







Projektin pääkonsepti on, että erilaisten aivoaaltojen avulla käyttäjä voi hallita robottia, kohdistinta tietokoneellaan tai kytkeä päälle / pois päältä kodin valot, kun taas mikrokontrolleri (Particle Photon) luo online-analyysin käyttäjän aivojen aalloista. Joten kyllä, tällä laitteella voit todella käyttää Ajatuksen voimaa
 ... Tämä laite ei ole tarkoitettu vain laiskoille tai faneille, se on luotu antamaan ihmisille mahdollisuus. jotka kamppailevat päivittäin vammaisuutensa kanssa. Robottikirjoittajan kehittämä toimii aivan kuin pyörätuolin järjestelmä koti automaatio auttaa käyttäjää hallitsemaan valoa tai televisiota, vaikka hän ei voi liikkua. PC-ohjaintila voi olla hyödyllinen jopa niille, jotka ovat täysin terveitä.
... Tämä laite ei ole tarkoitettu vain laiskoille tai faneille, se on luotu antamaan ihmisille mahdollisuus. jotka kamppailevat päivittäin vammaisuutensa kanssa. Robottikirjoittajan kehittämä toimii aivan kuin pyörätuolin järjestelmä koti automaatio auttaa käyttäjää hallitsemaan valoa tai televisiota, vaikka hän ei voi liikkua. PC-ohjaintila voi olla hyödyllinen jopa niille, jotka ovat täysin terveitä. Kuinka se toimii?
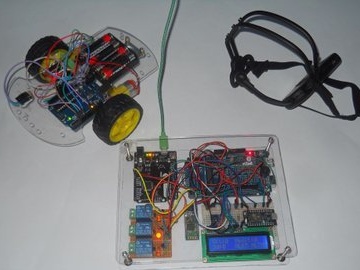

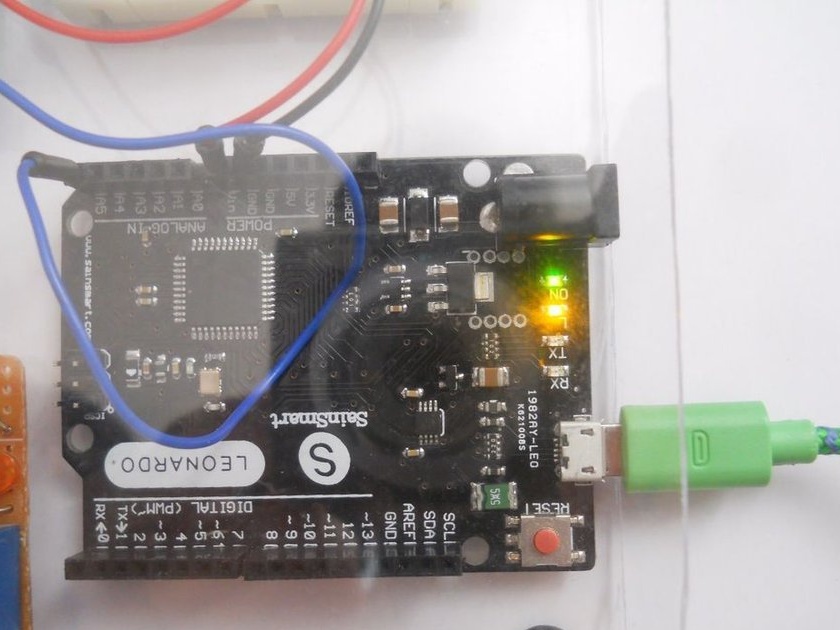
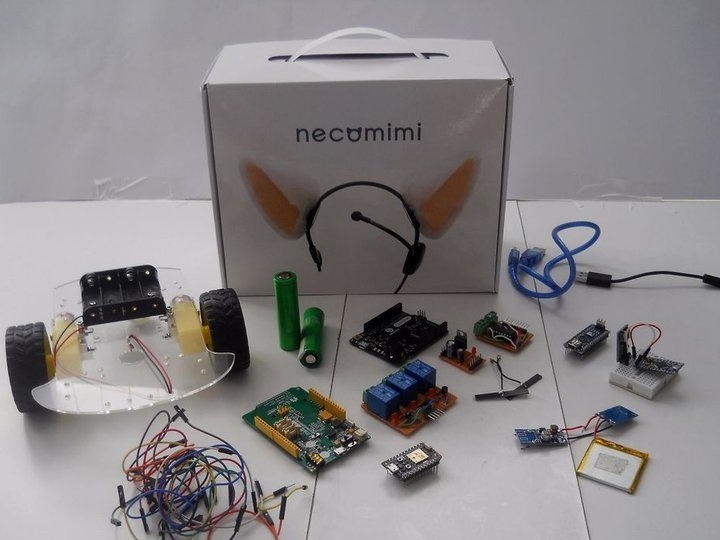
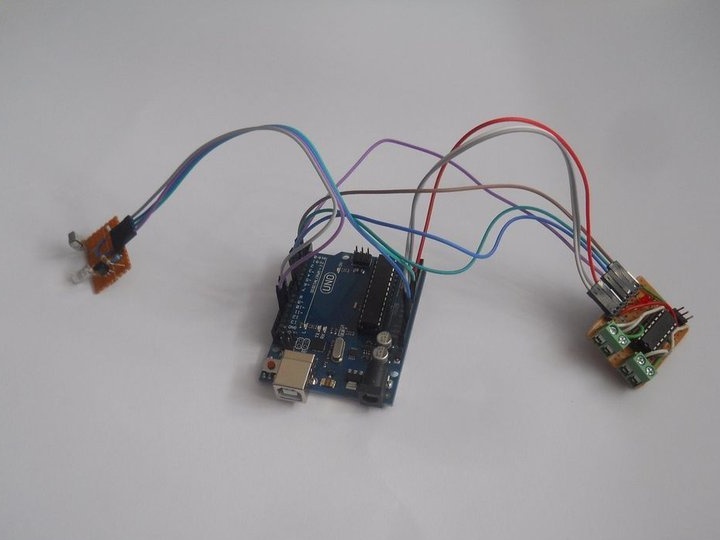
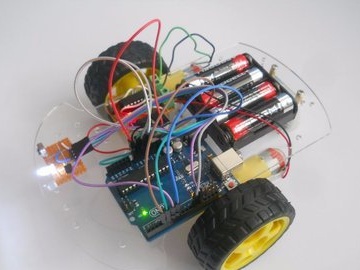
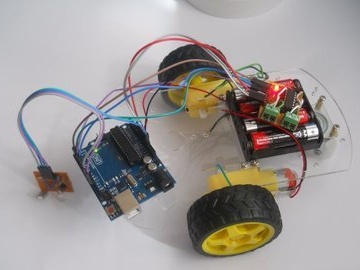
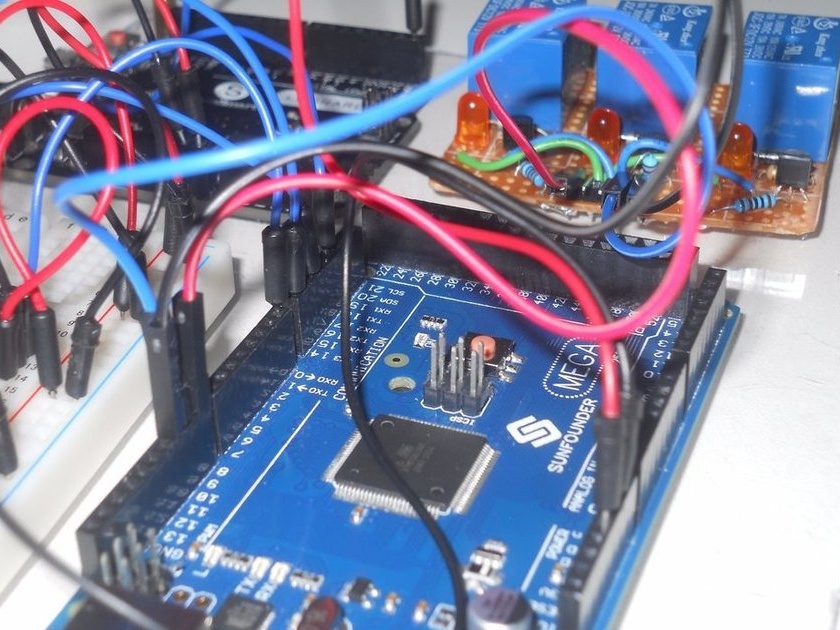
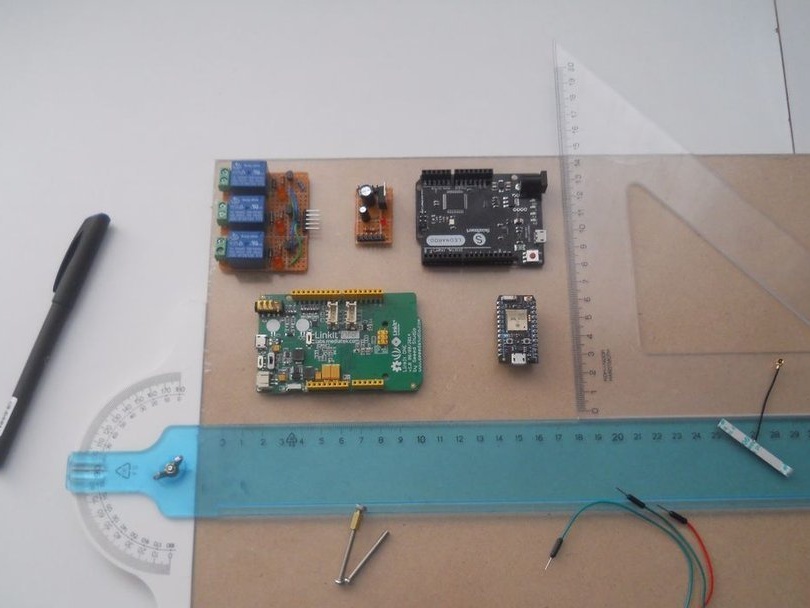
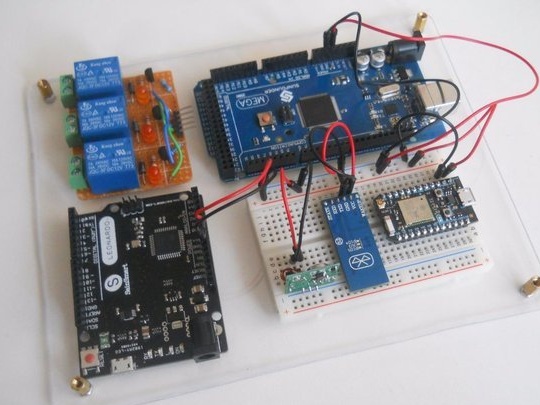
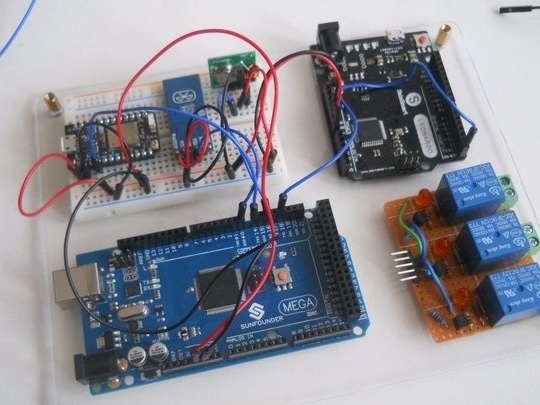
Neljää mikro-ohjainta käytettiin tämän projektin herättämiseen: Työläs Mega, Arduino Leonardo, UNO ja Particle Photon. Mega on projektin aivot, joka vastaanottaa signaaleja kuulokkeista, analysoi ja lähettää komentoja muihin laitteisiin. Lähettää kaikki tiedot Particle Photonille, joka luo web-palvelimen. Leonardo ohjaa hiirtä tietokoneella, ja Unoa käytetään infrapunasignaalien vastaanottamiseen ja robotin ohjaamiseen. Laite pystyy ohjaamaan kolmea eri laitetta (tai enemmän, jos haluat ohjelmoida jotain muuta). Lisäksi näitä kolmea eri laitetta kutsutaan kanaviksi. Laite vaihtaa näiden kanavien välillä, jos suljet silmäsi:
Sulje silmäsi 1-2 sekunniksi: siirry kodin automaatiotoimintoon
Sulje silmäsi 2–4 sekunniksi: siirry robotin ohjaimen tilaan
Sulje silmäsi 1-6 sekunniksi: siirtyy hiiren ohjaustilaan
Kotiautomaation toiminnasta, johon voit kytkeä mitä tahansa: TV, lamput, pistorasiat, kaikki mitä haluat, releet käytettiin
Aivojen aaltojen havaitsemiseen - Necomimi, joka voi liikuttaa korviasi aivojen aaltojen mukaan (huomio, meditaatio). Pienen sirun sisällä, joka lukee aivojen aaltoja, suodattaa melua ja antaa erittäin hyvän signaalin. Se toimii UART (Serial) -rajapinnan kanssa, joten joillakin hakkeroinneilla voimme käyttää Arduinoa lukemaan aivoaaltoja.Tämän HF-laitteen tehtävä on siirtää aivoaaltoja langattomasti keskuspalvelimelle.
Jos olet jo perehtynyt edellinen projektisitten voit ohittaa Necomimin purkamis- ja uusintavaiheen.
Mene alas, kuinka purkaa ja tehdä siitä langaton Bluetooth-kuuloke.
Kodin automaation ohjausjärjestelmä
Jos siirryt kotiautomaatioon, nosta huomiotaso yli 70 käynnistääksesi ensimmäisen releen, nosta meditaatiotasosi yli 70 käynnistääksesi toisen releen ja nosta molemmat arvot yli 70 saadaksesi kolmannen releen päälle. Se on vähän vaikeaa, mutta ei mahdotonta mielen harjoittelun jälkeen. Jos rele on jo päällä, kytke se pois käytöstä samalla komennolla (jos se on päällä, sammuta se 70: llä). Kun järjestelmä on valmis, mikä tahansa korkeajännitelaite (valo, TV, tietokone, tuuletin, kaikki) voidaan kytkeä relemoduuliin.
Hiiren hallinta
Tunnistimet ohjaavat kohdistinta. Jos tarkkailutaso on alle 25, se siirtyy vasemmalle, jos välillä 25-50 siirtyy oikealle, jos välillä 50 ja 75 se nousee ja jos välillä 75 ja 100 laskee. Voit antaa napsautuksen hiiren painikkeella nostamalla meditaation tasoa. Tietysti sinun täytyy harjoitella tätä.
Robotin hallinta
Robotilla on vain kolme eri joukkuetta: pysähdy, käänny vasemmalle ja siirry eteenpäin. Miksi vain kaksi liikevaihtoehtoa? Koska nämä kaksi suuntaa ovat riittävät robotin siirtämiseen mihin tahansa. Käytä meditaatiotasosi kiertääksesi robotin kanssa, ja kun olet saavuttanut haluamasi suunnan, pysäytä robotti ja siirry sitten eteenpäin huomion tasolla. Tämä on paras tapa hallita robottia, ja jopa aloittelijat, jotka eivät pysty hallitsemaan huomio- / meditaatioarvojaan niin hyvin, voivat pelata tällä robotilla.
HF-laite lähettää BT (Bluetooth) -signaaleja Arduino Mega -laitteelle, joka analysoi saapuvat tavut ja hallitsee käyttäjän ajatuksista riippuen erilaisia toimintoja. Aluksi kirjoittaja halusi käyttää Particle Photon -laitetta tiedonsiirtona, mutta tämä pieni moduuli sai roolin web-palvelimen luomisessa. Se oli koko projektin suurin muutos. Hän käytti myös kotitekoisia Arduino-moduuleja, mutta voit ostaa näitä moduuleja verkosta.
Kaikki osat ovat GearBest.com-sivustolta. Tämä on verkkokauppa, sama kuin eBay, mutta varaosat toimitetaan paljon nopeammin (ehkä kaikki tämä on aliexpressissä). Siksi, jos haluat luoda oman peliohjaimen, robotin ohjaimen tai Force Detecto r: n, aloita ostamalla osia.






Tarvittavat työkalut:
juotin
juottaa
liima-ase
tarranauha / kaksipuolinen teippi
vaijerinpoistaja
teräsleikkurit
laitteet:
/ Arduino Nano
ohjelmisto:
Necomimin hakkerointi







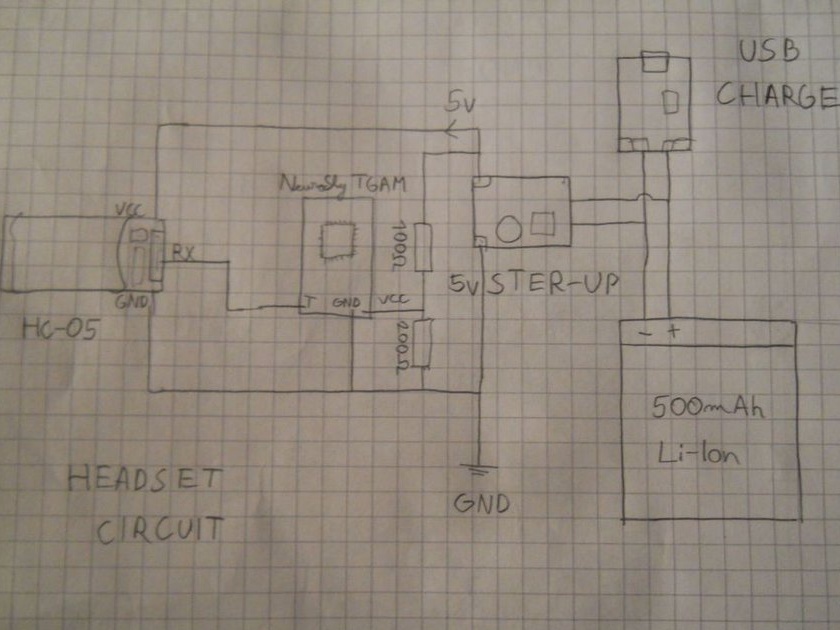
Haluamme muokata tätä EEG-lelua tiedonsiirtoa varten Bluetoothilla, joten ensin puretaan kotelo. Ruuvit ovat tarran alla. Poista tarra ja laitteen takaosa. Löydät sisällä pienet levyt. Emolevyn alla on Neurosky TGAM-siru. Mikrokontrollerin emolevystä on juotettu 4 johtoa siihen, joten ota juotin ja poista tämä piiri varovasti. Juota nyt kolme johtoa GND-nastaan, VCC-nastaan ja T-nastaan. T-nasta on 57600 baudin lähettimen lähtö, joka lähettää datapaketit mikro-ohjaimeemme. Kun olet juottanut kolme johtoa yllä, voit rakentaa oman ladattavan virtalähteen. Kirjailija käyttää 500 mAh: n litium-ioniakkua, USB-laturipiiriä, 5 V: n lisäyspiiriä ja kahta vastuksia (100 ohmia ja 200 ohmia) erillisen 3,4 V: n virtalähteen tarjoamiseksi sirulle ja Bluetooth-moduulille. Kuvassa kytkentäkaavio.
Jos piiri on valmis, määritä Bluetooth-moduuli.
Noudata alla olevia ohjeita ja kuvia ja luo omat langattomat EEG-kuulokkeet.
Tärkein osa on kytkeä “T” -tappi Bluetooth-moduulin “RX” -kohtaan.



HC-06: Lataa ensin luonnos nimeltä “HC_06_Bluetooth” Arduino UNO: hon, kytke sitten Bluetooth-moduuli kuvan osoittamalla tavalla.
// HC-06-Bluetooth
void setup () {
// Käynnistä laitteisto sarja.
Serial.begin (9600); // oletus HC-06 baudinopeus
viive (1000);
Sarjajälki ("AT");
viive (1000);
Serial.print ("AT + VERSION");
viive (1000);
Serial.print ("AT + PIN"); // salasanan poistamiseksi
viive (1000);
Sarjajälki ("AT + BAUD7"); // Aseta tiedonsiirtonopeus arvoon 576000 - esim. Necomimi-oletus
viive (1000);
Serial.begin (57600); //
viive (1000);
}
tyhjä silmukka () {
}Avaa sarjanäyttö Arduino IDE: ssä ja odota, kunnes Arduino määrittää BT-moduulin. Bluetooth-moduulin asetukseksi on nyt 57600 baudia. Voit kokeilla monia BCI (Brain Computer Interface) -sovelluksia, koska tämä hakkeroitu Necomimi -lelu on yhteensopiva kaikkien Neurosky-sovellusten kanssa.
Voit käyttää näitä sovelluksia oppiaksesi hallitsemaan aivojen aaltoja.
HC-05: Käytä sitten ”HC_05_Bluetooth” ja lataa Arduino-laitteesi samalla tavalla kuin ennen.
// HC-06-Bluetooth
tyhjä asennus () {
// Käynnistä laitteisto sarja.
Serial.begin (9600); // oletus HC-05-tiedonsiirtonopeus
viive (1000);
Sarjajälki ("AT");
viive (1000);
Serial.print ("AT + VERSION");
viive (1000);
Serial.println ("AT + ROLE = 1"); // aseta HC-05 master-tilaan
viive (1000);
Serial.println ("AT + LINK =" Lisää osoitteesi tähän "); // nyt moduulin pitäisi yhdistyä automaattisesti
viive (1000);
Sarjajälki ("AT + UART = 57600,1,0"); // Aseta tiedonsiirtonopeus arvoon 576000
Serial.begin (57600); //
viive (1000);
}
tyhjä silmukka () {}
Liitä HC-05: n "EN" -tappi 3v3 Arduino -laitteeseen. Sinun on kirjoitettava HC-06-moduulin osoite koodina. Tarkista BT-moduulin osoite Android-älypuhelimellasi. Korvaa ":" (kaksinkertaiset pisteet) koodilla pilkulla ",".
Ja sinun on muutettava osoite koodissa: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Näin ollen HC-05-moduuli voi tunnistaa osoitteen.
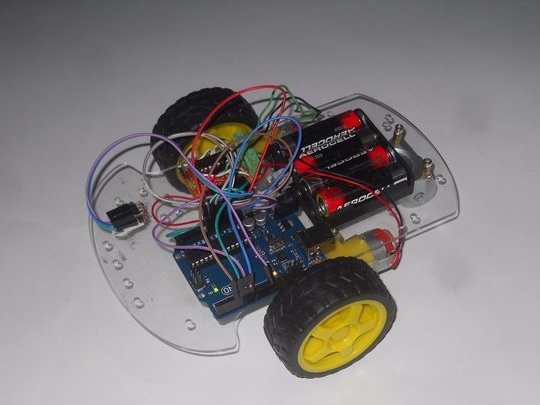
Kaukosäädin
Tämän edullisen robotin luomiseen käytettiin 38 kHz: n infrapuna-anturia, jota käytetään television kaukosäätimissä.
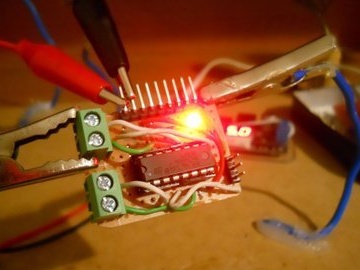
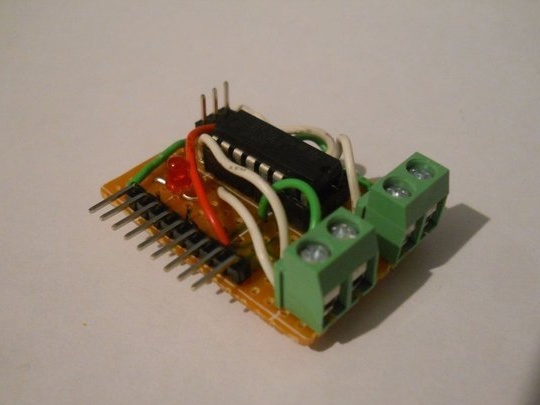
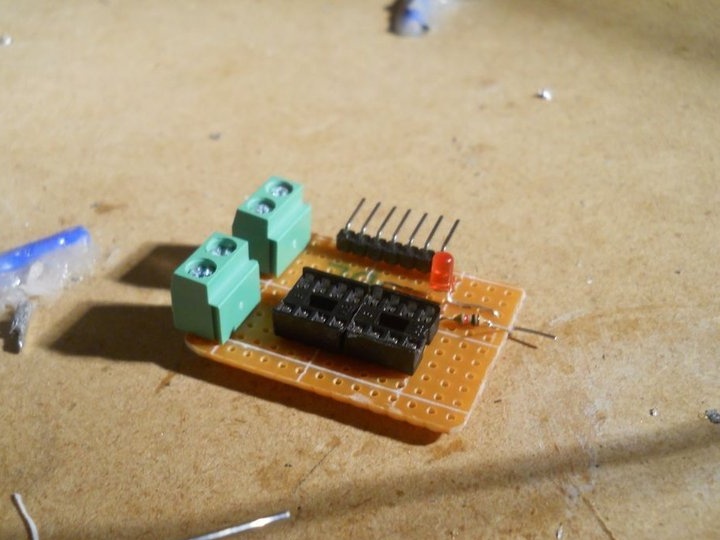
Moottorinkuljettaja
Moottorikäyttökaavio - Tarvitset seuraavat yksityiskohdat:
2 ruuviliittimet
L293D IC3
Otsikkotappi (90 astetta)
1k vastus
Punainen LED
johdin
Piirilevy
Kytke mikropiirin tapit liitintappeihin käyttämällä useita kuparilankoja ja seuraa kaaviota. Sillä ei ole merkitystä, mihin mikropiirin osaan liittimen napaan tulee, muista vain mihin liitit ne. LED on kytketty sarjaan vastuksen kanssa ja samanaikaisesti 5 V VCC: n kanssa.
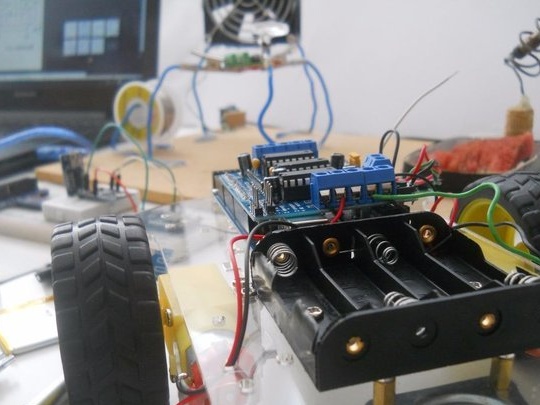
alustan kokoonpano
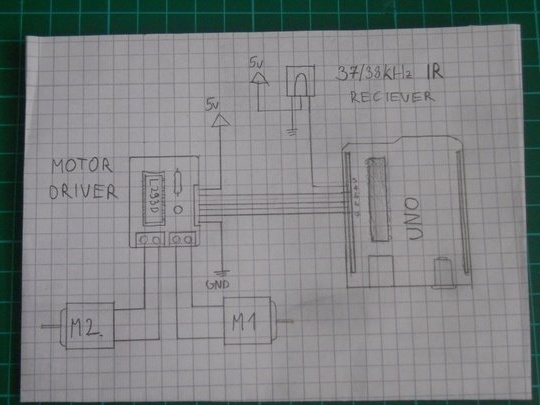
Sähkömoottoriohjaimena käytetään L293D-sirua, joka voi ohjata kahta moottoria. Katso kaavio rakentaaksesi kaavion.
Kytke osat Arduinoon
Arduino Pin == & gt; moottorinkuljettaja
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Joten katsokaa L293D-moduulin kytkentäkaaviota ja kytke sen sitten koskettimet Arduino UNO: hon, kuten yllä on kuvattu. Tappi 5v Arduino on kytkettävä napoihin 1, 9, 16, jotta sirun moottorin ohjaustoiminto aktivoituu. Käynnistä sitten moottorit virta ruuviliittimillä.
Kirjasto käyttää IRremote-koodia, joka lukee 38 kHz: n infrapunasignaalit, dekoodaa ne ja siirtää sitten robotin. (Lataa kirjasto "ohjelmisto" -osiosta).
Koodissa on kommentteja, mutta lopputulos on, että se dekoodaa pääpalvelimelta tulevat infrapunasignaalit, sitten käynnistää moottorit, käyttäjän halutun mukaan, minkä jälkeen robotti siirtyy eteenpäin tai kääntyy vasemmalle. Lataa koodi: "Robot_Code". Lataa tämä Arduinoon ja robotti on valmis.
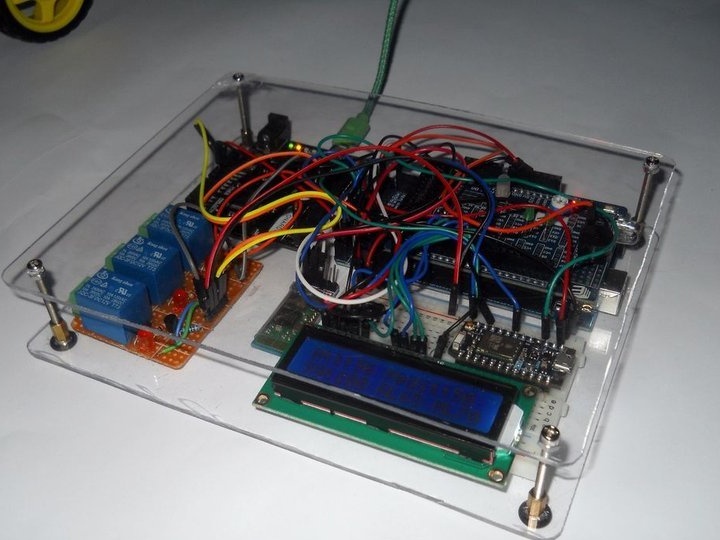
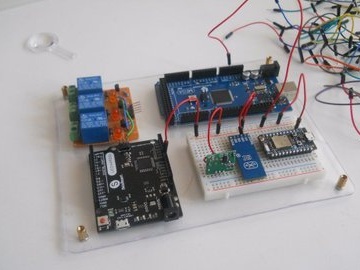
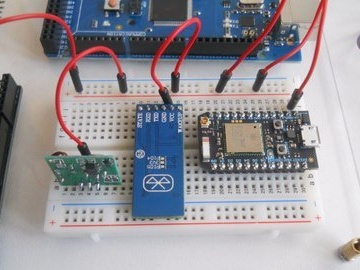
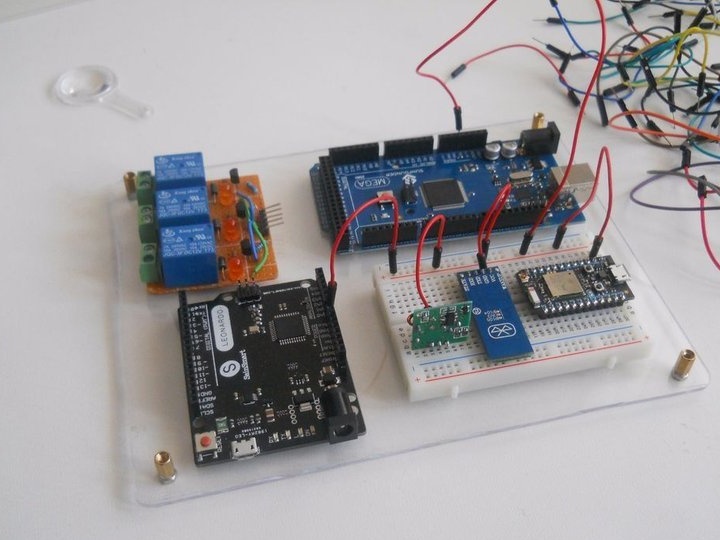
Pääpalvelin (Arduino Mega, Leonardo, Photon)




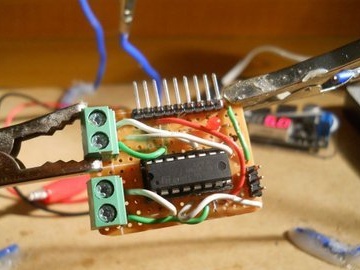
Palvelin lukee saapuvat datapaketit langattomasta kuulokkeesta. Käytämme määritettyä BT-moduulia viestinnän tarjoamiseen HF: n ja palvelimen välillä. Arduino Mega on koko piirin aivot, kaikki on kytketty tähän mikro-ohjaimeen: Bluetooth, infrapuna-lähettimen LED, web-palvelin ja hiiren ohjain. Koodi on vähän monimutkainen, mutta yleensä siinä on kommentteja ymmärrettäväksi.
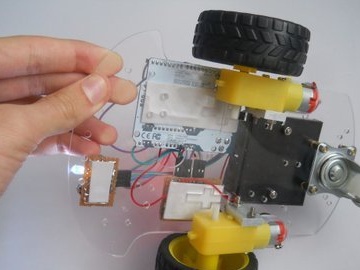
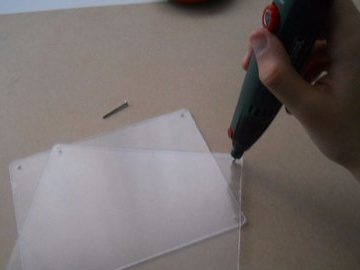
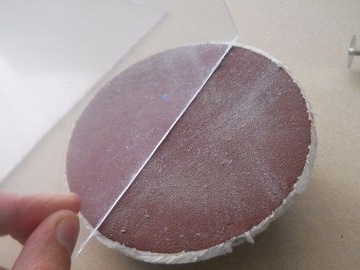
kotelo
Kaikki on yksinkertaista. Kaksi 18x15 cm pleksilasilevyä, tasoita reunat hiekkapaperilla. Useita ruuveja niiden liittämiseksi toisiinsa.
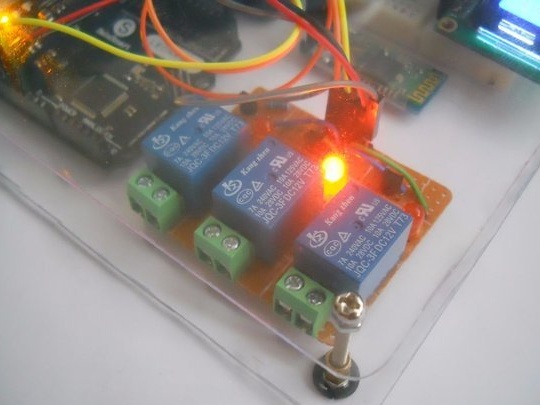
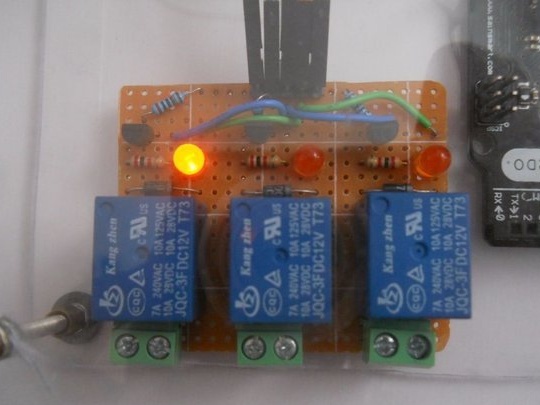
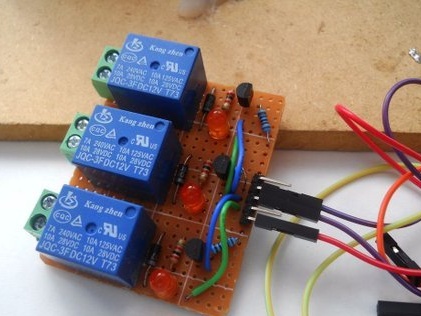
Relelauta
Tarvitset seuraavat tiedot:
2n2222-transistori (3 kpl)
germaniumdiodit (3 kpl)
330 ohmin vastukset (3 kpl)
1 kOhm vastukset (3 kpl)
Rele 5 V (3 kpl)
nastaliittimet
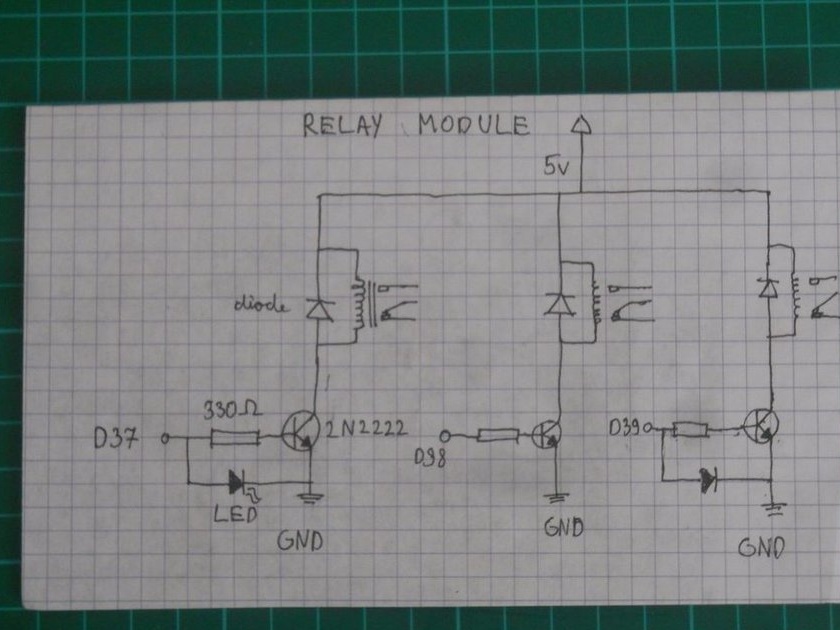
Piirilevy
Kuva on yli tuhannen sanan arvoinen, joten katso kaaviota osien kytkemiseksi piirilevylle.
Jos “Signal” -lähtö on Arduinolta, rele kytkeytyy päälle. Transistori vahvistaa signaalia riittävän tehon tarjoamiseksi releelle. Käytämme 37-38-39-koskettimia kunkin releen HIGH LOW -tasojen ohjaamiseen.
Asentaaksesi osia pleksilasilaatikkoon, tekijä käytti kaksipuolista teippiä. Hän hallitsee melko paljon yksityiskohtia.
Tämä on ohjelmistopalvelin, joten piirin tekeminen ei ole niin vaikeaa. Sinun on vain kytkettävä mikrokontrollerit päälle ja luotava yhteys niiden välille. IR-LED on kytketty napaan D3 ja rele kytketty liittimeen 37-38-39. D16 Arduino Mega menee RX Photoniin ja D18 RX Leonardoon.
Robottiyhteys
[2,02 kt] (lataukset: 14)
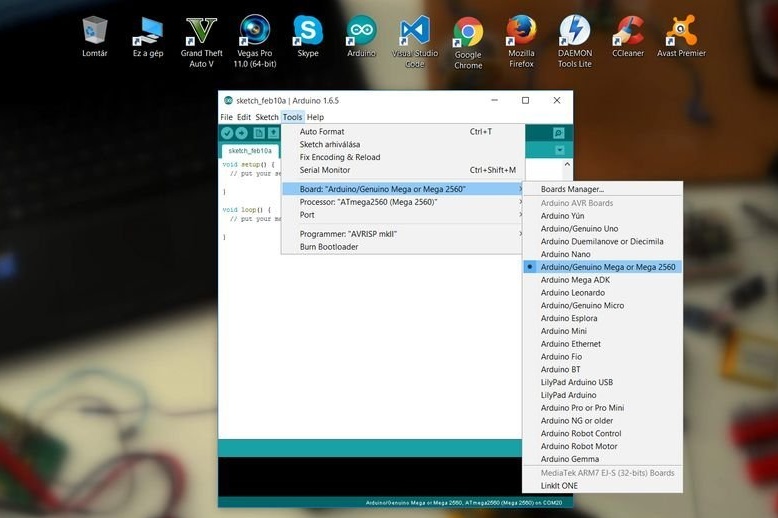
Mutta nyt koodi on valmis ja toimii, joten joudut vain lataamaan mikro-ohjaimet. Lataa .ino-tiedosto tai kopioi / liitä koodi IDE: hen ja käytä sitä. Particle Photon -koodi on ladattava selaimen IDE: n kautta. Voit tehdä tämän rekisteröimällä osoitteeseen. Yhdistä kannettava tietokone mikro-ohjaimeen. Kaikki tapahtuu melkein automaattisesti, lisää vain laitteen tunnus.
Ennen kuin lataat koodeja, varmista, että mitään ei ole kytketty RX / TX-nastaihin. Joten irrota Bluetooth-moduuli Megasta ja irrota Mega Leonardo- ja Photon-laitteista.
[489 b] (lataukset: 15)

Web-palvelinLisätäkseen Internet-esineiden (Internet of Things) -toiminnon projektiinsa kirjoittaja teki online-tiedonkeruulaitteen Particle Photon -sovelluksen avulla. Sen mukaan, mitä teet laitteella, Photon luo henkilökohtaisen palvelimen ja kirjoittaa tietoja pilveen.Tämä voi aluksi tuntua pelottavalta, mutta kuvittele, että voit selvittää, onko sinulla stressiä (huomion tasot kasvavat ja vähenevät nopeasti) vai onko syytä mennä nukkumaan
(meditaatiotaso on aina yli 80)
. Tämän web-palvelimen avulla voit elää terveellisemmin.
Selaimen koodaus
Partikkelilla on myös online-paneeli, jossa voit julkaista mitä tahansa tietoja käyttämällä Particle.publish (); syntaksin. Työkalupalkin kehittäjät ovat säästäneet käyttäjille paljon aikaa.
