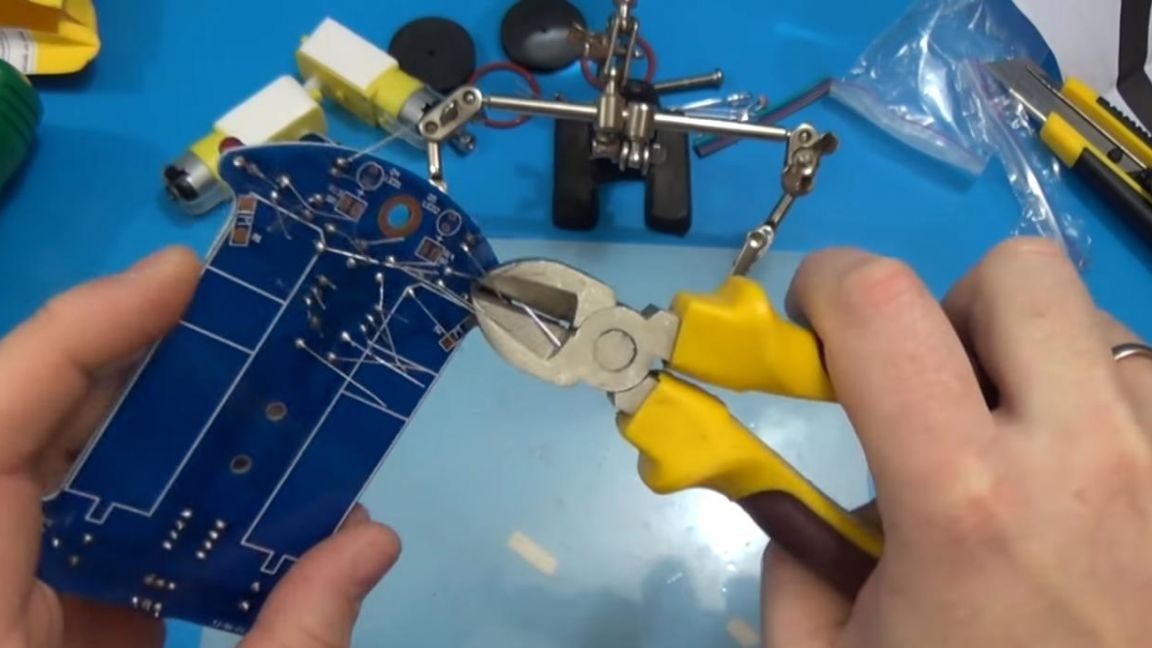
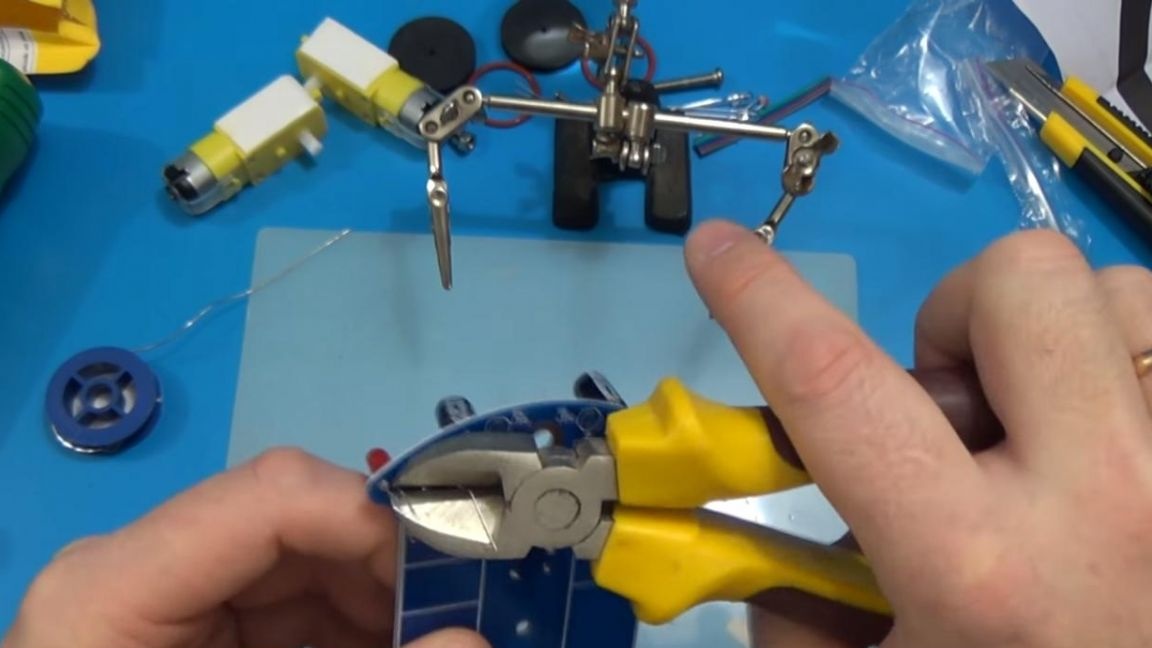
Juottamisen jälkeen poistamme johtopäätösten jäänteet sivuleikkureiden avulla, mutta ole varovainen tässä, koska kosketuslevyjen ja itse teiden repiminen on helpointa tässä vaiheessa.
Vaihe viisi
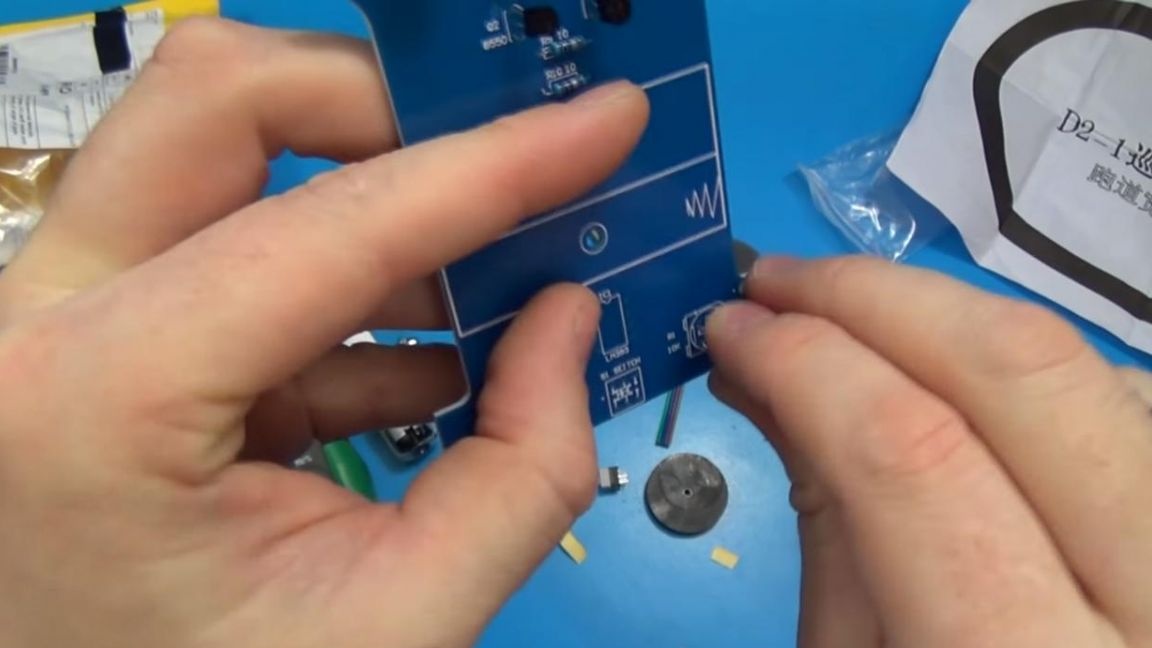
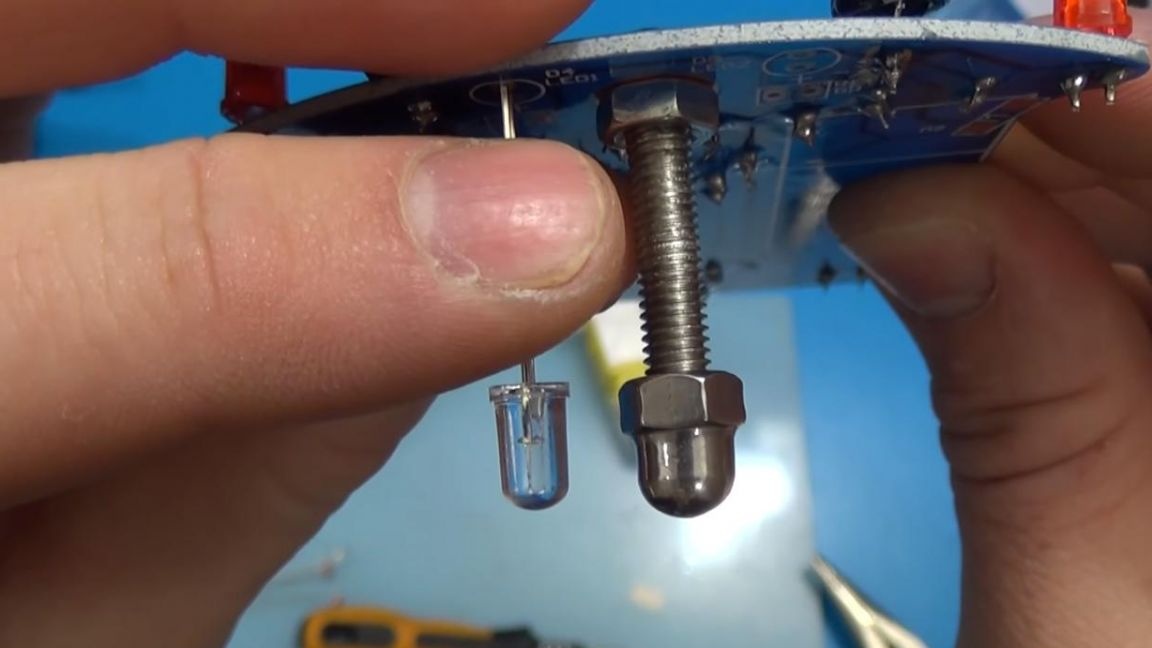
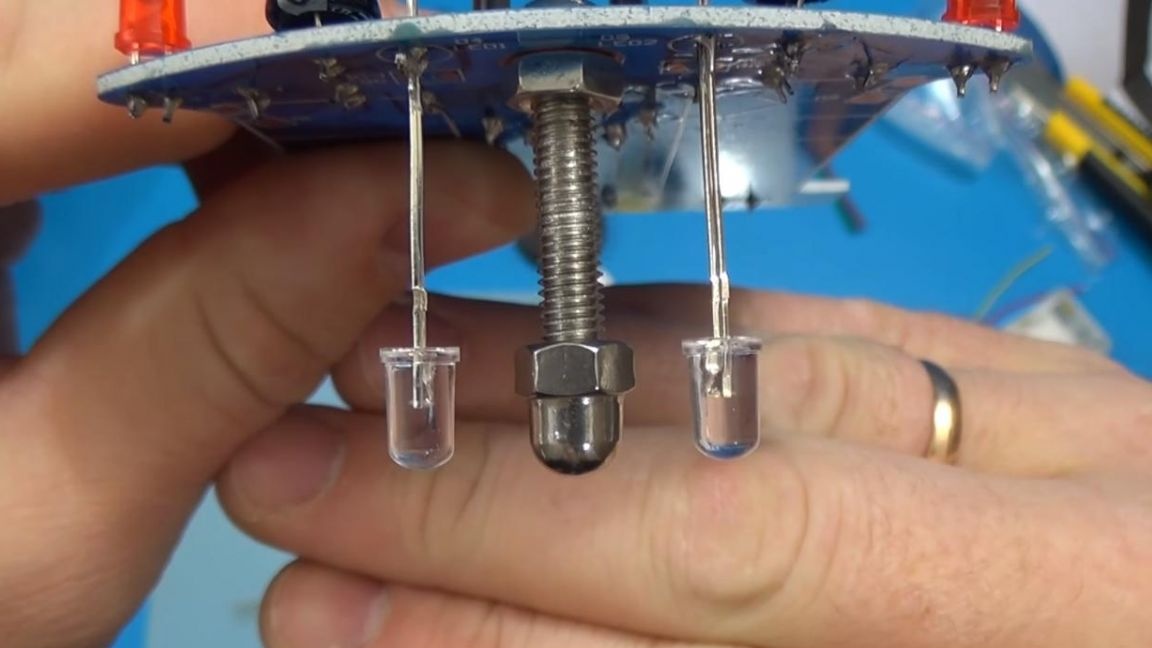
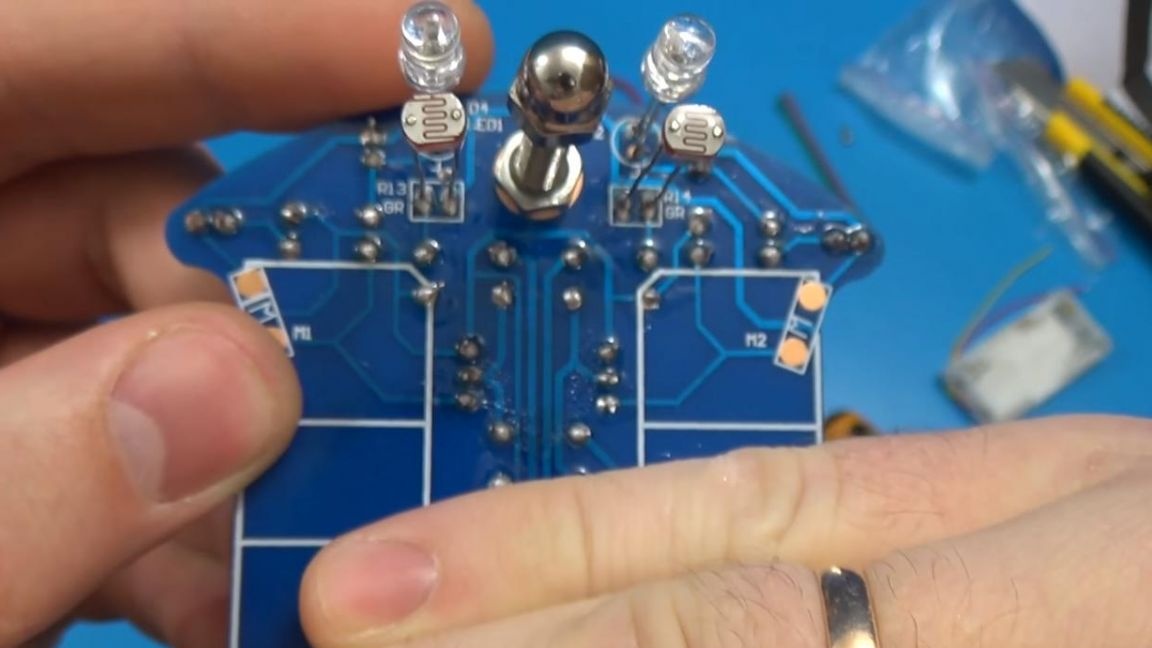
Kiinnitämme nyt ruuvin taululle ja asennamme sen viereen valkoisia LED-valoja. Niiden etäisyyden tulisi olla 1-2 mm pienempi kuin ruuvin jatke. Tämä näkyy selvästi kuvassa, jos tätä ei noudateta, fotorezistorit toimivat huonommin tai eivät toimi ollenkaan .

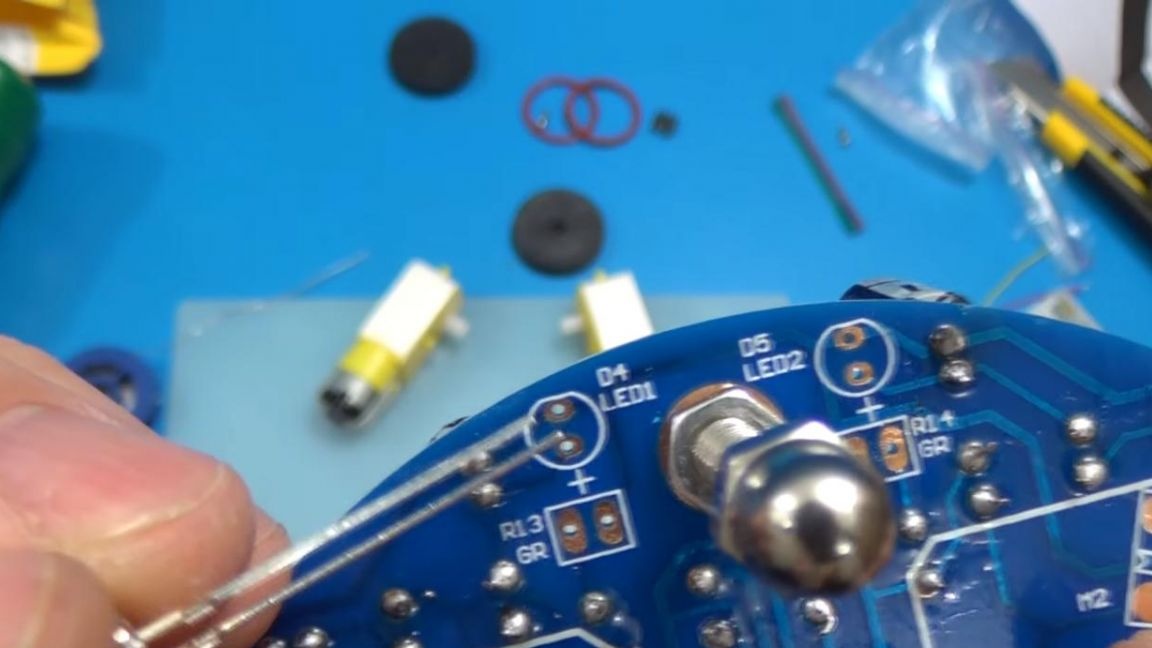
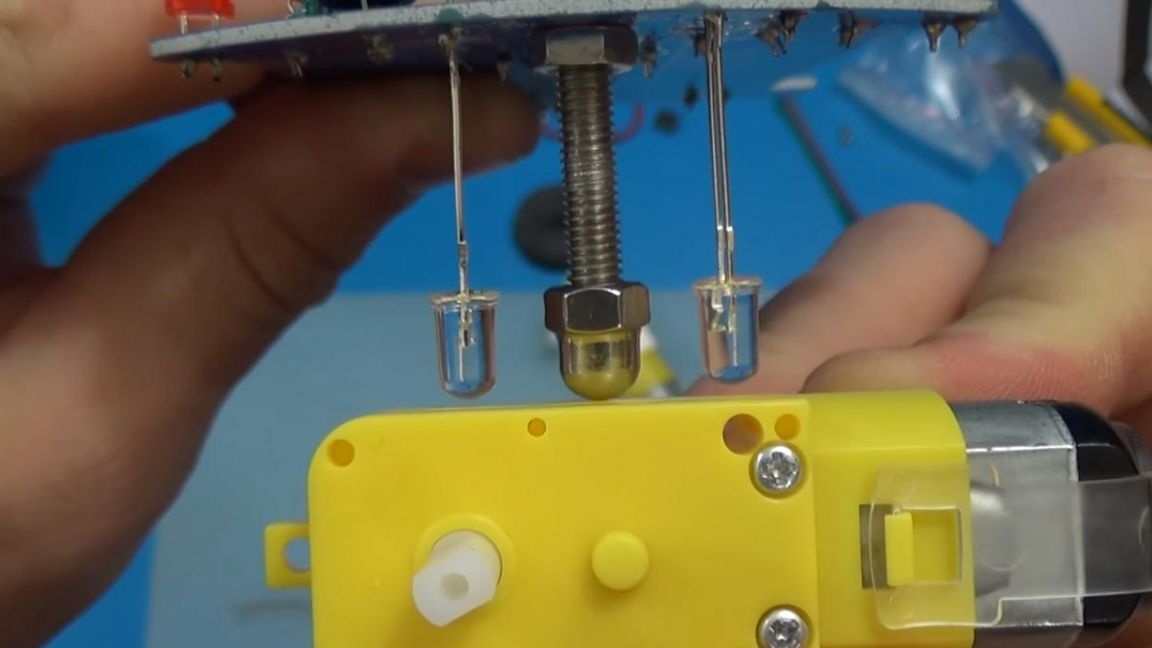
Taulun viereen juotamme valotutkijat samalla etäisyydellä kuin LEDit.

Vaihe kuusi
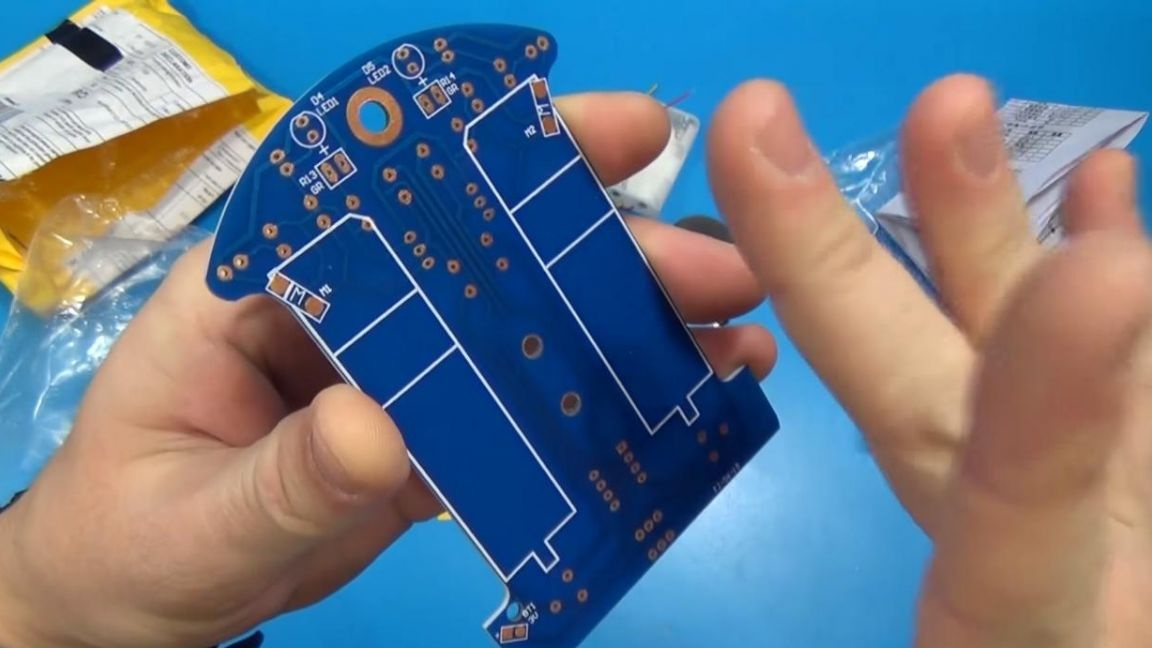
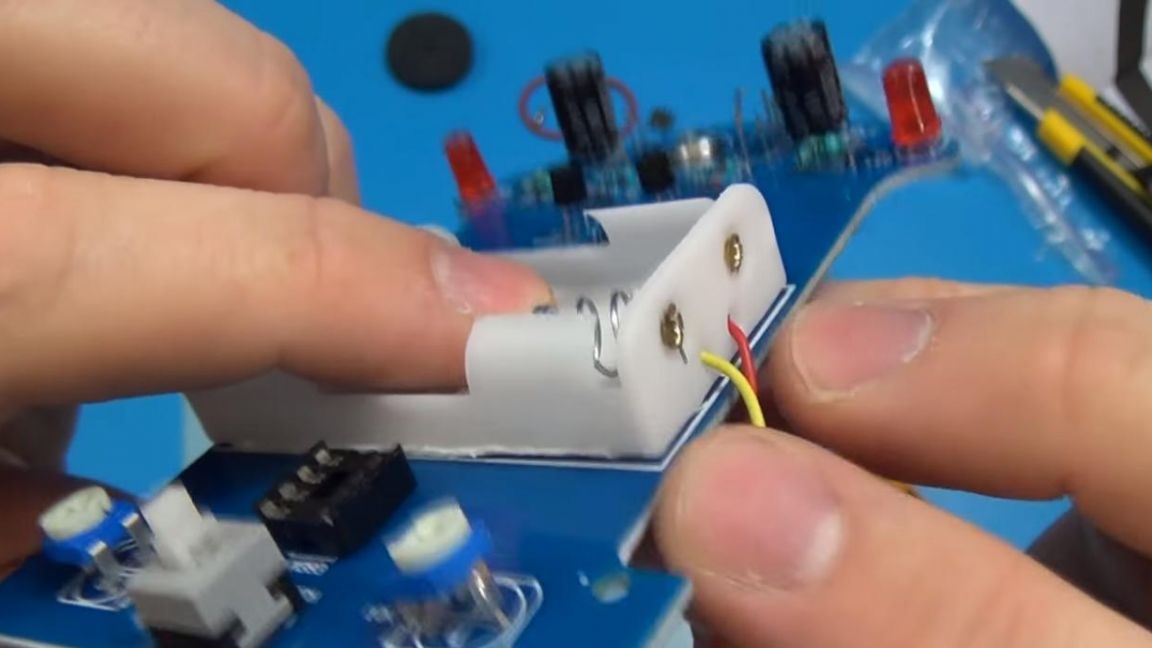
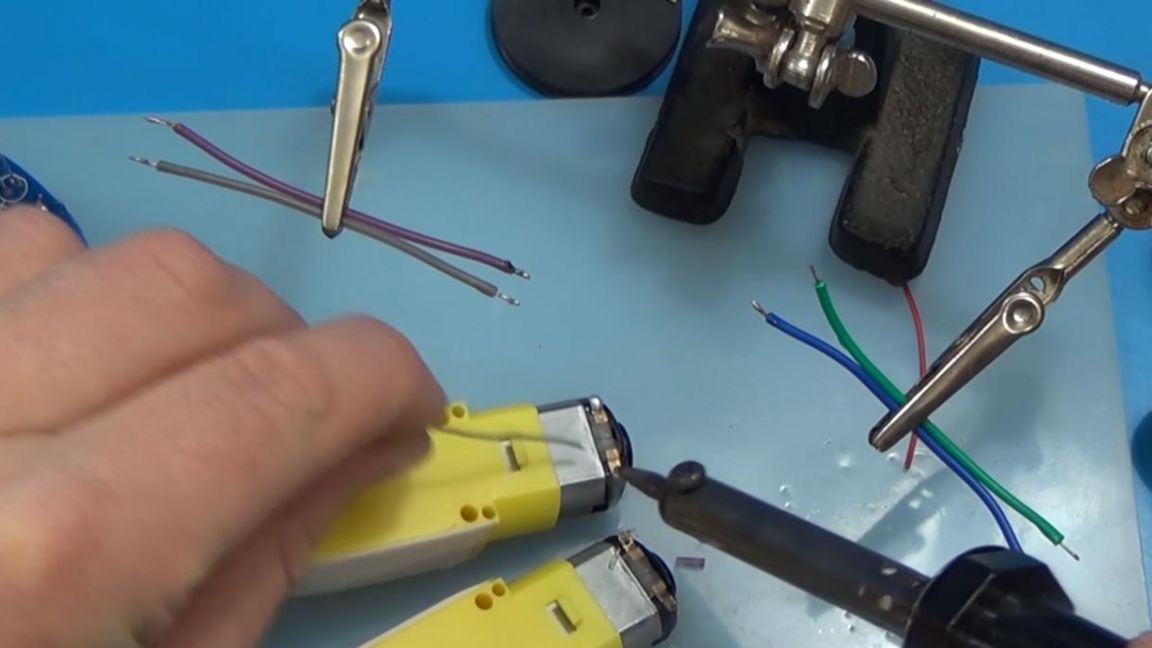
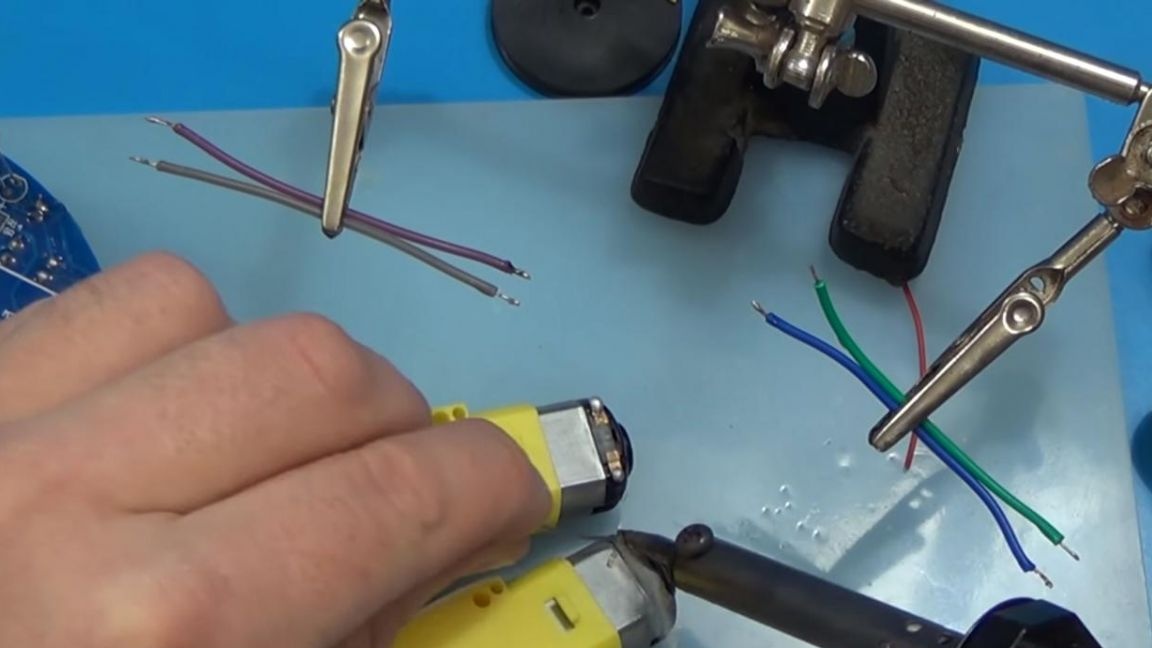
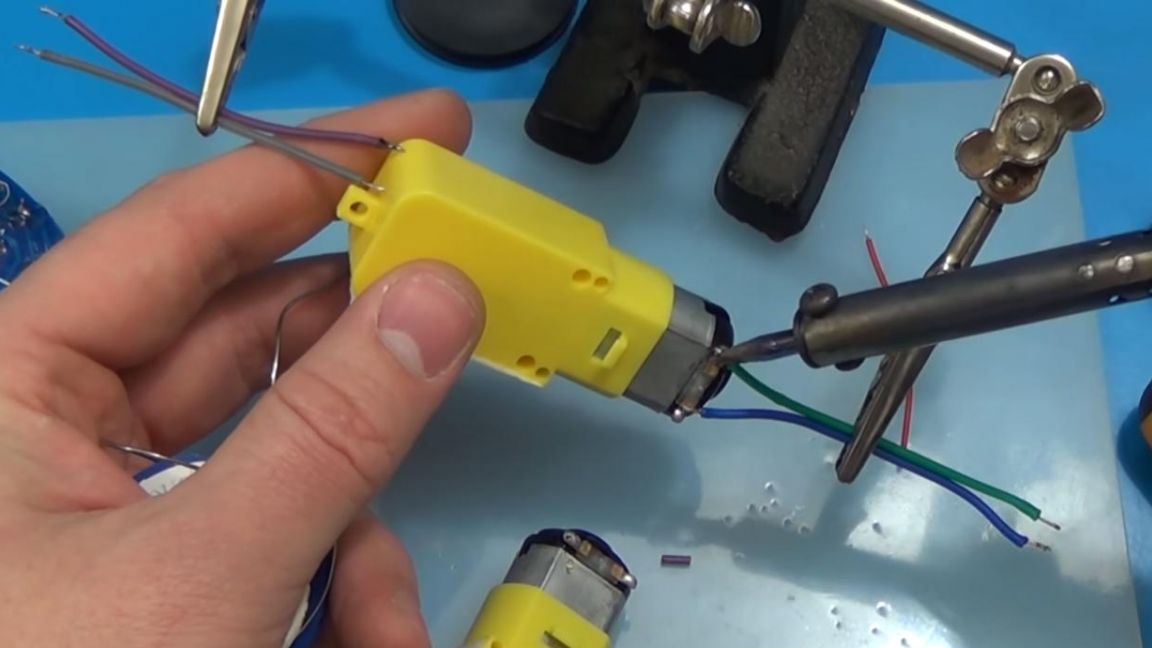
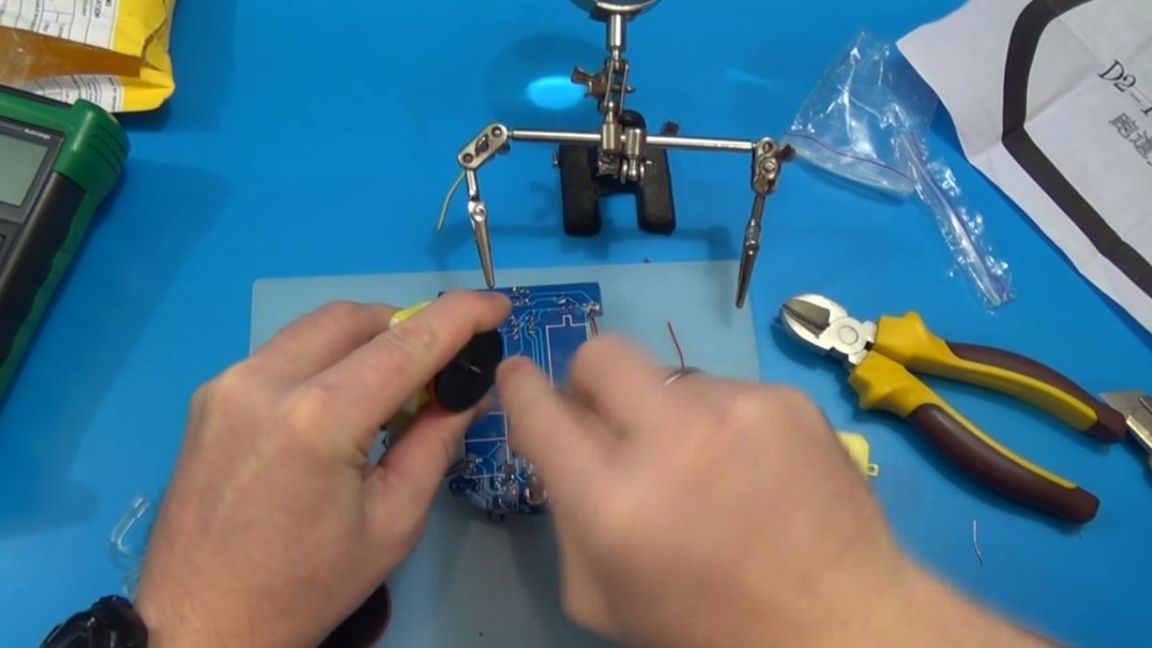
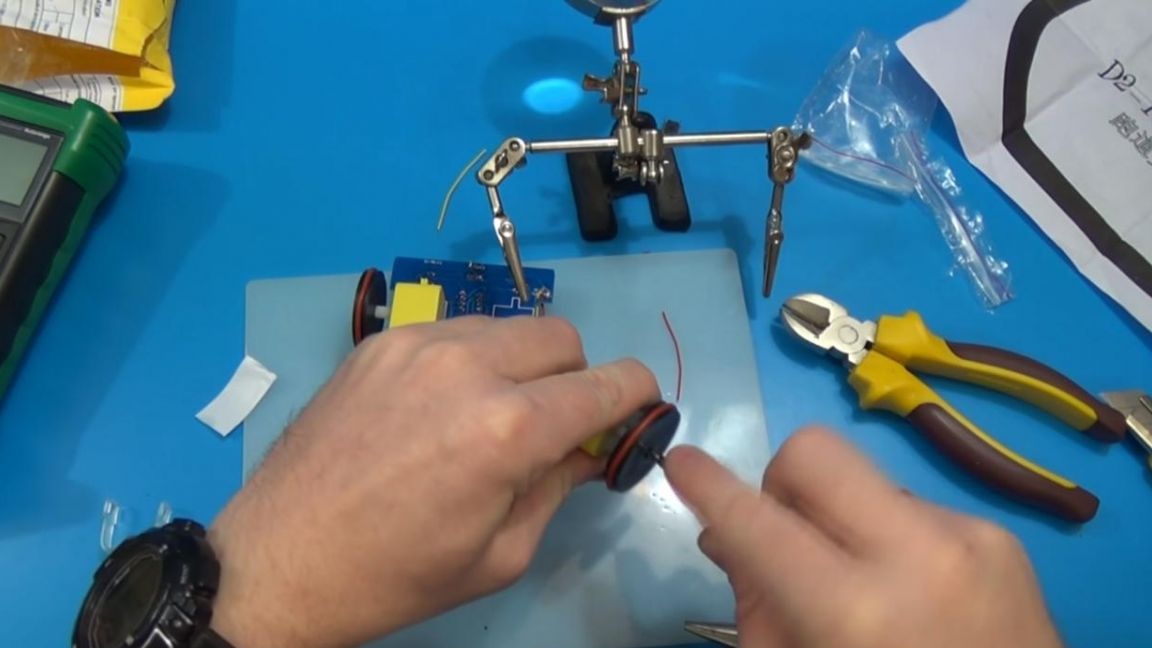
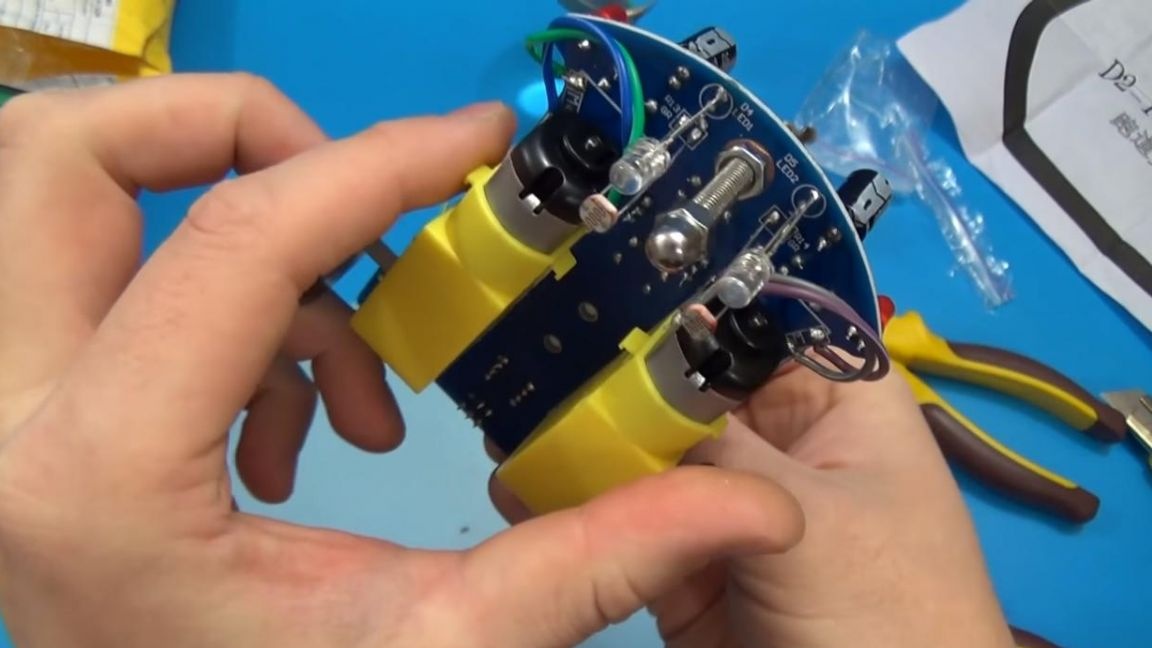
Sitten otamme moottorit vaihdelaatikoilla, niiden koskettimet on ojennettava ja kaksi johtoa juotettava niihin, liimaamme myös kotelon AAA-paristojen asentamiseen ja juotosmekanismin keltainen johdin miinus ja punainen johdin plus, koska se on allekirjoitettu taululle.
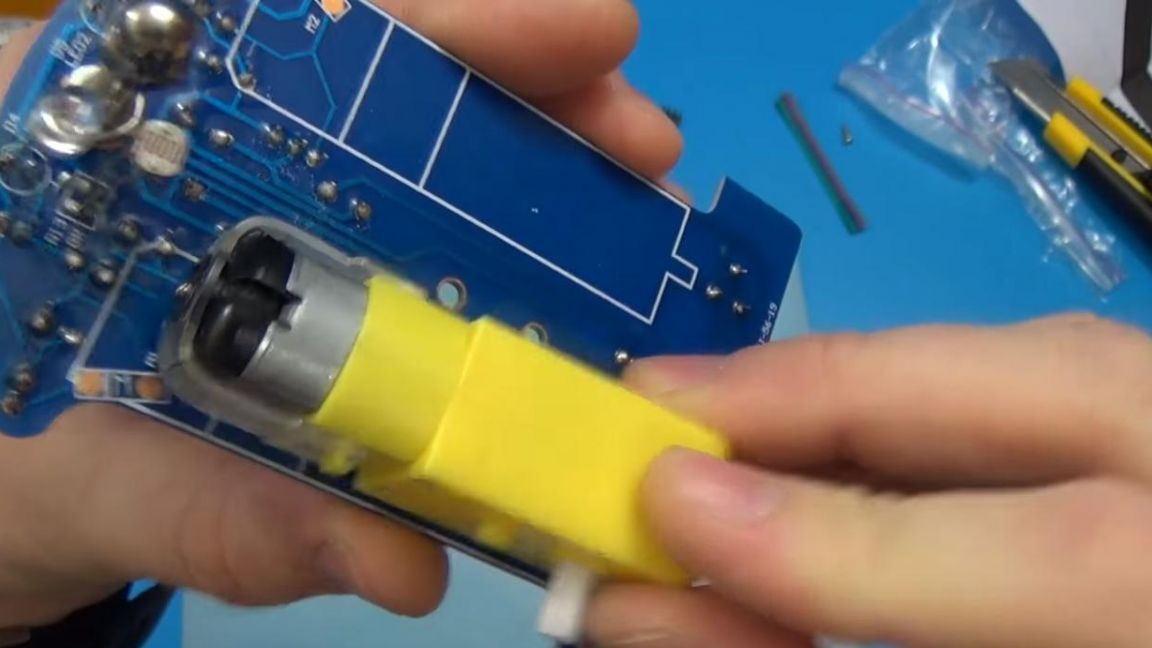

Ennen moottorien kiinnittämistä on kiinnitettävä pyörät niihin, jotka on kiinnitetty yhdellä pultilla, ja itse pyörään kiinnitetään kumimatto paremman pidon varmistamiseksi.

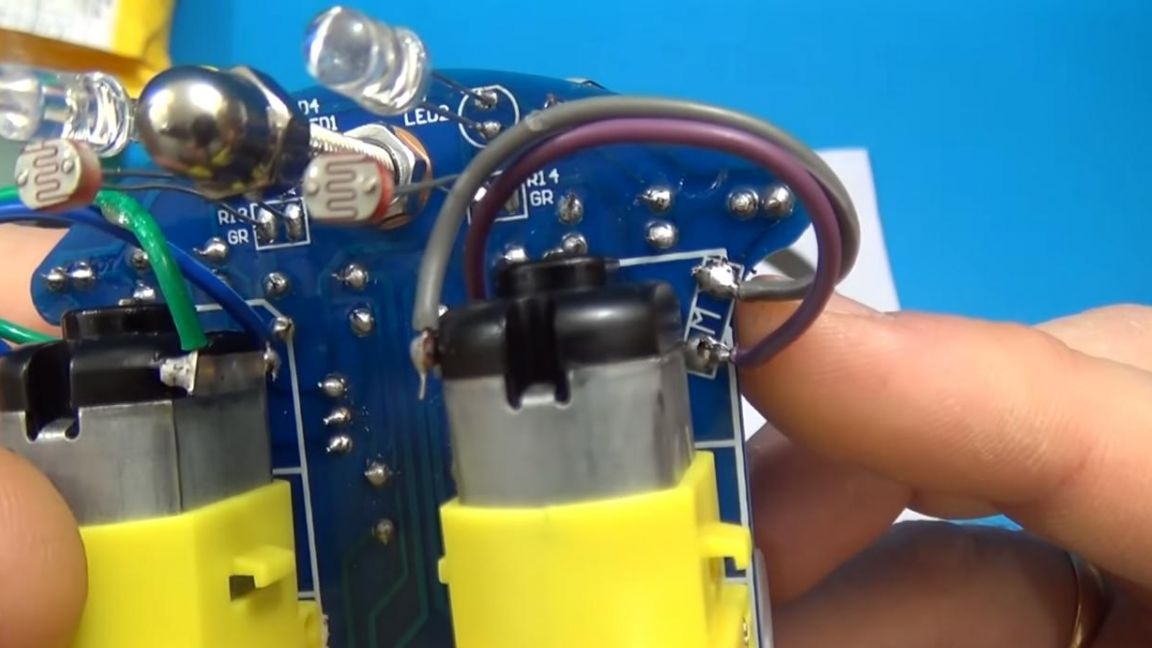
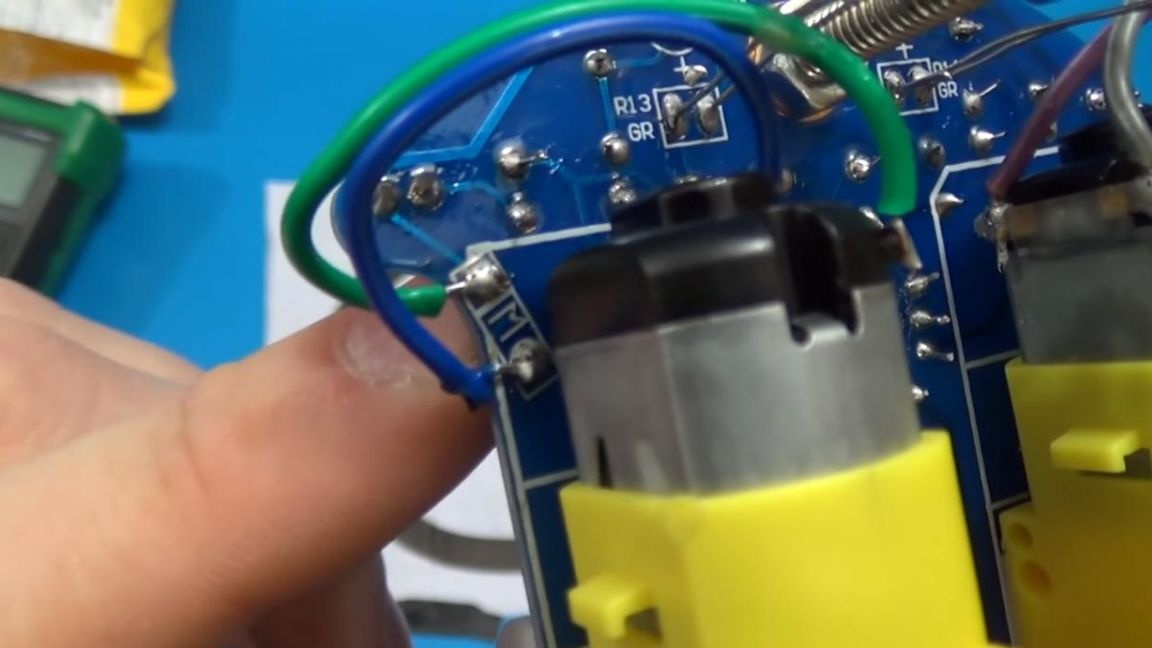
Juottamme johdot moottoreista levylle, valitettavasti missä on plus ja missä miinus ei ole tässä osoitettu, mutta kokeilun ja virheen avulla todettiin, että moottorin yläkosketin on kytkettävä levyn yläosaan johdolla ja juotosraudalla, vastaavasti pohjan kanssa, teemme samoin .
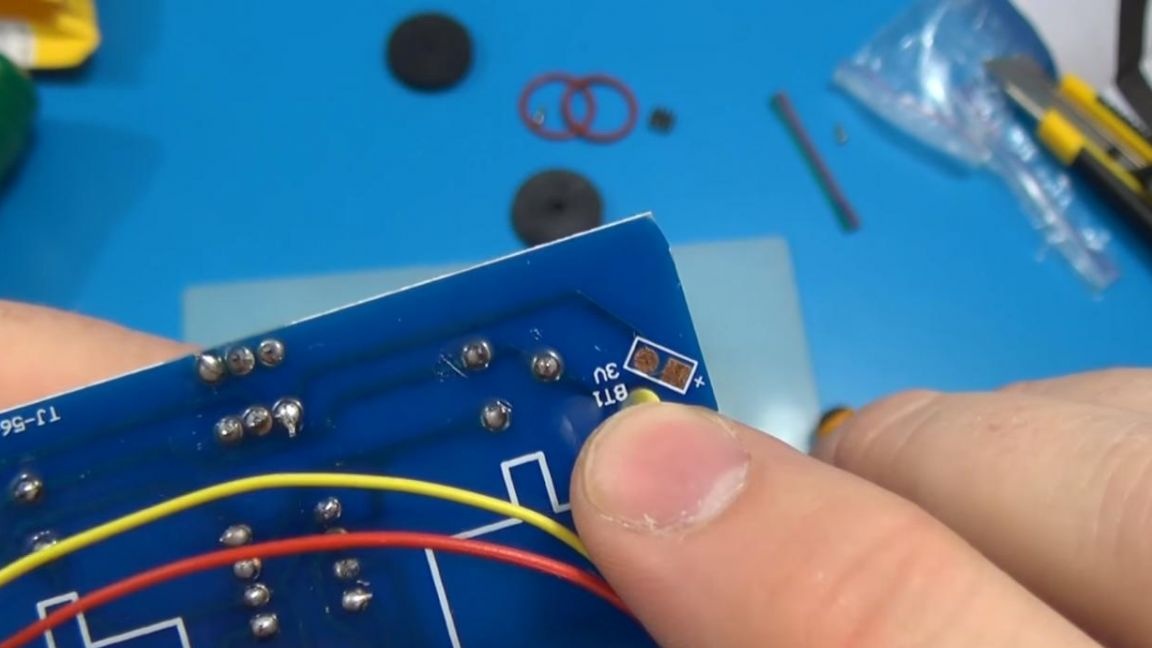
No, kokoonpanon lopussa on vielä asennettava siru taululle oikeaan paikkaan, yhdistettävä avain levyyn ja asetettava paristot paikoilleen napaisuutta noudattaen.

Seitsemäs vaihe.
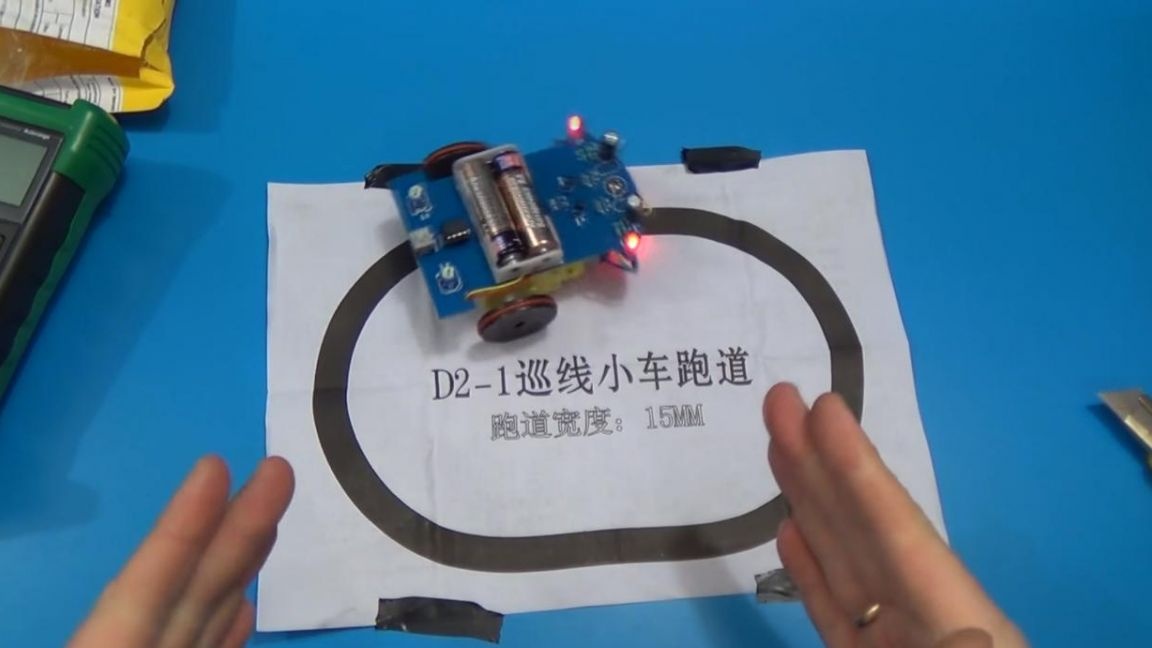
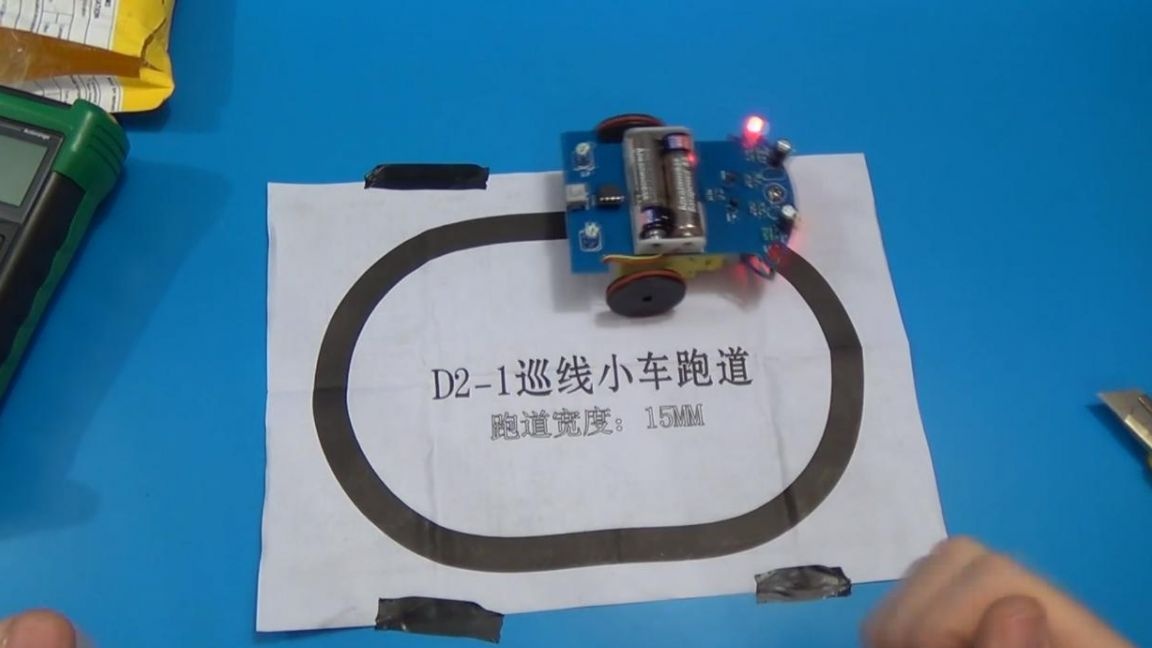
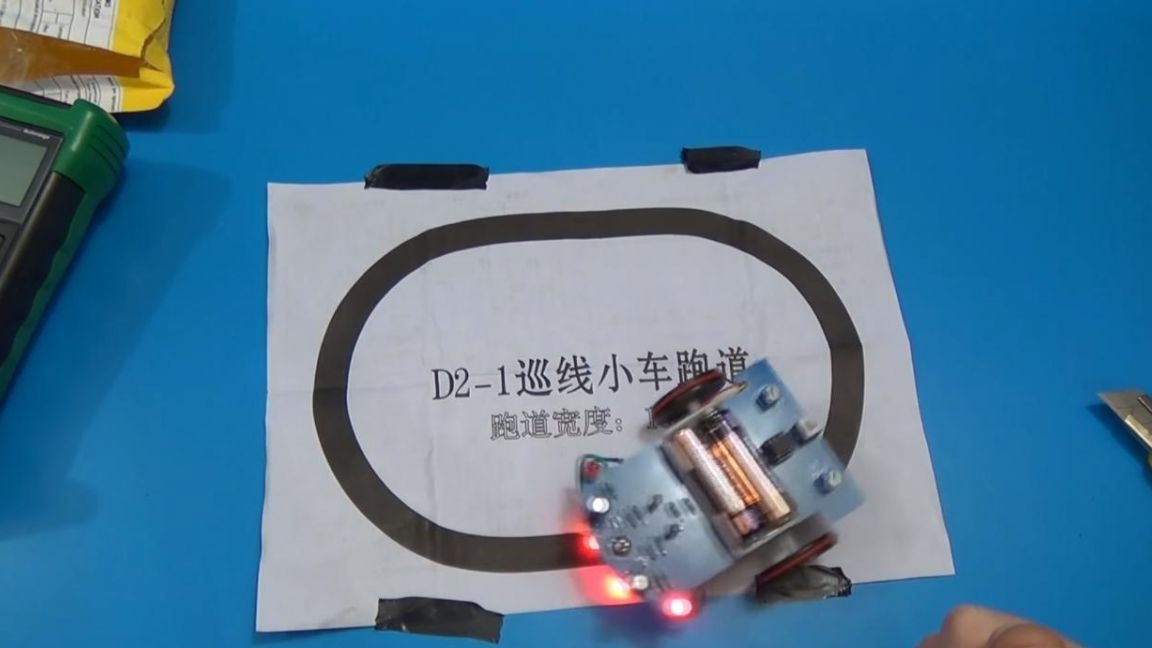
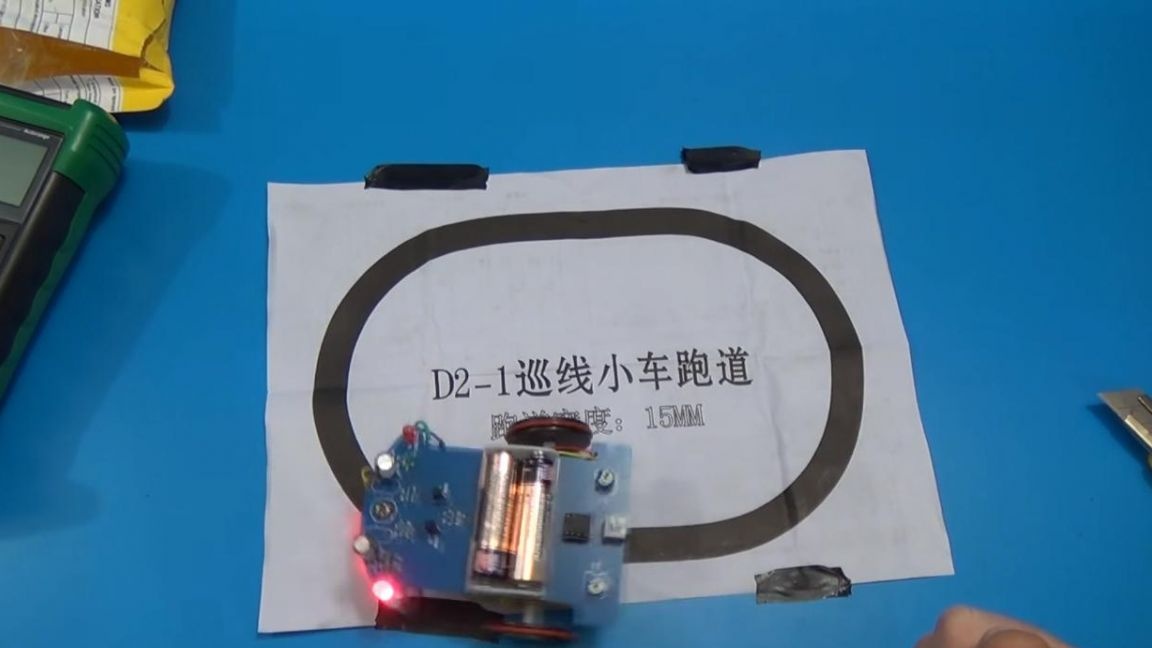
Joten on aika testata tätä robottia, pakkaus sisälsi ohjeet, joiden takaosaan piirrettiin soikea viiva, jonka leveys oli 15 mm, mikä on optimaalinen arvo.
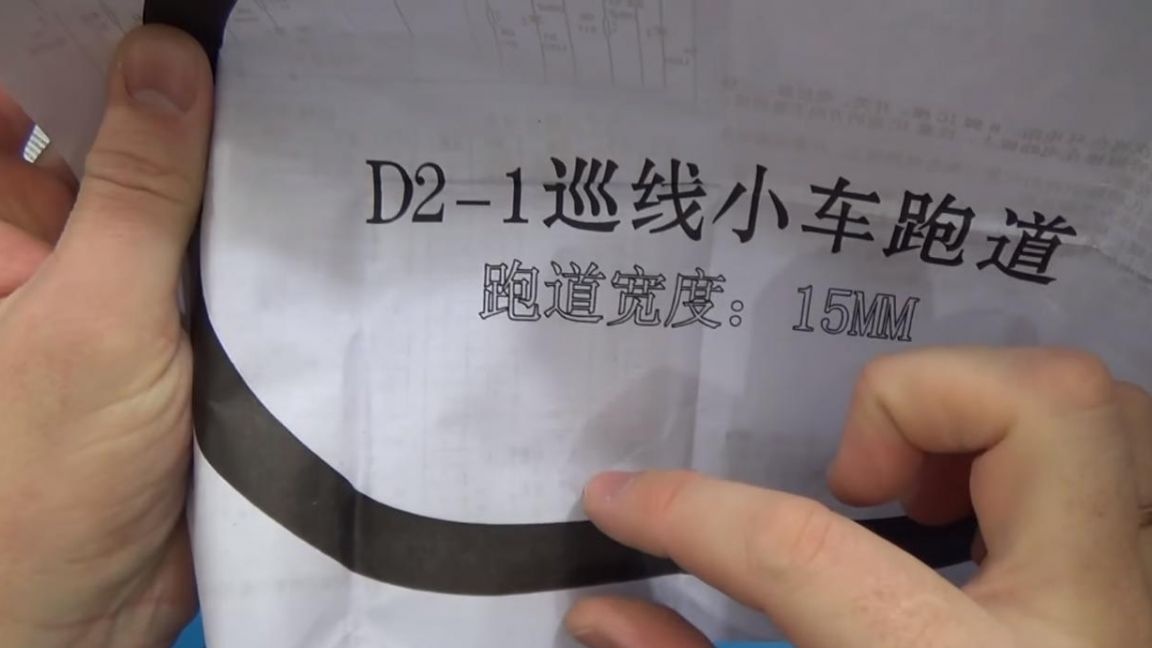
Paina virtapainiketta ja robotti Menin, hänen asianmukaisen toiminnan vuoksi linjojen ei tulisi olla teräviä, toisin sanoen hän ei pysty tekemään teräviä käännöksiä. Voit esimerkiksi tehdä radan tasaisilla kierroksilla levittämällä 15 mm leveän eristeteipin tasaiselle pinnoitteelle.
Minusta kaikki, kiitos kaikille huomiosta ja luovasta menestyksestä.