

Tänään, Instructables -kirjailija, nimimerkillä Techgenie, puhui missä elektroniikka siellä on. Ja hän toi linkin ensimmäiseen, jossa se ei ole - vain sähköasentaja. Se on tyylikäs, ja siitä keskustellaan käännöksessäni.
Jos et vieläkään halua, että sinulla olisi sellainen, katso video ja toivota tätä laitetta kotiisi ensimmäisistä katselu sekunneista:
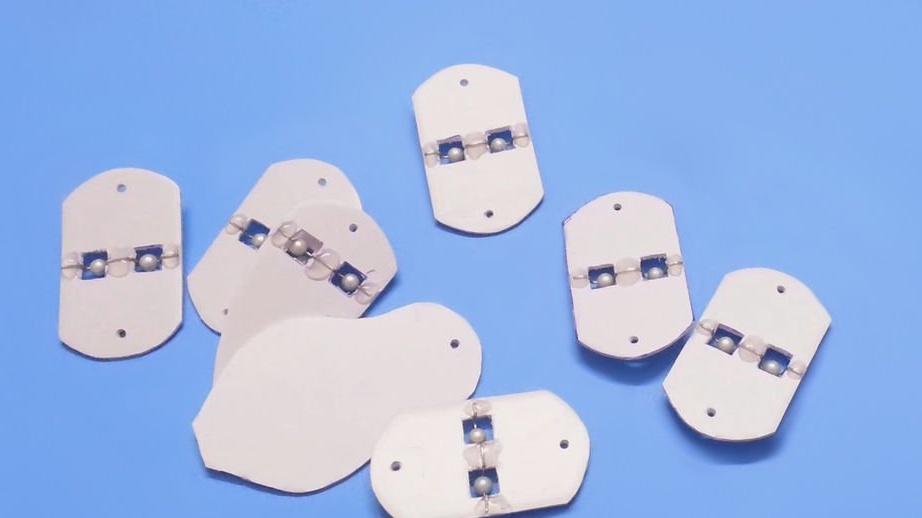
Mestari leikkaa robotti käärme linkit pahvista:
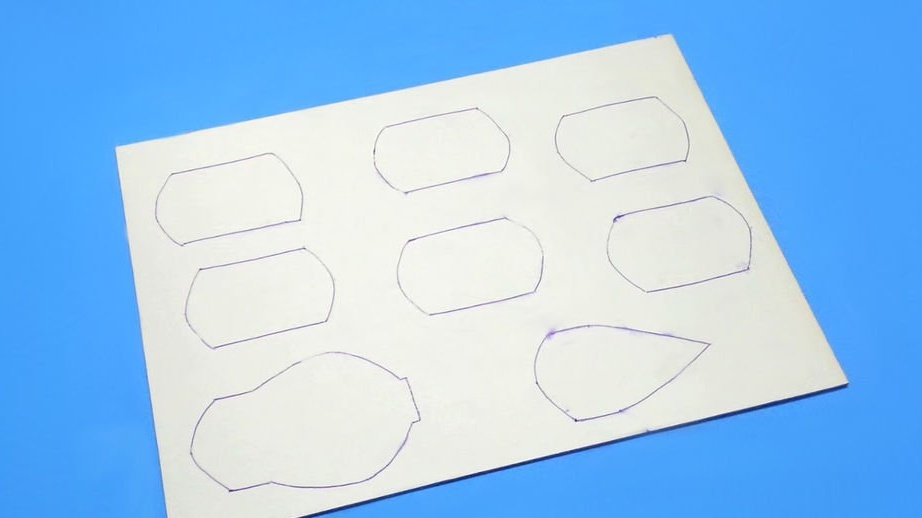
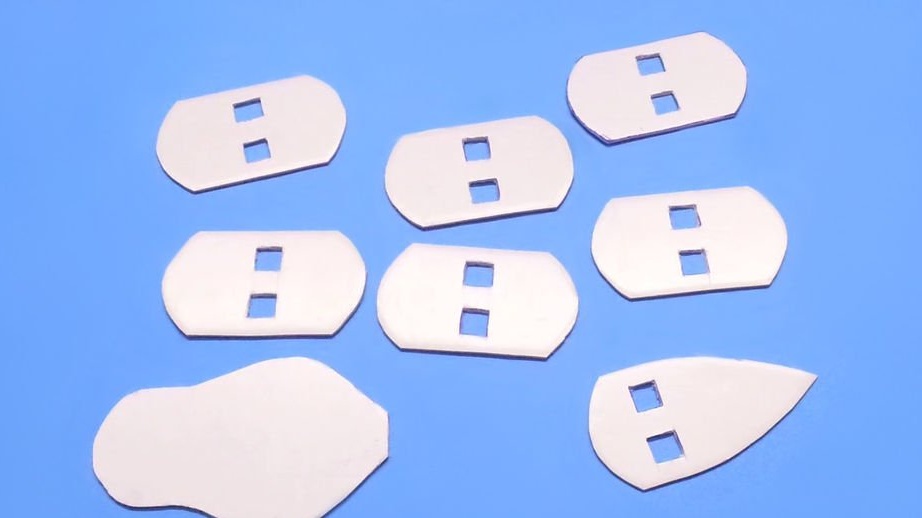
Otteet arkista:

Tekee niistä neliöreiät teloille:
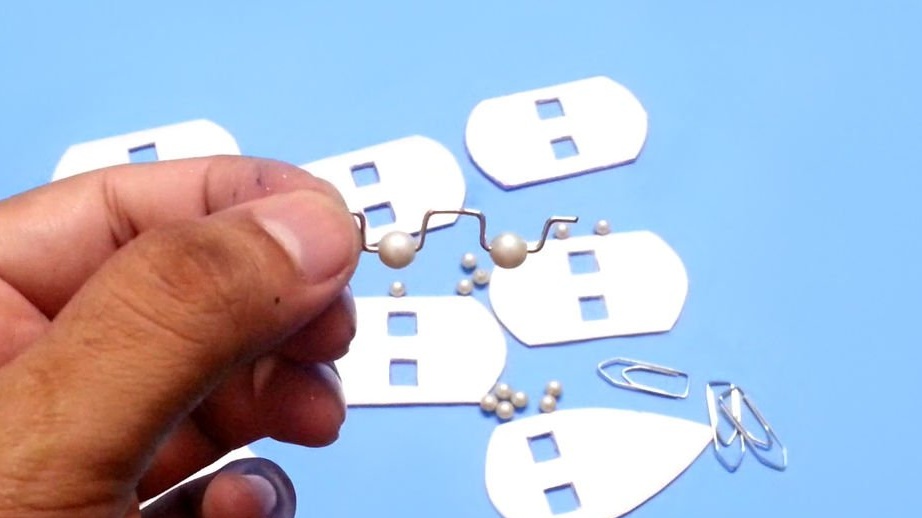
Mikä helmiä ja paperiliittimiä, terveisiä "DU Vasily Biletsky":
Kiinnittää telojen akselit liimapistoolilla, varmista, etteivät rullat itse ole juuttuneet liimaan. Poraa reikiä linkkien yhdistämiseen:
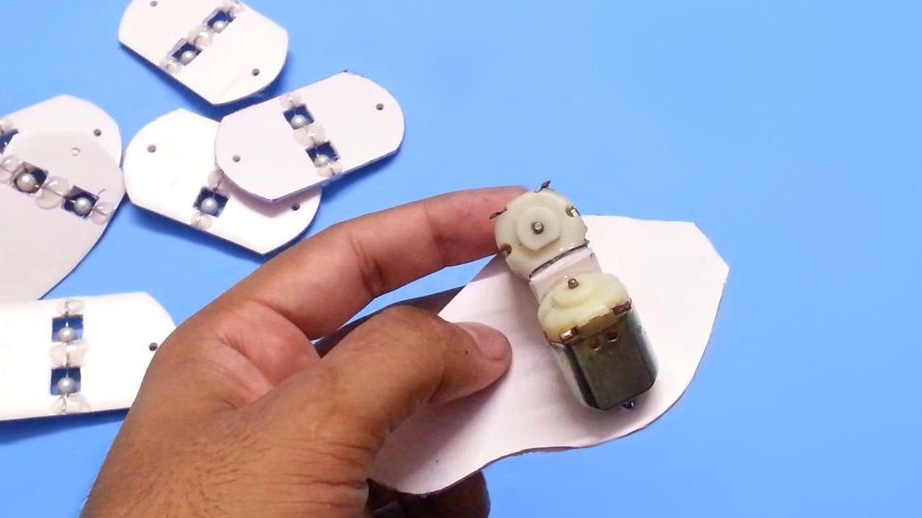
Kiinnittää kolmion muotoinen pidike tasavirtamoottoreihin:

Käyttää moottoreita, muistiinpanoja reikien poraamiseen akseleille, porakoneille, kierteitetyille akseleille, liimamoottoreille:
Moottorien akseleilla valmistaa kuumasulatettavia liimapalloja:
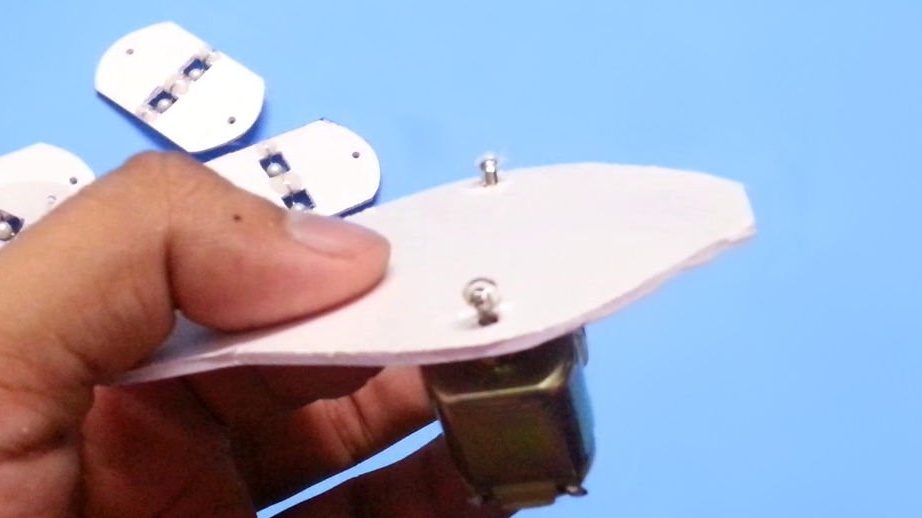
Yhdistää linkit ... johtoon ja painikkeisiin:
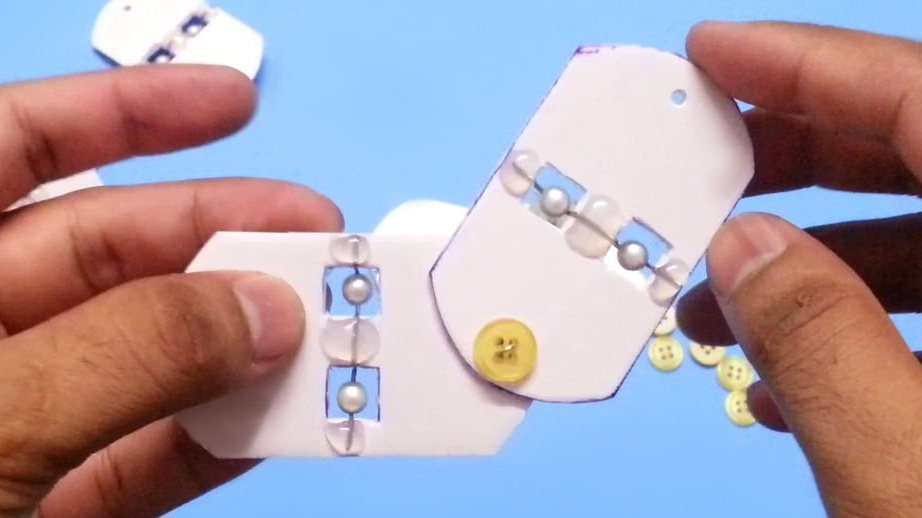
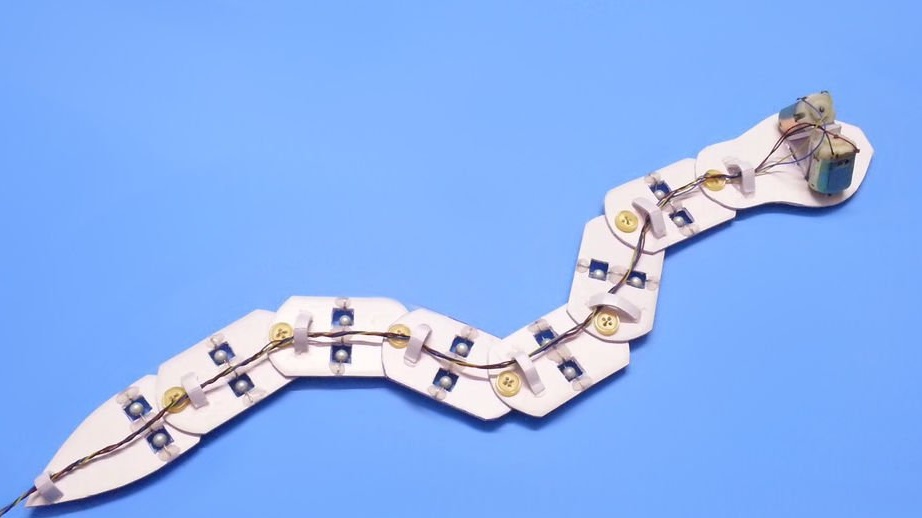
Robotti käärme on koottu, mutta se on edelleen liikkumaton:

Hän katkaisee pahvinauhat, vie nelisuuntaisen kaapelin, juottaa kaksi johtoa molemmille moottoreille, kiinnittää ensimmäisellä nauhalla:

Ja loput:
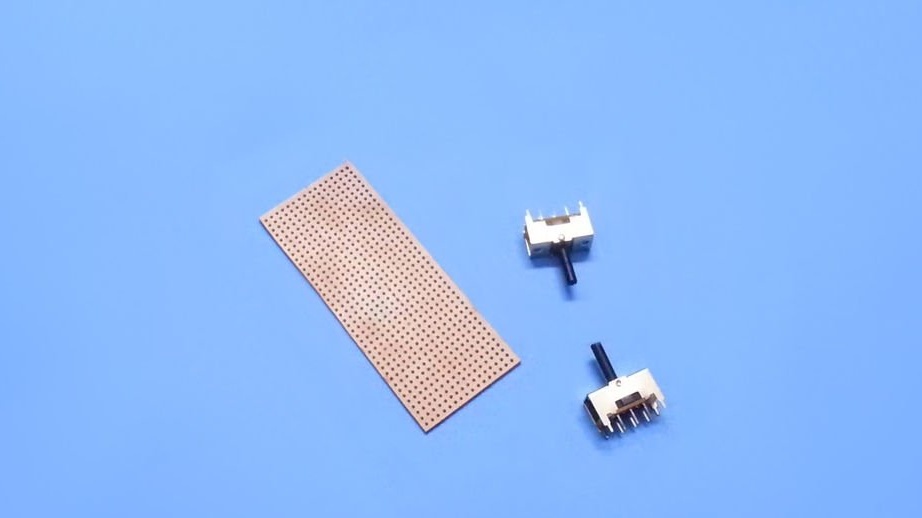
Se vie kaksi kytkintä kolmeen asentoon (keskeltä pois päältä) ja kahteen suuntaan, samoin kuin pala ovilevytyyppistä leipätaulua:
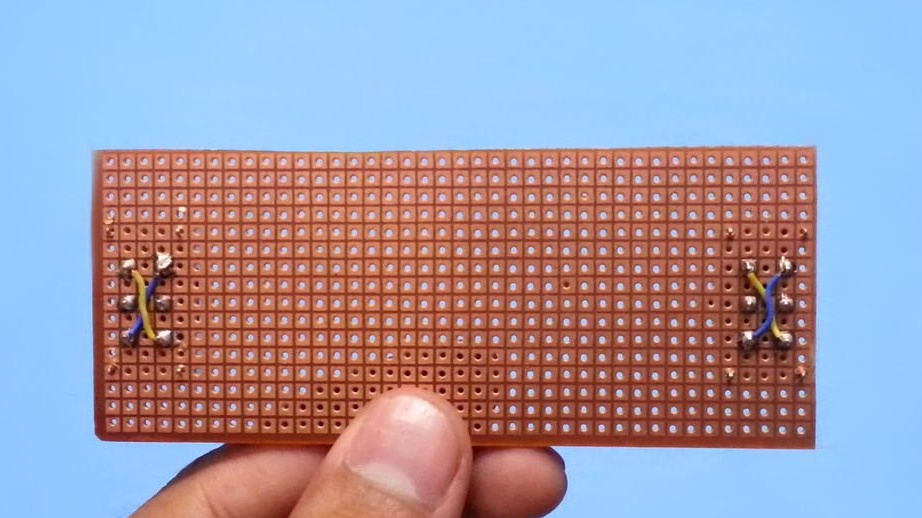
Muuttaa molemmat kytkimet puseroilla palautuviin:
Hän tekee jouset 18650-akulle paperiliittimistä, asettaa sen. Älä tee sitä! Ota valmis osasto! Käytä akkua vain suojauksella! Parempi vielä, lokero 2 kpl: lle. AA tai AAA sopivilla kennoilla tai paristoilla.
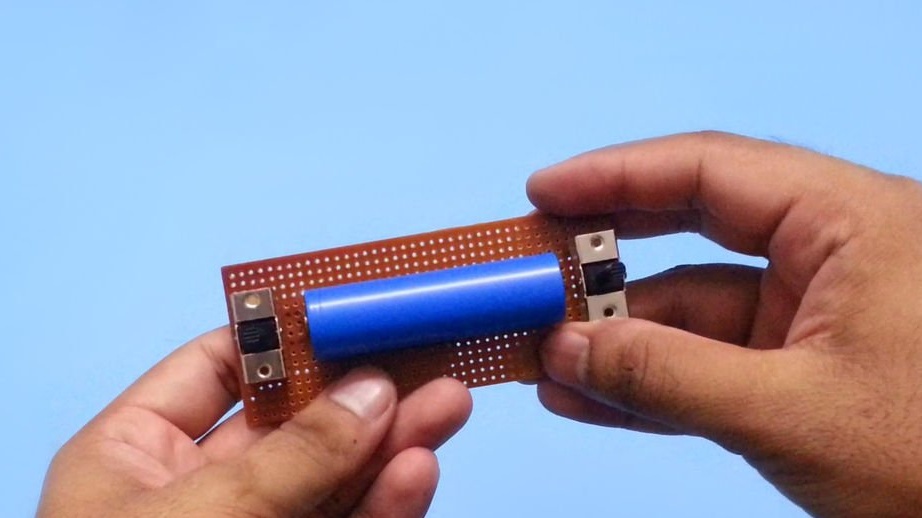
Pitkittäiset niitit lisäävät akun pitämistä paikoillaan:
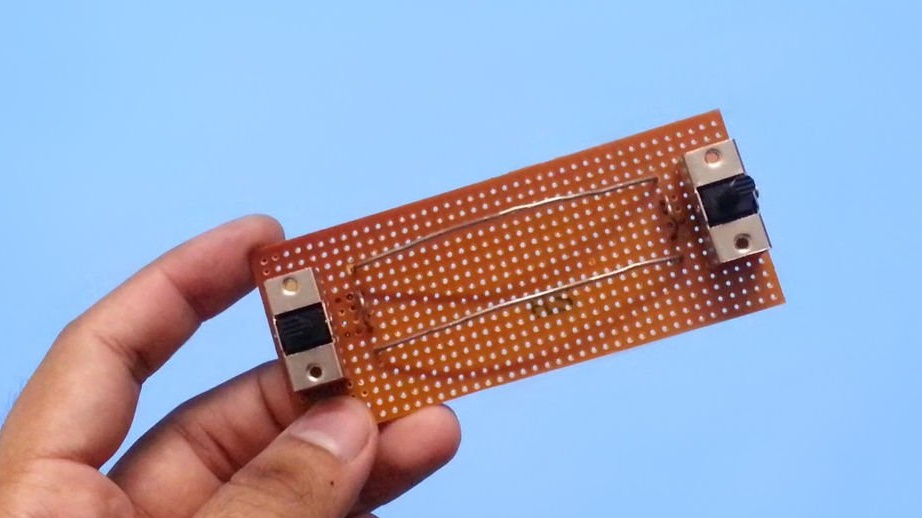
Joten vaikka kaukosäätimen takaosa näyttää:
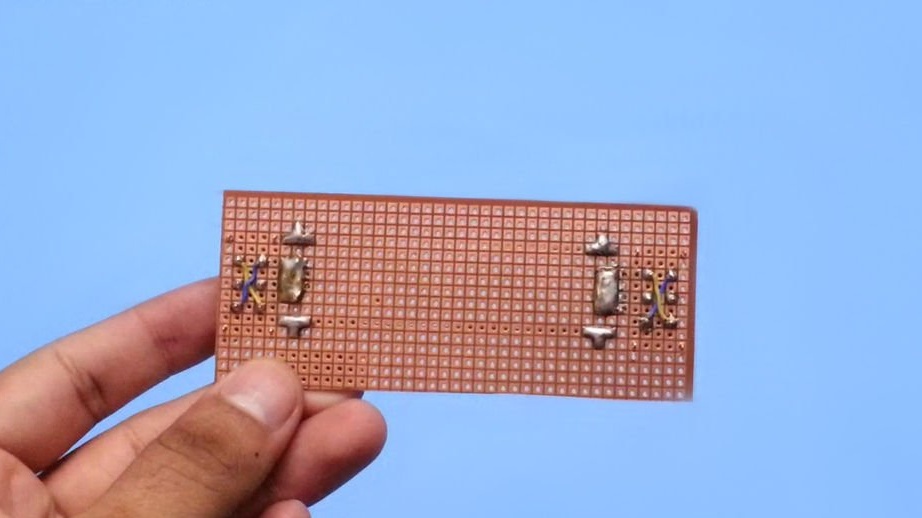
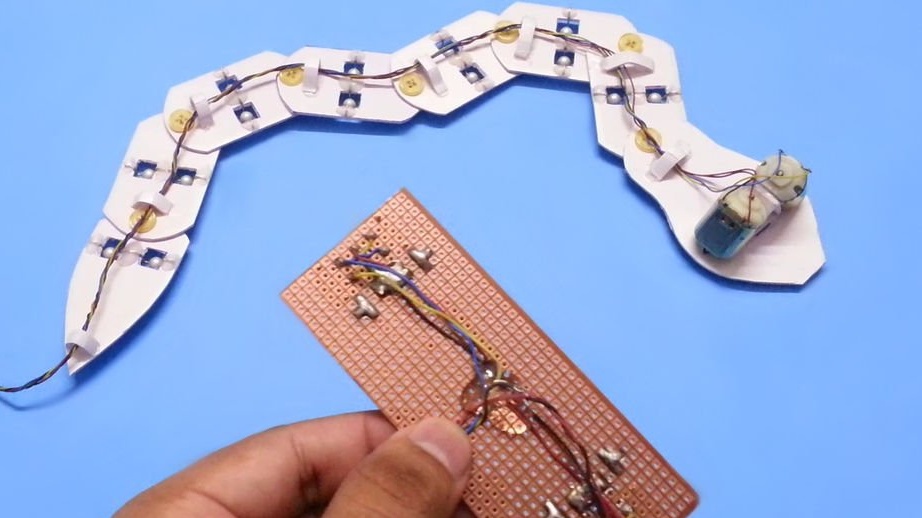
Päällikkö yhdistää robosnaken kaapelin, tekee kytkennät kaavion mukaisesti:

Nyt kaukosäätimen kortin kääntöpuoli näyttää erilaiselta. Kaapeli kiinnitetään kuumasulaliimalla, on tärkeätä, että liiman ja leipälevyn välissä on eristekerros tätä liimaa. Nyt levyn tämä puoli on peitettävä dielektrisellä, koska itse induktiopulsseja esiintyy, kun moottorit sammutetaan.
Se on kaikki tehty:

Robosnaken rakenneominaisuuksien takia moottoreiden on pyöritettävä vastakkaisiin suuntiin samoilla kytkinasennoilla samoissa kytkinasennossa. Jos näin ei ole, yksi niistä on peruutettava. Sen jälkeen valitse kokeellisesti kaukosäätimen sijainti, jossa kummankin kytkimen eteenpäin suuntautuva asento vastaa eteenpäin suuntautuvaa liikettä. Moottorit voidaan pysäyttää ja kääntää erikseen pakottaen robosnaken suorittamaan erilaisia temppuja.