




Tässä kotitekoinen tuote Kirjoittaja ehdottaa pienois sorvin luomista yleisesti saatavilla olevilla laitteilla ja työkaluilla. Koneen moottoriksi ehdotetaan vanhan pesukoneen tasavirtamoottoria. Tarvitset myös muutama akryylilevy ja joukko alumiiniputkia.
Aloitetaan ...
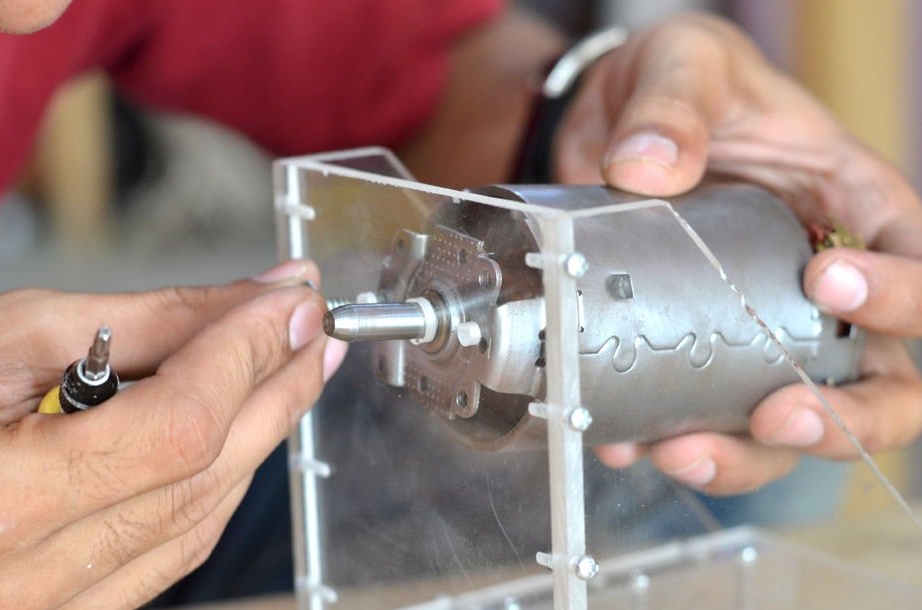
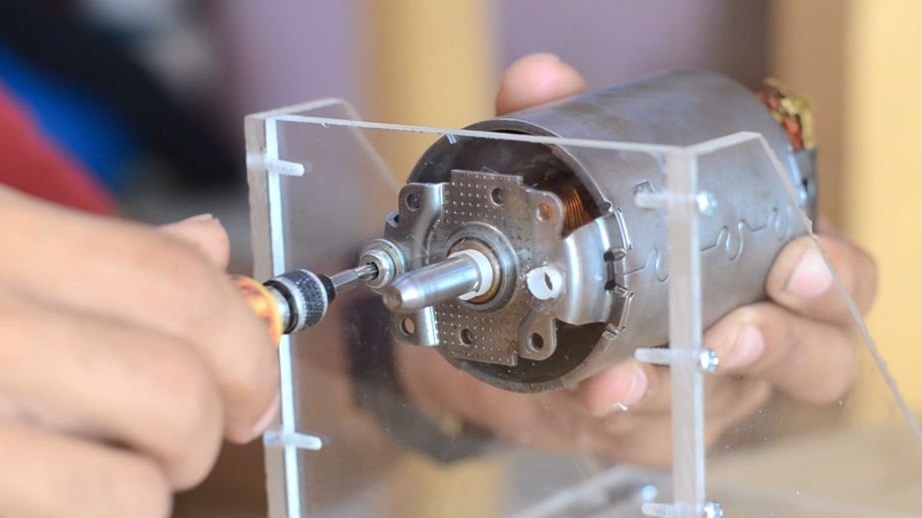
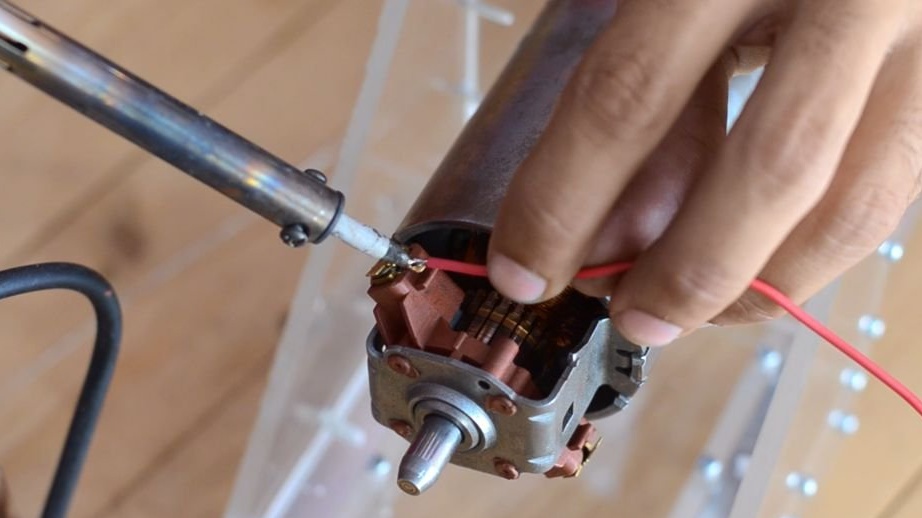
Vaihe 1: Poista moottori
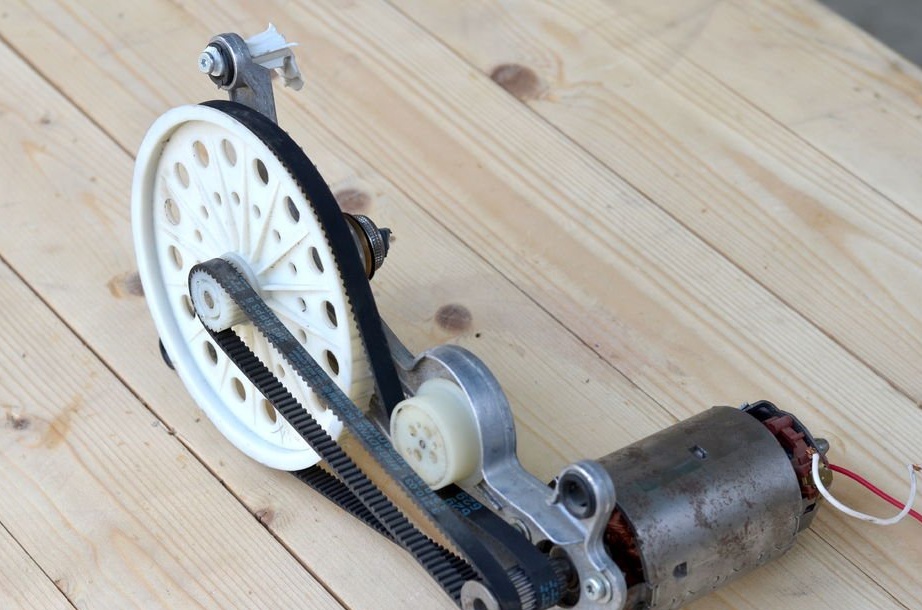

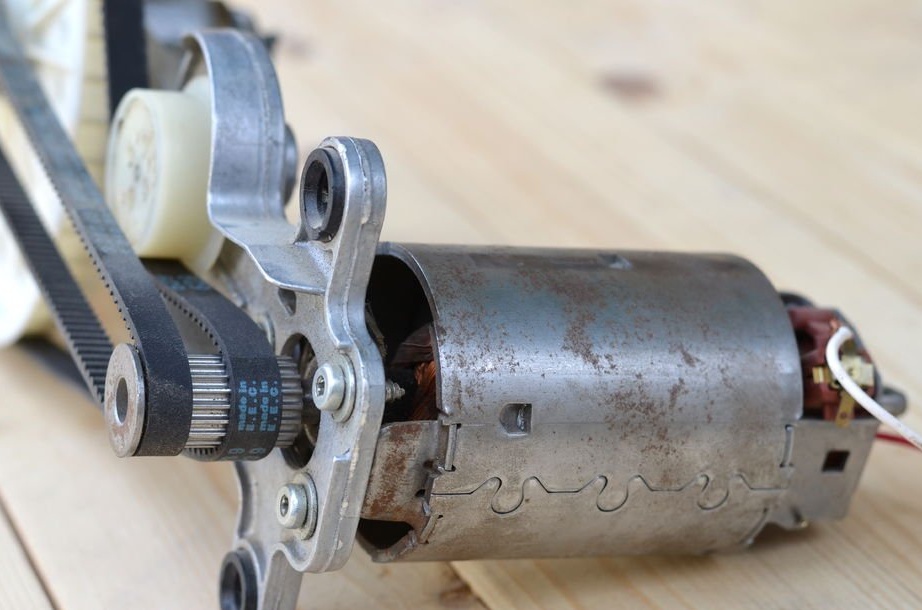
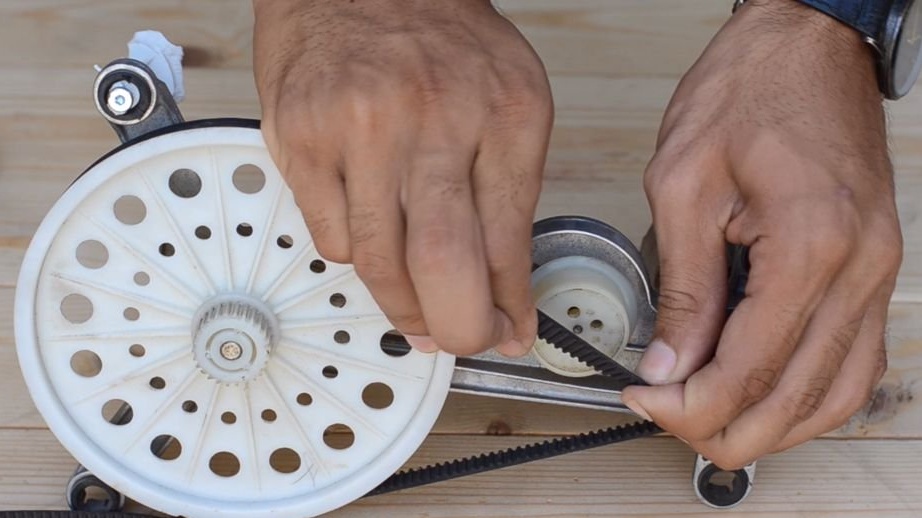
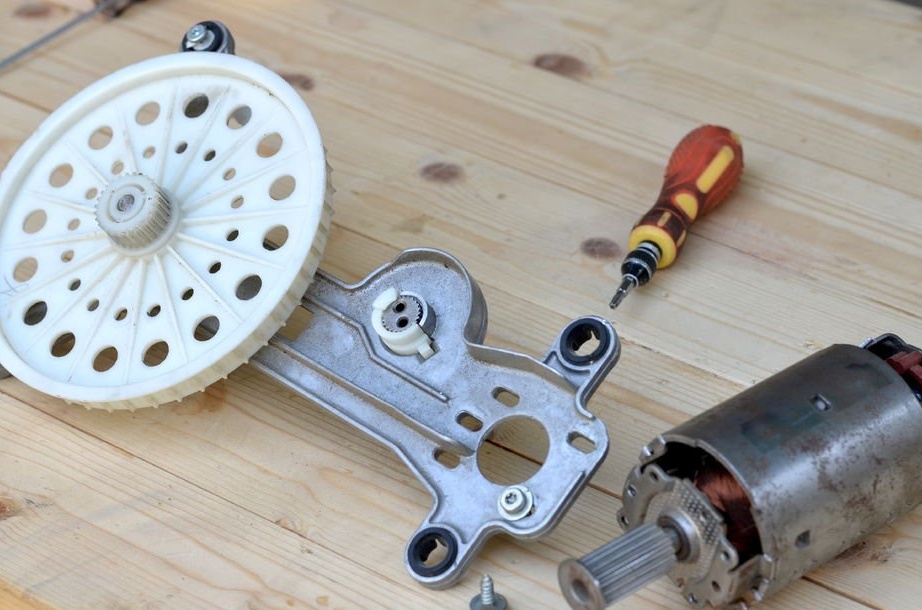
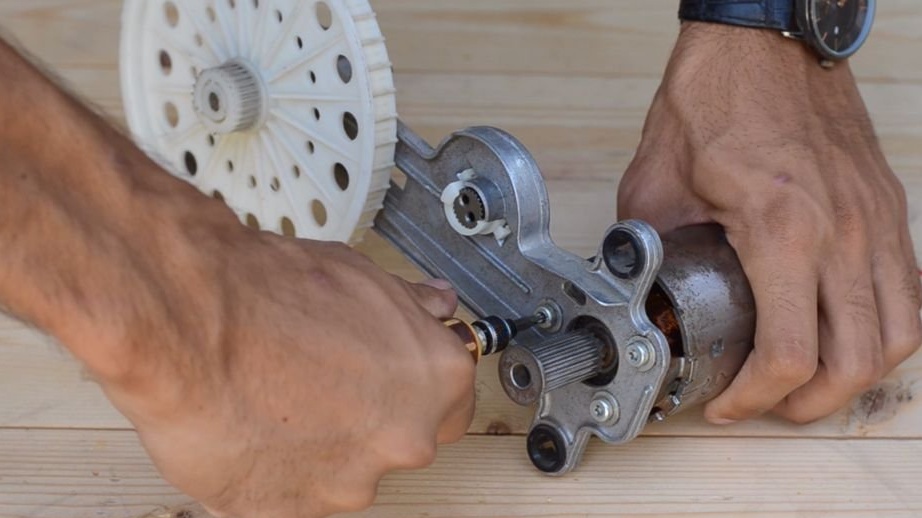


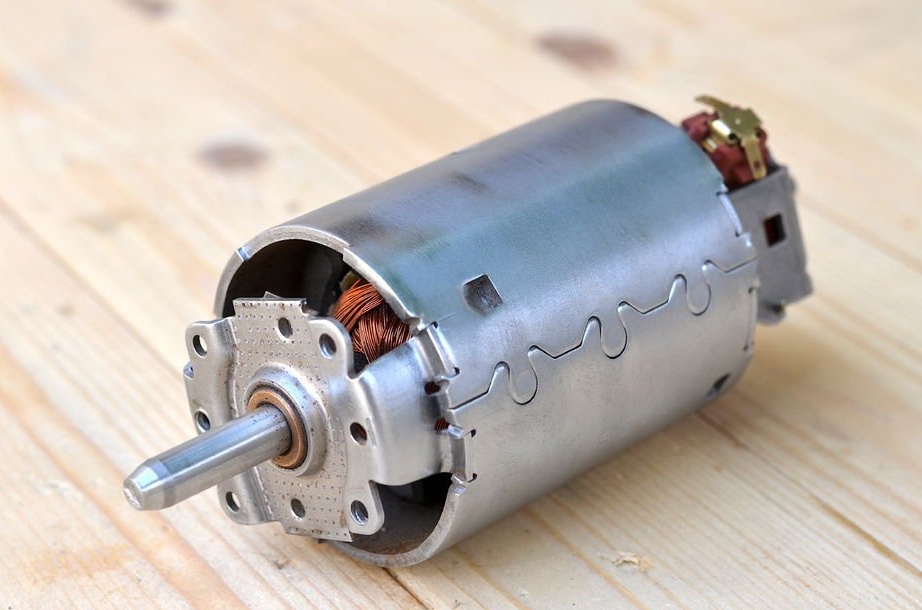
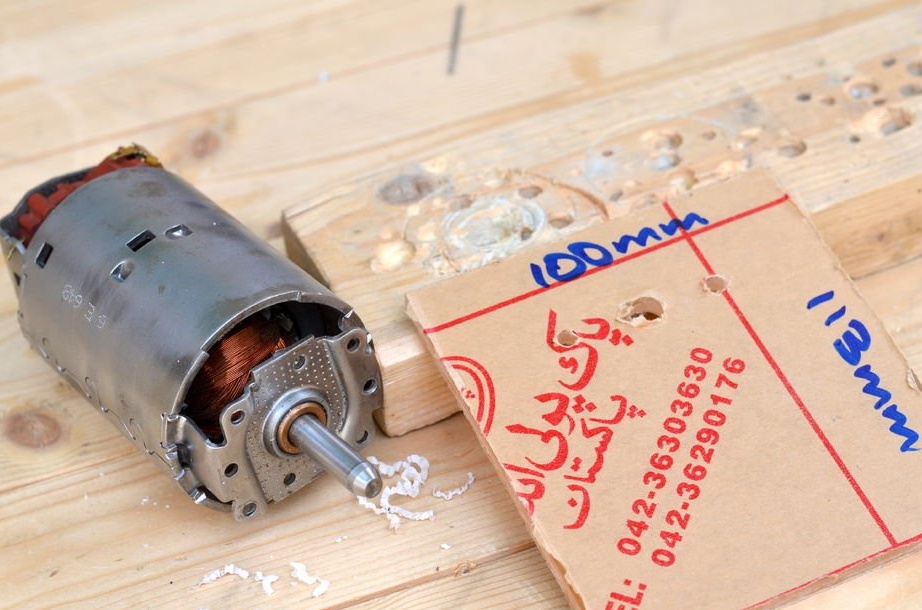
Aluksi poistamme kiinnittimet vanhasta tasavirtamoottorista. Tämä moottori tuottaa hyvän vääntömomentin. Tämä on testattu 42 voltin tasavirtasovittimella. Moottori käy hiljaa, joten poistamme moottorin kokoonpanosta ja poistamme hihnapyörän ja poistamme sitten ruosteen moottorin kotelosta pöytäjauhatimella.
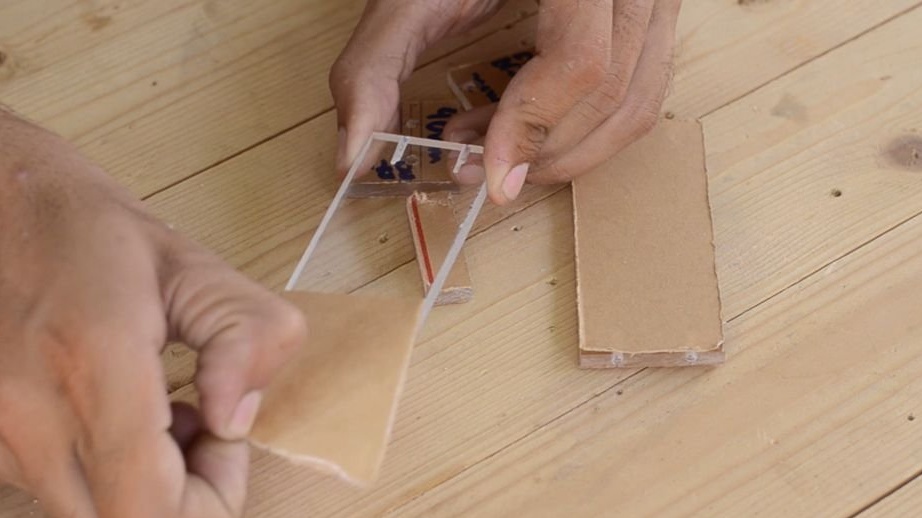
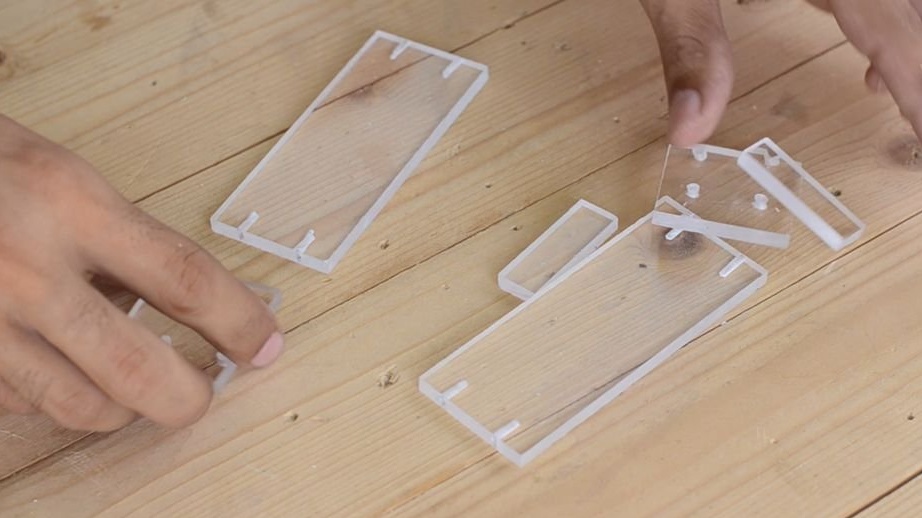
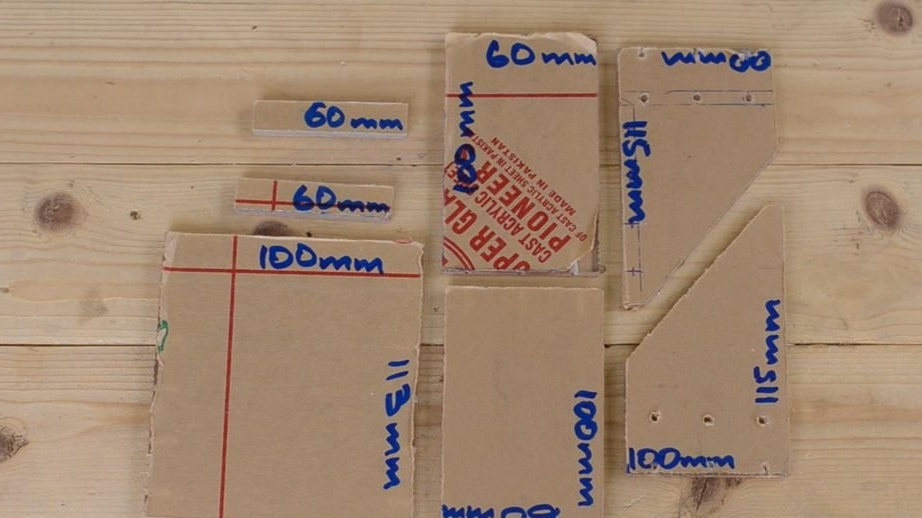
Vaihe 2: Kone-elementtien valmistaminen








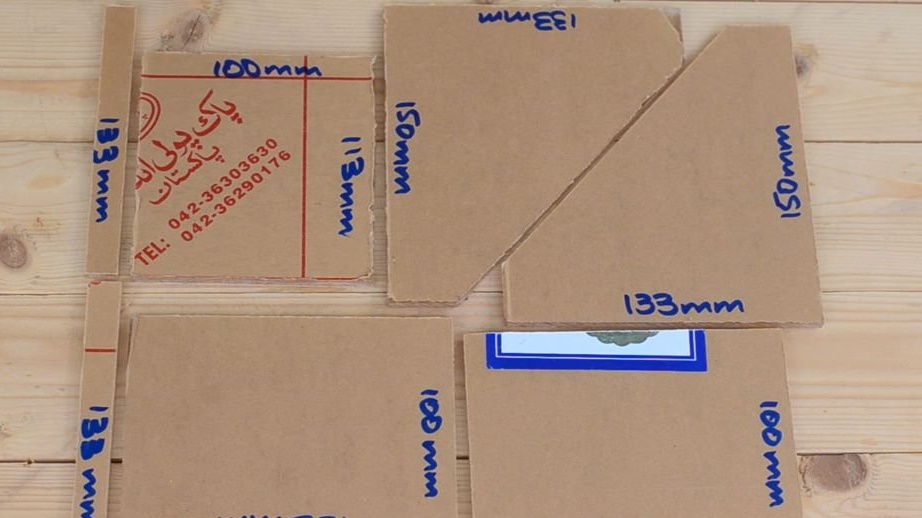

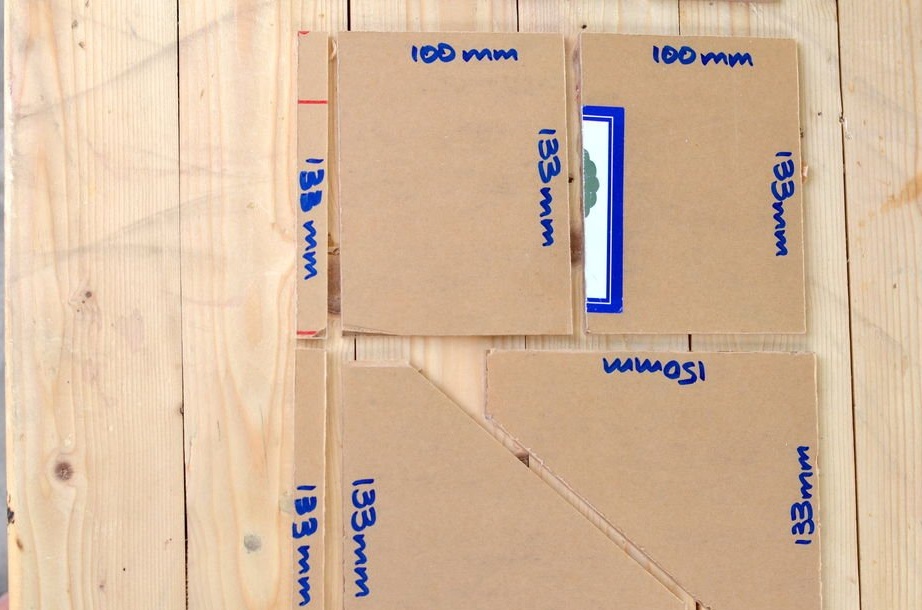
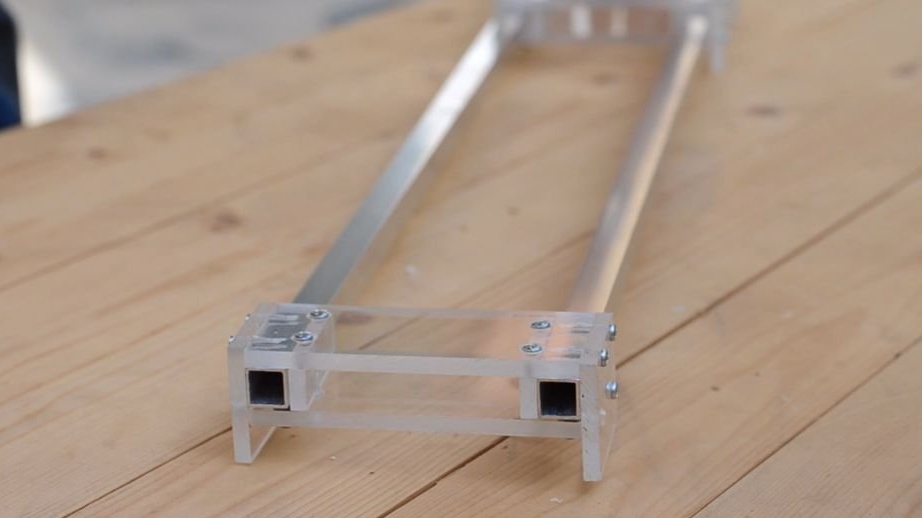
Sorvin ohjauskiskot on valmistettu neliömäisestä alumiiniputkesta, jonka leveys on 12 mm ja pituus 60 cm. Tämän sorvin kaikki rungon osat on valmistettu 6 mm paksusta pleksilasilevystä. Kaikki osat leikataan hihnasahalla ja kotitekoisella pöytäsahalla.
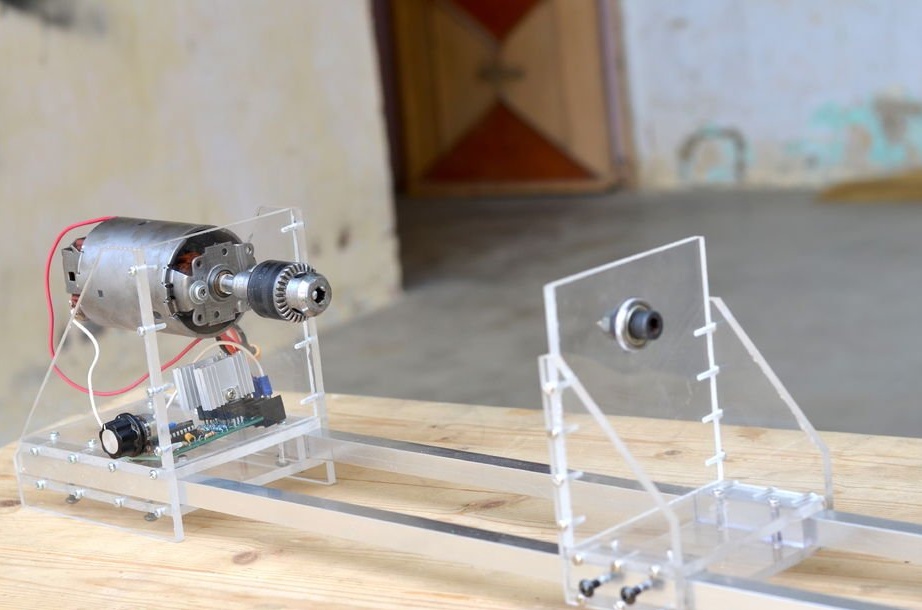
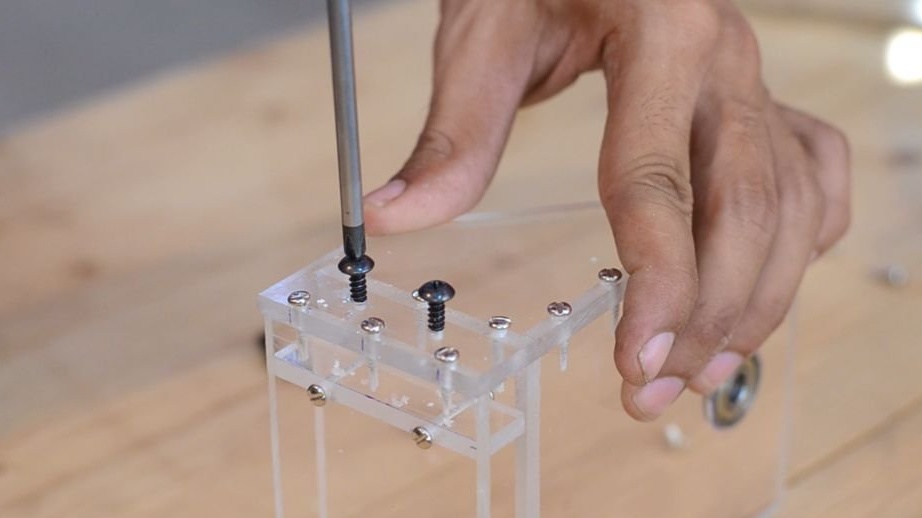
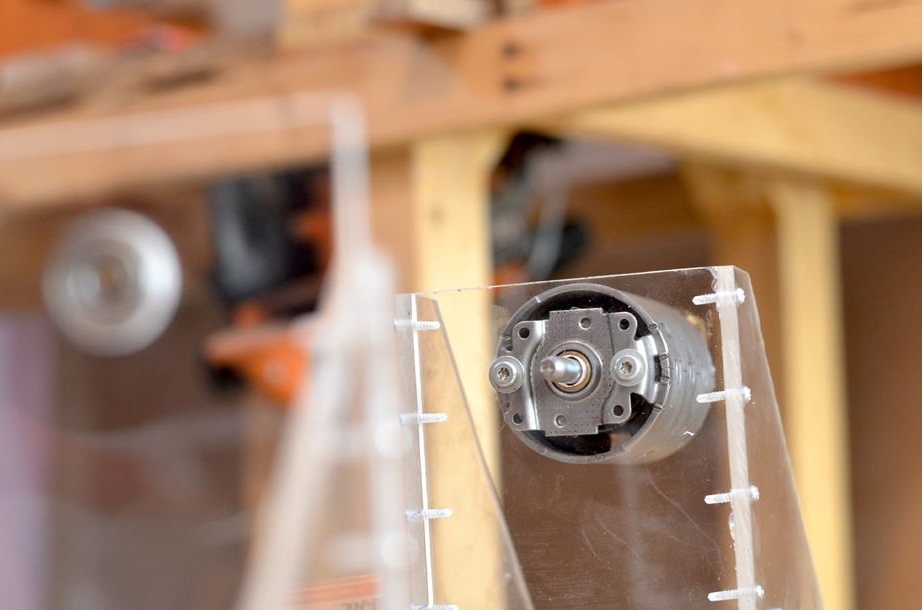
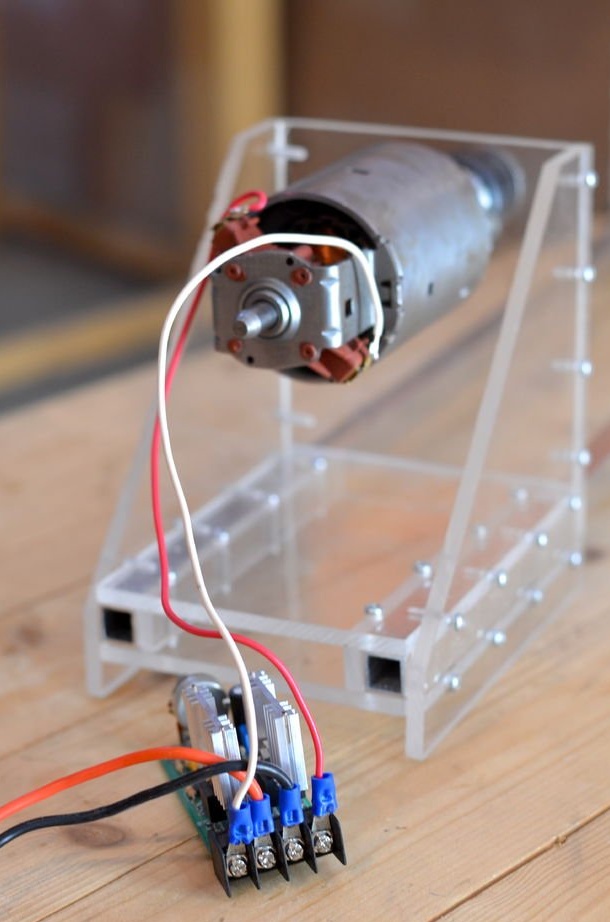
Vaihe 3: Moottorin kiinnityksen kokoaminen





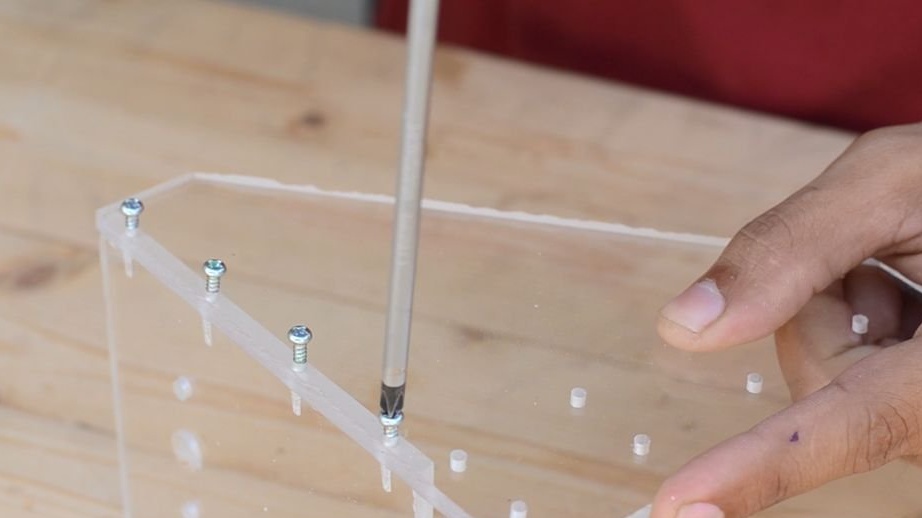
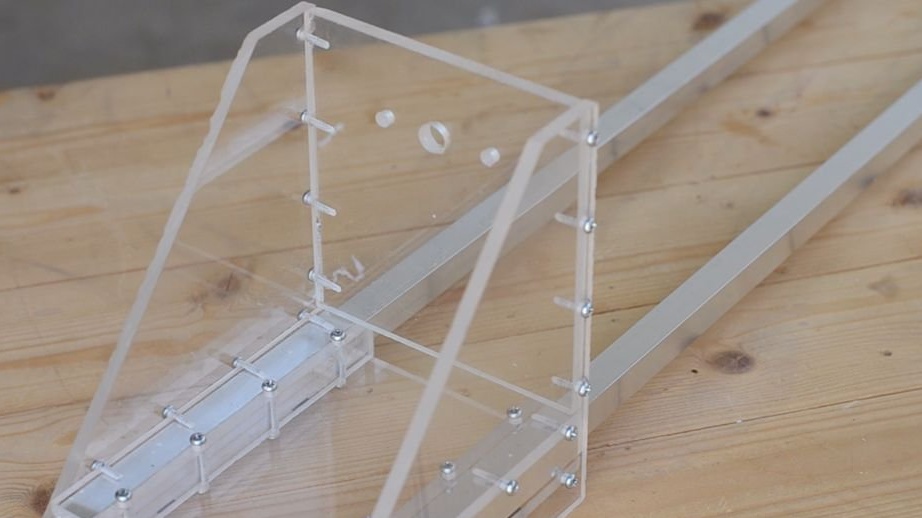
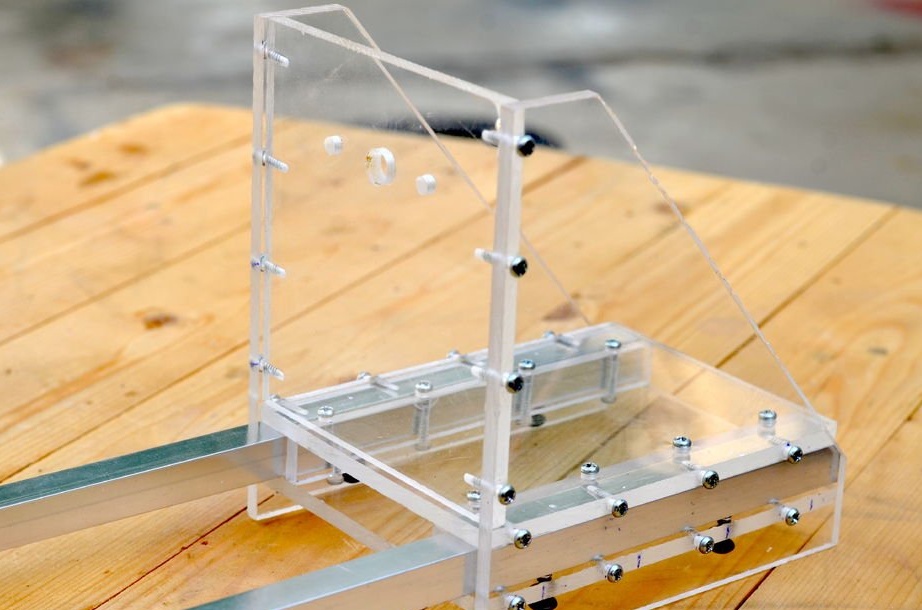
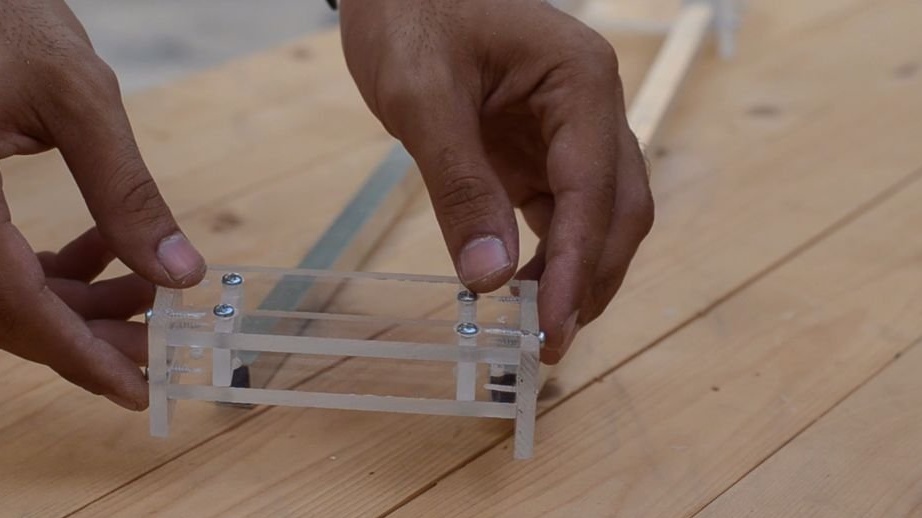
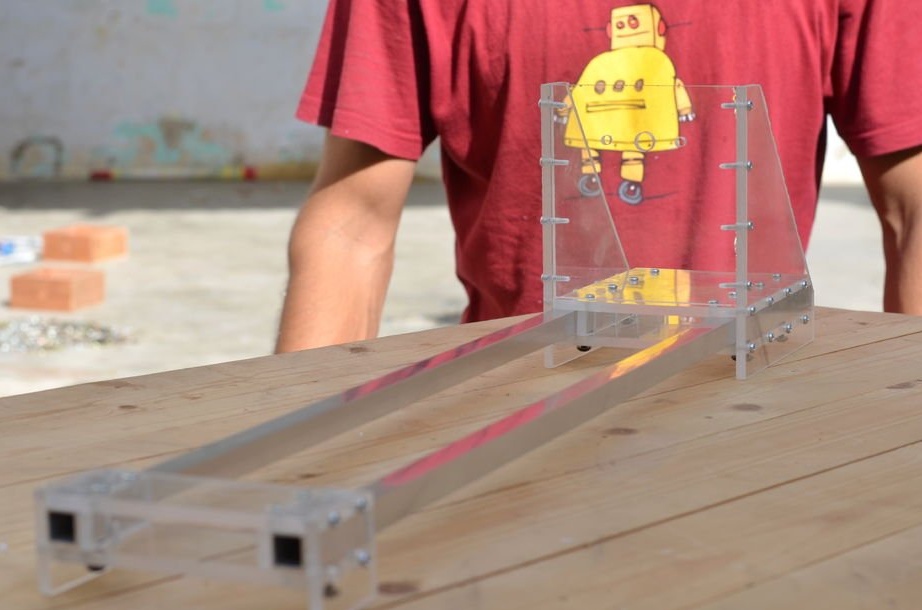
Kun moottori on leikattu pois kaikki rakentamiseen tarvittavat osat, moottori kiinnitetään. Koko rakenteen tekemiseksi mahdollisimman vahvaksi kokoonpanoon käytetään kierreruuvia liiman sijasta. Poraa reikät kumpaankin osaan ja liitä se 60 mm pitkällä ruuvilla.
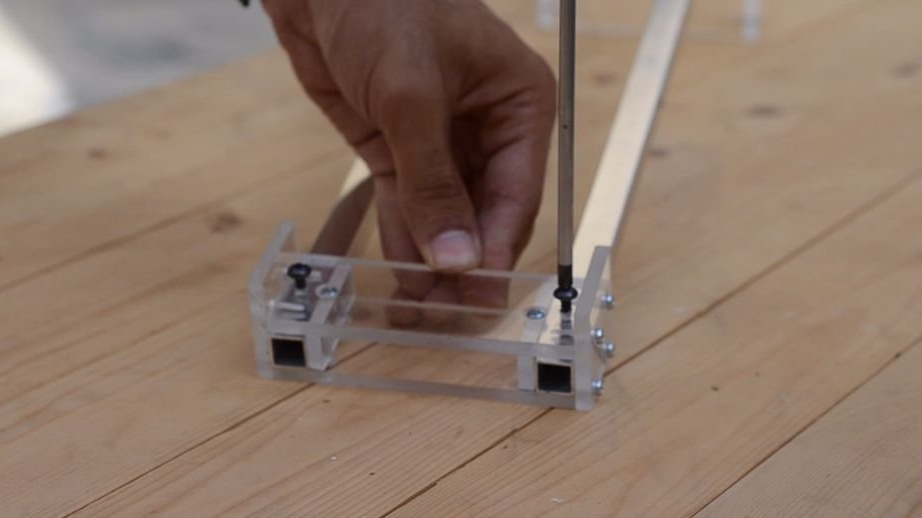
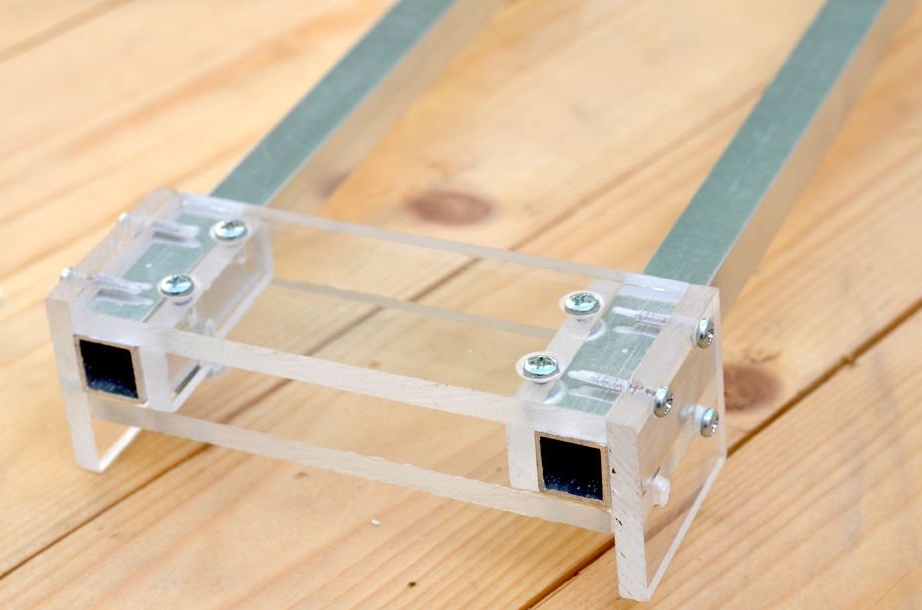
Moottorin asennuksen liukumisen estämiseksi alumiinikiskoja pitkin levyn pohjaan lisättiin neljä kierteitettävää ruuvia, jotka kiinnitettiin kiskoihin kiristettäessä.
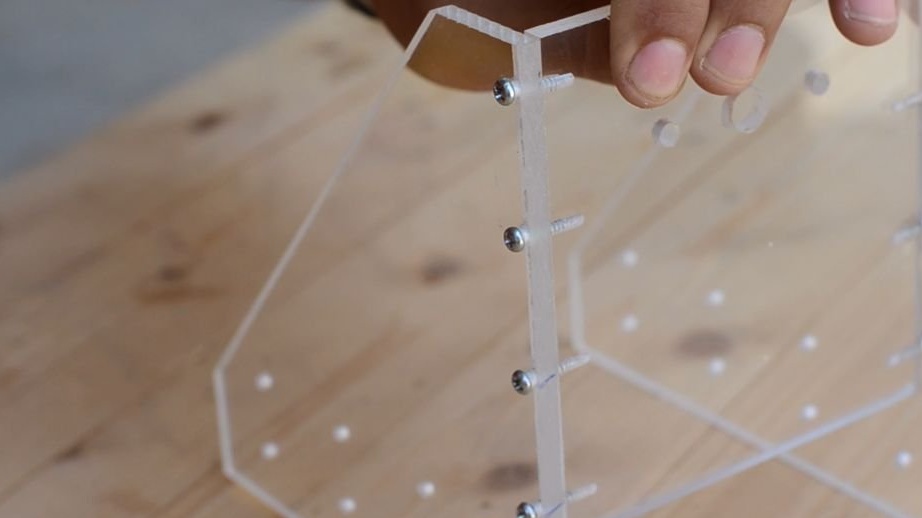
Samaa lähestymistapaa käytetään toisen osan valmistukseen.
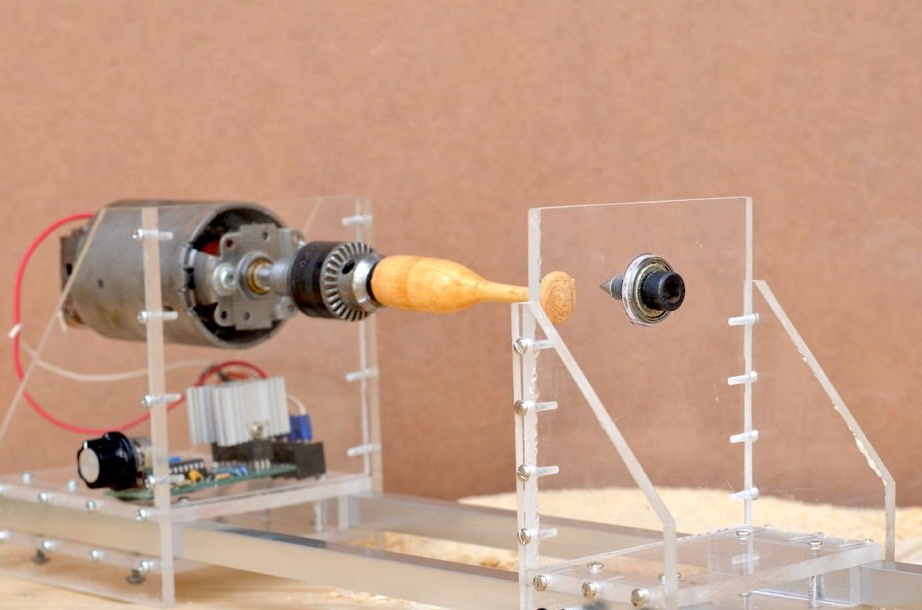
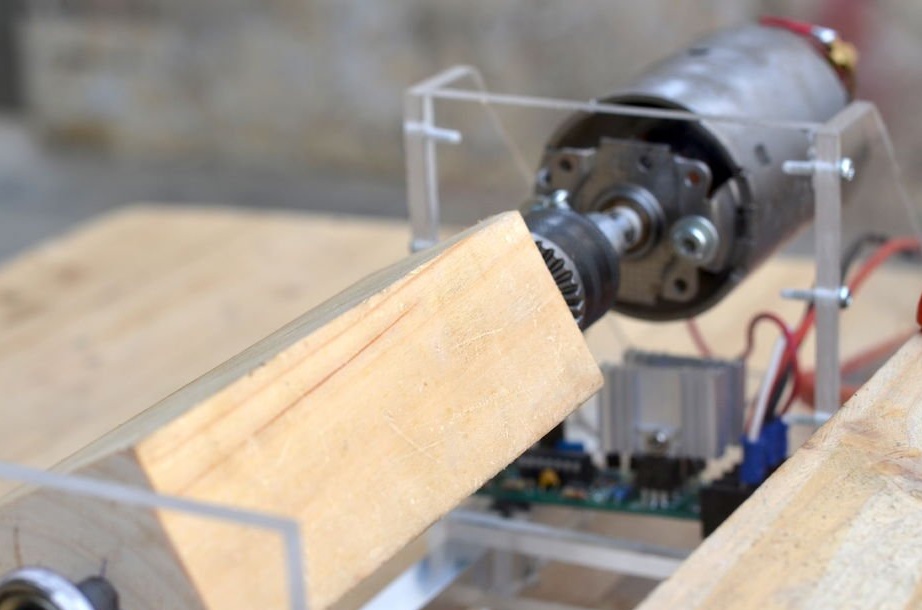
Vaihe 4: Kiinnitä poraistukki
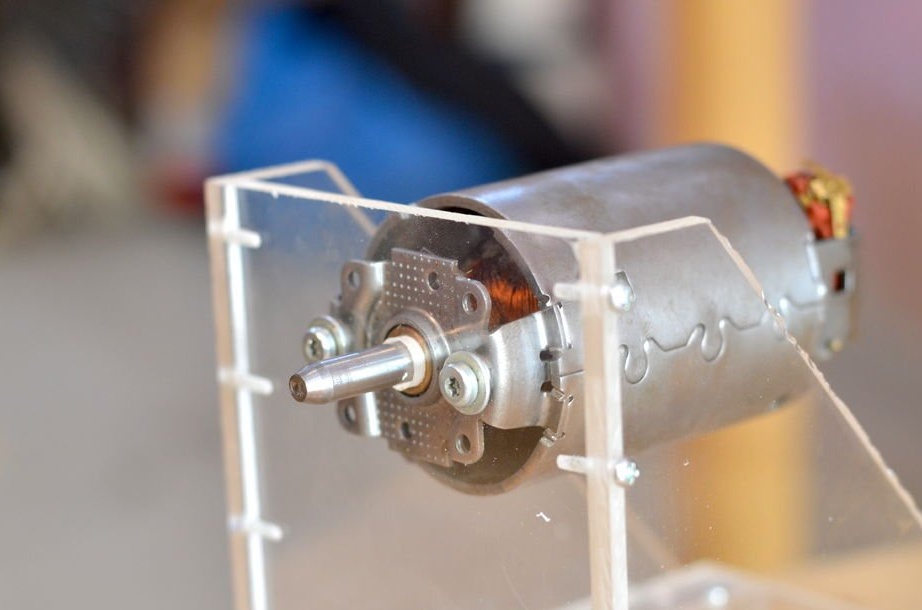

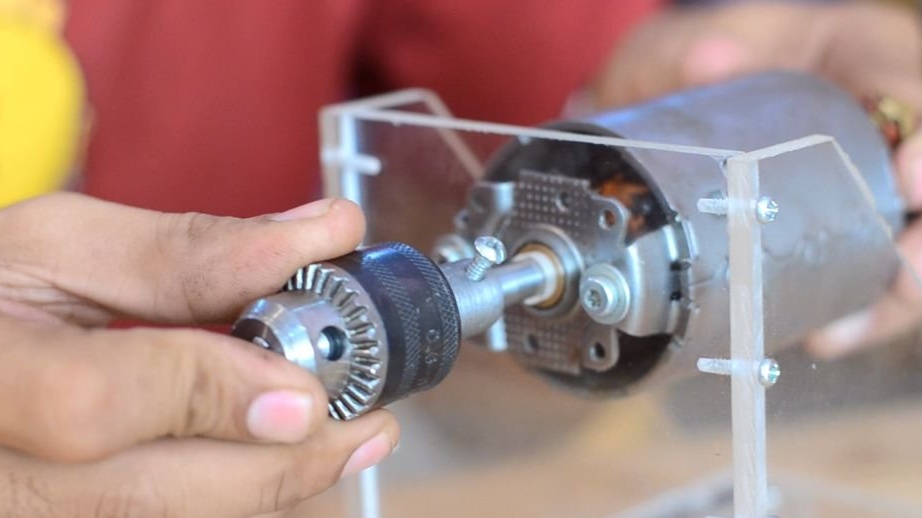
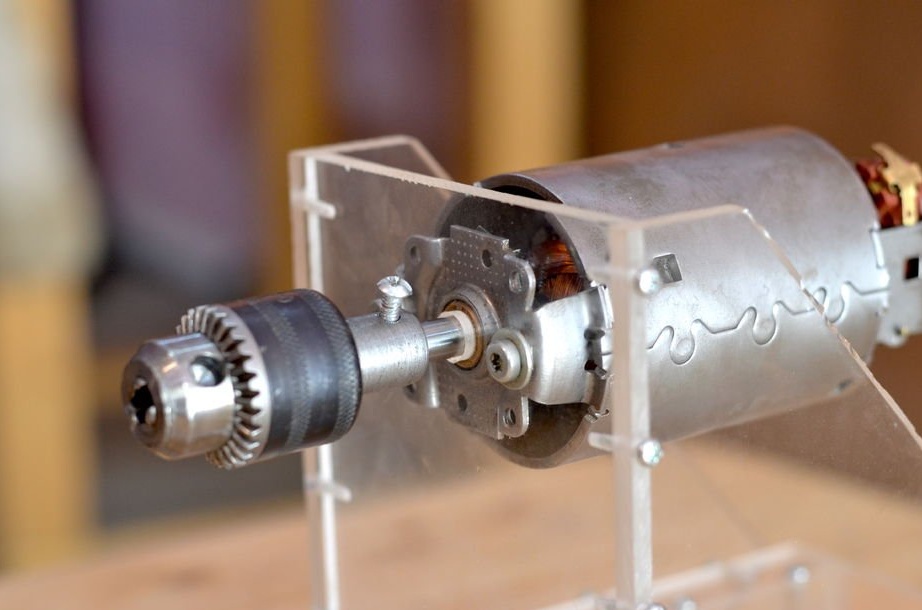
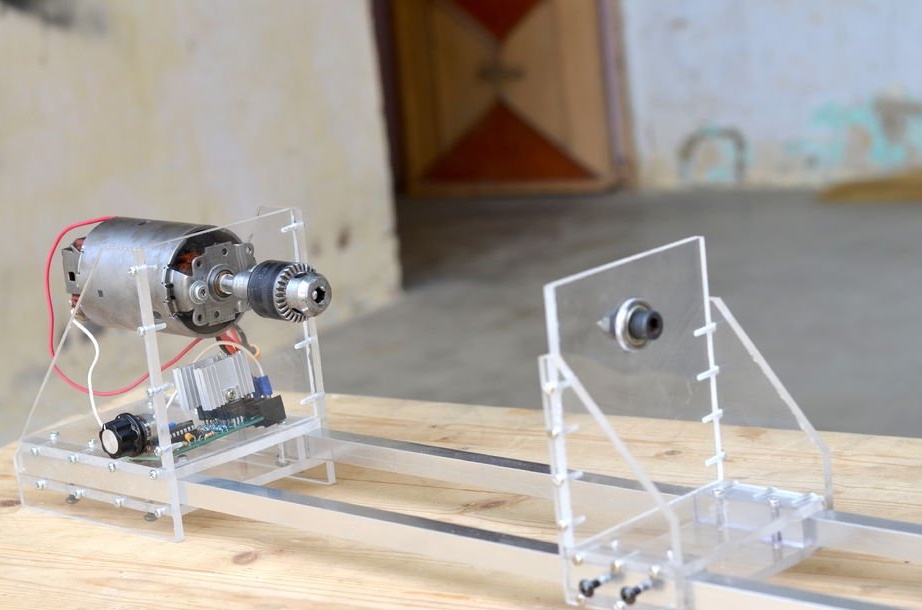
Rakenteen valmistuksen jälkeen moottori asennetaan kahdella 5 mm: n kierreruuvilla. Moottorin akseliin on kiinnitetty 6 mm: n poraistukki, joka kiinnittää pyörivän osan.
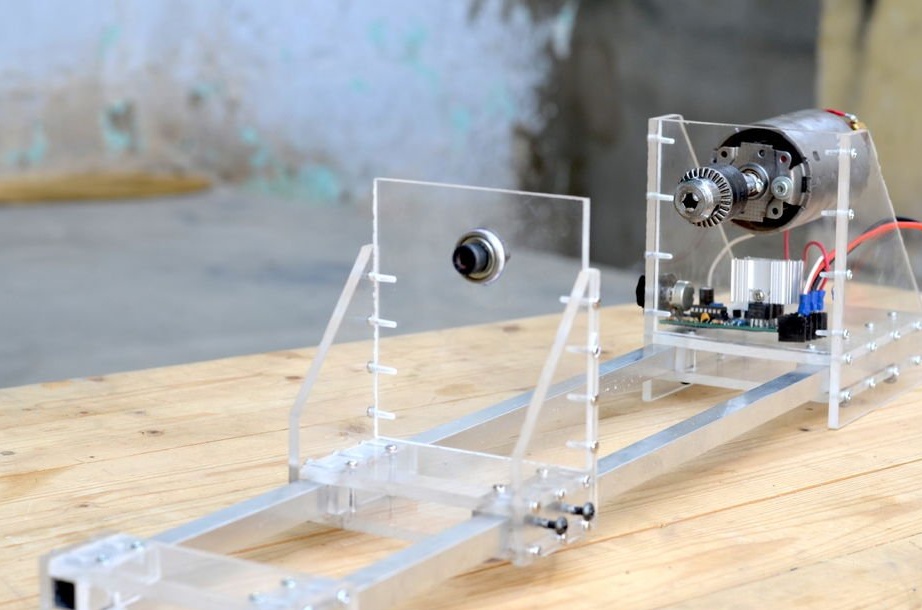
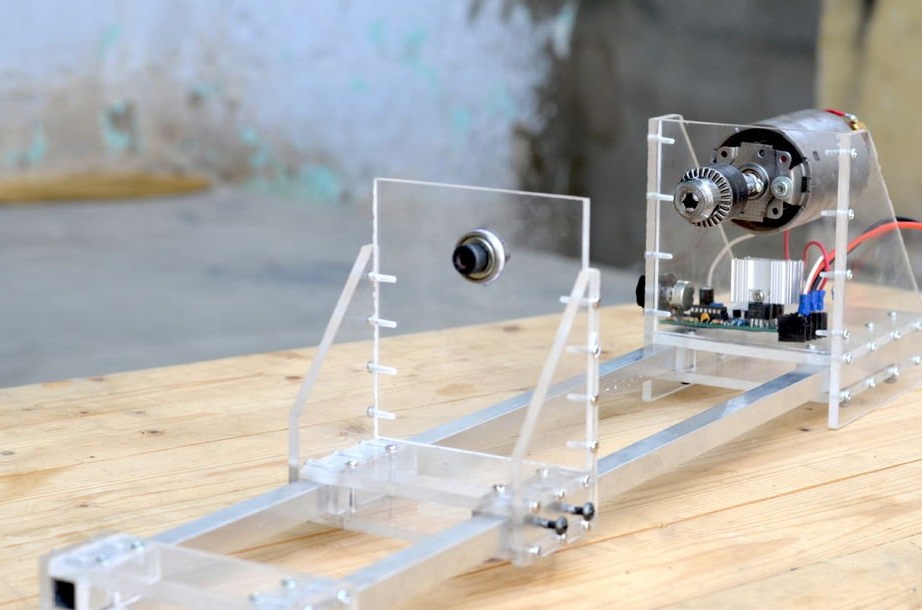
Vaihe 5: Laakeripesän kokoaminen
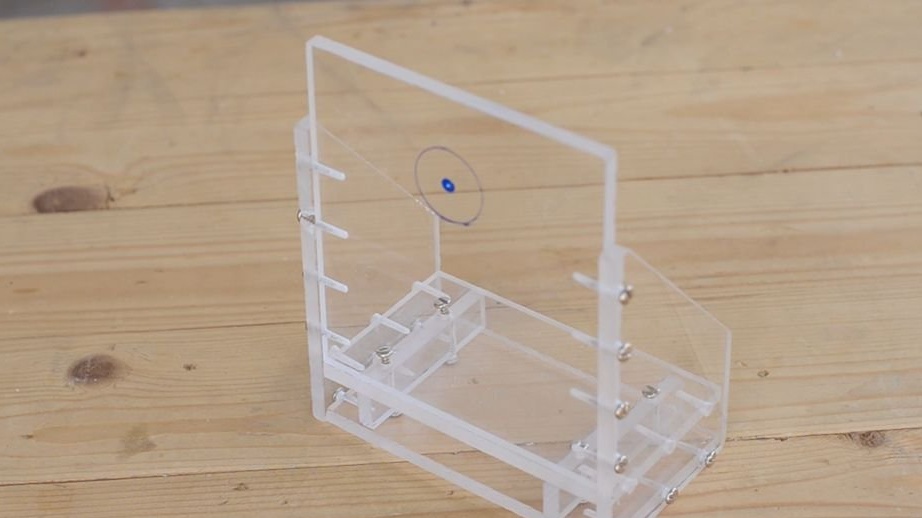


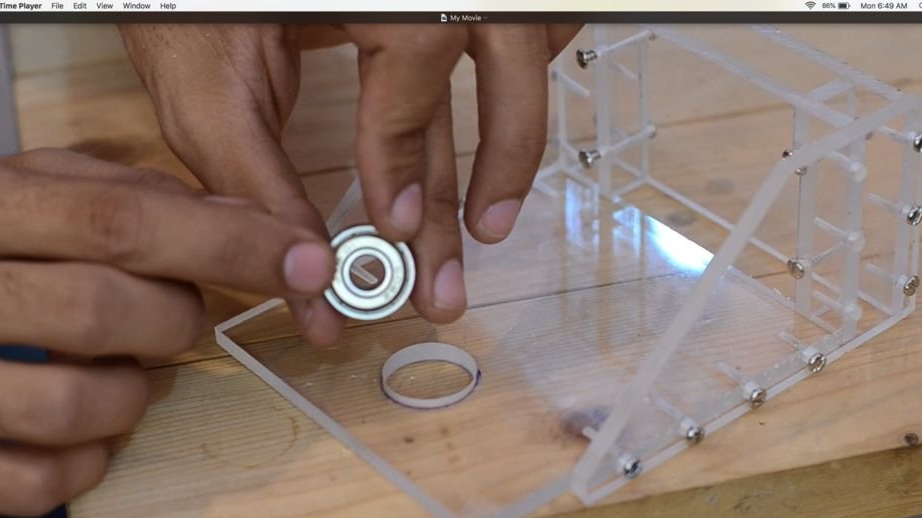
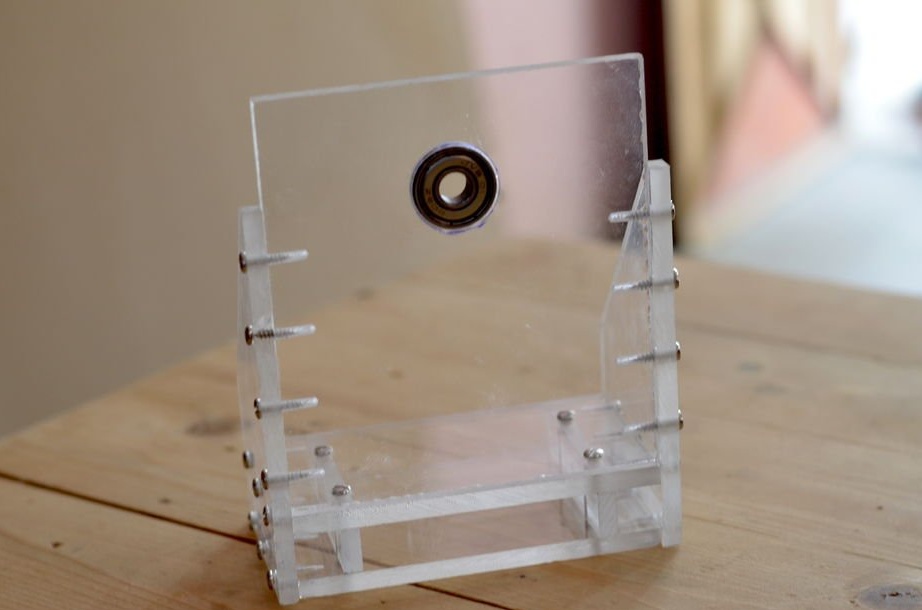

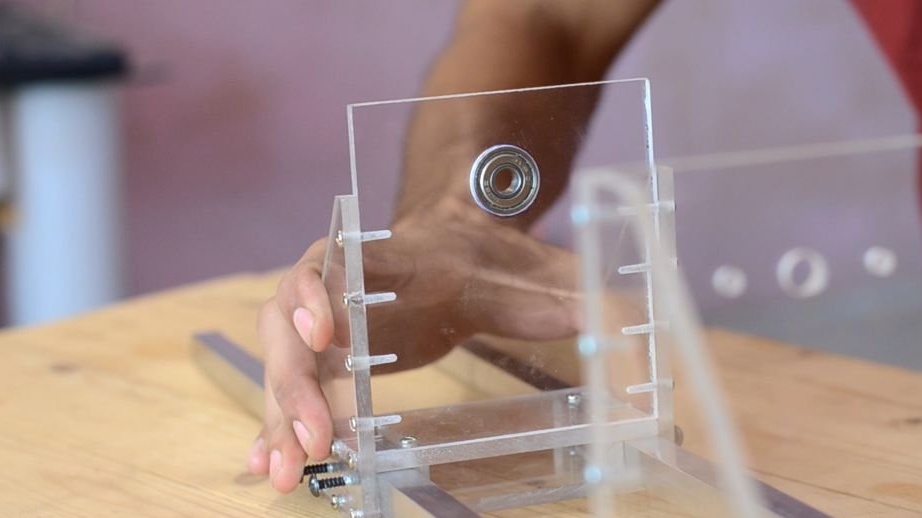
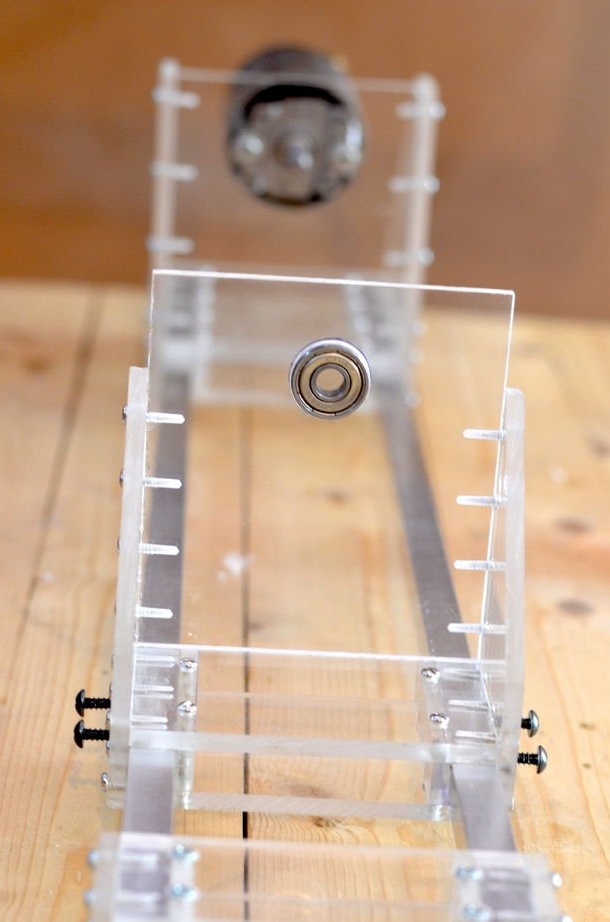
Laakeri on asennettu jalustalle moottoria vastapäätä.Tätä varten porataan reikä ja pyöreän viilan avulla se suurennetaan haluttuun kokoon. Laakerin ulkomitat ovat 32 mm, sisäiset 8 mm. Myöhemmin akseli, jonka halkaisija on 8 mm, asennetaan laakerin sisään. Valmiin reiän laakeri työnnetään tiukkaan ilman liimaa. Laakerinpitimellä on vapaa liikkuvuus ohjauskiskoa pitkin.
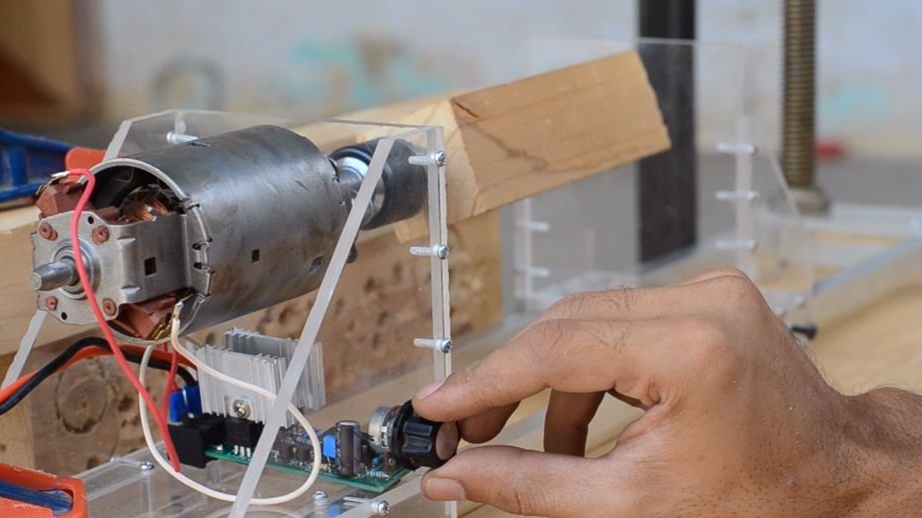
Vaihe 6: Moottorin nopeuden ohjain
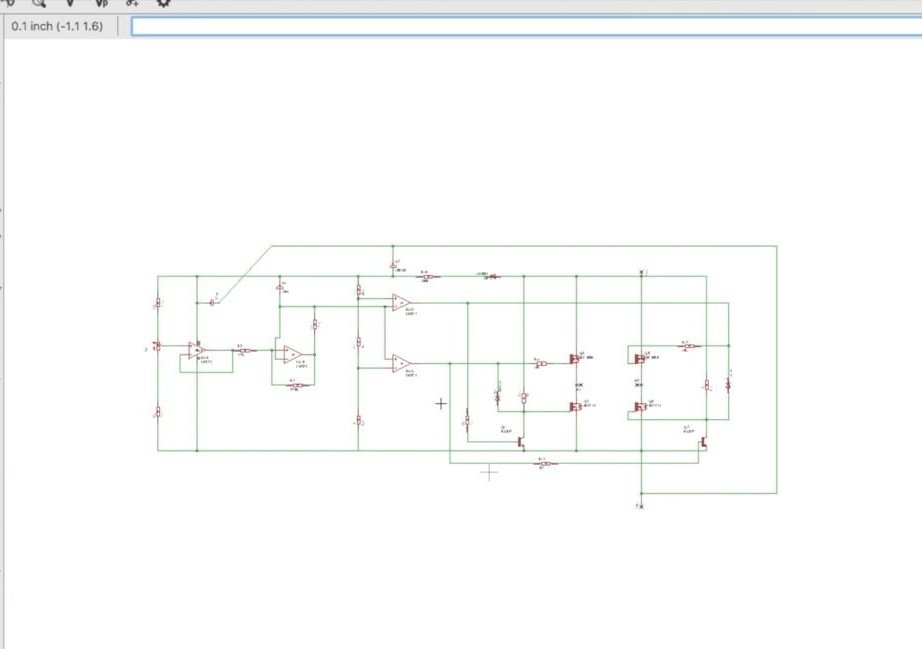

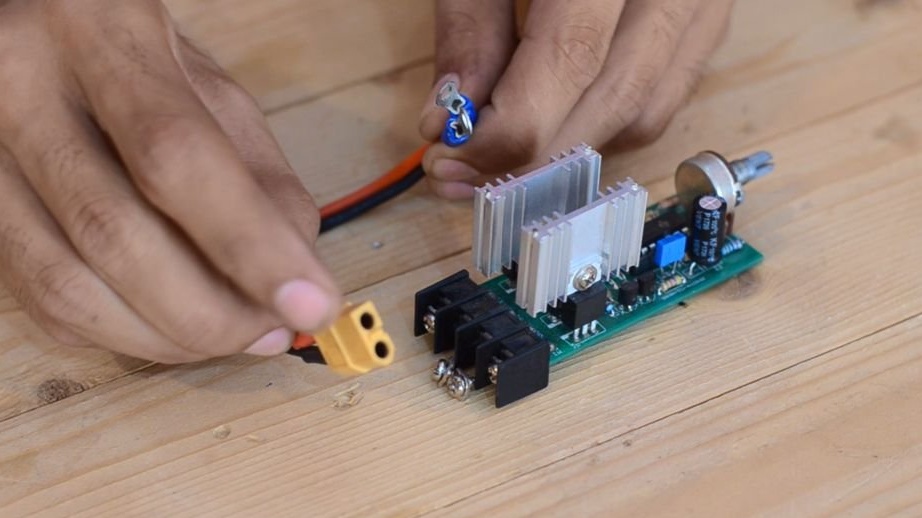
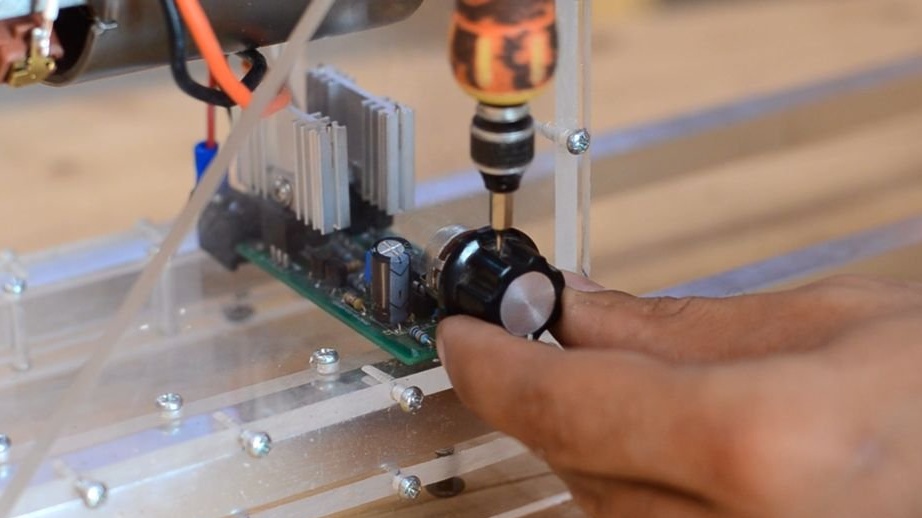
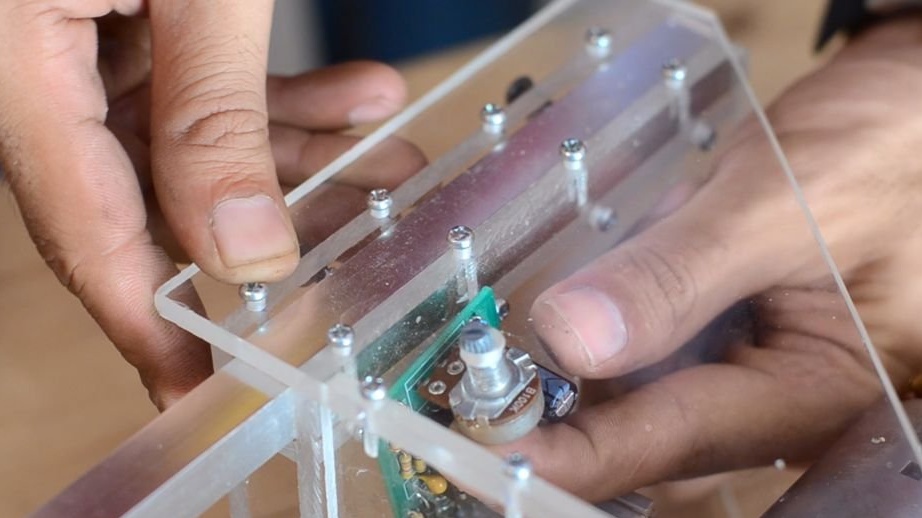
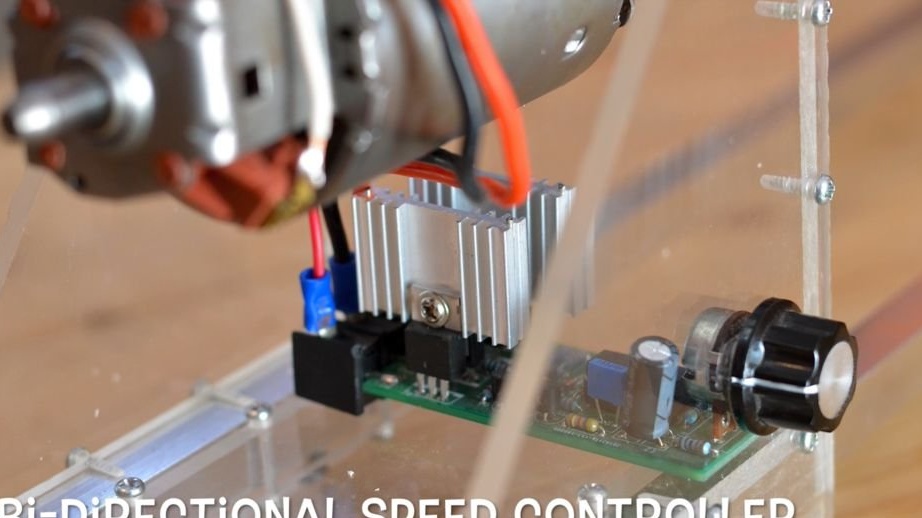

Sorvin ohjaamiseksi sinun on koottava kaksisuuntainen nopeussäädin, jonka avulla voit hallita nopeutta ja pyörimissuuntaa vain yhdellä kahvalla.
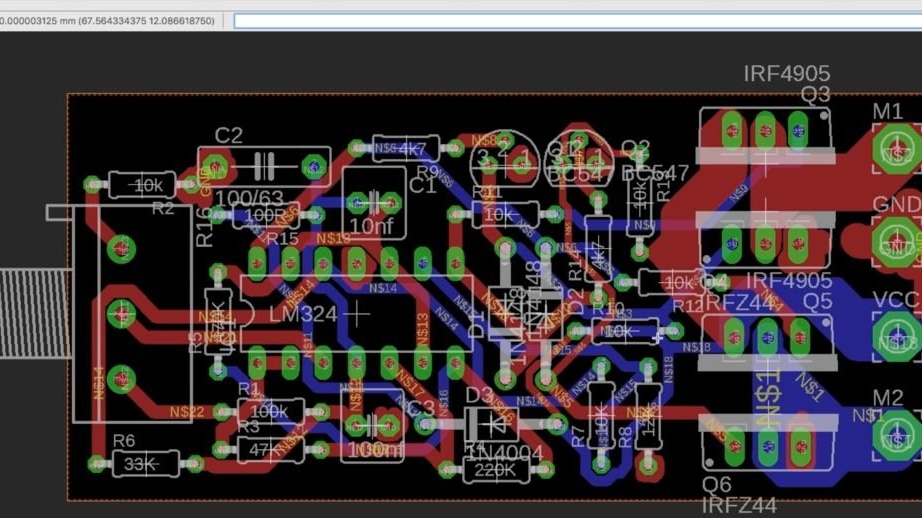
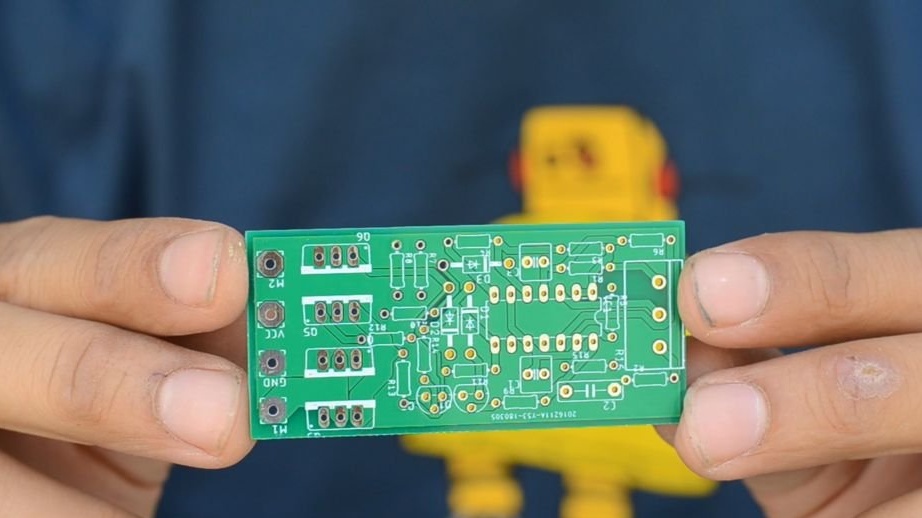
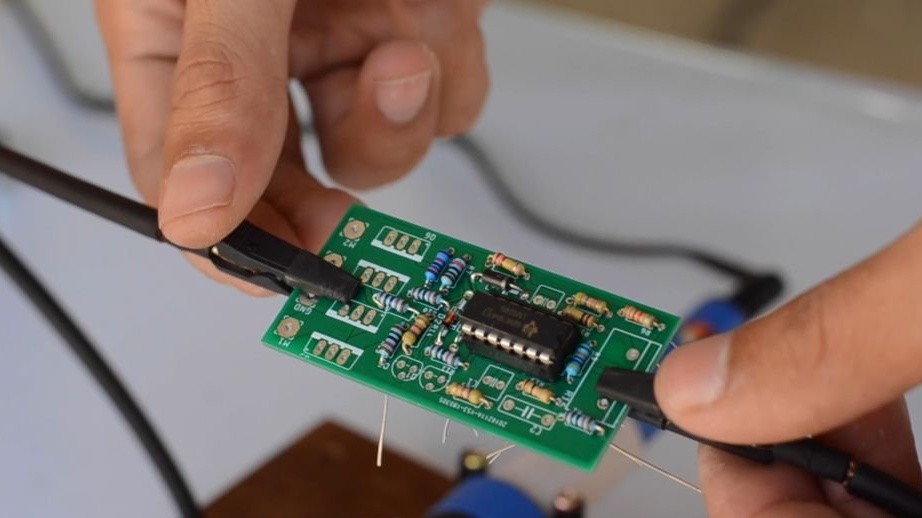
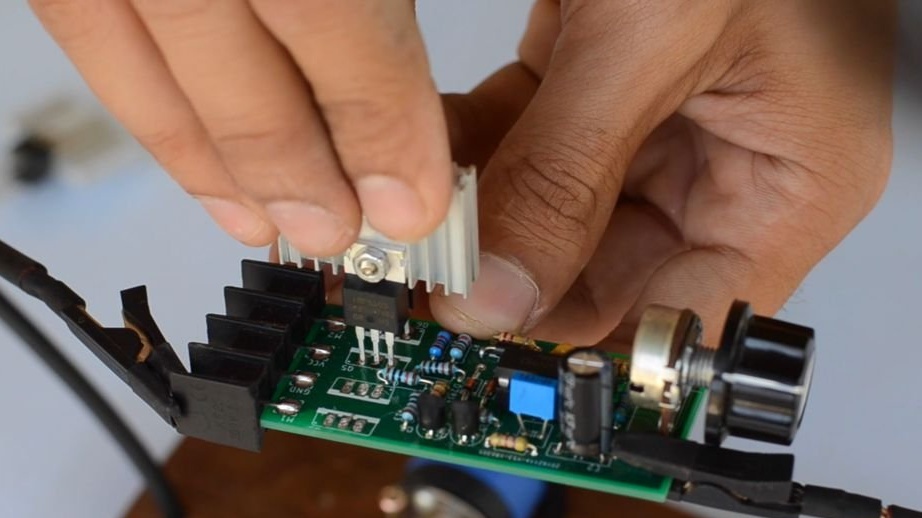
Tätä varten kehitettiin piiri kaksisuuntaiselle nopeussäätimelle, joka perustuu LM324-moottorin ohjaimen siruun. Mosfets N- ja P-kanavia käytetään suuren määrän energian ohjaamiseen. Lisäksi sujuvan toiminnan varmistamiseksi päätettiin rakentaa tämä nopeusohjain piirilevylle seinäkiinnikkeen sijasta. Piirilevy on suunniteltu tämän kaavion mukaisesti. Painetut piirilevyt valmistettiin tilauksesta yhdelle kiinalaiselle sivustolle, nimeltään JLCPCB.com. Ne ovat yksi Kiinan suurimmista piirilevyvalmistajista. Jos haluat tilata painettuja piirilevyjä, sinun on ladattava Gerber-tiedostot ja lataamisen jälkeen tarkistettava seuraavat parametrit, kuten piirilevyjen lukumäärä, paksuus ja väri.
Ensimmäisellä tilauksella tällä sivustolla voit tilata 10 piirilevyä, vain 2 dollaria, toimituskustannukset huomioon ottaen.
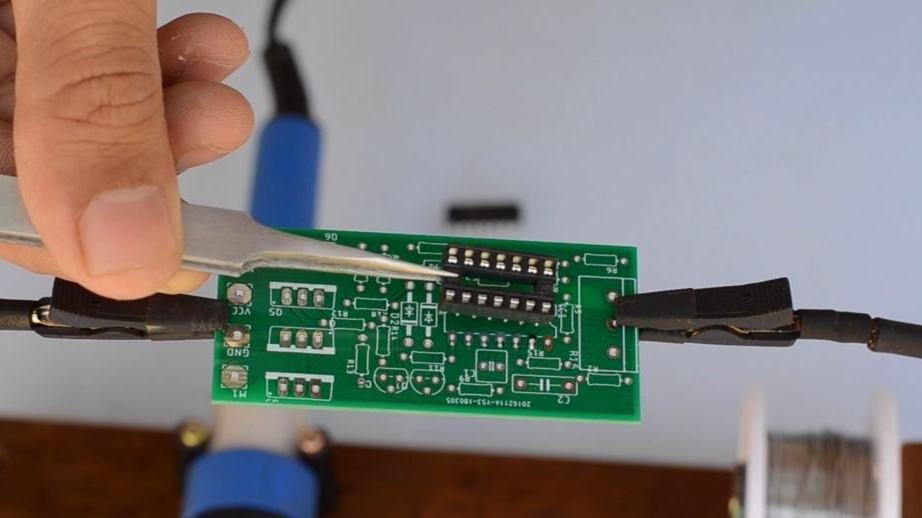
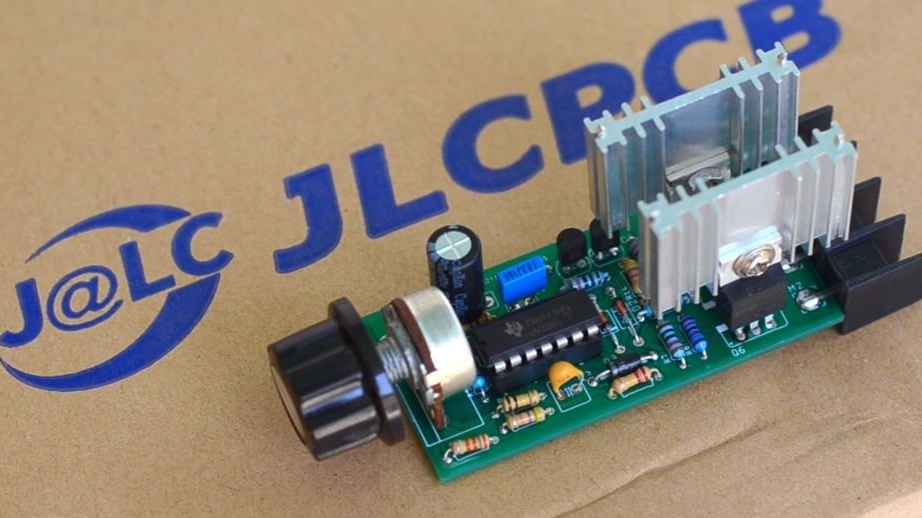
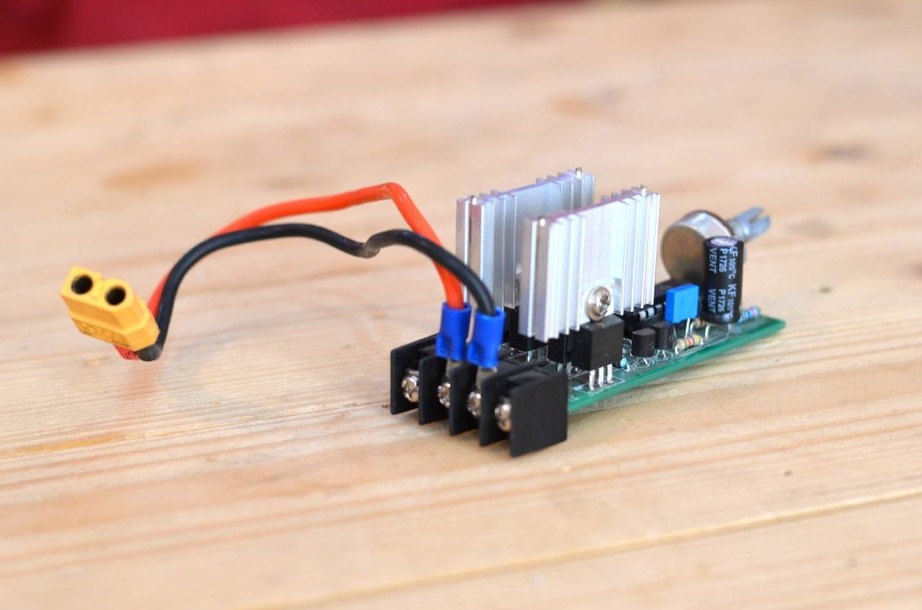
Painetut piirilevyt toimitettiin viikon sisällä ja niiden laatu on moitteeton.
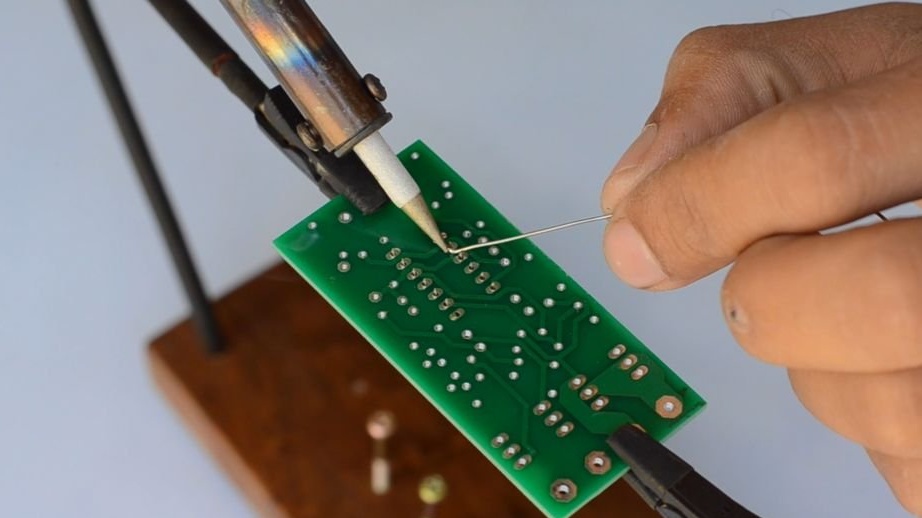
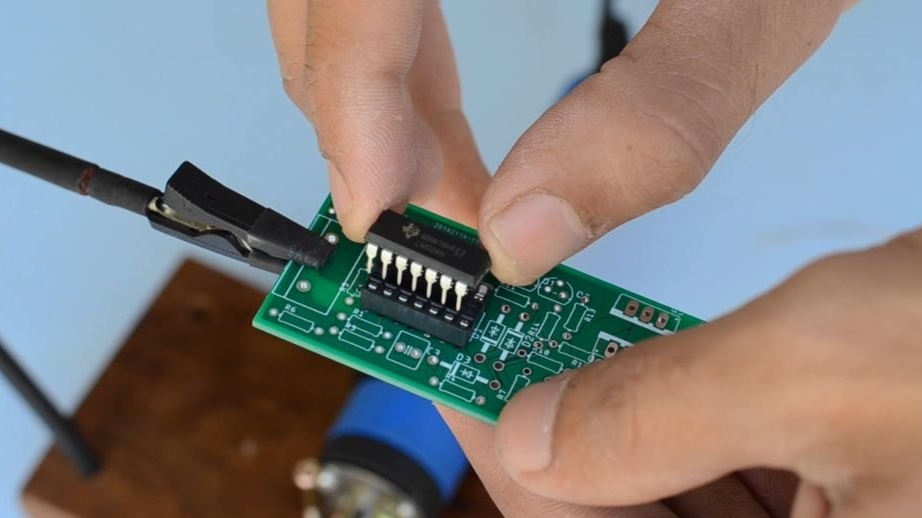
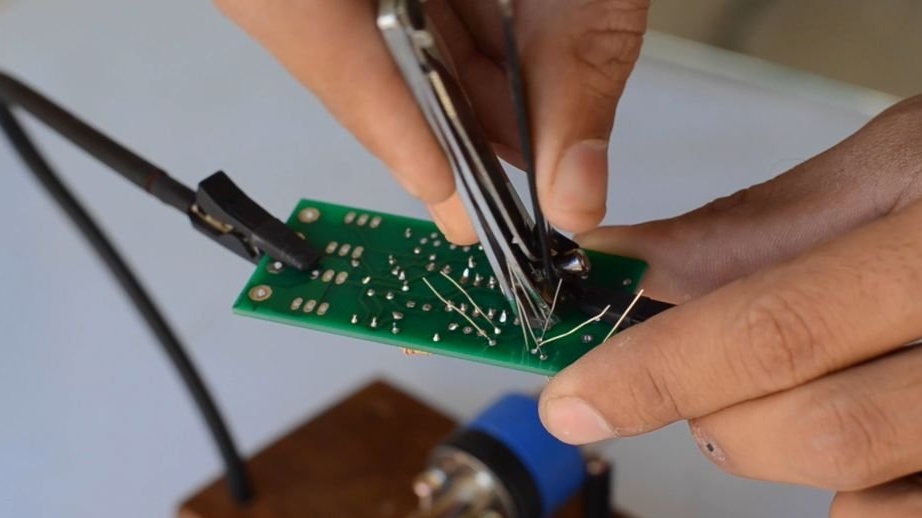
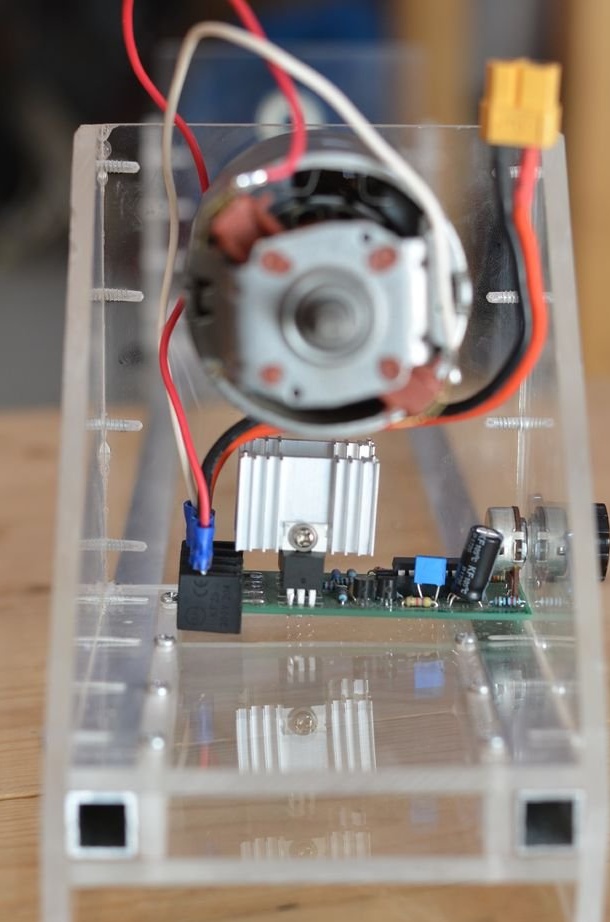
Myöhemmin kaikki komponentit juotettiin piirilevylle, kuten kaaviossa esitetään.
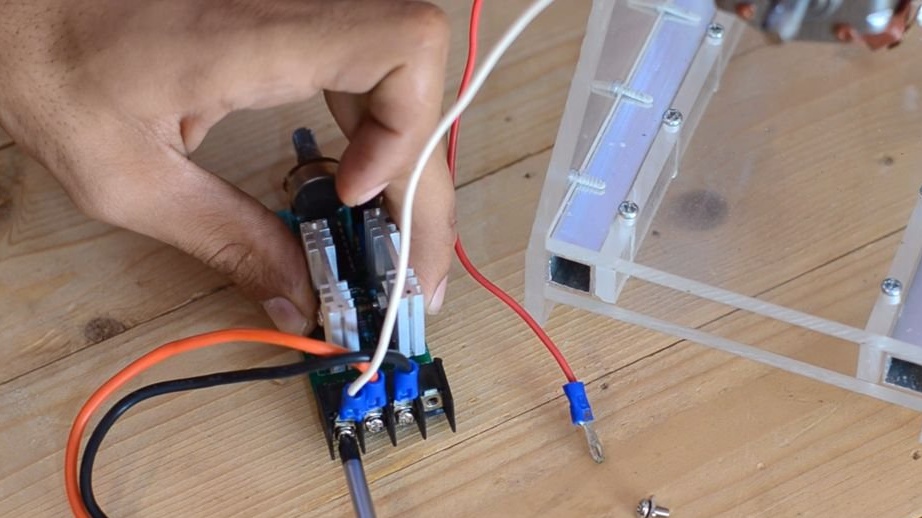
Kun nopeussäädin on valmis, tulojohdot on kytketty XT 60 -liittimeen toisella puolella.
Tässä tapauksessa lähtöjohdin menee suoraan moottorille.
Vaihe 7: Lisää keskitappi (tailstock)









Pyörivän elementin pitämiseksi tehtiin ruuvi, jolla oli terävä pää. Ruuvi teroitettiin penkkihiomakoneella ja poralla. Ruuvi kiristettiin sitten kuulalaakerimutterilla liikkuvien esineiden keskipisteen tukemiseksi.
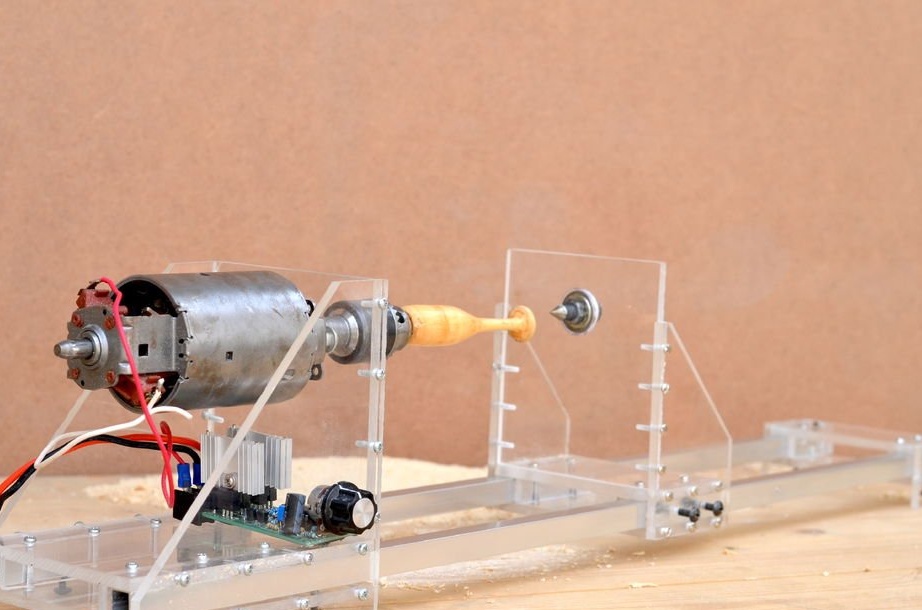
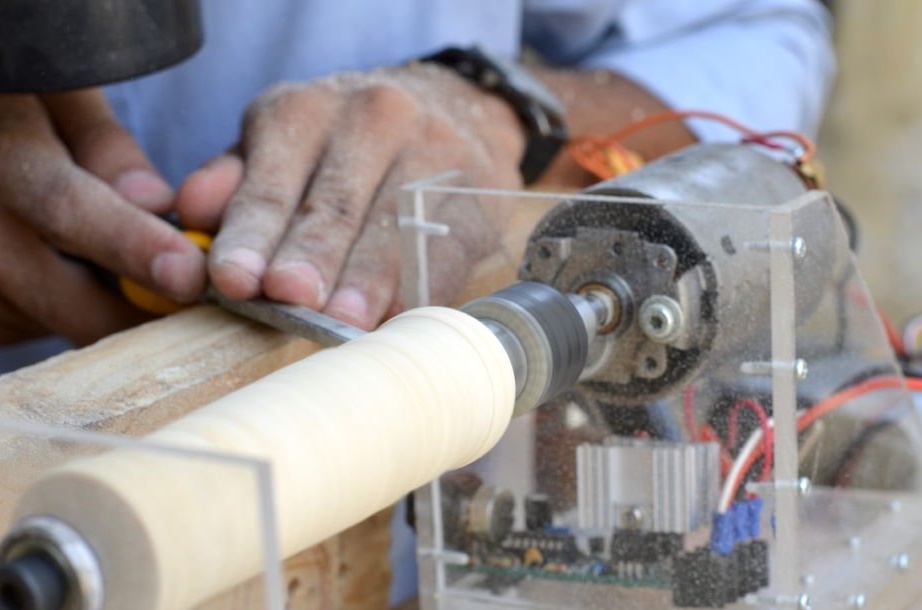
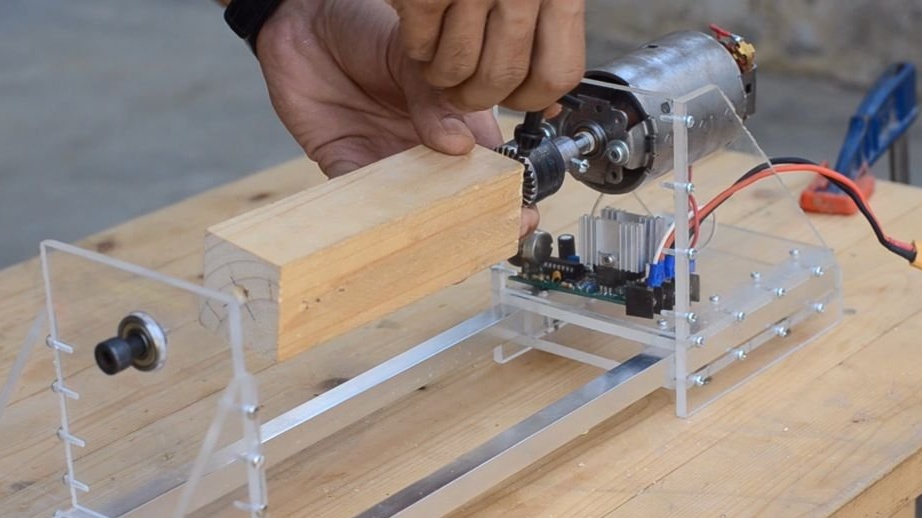
Vaihe 8: Lopputulokset
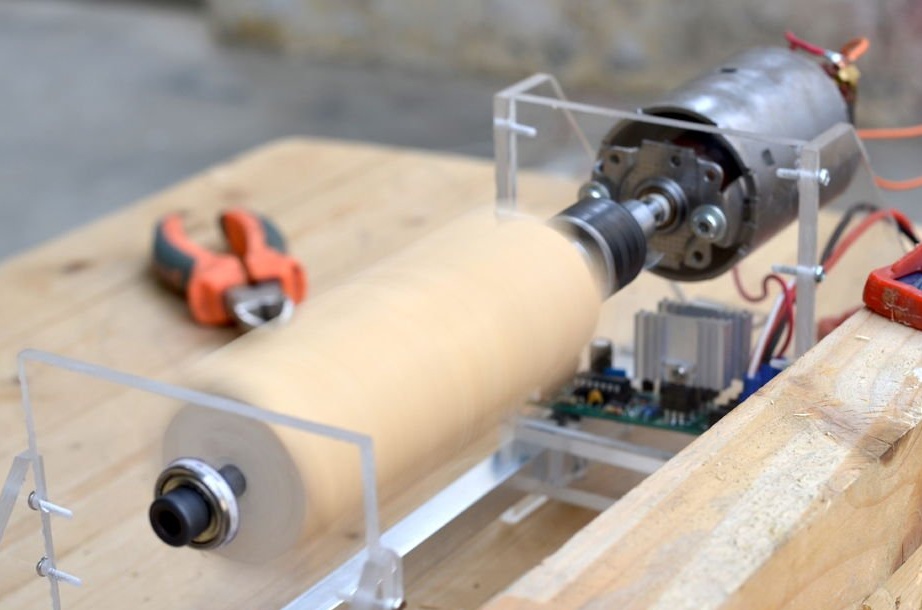
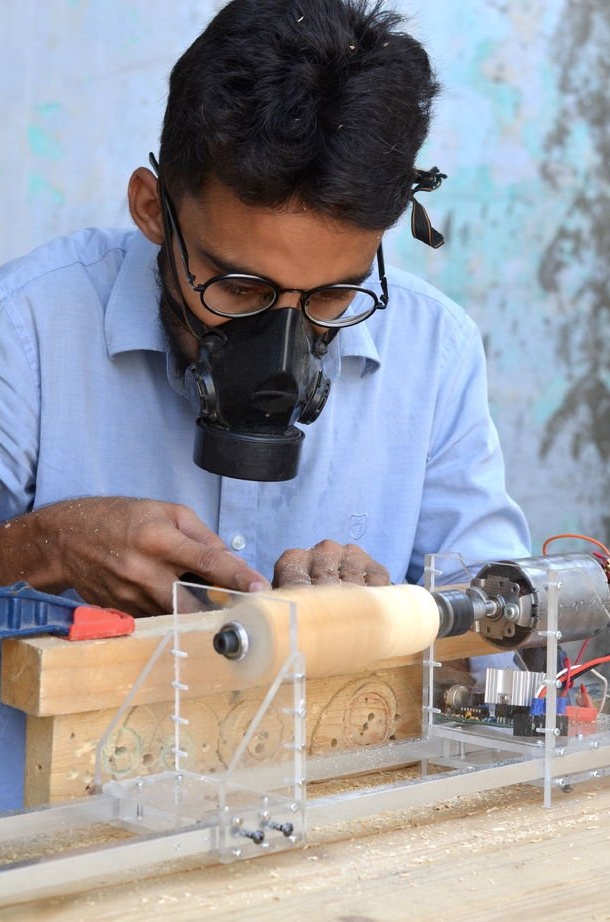

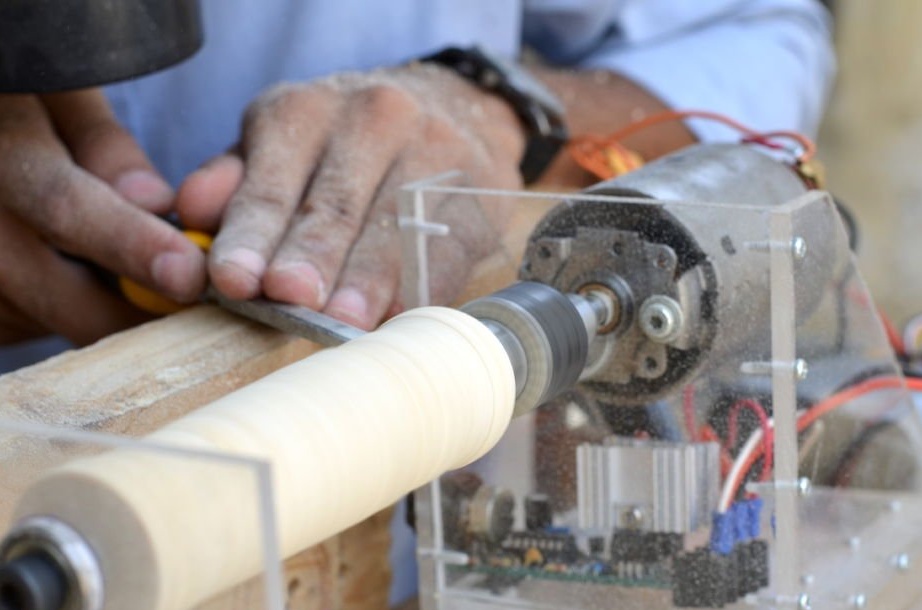




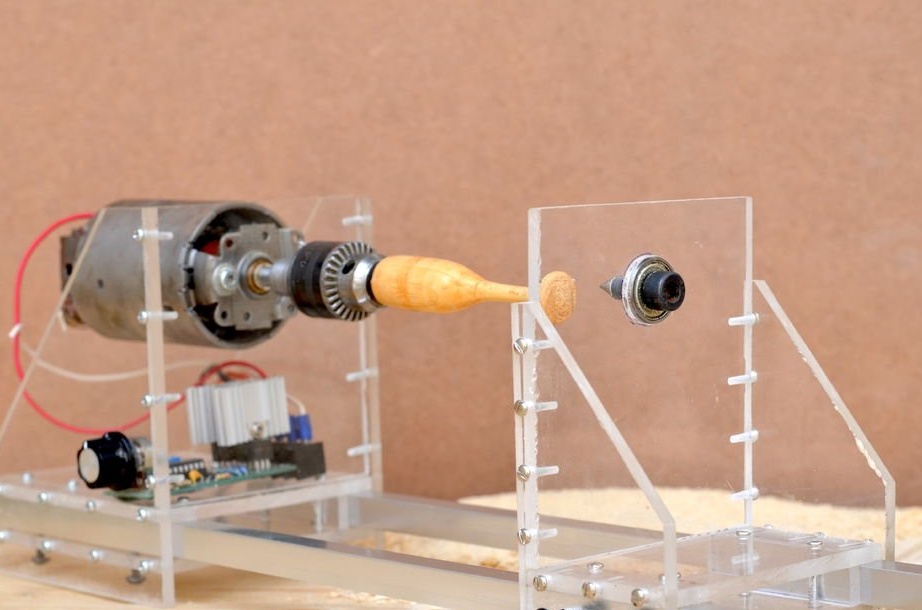
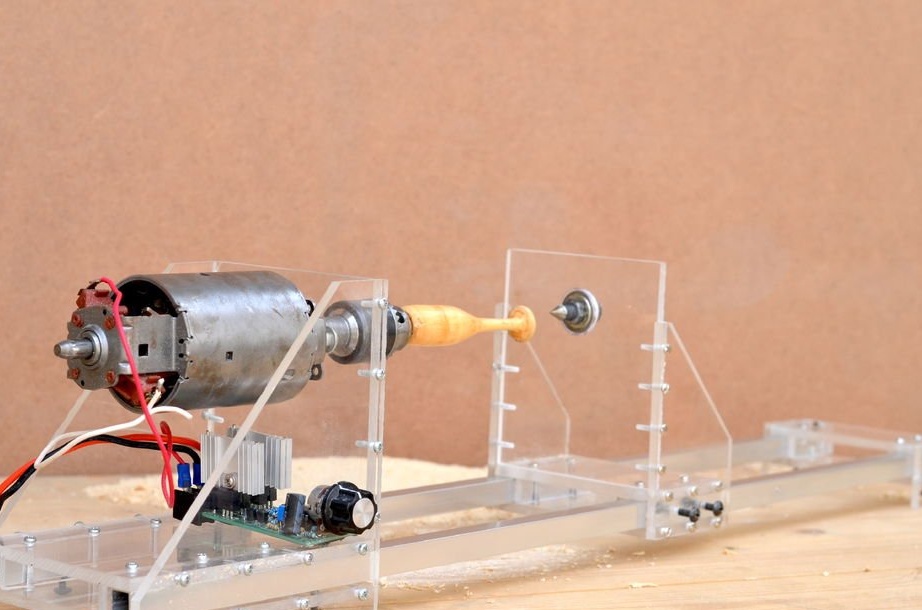

Projekti oli onnistunut, koska kaikki toimii hyvin. Ainoa ongelma, jonka tapasin oli, että sovitin rajoittaa koneen tehoa. Siksi sinun on käytettävä hoverboard-akkua (tasapainottava skootteri), joka voi antaa tarvittavan virran. Akun käyttö voi kestää jopa puoli tuntia jatkuvaa puun sorvausta.
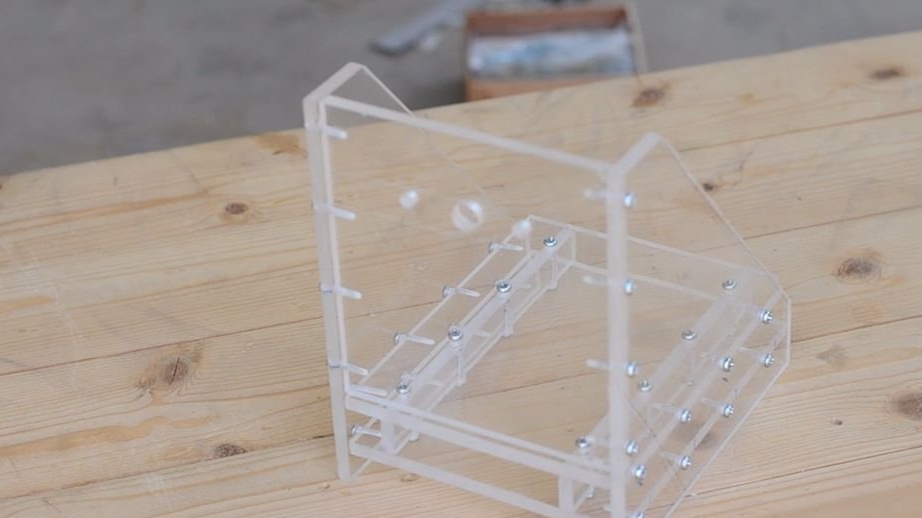
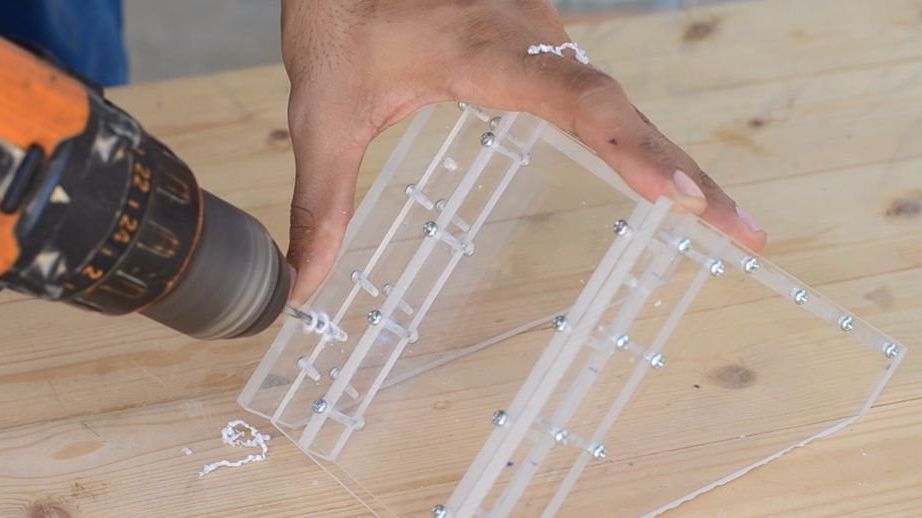
Plexiglass-rakenne antaa rakenteelle tyylikkään ulkonäön ja on erittäin kestävä, koska yhtäkään ruuvia ei ruuvattu irti puolen tunnin jatkuvan käytön jälkeen.
Sorvin valmistusprosessi näkyy alla olevassa videossa: