


Tässä artikkelissa velho kertoo meille, kuinka hän teki älypuhelimen ohjaaman robotti baarimikon.
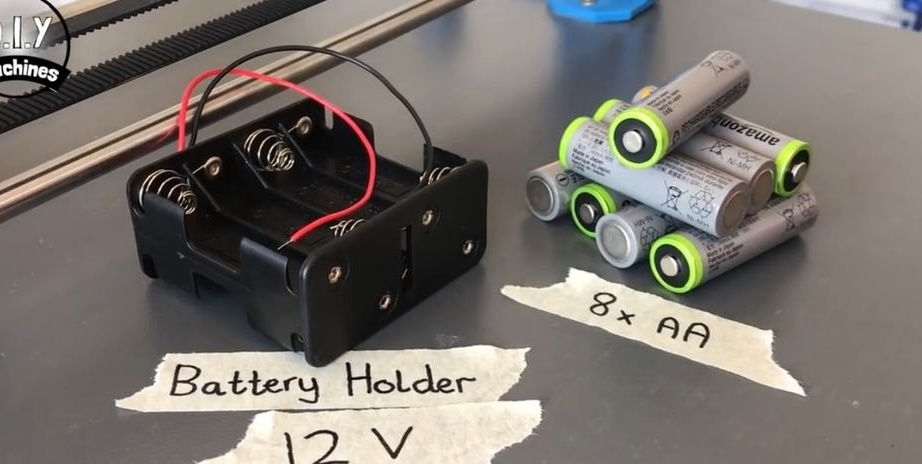
Laitteen ominaisuudet: työskentele Arduinolla, edullinen hinta, bluetooth-ohjaus mistä tahansa laitteesta, autonomia (työskentele 8 AA-paristolla).
Tällaisen laitteen rakentamiseksi päällikkö käytti seuraavaa
Materiaalit ja työkalut:
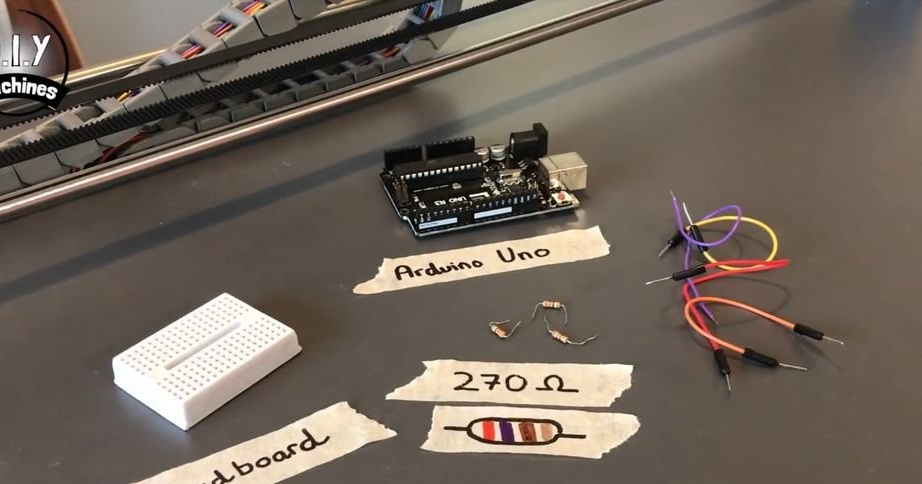
-Työläs uno;
-Käyttömoottori L293D;
- kosketinkytkin;
- Lineaariset laakerit;
-Step moottori;
-Hihna ja hihnapyörä (versio 2m);
-Hihna ja hihnapyörä (versio 5m);
-HM10 Bluetooth-moduuli;
-Ruuvimeisseli;
-Krepezh;
-Nozhki;
-Pöydän yläosa;
-3D-tulostin;
-Metallitangot;
- ruuvimeisseli;
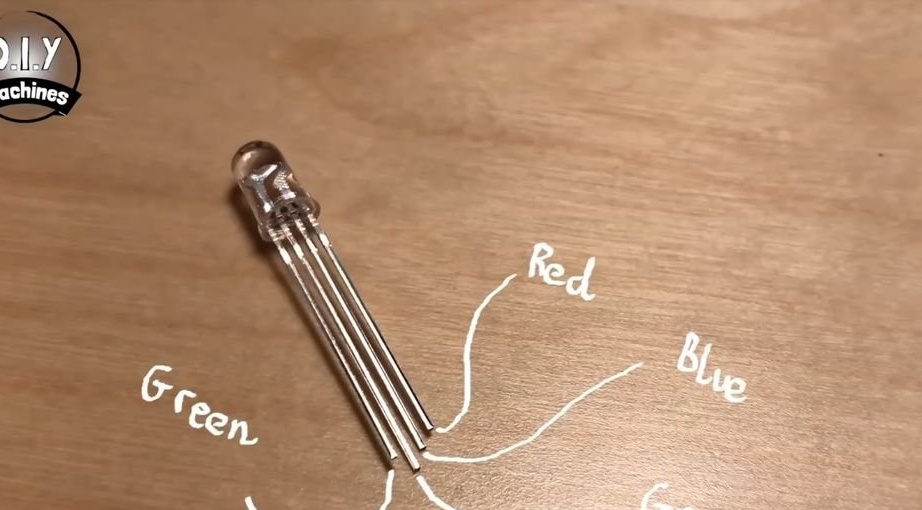
- RGB LED;
näkö-;
-Juotto tarvikkeet;
-Izolenta;
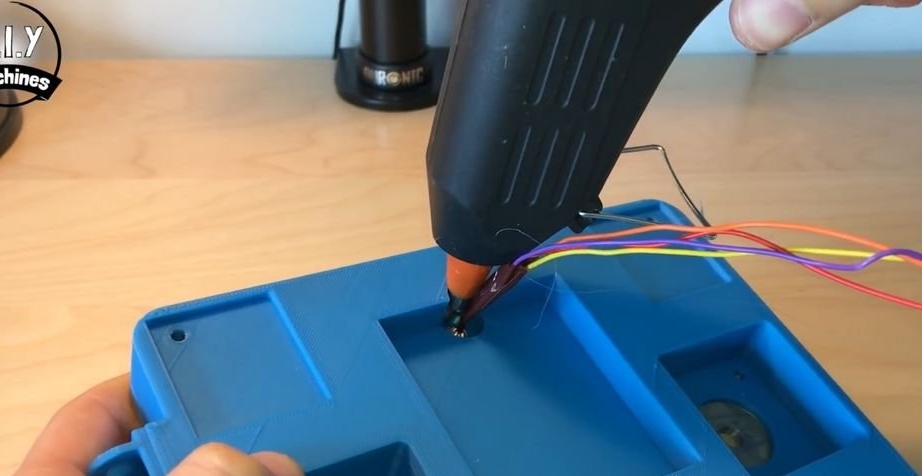
-Glue ase;
-Paristokotelo;
-Konnektory;
Nappiparisto;
-Tietokone ohjelmistolla;
- pullojen pidikkeet;
-The venttiili;
Pullo;
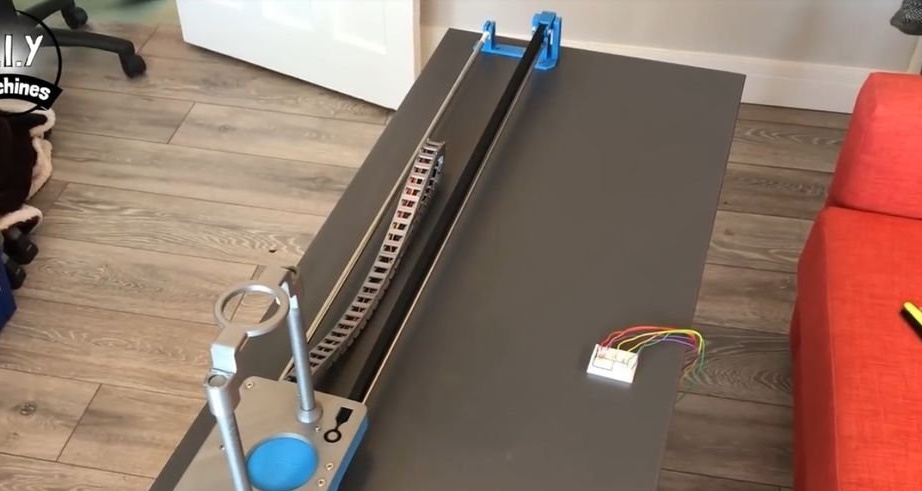
Vaihe yksi: Taulukko
Ensinnäkin isäntä kerää pöydän. Pöydän koko 120 * 45 cm, pöydän paksuus 18 mm.


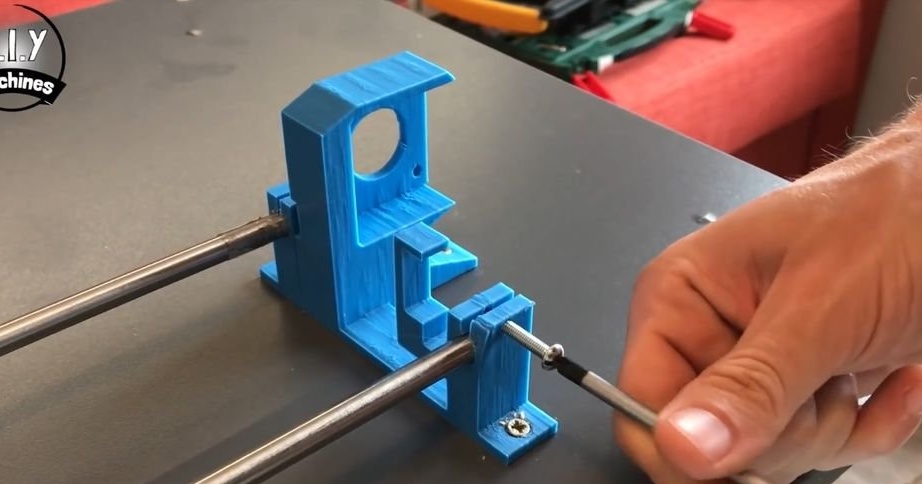
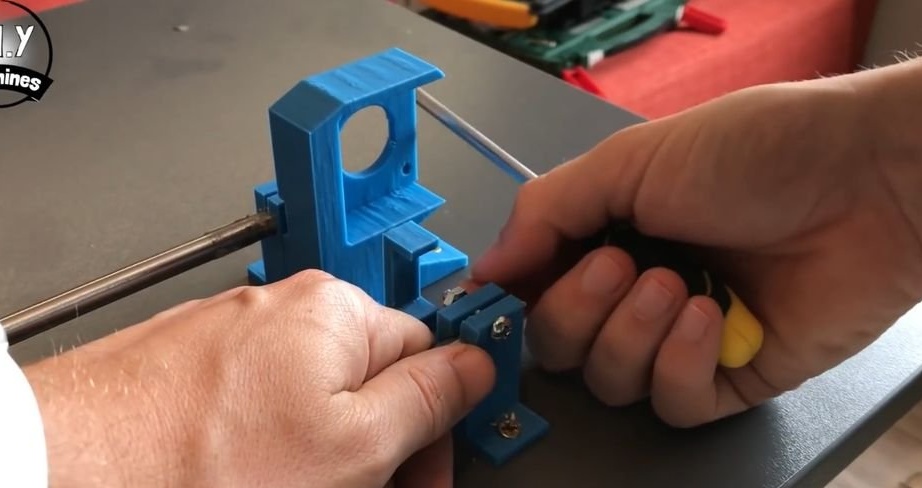
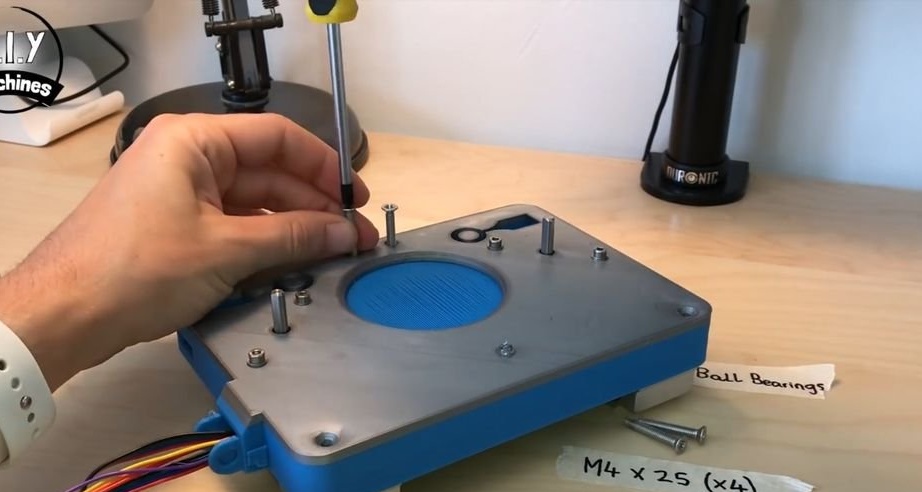
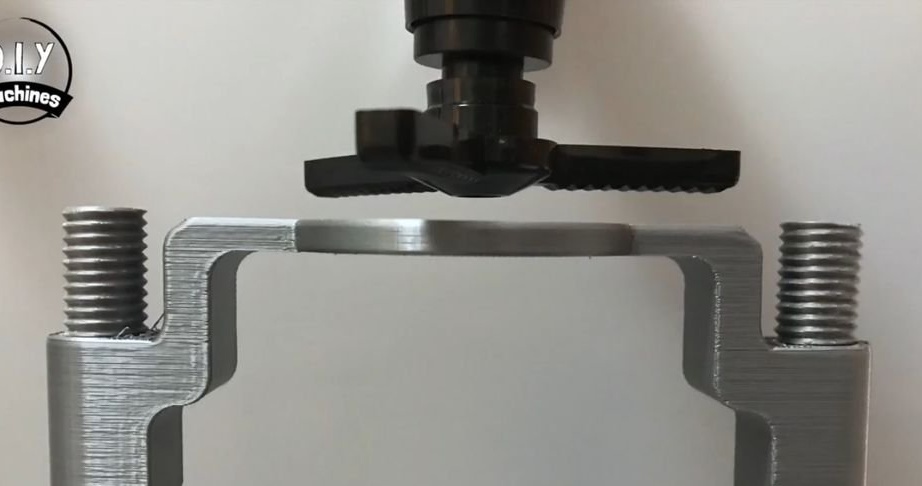
Vaihe toinen: Kiristin
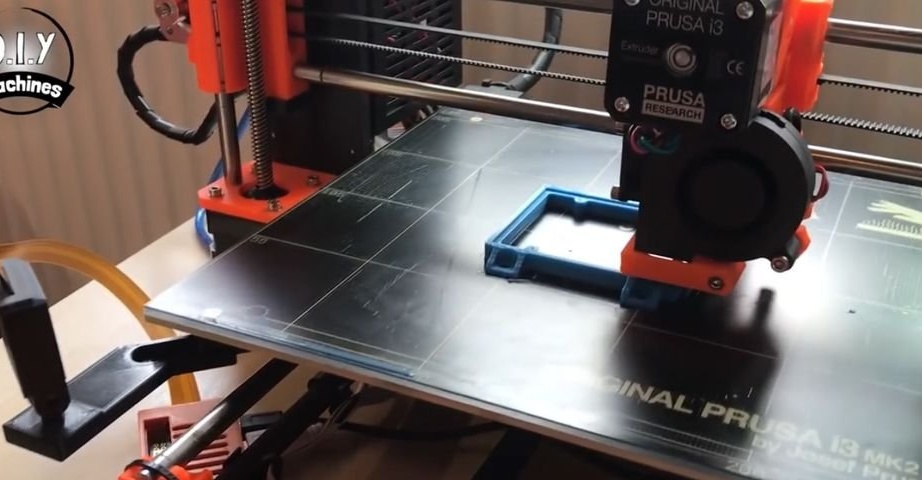
Osien tulostustiedostot voi ladata alla.
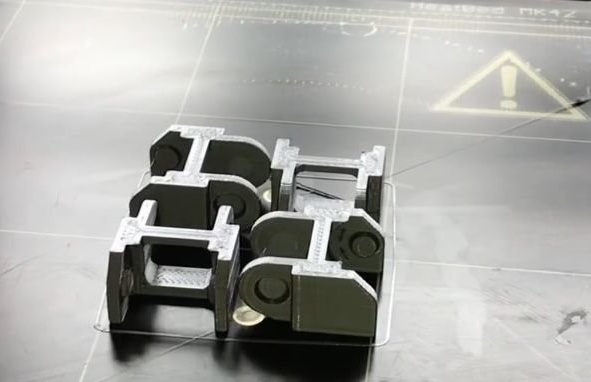
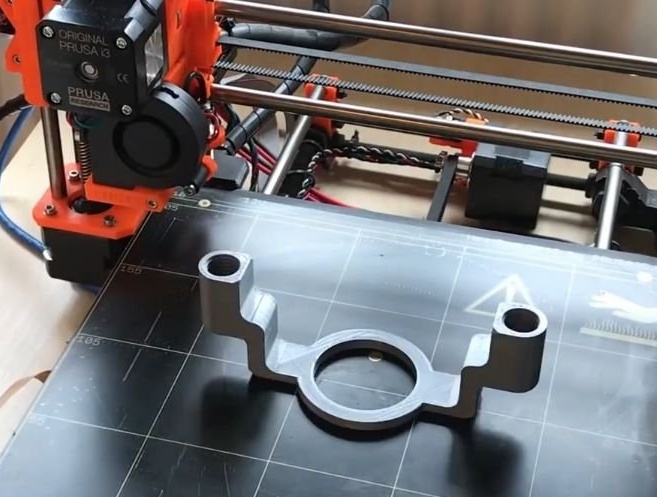
3D-tiedostojen tulostaminen.
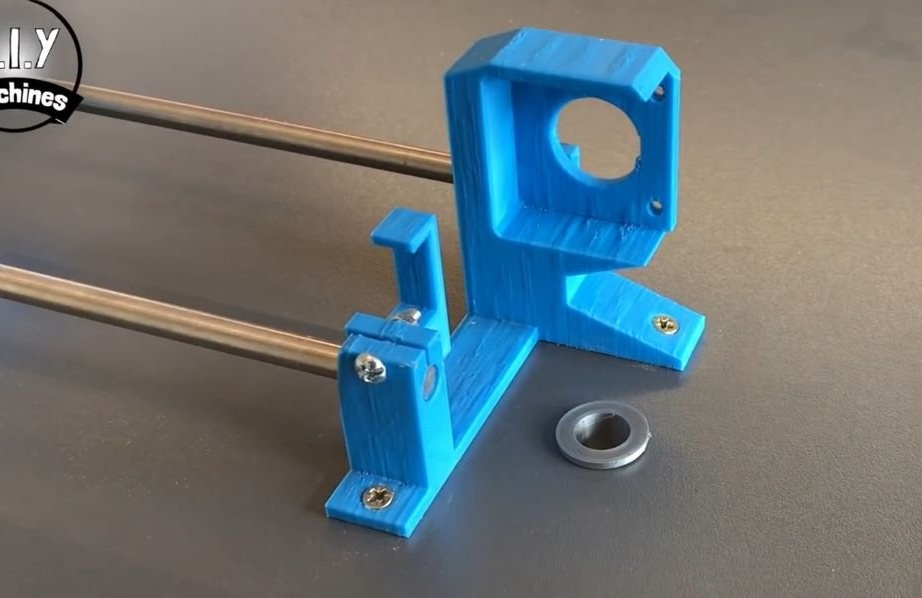
Nyt on tarpeen tulostaa kaksi ensimmäistä tietoa “idler.stl” ja “Rod_Clamp_V5.stl”.
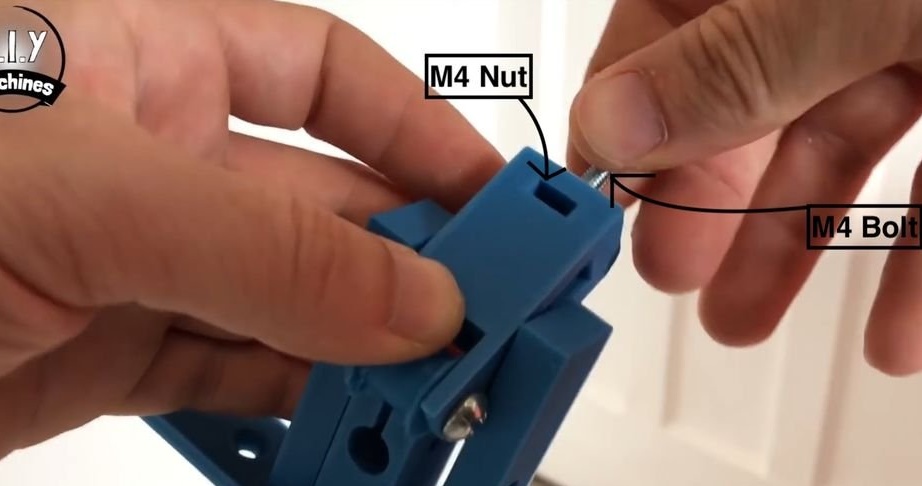
Tulostamisen jälkeen on tarpeen kiinnittää kiristysrulla varren kiinnittimeen pitkällä M4-pultilla ja mutterilla. Vahvaa kiinnitystä ei tarvita, koska telan on pyöritettävä vapaasti.
Sitten kaksi osaa kiinnitetään toisiinsa.
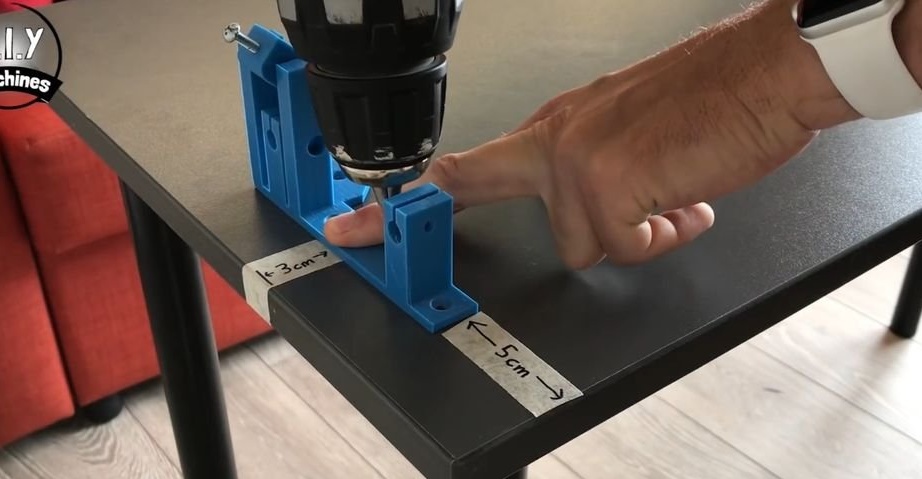
Merkitsee pöydälle 3 cm vasemmasta lyhyestä päästä ja 5 cm etureunasta ja kiristää kiristimen.

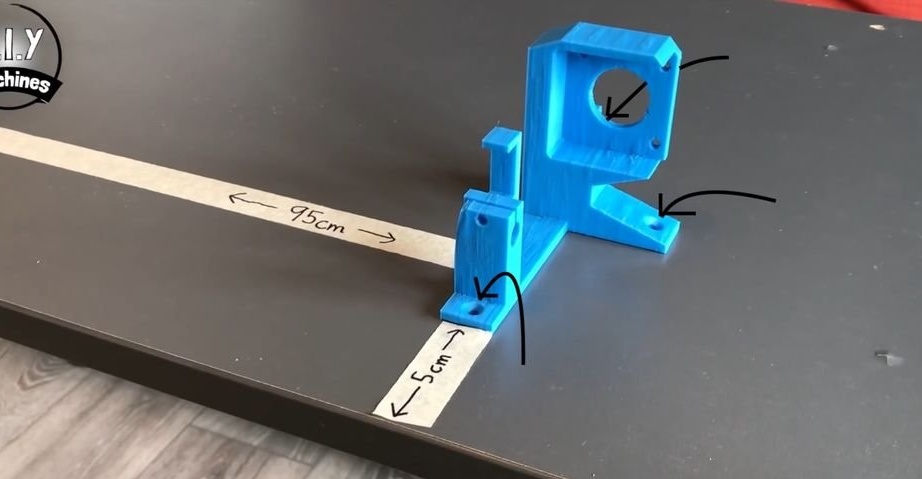
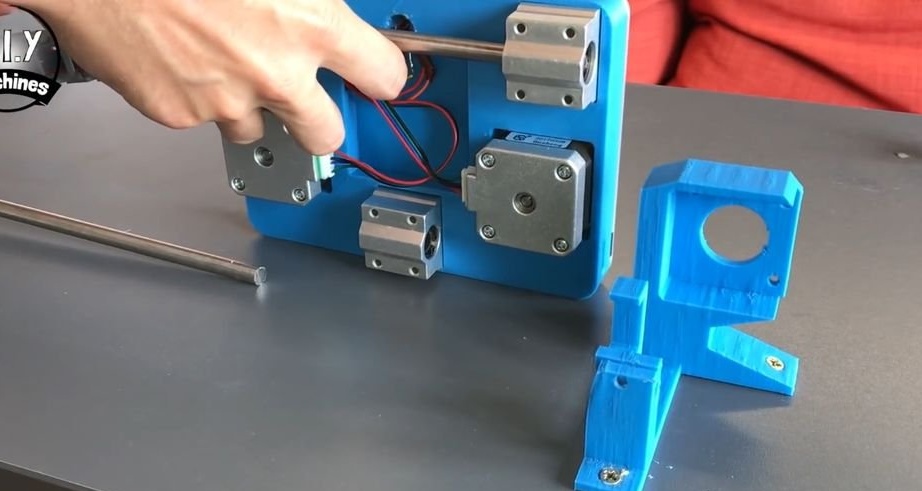
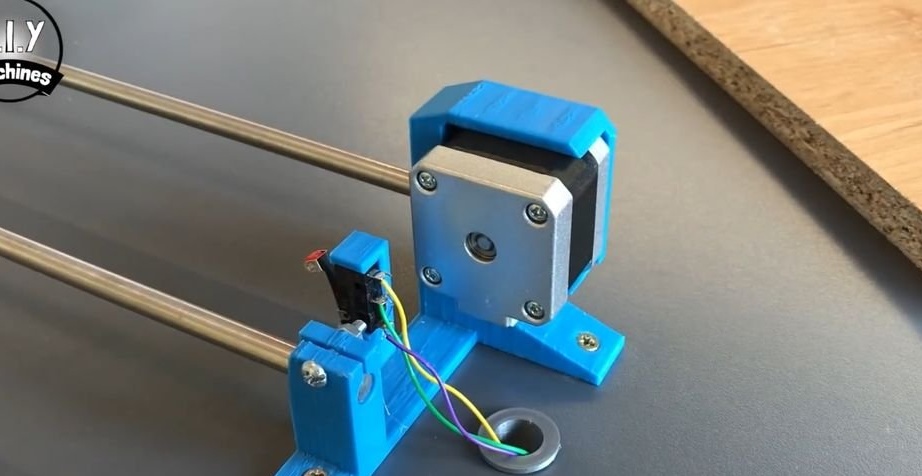
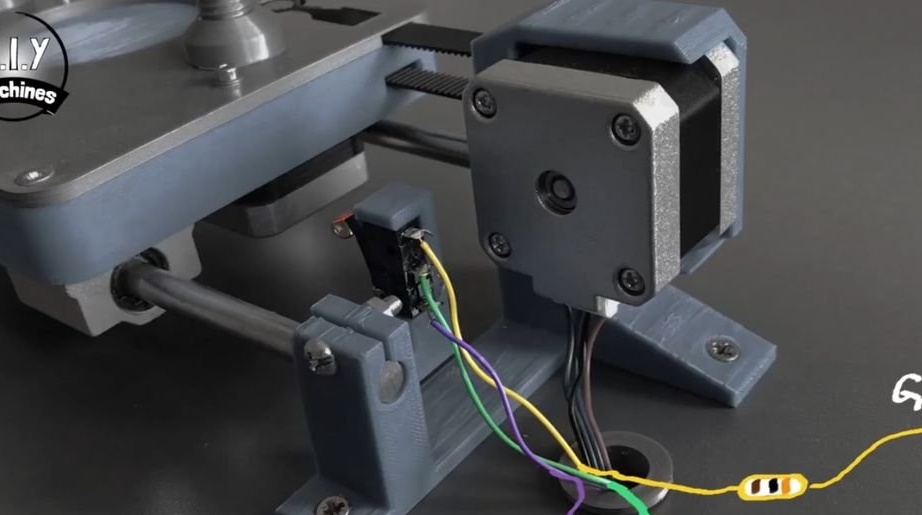
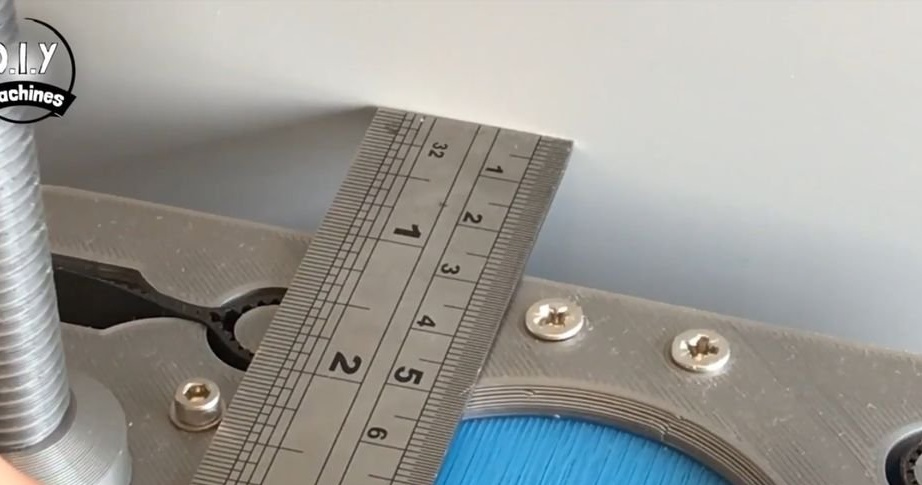
Vaihe toinen: Moottorin kiinnitys
Tulostaa moottorin pidikkeen, tiedosto "X_Axis_Motor_Mount.stl". Kiinnittyy pöydälle 95 cm etäisyydelle kiristimestä ja 5 cm etäisyydelle pöydän reunasta.
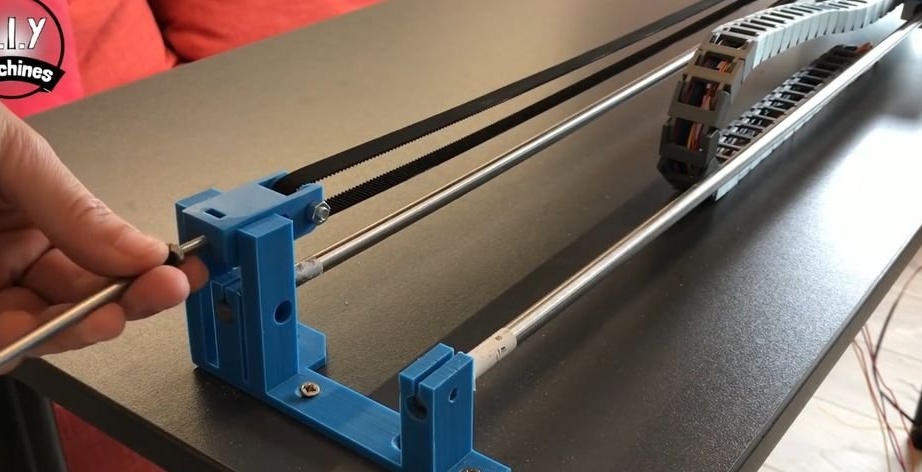
Kolmas vaihe: Oppaat
Asettaa oppaat. Tankojen pituus on 1 metri.
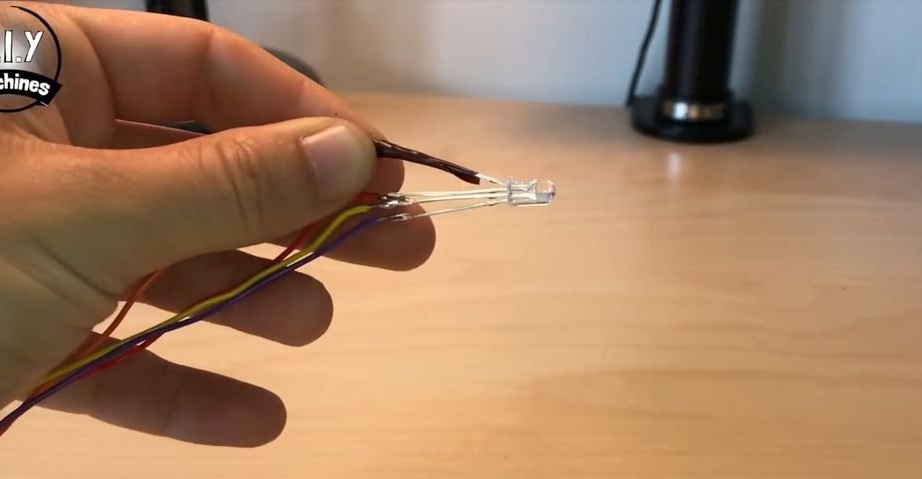
Vaihe neljä: LED
Päällikkö käyttää RGB-LEDiä merkkivaloon. Juotetaan 180 cm erivärisiä lankoja kumpaankin jalkaan. Risteys eristää.




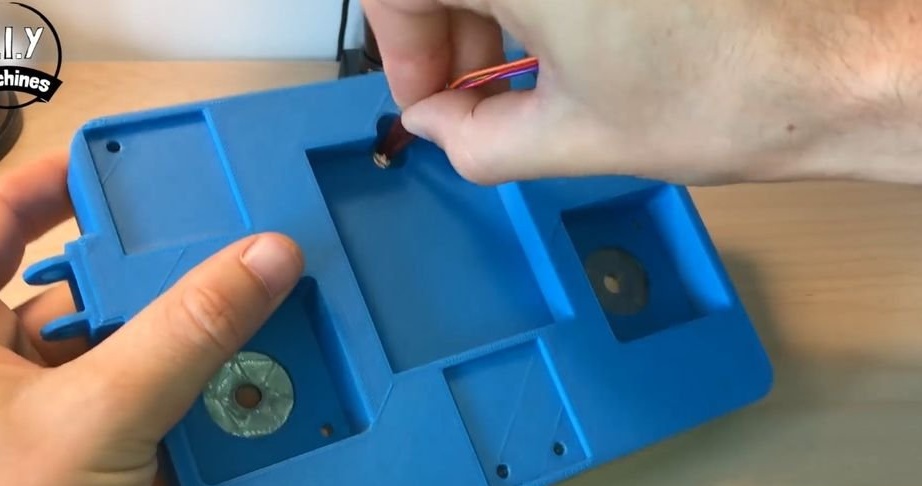
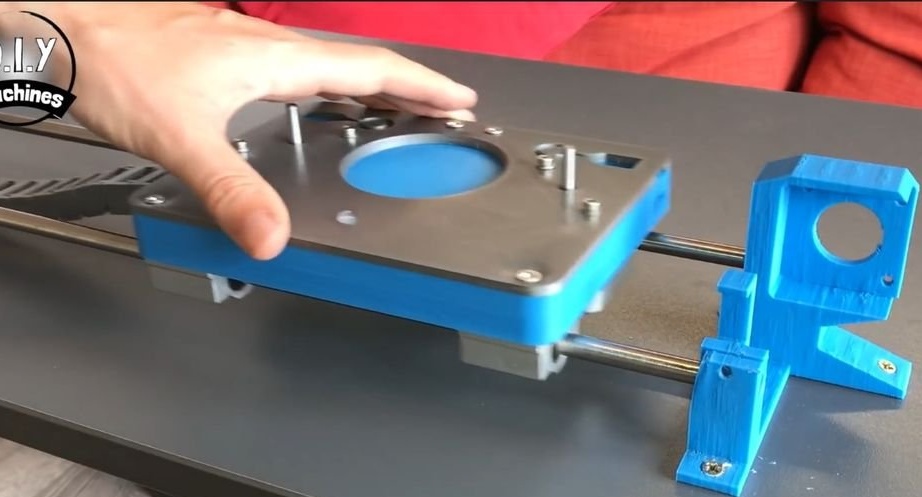
Vaihe viisi: alusta
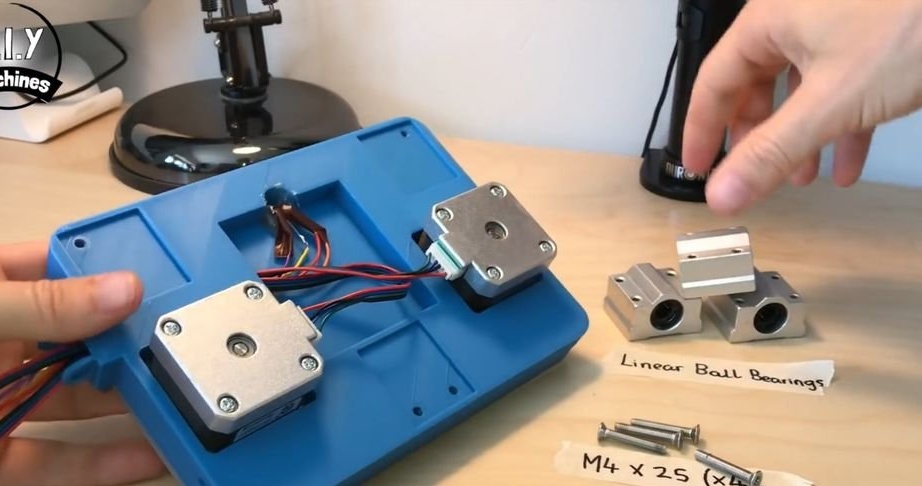
Tulostaa osan 'slider_base_v3.stl'. Korjaa LEDin. Asentaa askelmoottorit.
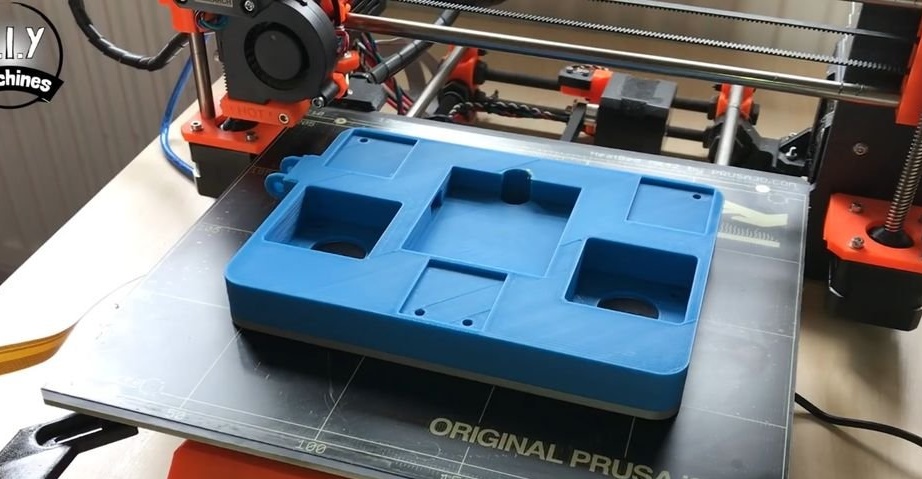

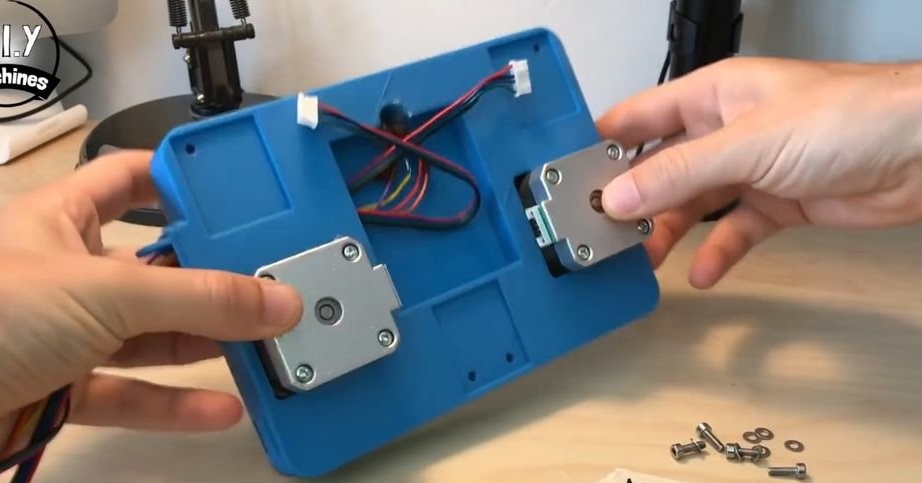
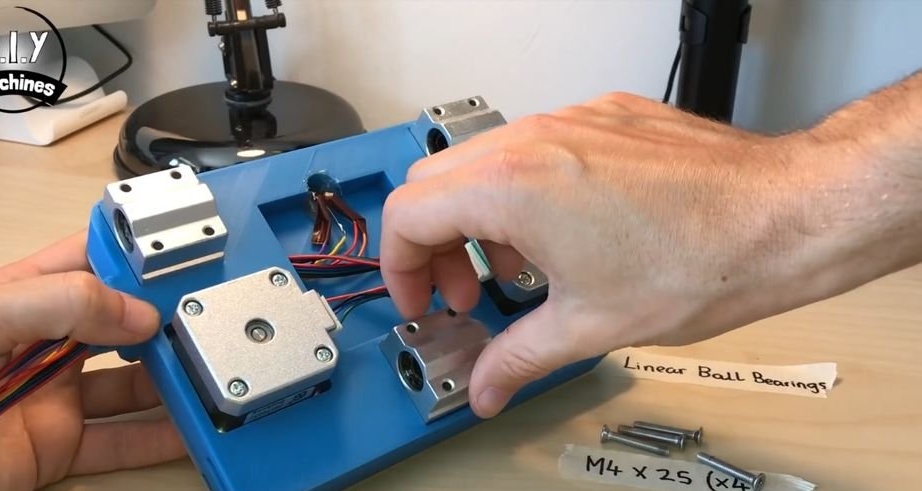
Asentaa lineaariset laakerit.
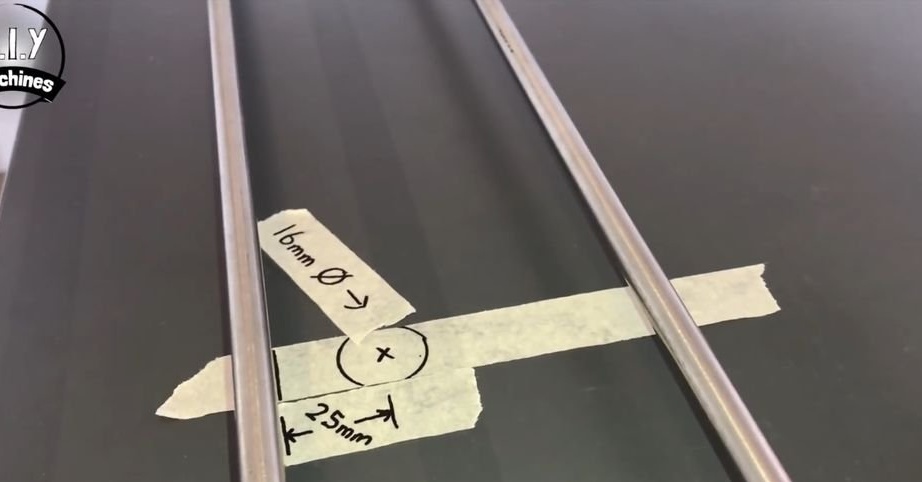
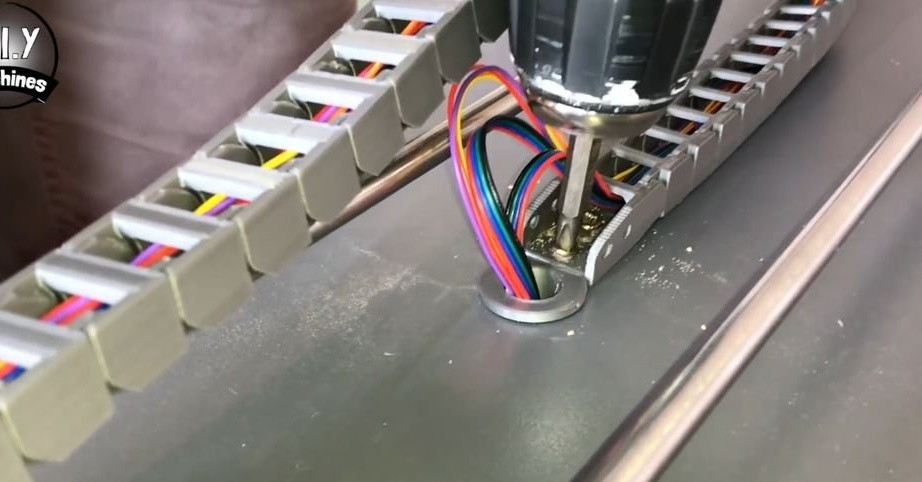
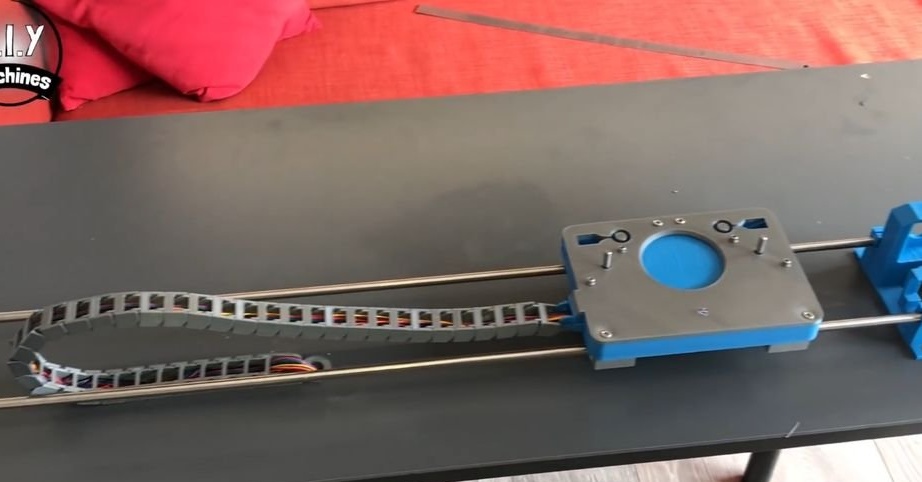
Vaihe kuusi: Kaapelikanava
Laitteen kaapelikanava koostuu erillisistä segmenteistä, jotka on kytketty yhteen piiriin.Piirin sisällä johdot asetetaan. Ketju on liikuteltavissa ja taipuu tarvittaessa. Ketjuosat tulostetaan myös tulostimelle.


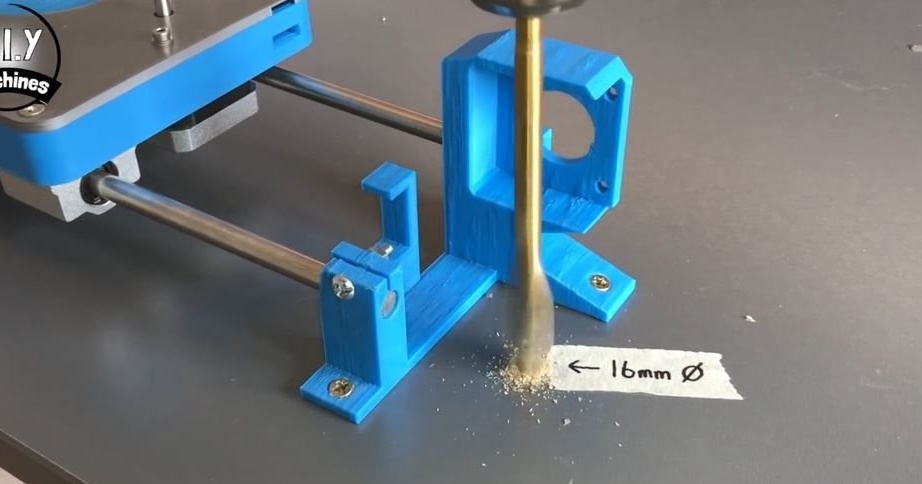
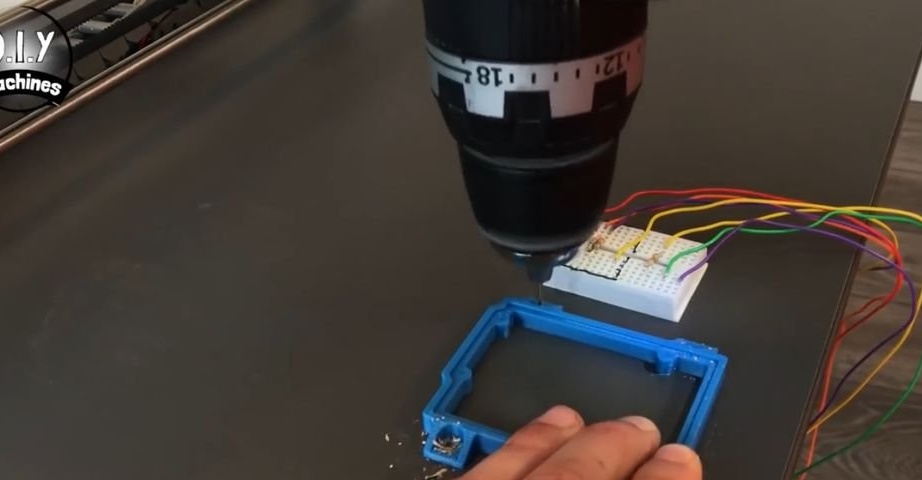
Poraa 16 mm: n reiän 25 mm: n etäisyydestä ääriohjaimesta ja 47 cm: n päässä kiristimestä. Lisää holkki "Table_Tidy.STL" reikään. Kiinnittää kaapelikanavan toinen pää työtasolle, toinen työtasolle holkin viereen. Venyttää johdot.



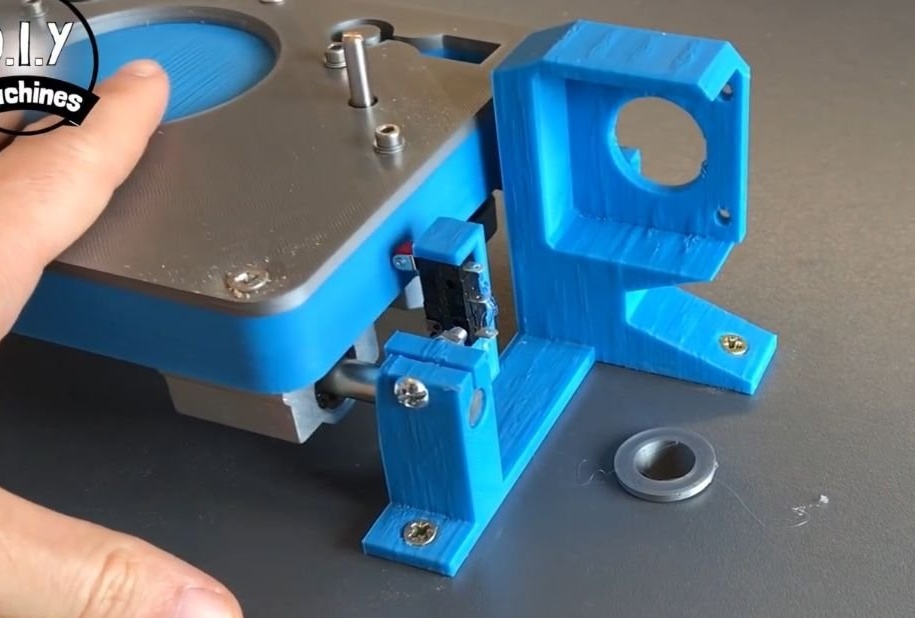
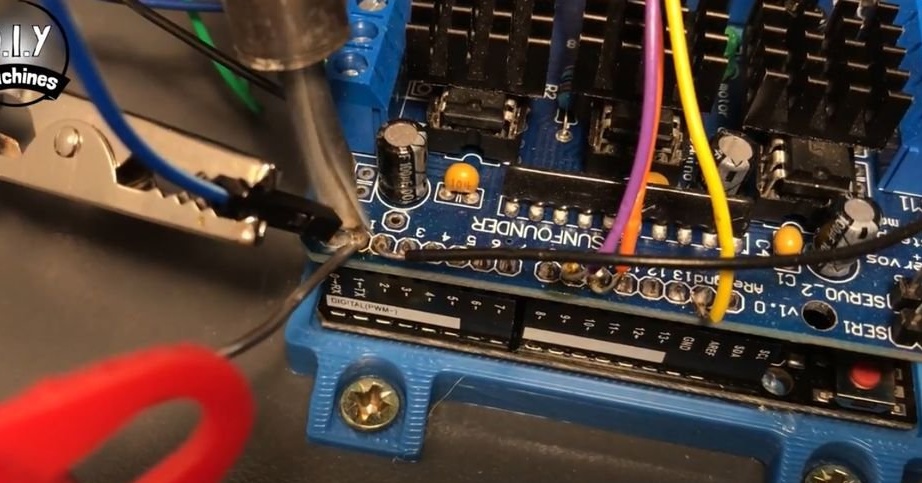
Seitsemäs vaihe: kytkin
Moottorin kiinnityksen viereen porataan toinen 16 mm reikä. Lisää holkki siihen. Kiinnittää perävaunun kiinnikkeeseen. Juote sen koskettimiin yhden metrin lanka.

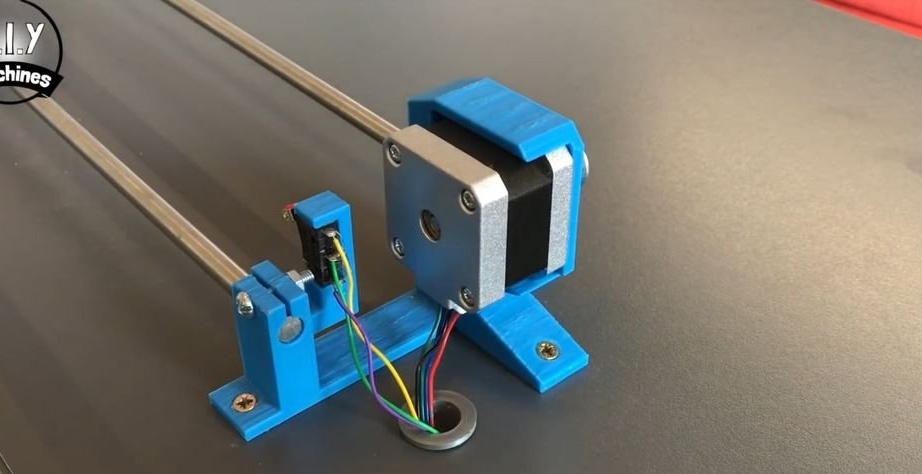
Kahdeksas vaihe: X-akselinen moottori
Varmistaa moottorin asettamisen.

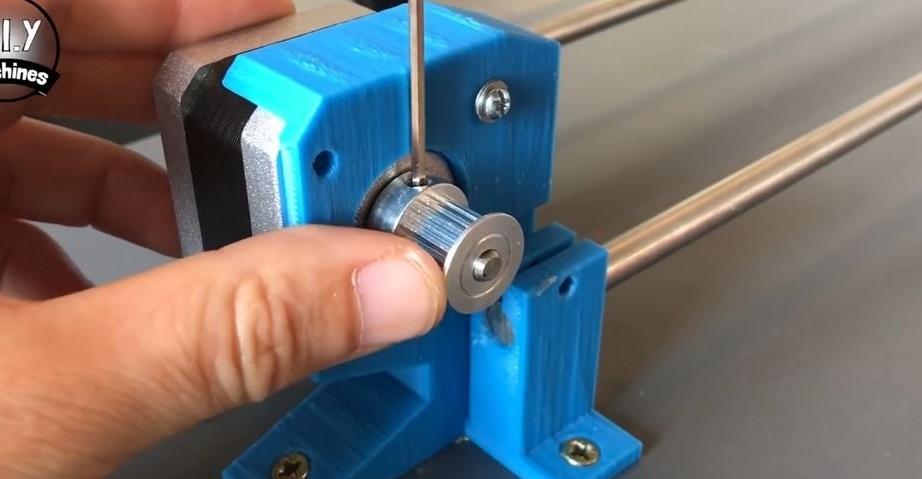
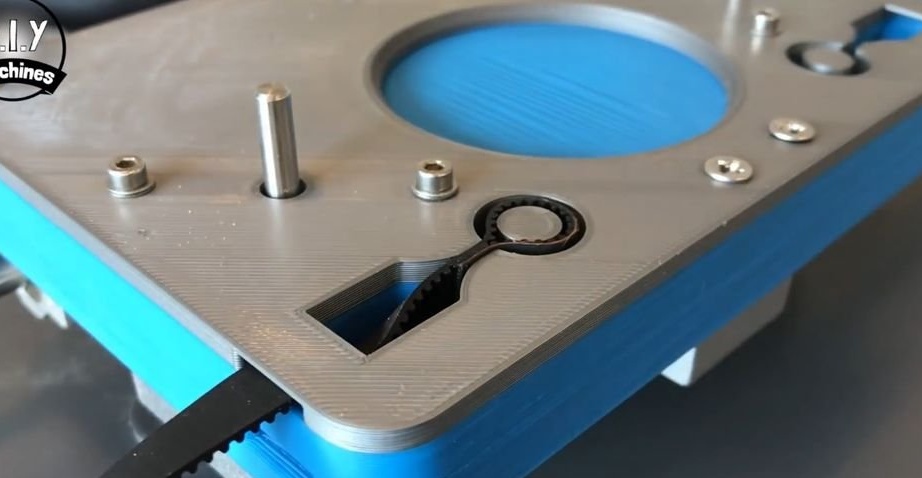
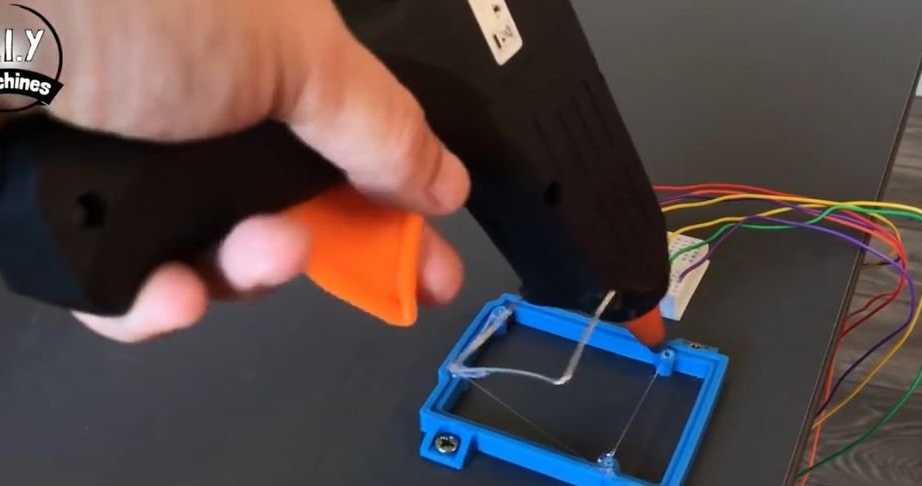
Vaihe yhdeksän: Vyö
Kiinnittää hihnapyörän moottorin akselille. Kiinnittää hihnan pää lavanpidikkeisiin. Vedä hihna hihnapyörän ja kiristimen hihnapyörän läpi. Kiinnittää toinen pää pidikkeisiin. Hihnan kireyttä voidaan tarvittaessa säätää kiristämällä tai ruuvaamalla ruuvi.







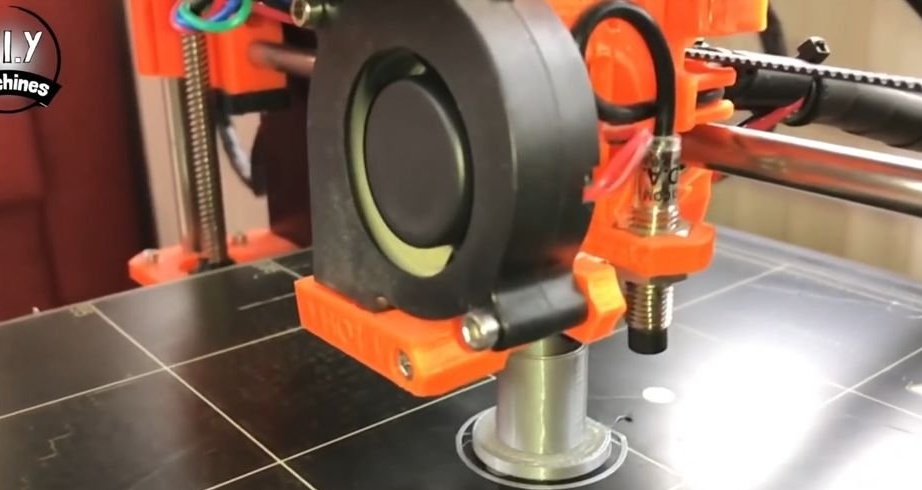
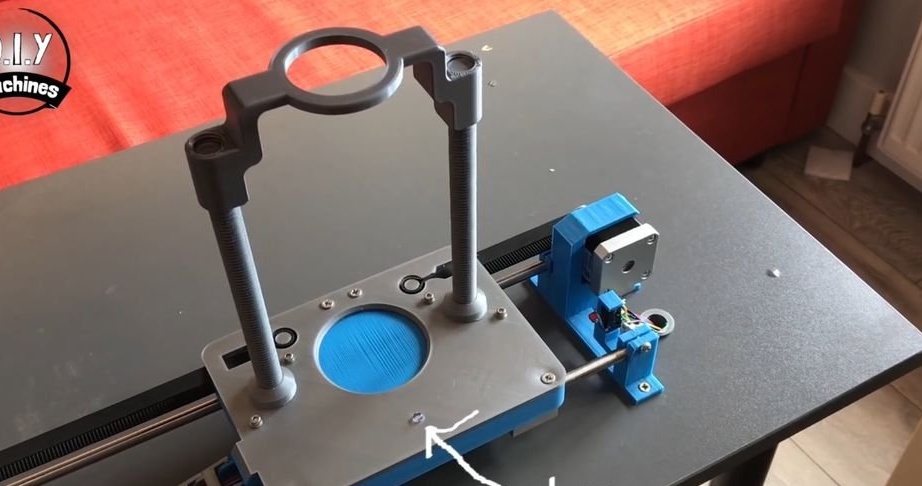
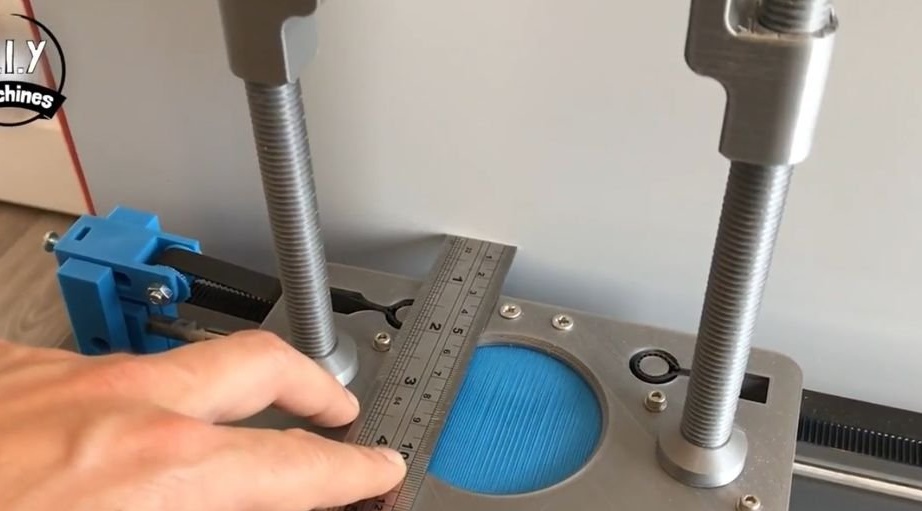
Vaihe kymmenen: Kupin haltija
Tulostaa kaksi kierretankoa main_rod2.3.STL ja pidikkeen Dispenser_Paddle_V2.STL. Kiinnitetään alustalle.



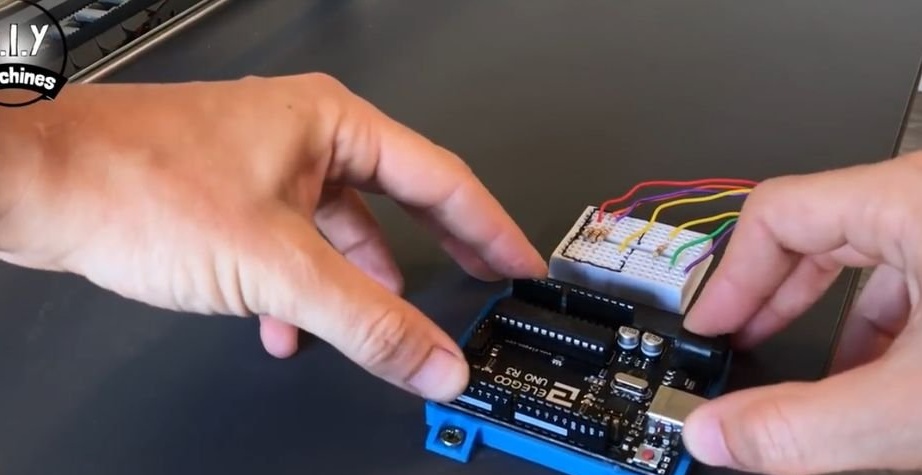
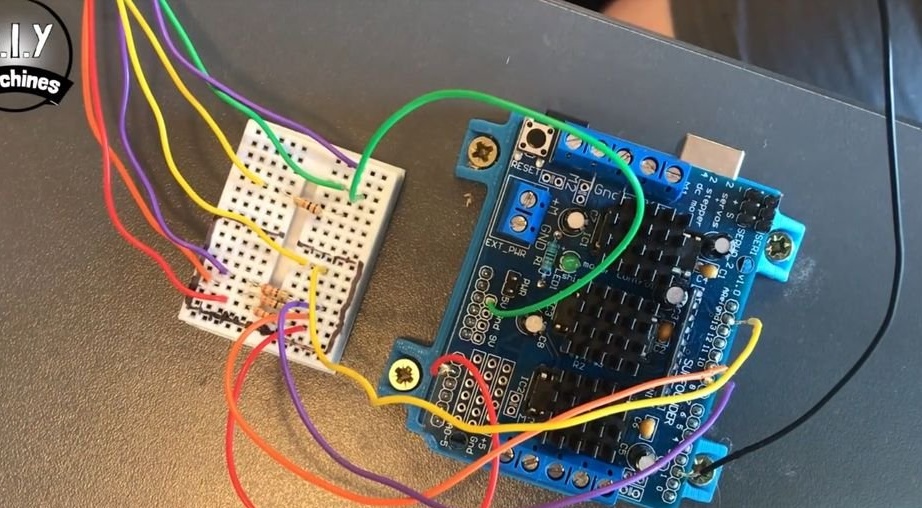
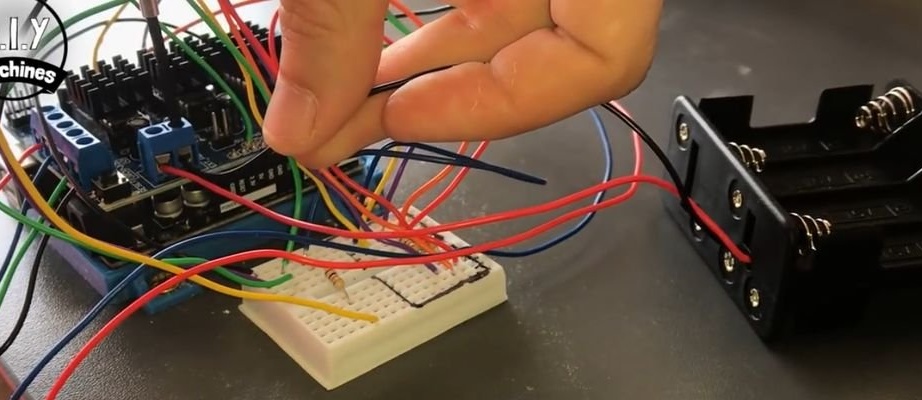
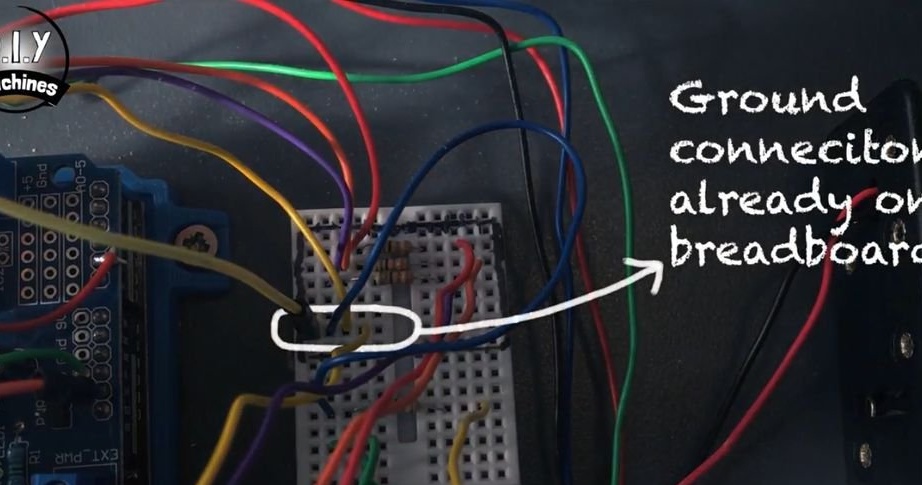
Vaihe yksitoista: osoitin, perävaunu, leipälauta
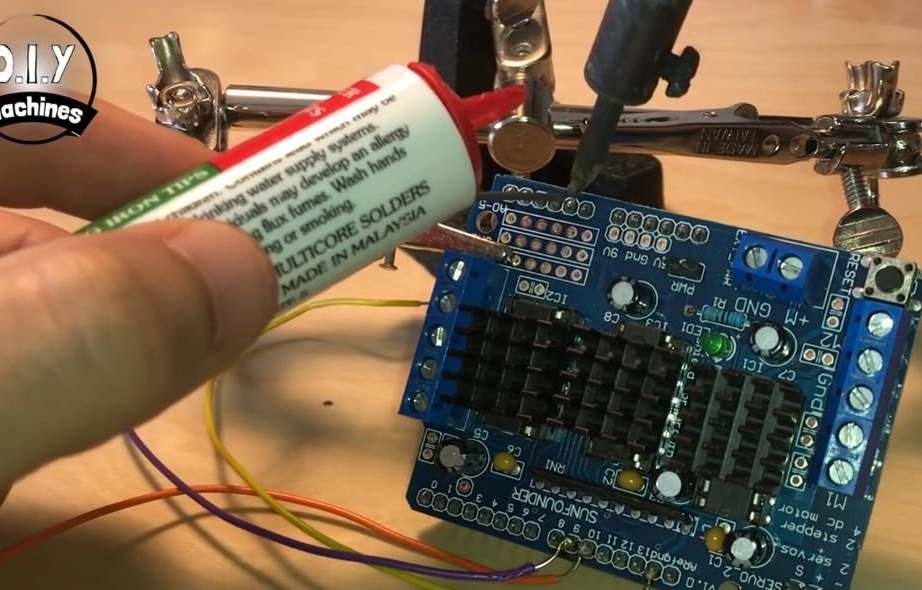
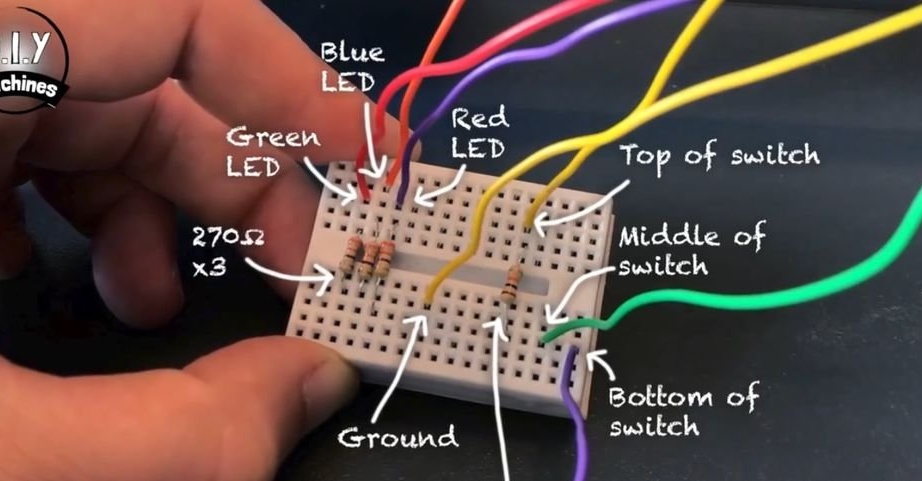
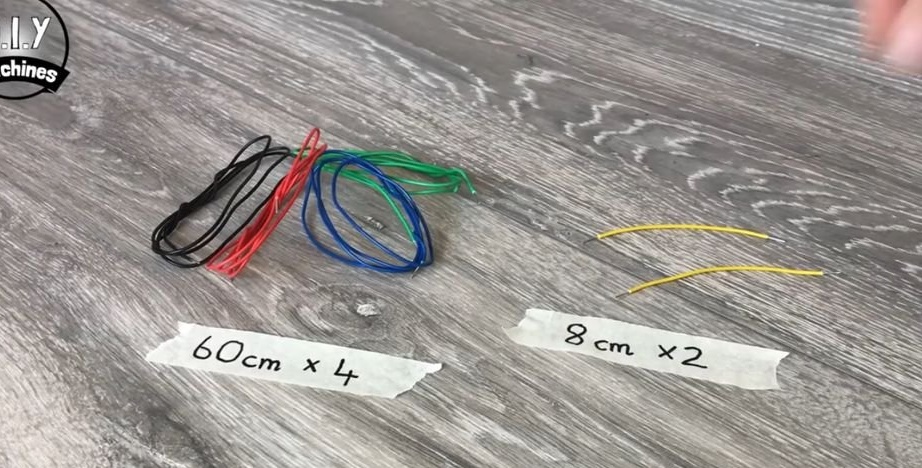
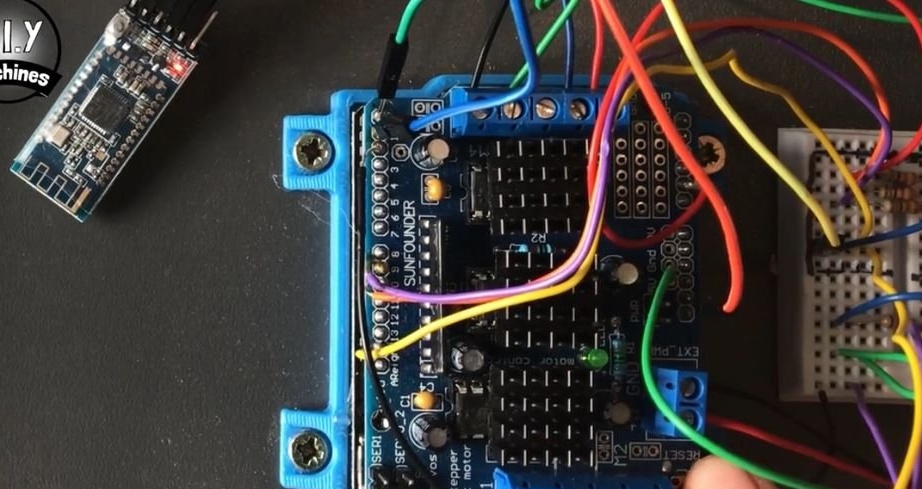
RGB LED, siinä on neljä jalkaa. Yksi jalka on yleinen ja kolme värillistä. Päällikkö ottaa vielä neljä johtoa, joista jokainen on noin 15 cm pitkä, ja juottaa ne seuraavasti (LED-hehku värillä) moottoriohjainmoduuliin:
Punainen napaan D9
Sininen kiinnittää D10
Vihreä nastaan A1
Katodi GND-nastaan.
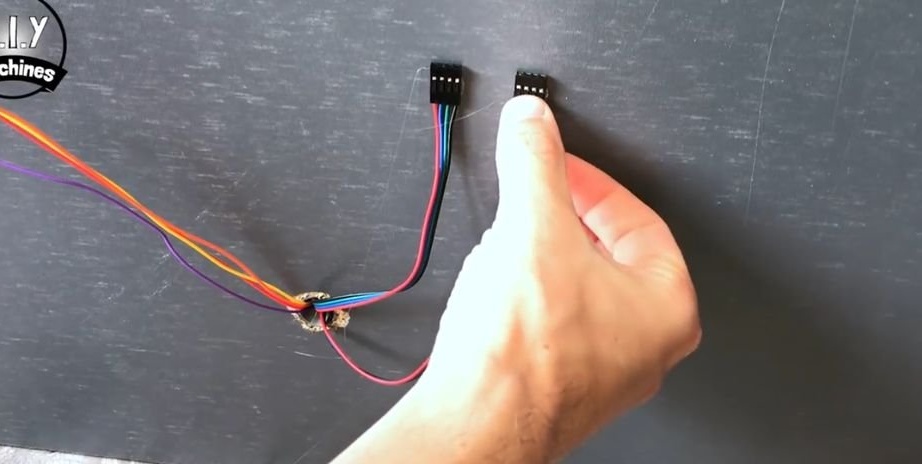
Se yhdistää perävaunun: ylempi kosketin on GND, keskikosketin on 5 V, alempi kosketin on lähtö nro 2.
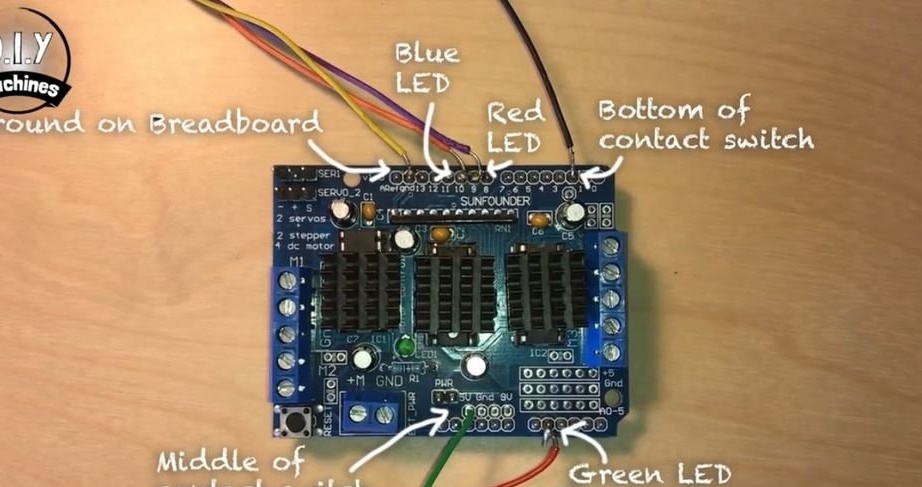
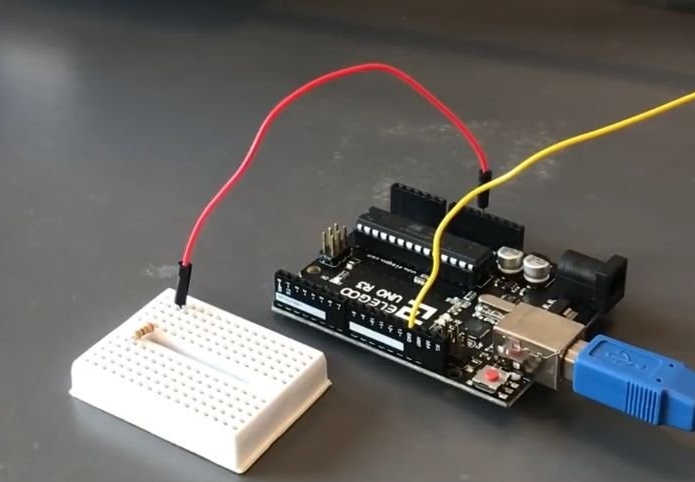
Seuraava kiinnittää kaiken leipälaudalle (katso kuva). Kiinnittää pöydän pöydälle.
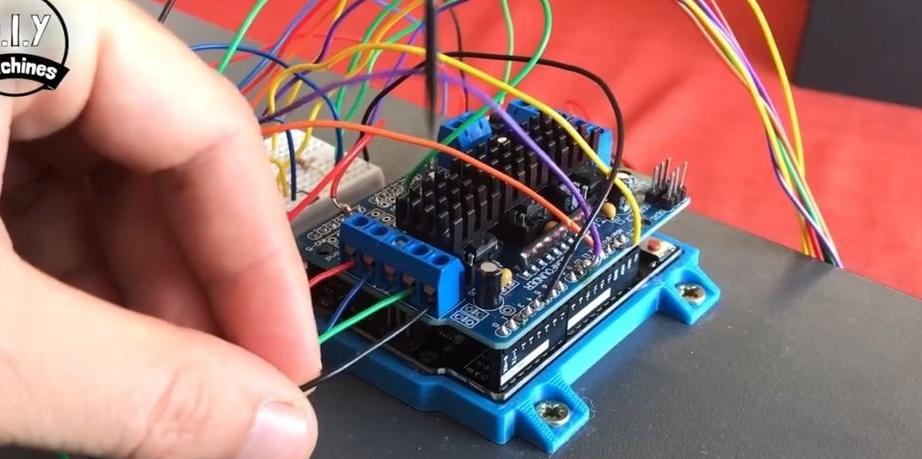
Vaihe kaksitoista: Arduino
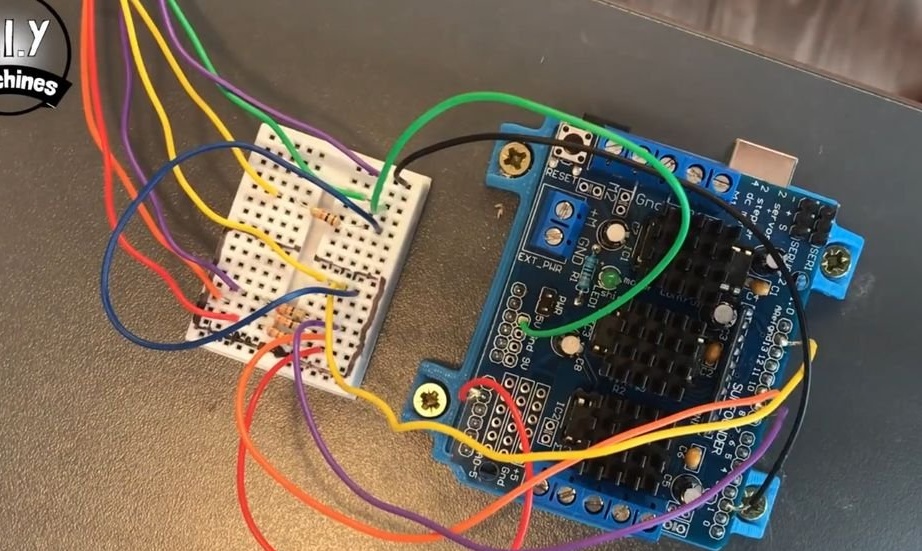
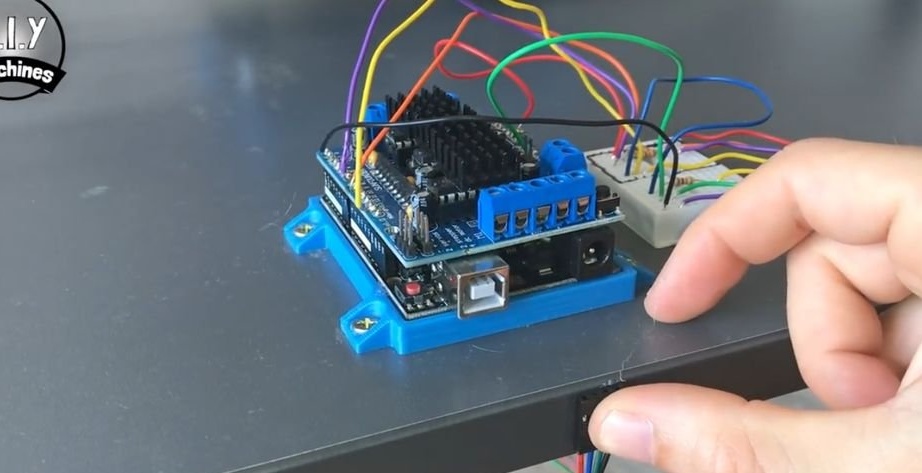
Tulostaa Arduinon kiinnityslevyn. Kiinnittää lautasen pöydälle. Kiinnittyy Arduinon lautaselle. Asentaa moottorin ohjainmoduulin Arduinolle.
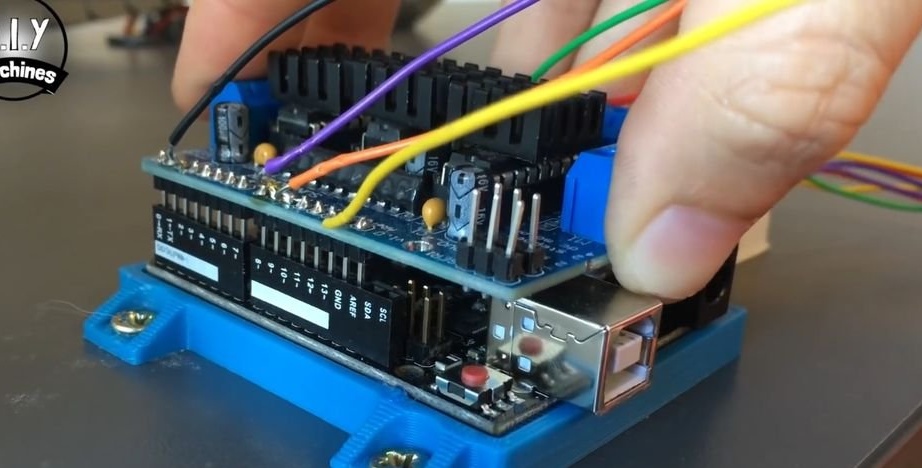
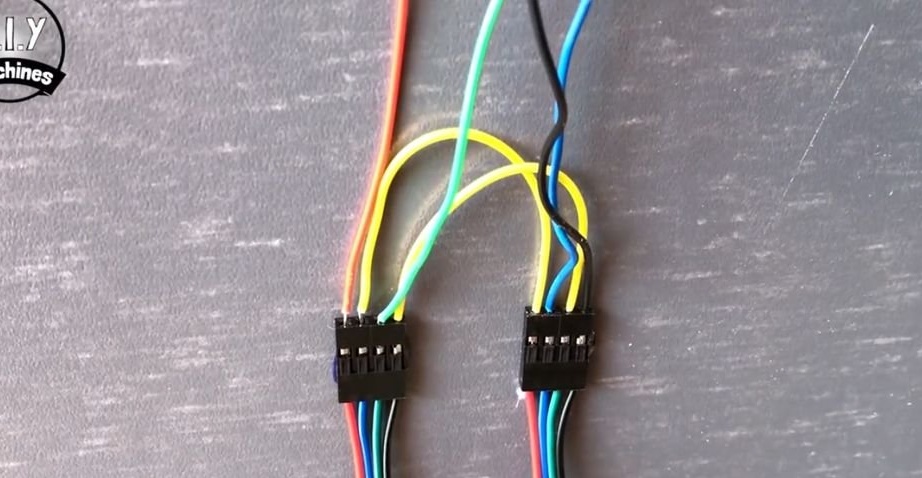
Kytkee johtimet ohjaimesta leipätauluun, kuten kuvassa.
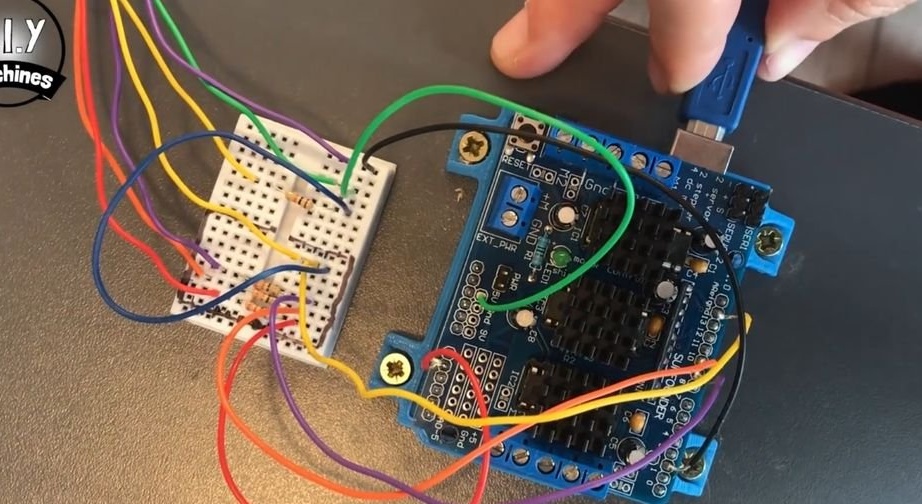
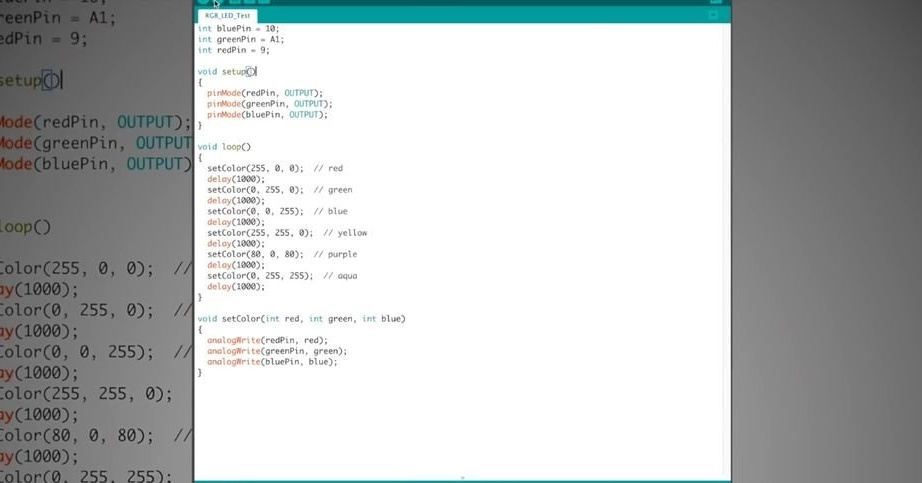
Kolmetoista vaihe: Lataa koodi
Yhdistää Arduinon tietokoneeseen ja lataa koodin. Koodi löytyy täällä.
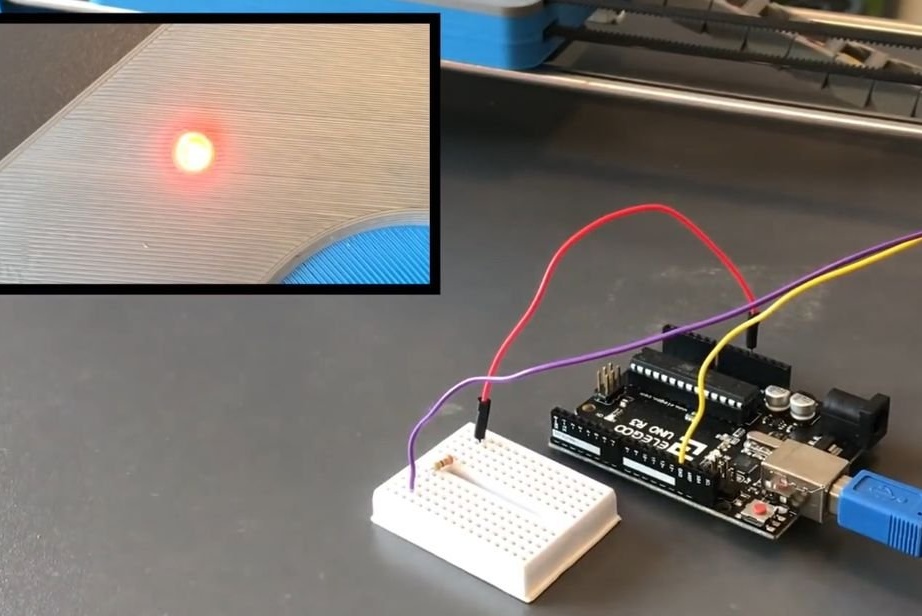
Suorittaa LED-testikoodin. LEDin tulisi palaa eri väreissä.
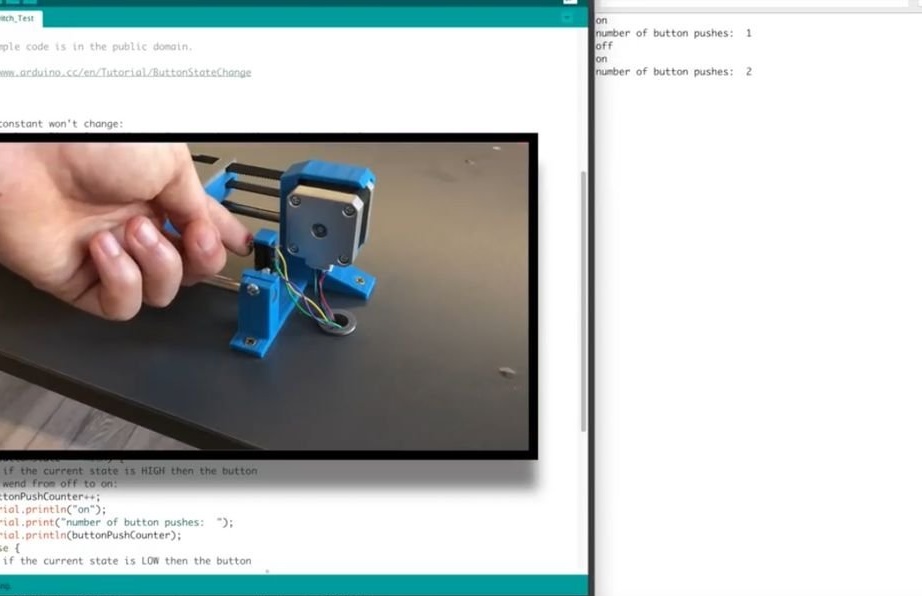
Seuraava ladattava komentosarja on "Contact_switch_test". Heti kun se on ladattu, jokaisen rajakytkimen painikkeen tulisi näkyä näytössä.

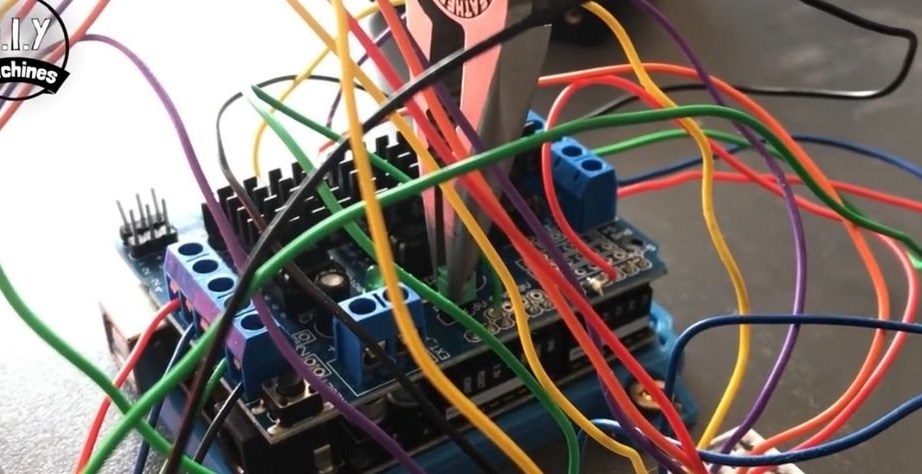
Vaihe neljätoista: X- ja Z-moottorien kytkeminen
Kiinnittää moottorista X tuleva liitin pöydällä olevan leipälevyn kautta. Yhdistetään ohjainjohtoihin.
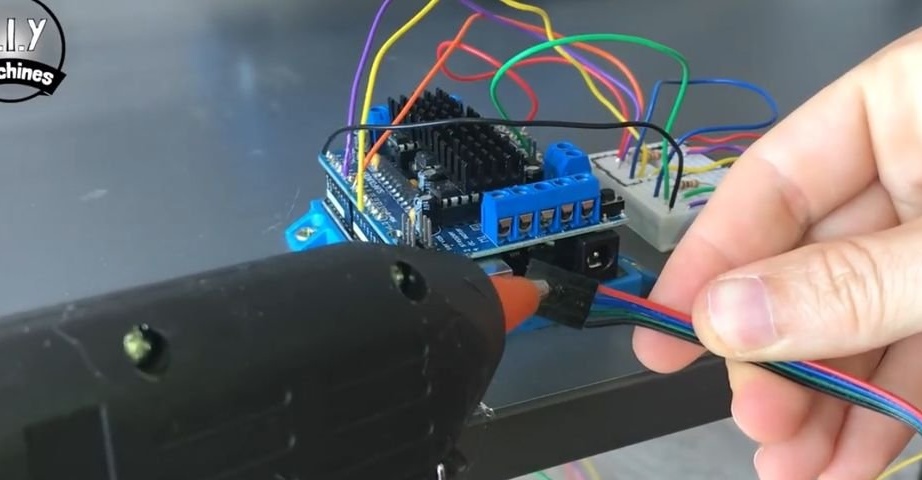
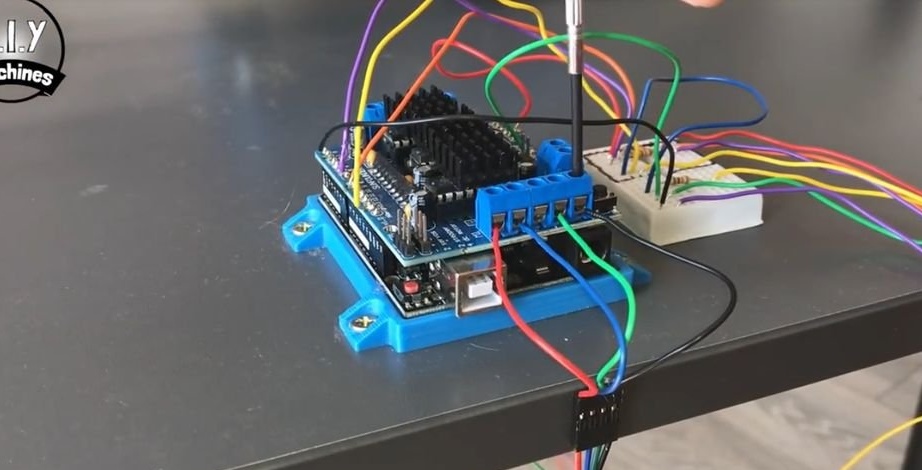
Kytkee Z-akseliset askelmoottorit.
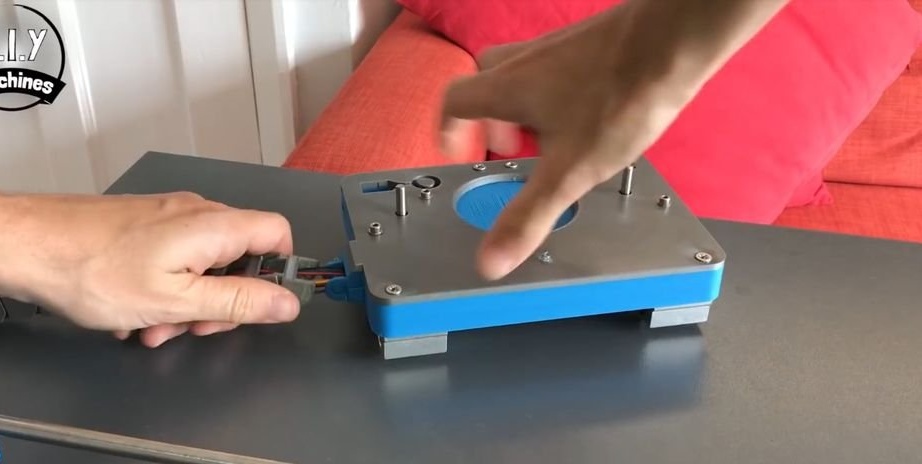
Vaihe 15: Paristolokero
Poistaa moduulin hyppykytkimen. Yhdistää paristokotelon.
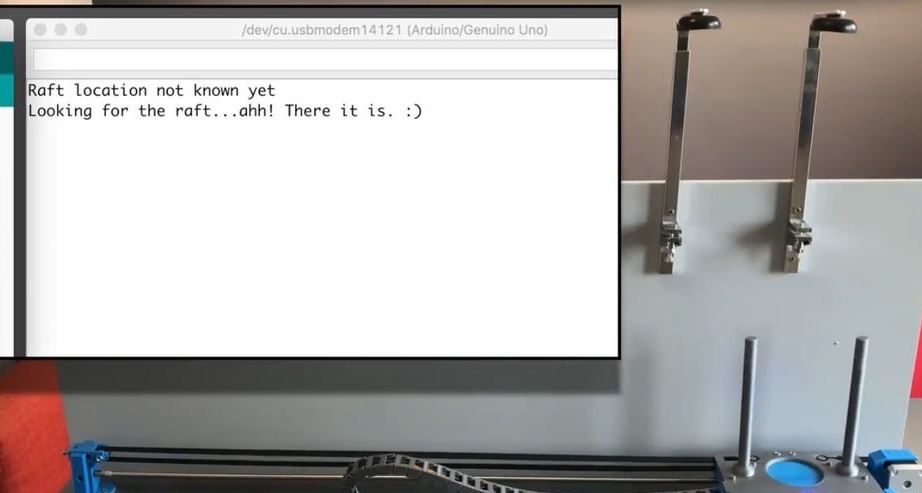
Nyt voit suorittaa testin 1. Punaisen LEDin tulisi palaa ja alustan tulisi saavuttaa rajakytkin. Sitten LED-valo muuttuu vihreäksi.
Vaihe kuusitoista: pullonpitimet
Kiinnikkeiden avulla kiinnitetään MDF: n takaseinä.




Siirrä laitetta edelleen 1 cm päässä rajakytkimestä. Kohdistaa lasinpidikkeen ja kiinnittää pullonpidikkeen annostelijaan (valitettavasti päällikkö ei antanut kuvausta pidikkeen valmistuksesta tai ostosta). Seuraava. pidikkeet kiinnitetään 12 cm välein.



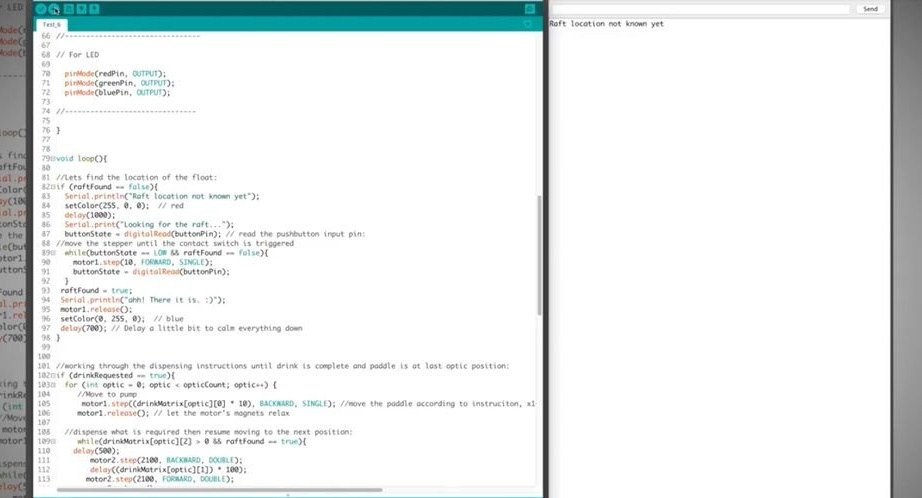
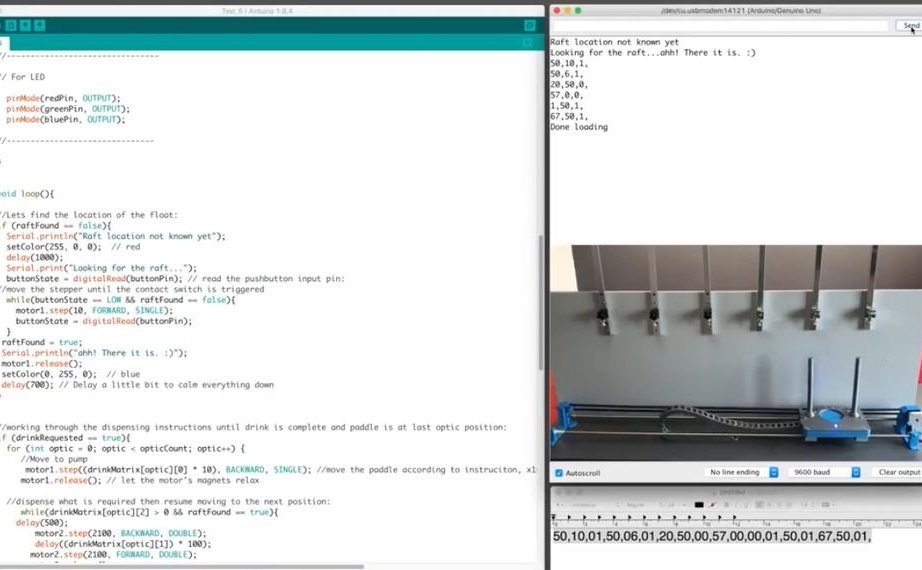
Vaihe seitsemäntoista: koodi, kalibrointi, testi
Lataa pääkoodin https://www.thingiverse.com/thing:2478890
Seuraavat arvot asetetaan asetuksessa: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Päälliköllä on kuusi annostelijaa. Asetuksissa on kuusi kolmen ryhmän ryhmää, joissa ensimmäinen numero on etäisyys rajakytkimestä, ensimmäinen annostelija, toinen annostelija jne., Toinen numero on aika, jolloin juoma kaadetaan lasiin, kolmas on kaatamisen määrä. Kaikkia näitä arvoja voidaan muuttaa tarpeen mukaan.


Ensimmäinen laitteen valmistama juoma oli gin ja cola. Pullon paineen tasaamiseksi koolalla on tehtävä reikä. Sitten ohjattu toiminto asetti tarvittavat parametrit.



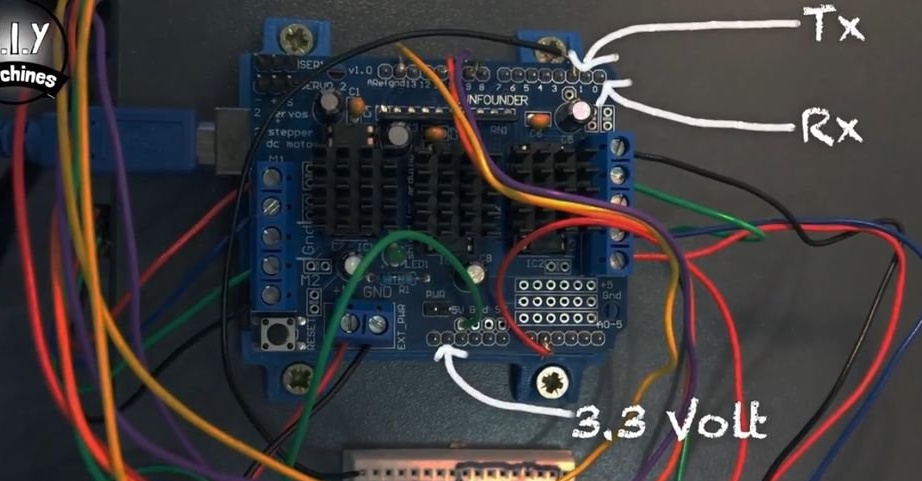
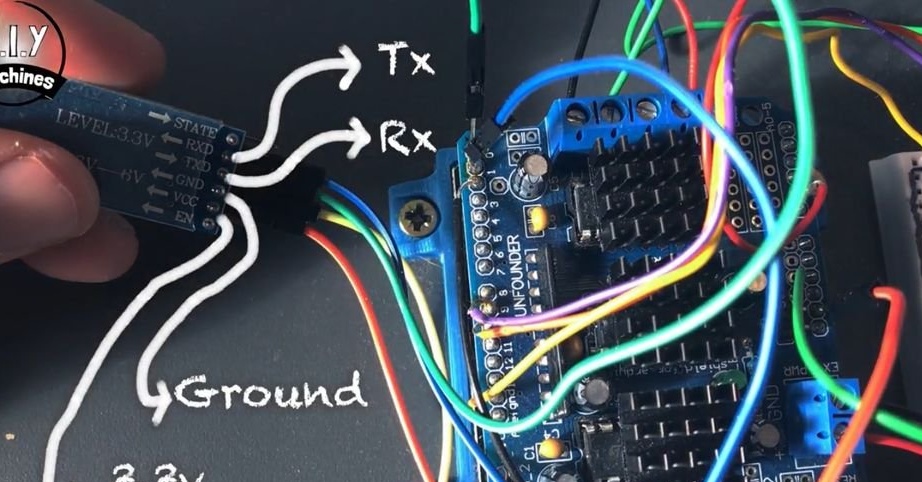
Vaihe kahdeksantoista: bluetooth-moduuli
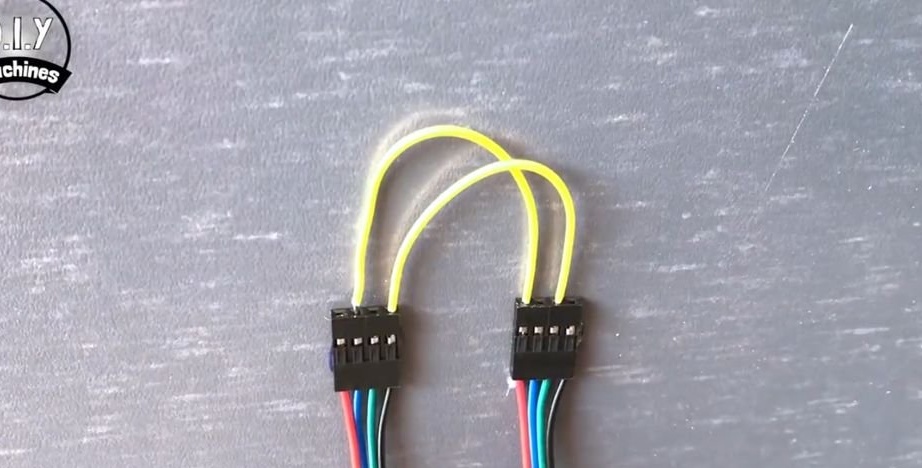
Baarimestarin ohjaamiseksi laitteesta päällikkö asensi Bluetooth-moduulin. Moduuli kytkeytyy seuraavasti.
HM10 -> Arduino-kilpi
RXD ------> TX
TXD -------> RX
GND ------> Maa
VCC ------> 3,3 V

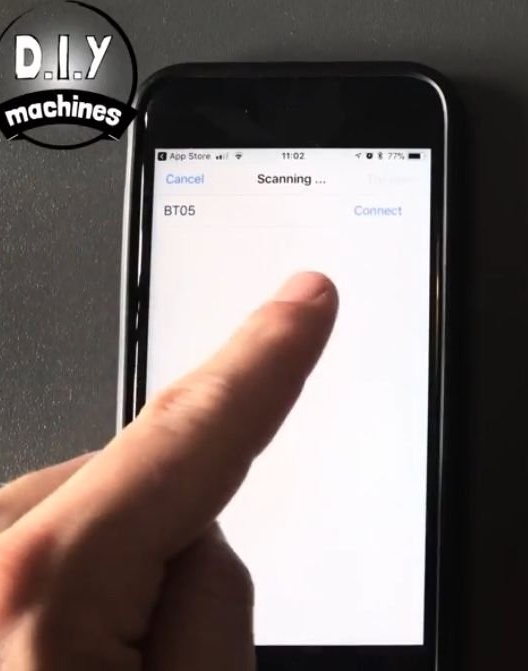
Päälliköllä on älypuhelin, jossa on iOS. Tätä järjestelmää varten hän lataa ”hm10 bluetooth serial lite” sovelluskaupasta. Sitten se muodostaa yhteydet ja syöttää asetukset.

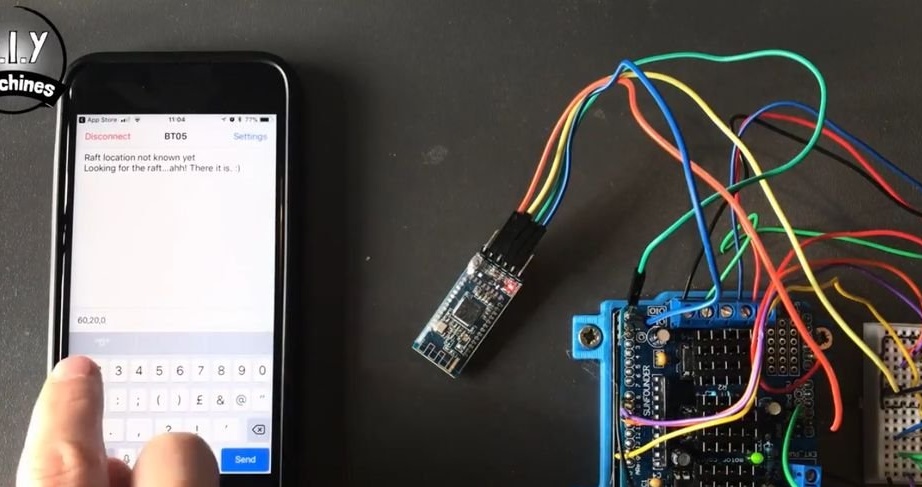
Kaikki on valmis ja saadaan täydellisempiä tietoja muutamasta videosta.