
Ohjattu toiminto loi laitteen, joka toimii kuin digitaalinen taso + viivain + tuuletin + mittanauha. Laite on tarpeeksi pieni, jotta se mahtuu taskuun, ja sen akku latautuu helposti puhelinlaturilla.
Tämä laite käyttää kiihtyvyysmittaria ja gyroskooppianturia mittaamaan tason ja kulman tarkasti, IR-anturia lineaarisen pituuden kosketuksettomaan mittaamiseen 4–30 cm, anturia pyörällä, joka voidaan vierittää kaarevaa pintaa pitkin, tai kaarevaa viivaa kohteen pituuden mittaamiseen.
Selaus laitteen tilojen ja toimintojen välillä suoritetaan kosketusnäppäimillä, jotka on merkitty M (tila), U (yksikkö) ja 0 (nolla).
M - valinta mittaustyyppien välillä
U - Voit valita mittayksiköiden mm, cm, tuumaa ja mittari
0 - Palauta mitatut arvot arvoon 0 etäisyyden tai kulman mittauksen jälkeen.
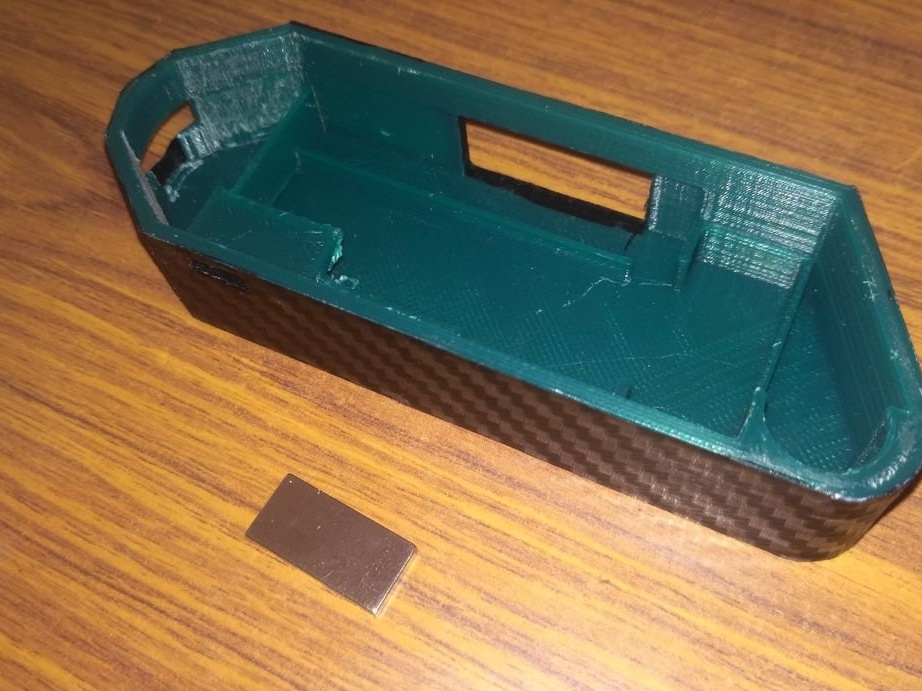
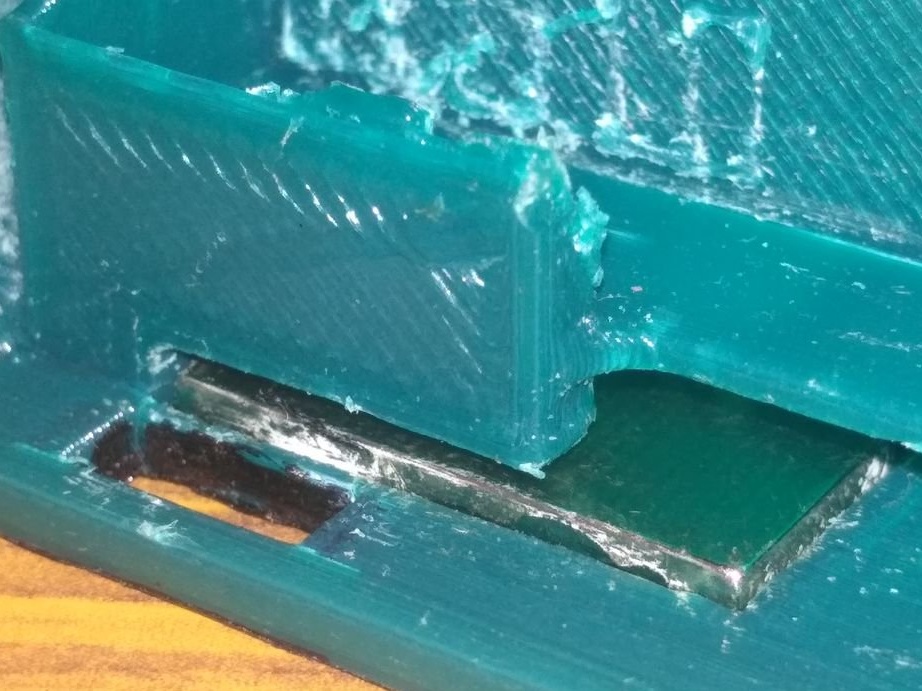
Laitteen pohjaan on rakennettu neodyymimagneetti siten, että se ei luiskahdu eikä liu'u mitattavan metallin pinnalta.
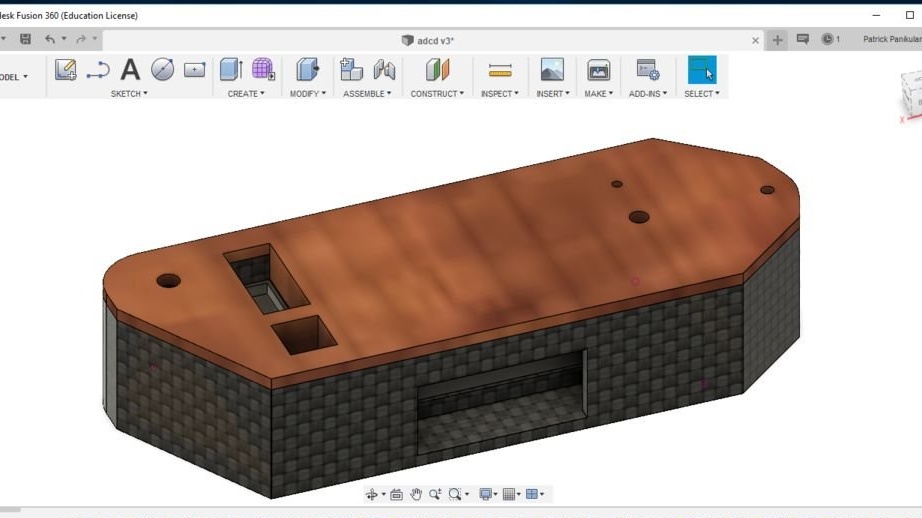
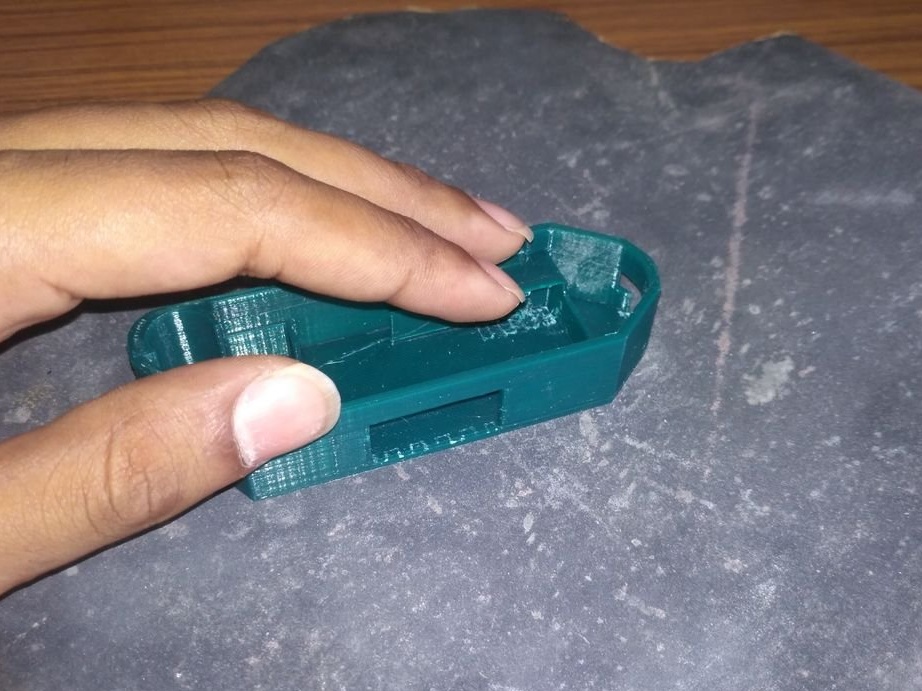
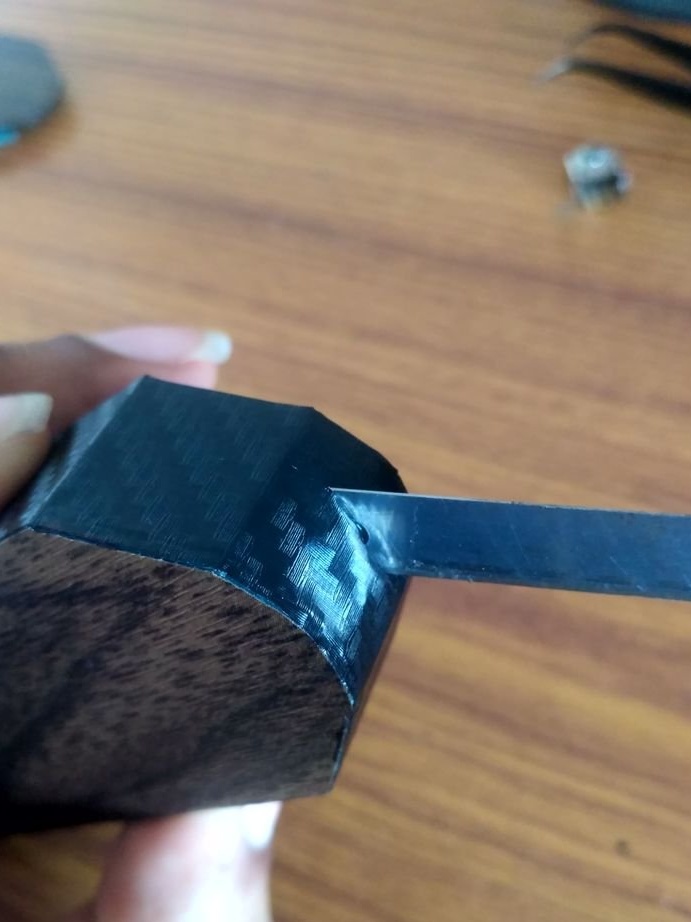
Kotelo on suunniteltu tekemään laitteesta mahdollisimman kompakti.
Katsotaanpa videota, jossa on esimerkkejä laitteen toiminnasta.
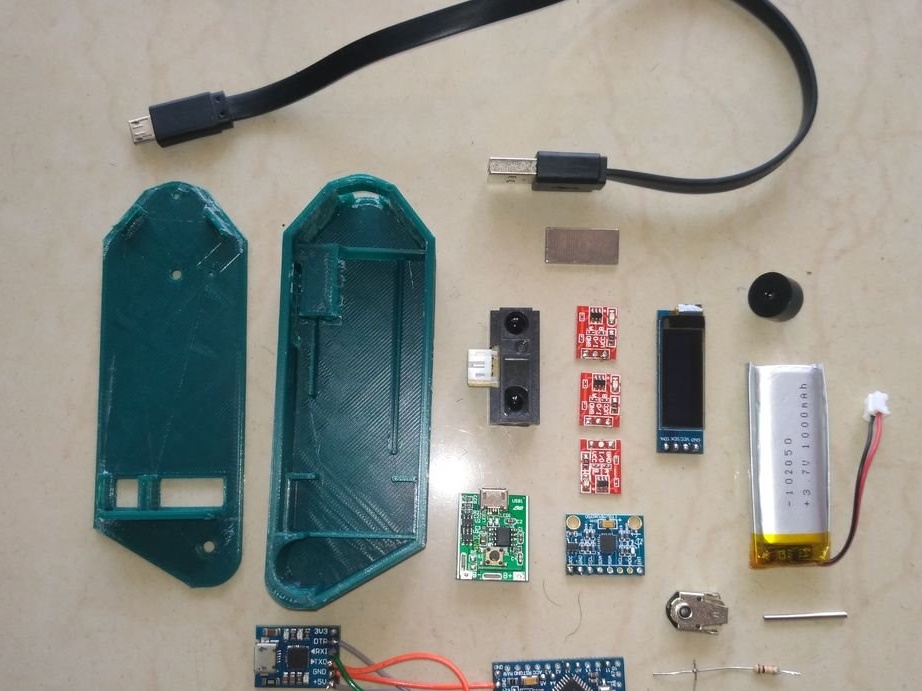
Työkalut ja materiaalit:
-IR etäisyysanturi Sharp GP2Y0A41SK0F;
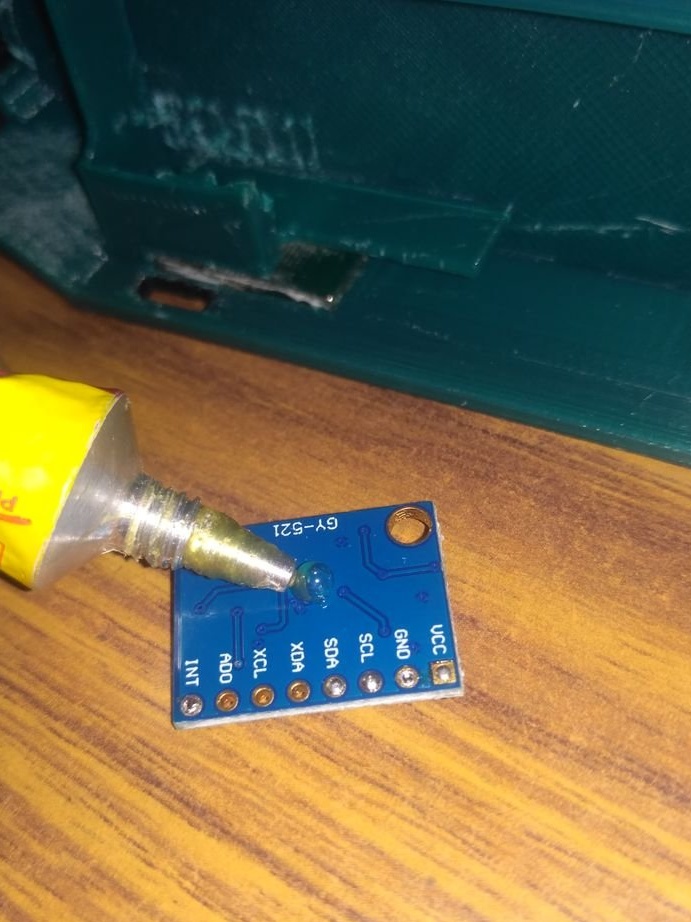
- moduuli MPU6050 kiihtyvyysanturi / gyroskooppi;
-Lataa moduuli;
-Enkoder;
-128 X 32 OLED-näyttö;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
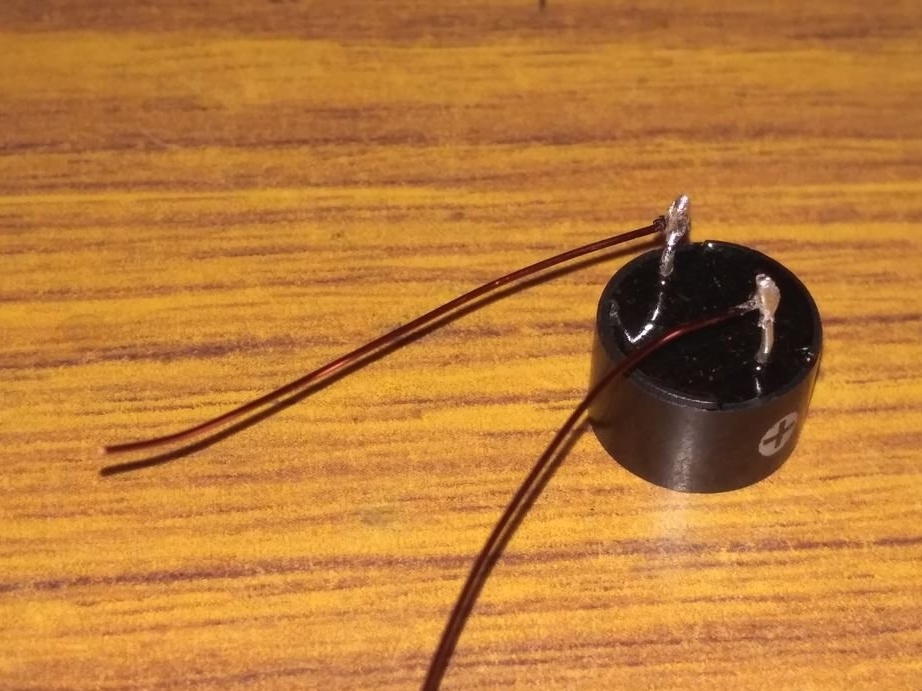
-12 mm summeri;
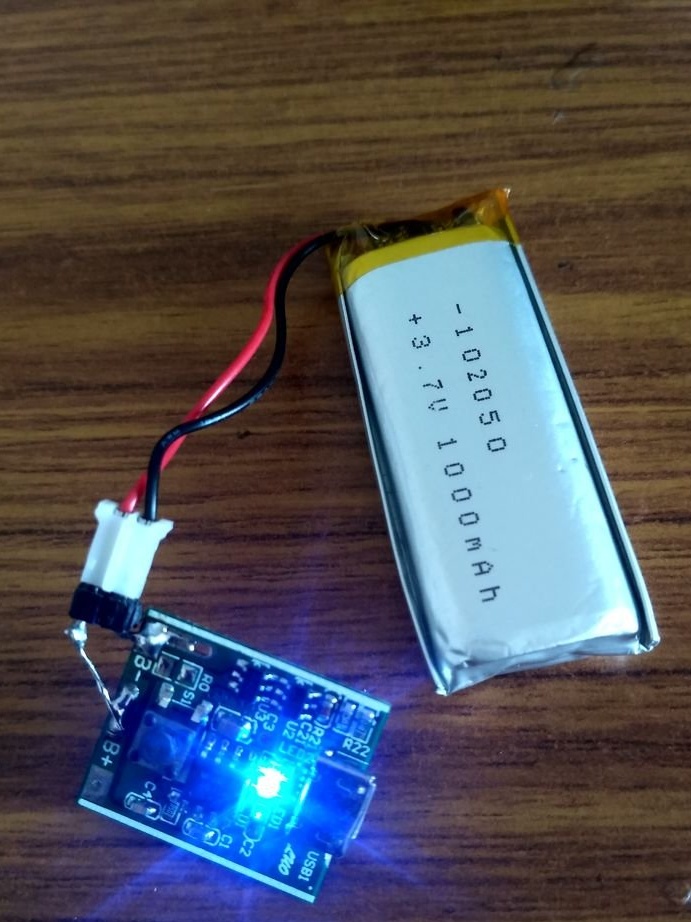
-3,7 V, 1000 mAh litiumpolymeeriparisto;
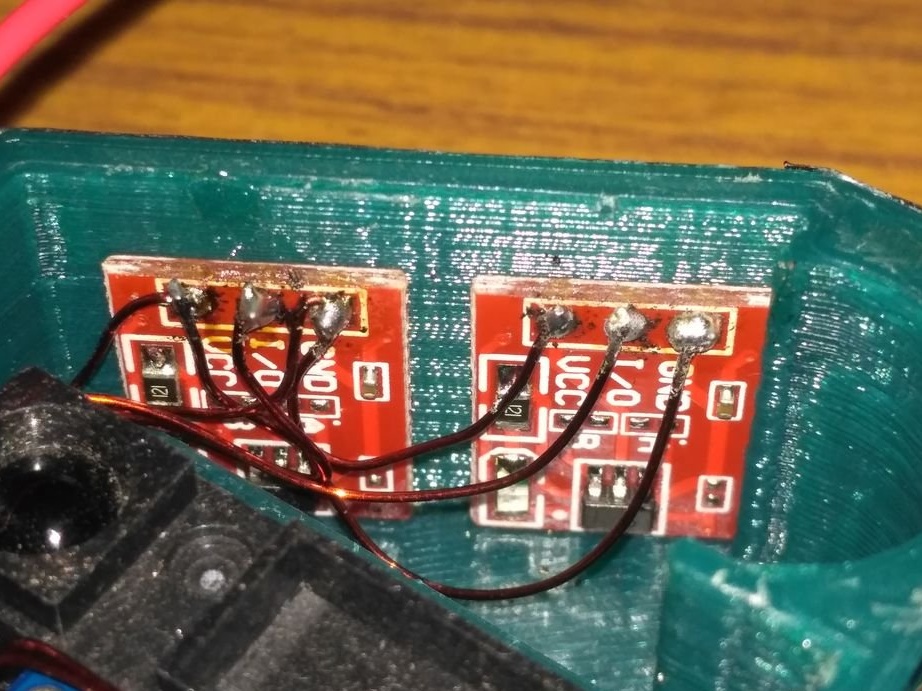
- TTP223 kosketuspainikemoduuli - 3 kpl .;
- Neodyymimagneetti 20x10x2 mm;
-Muunninrajapinta CP2102;
Emaloitu kuparilanka;
-Vastukset 10K - 2 kpl;
- 19 mm pitkä teräsvarsi, halkaisija 2 mm;
-LED LED;
-Vinyyli-elokuva;
- mikro-USB-kaapeli;
- sakset;
-Nozh;
- pinsetit;
-Glue ase;
-Super-liima;
-Juotto tarvikkeet;
-Laserleikkuri;
- 3D-tulostin;
-Kusachki;
-Jätepaperi;

Vaihe yksi: tapaus
Ohjattu toiminto tulostaa ensin tapauksen 3D-tulostimella. Tulostettavat tiedostot voi ladata alla.
BODY.stl
LID.stl
wheel.stl
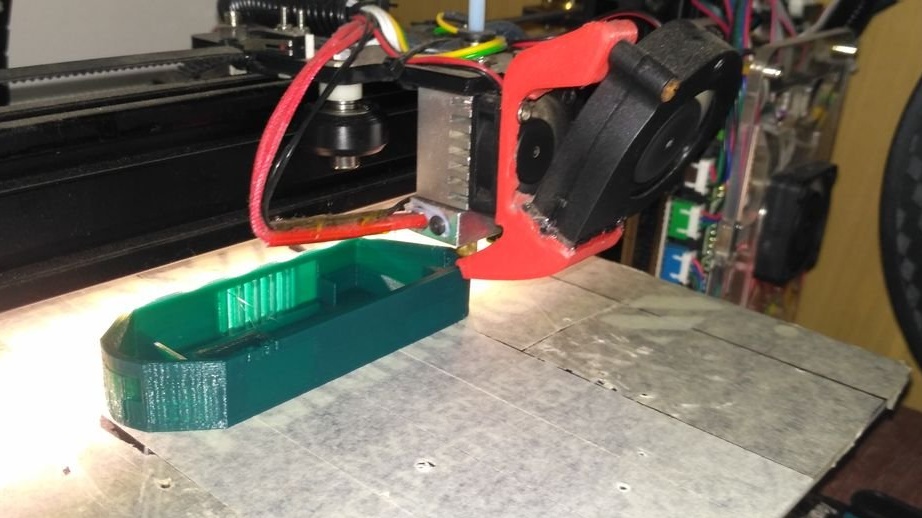
Se liimaa kotelon vinyylikalvolla, hiomalla aiemmin sen pinnan.







Vaihe 2: Kaavio
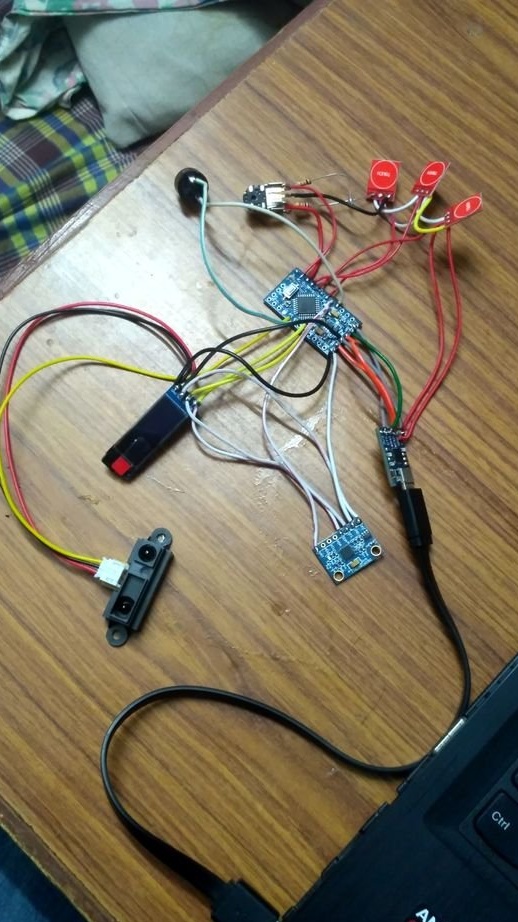
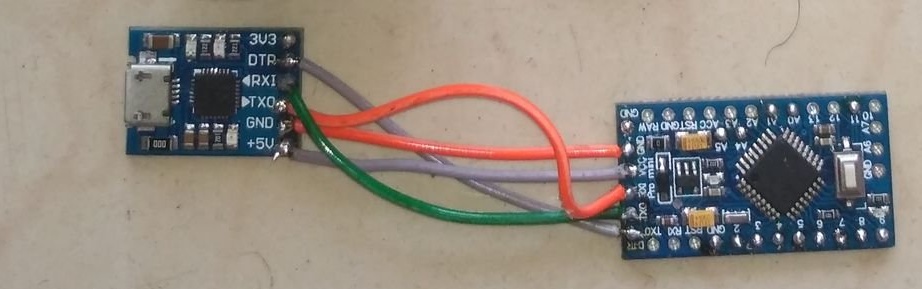
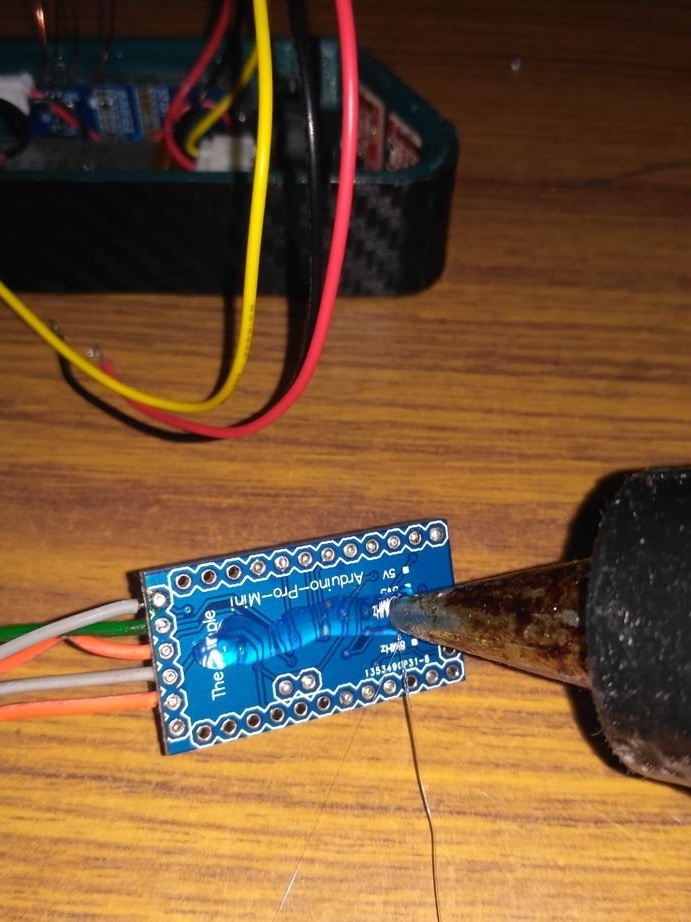
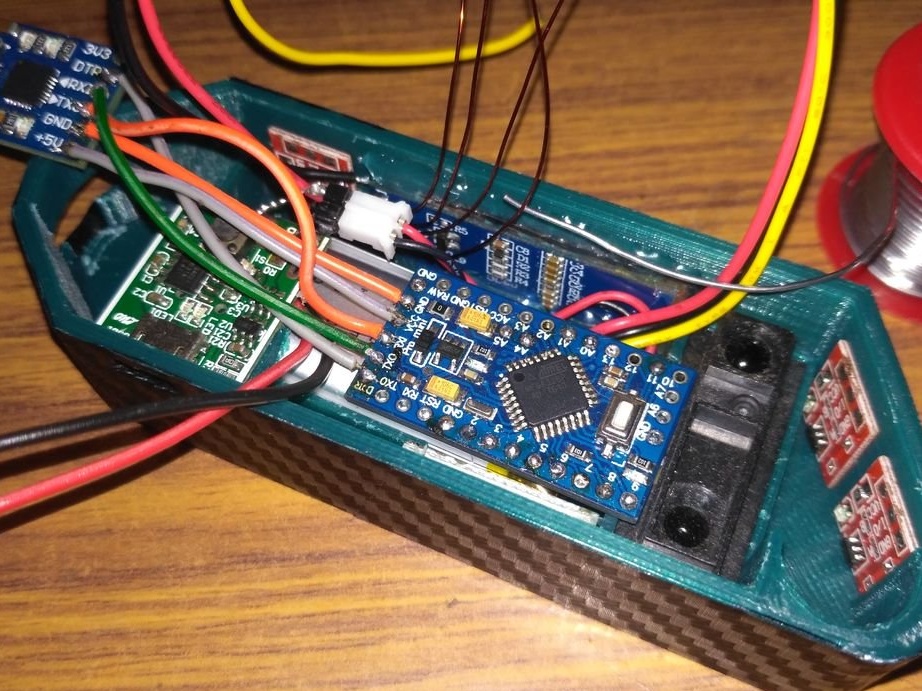
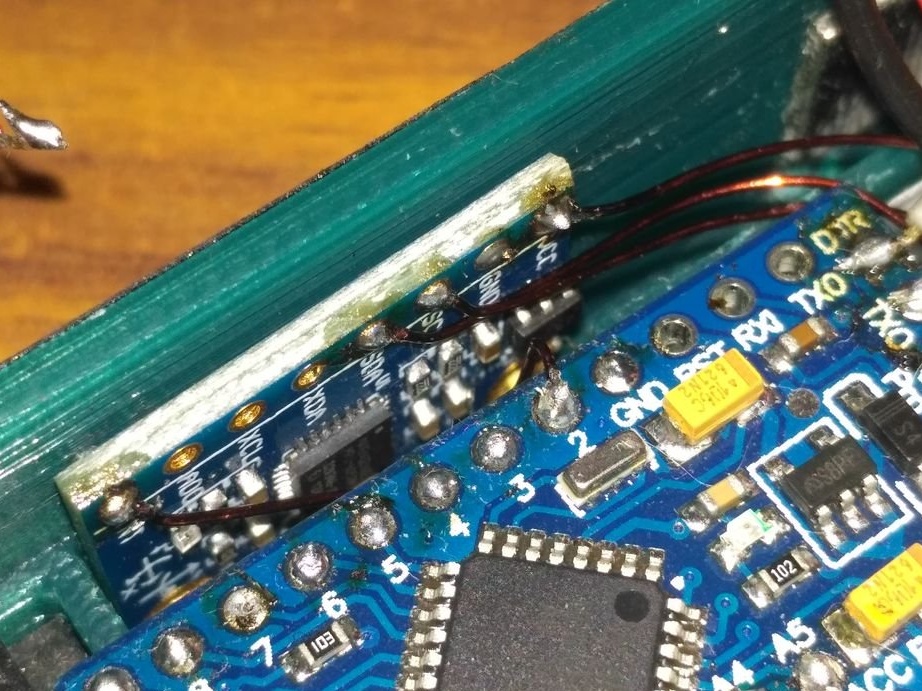
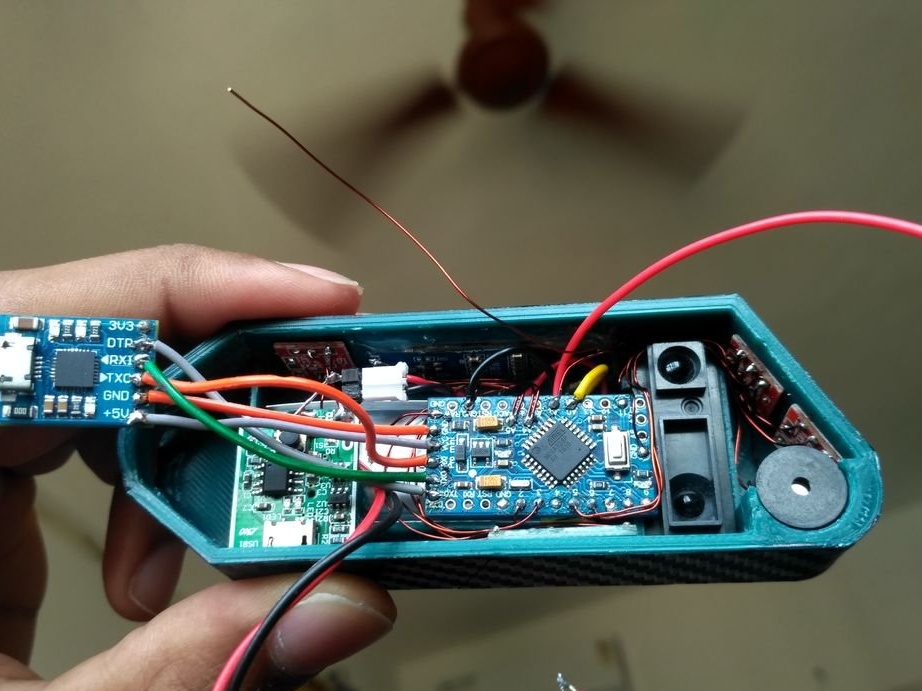
toisin kuin Työläs nano, pro mini ei voi ohjelmoida suoraan kytkemällä USB-kaapeli. Siksi sinun on ensin kytkettävä ulkoinen USB pro minimuuntimeen sen ohjelmoimiseksi. Ensimmäinen kuva osoittaa, kuinka nämä yhteydet tulisi tehdä.
Vcc - 5 V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
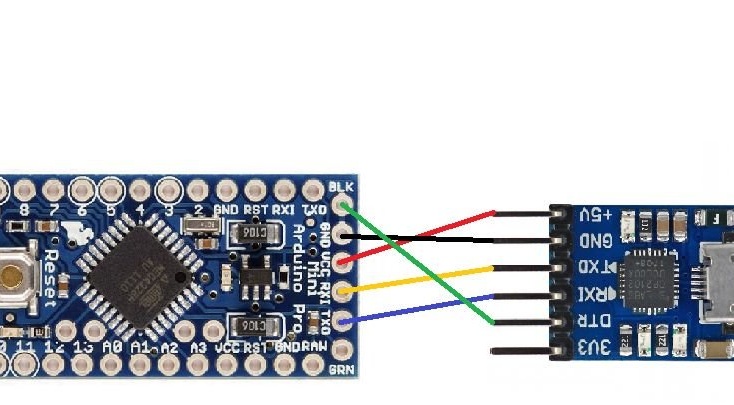
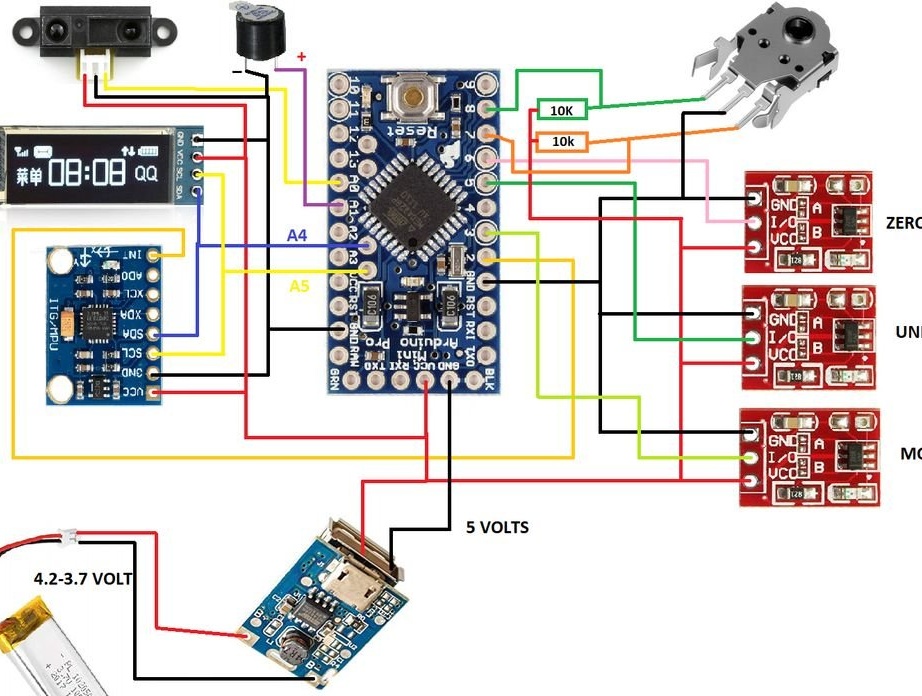
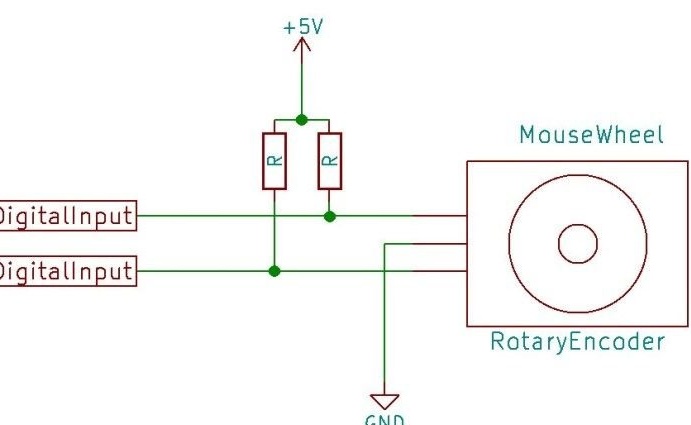
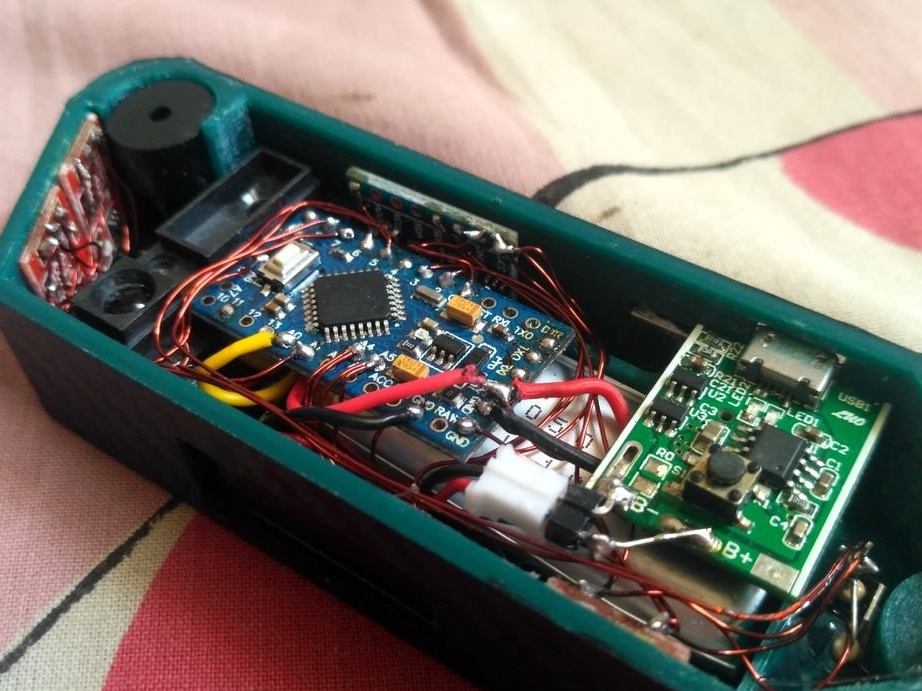
Toinen kuva näyttää tämän projektin täydellisen piirikaavion.
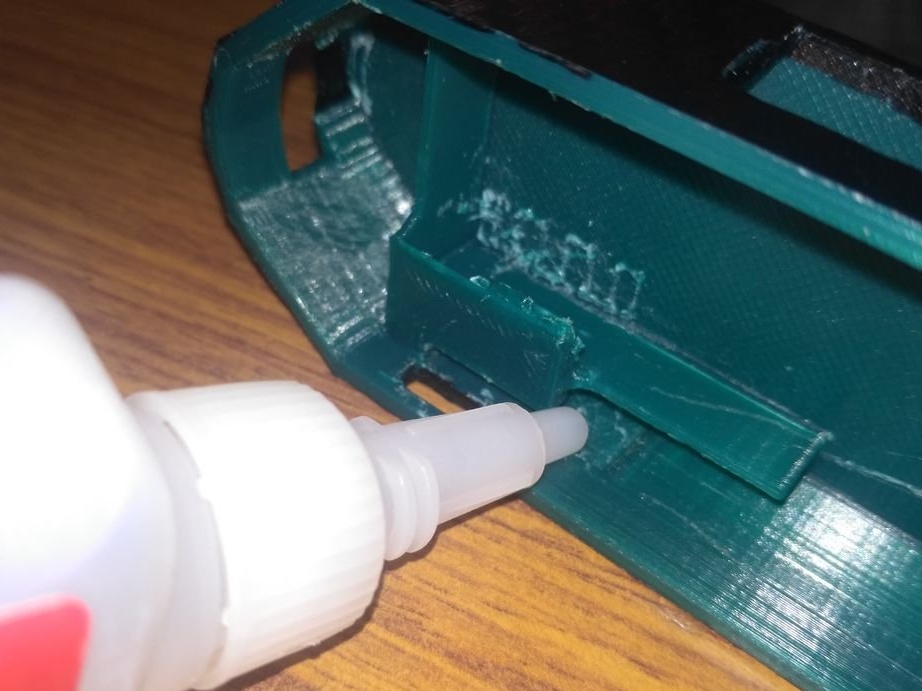
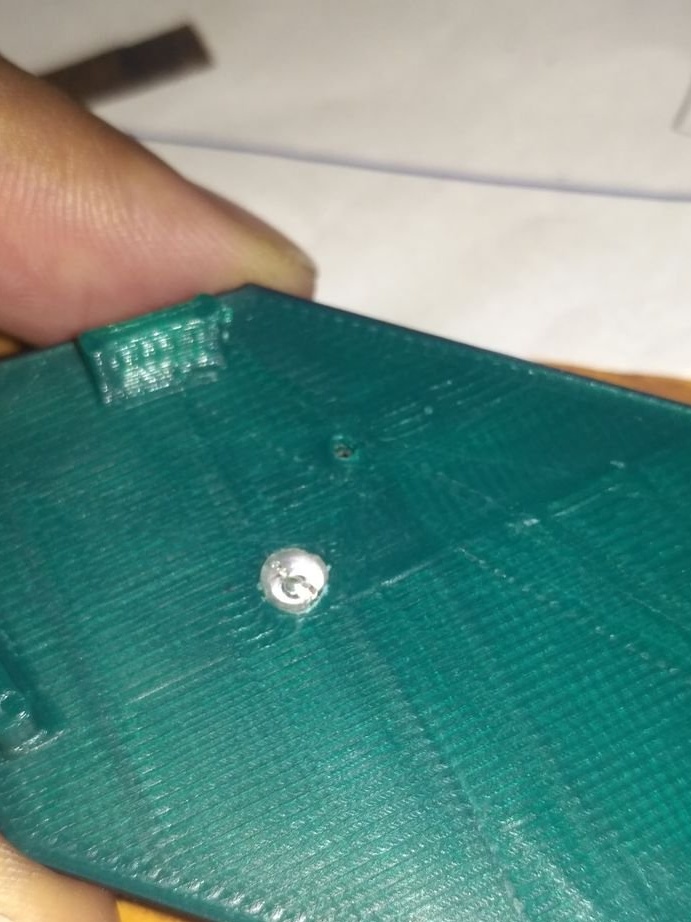
Vaihe kolme: Magneetti
Liimaa magneetin vartaloon.

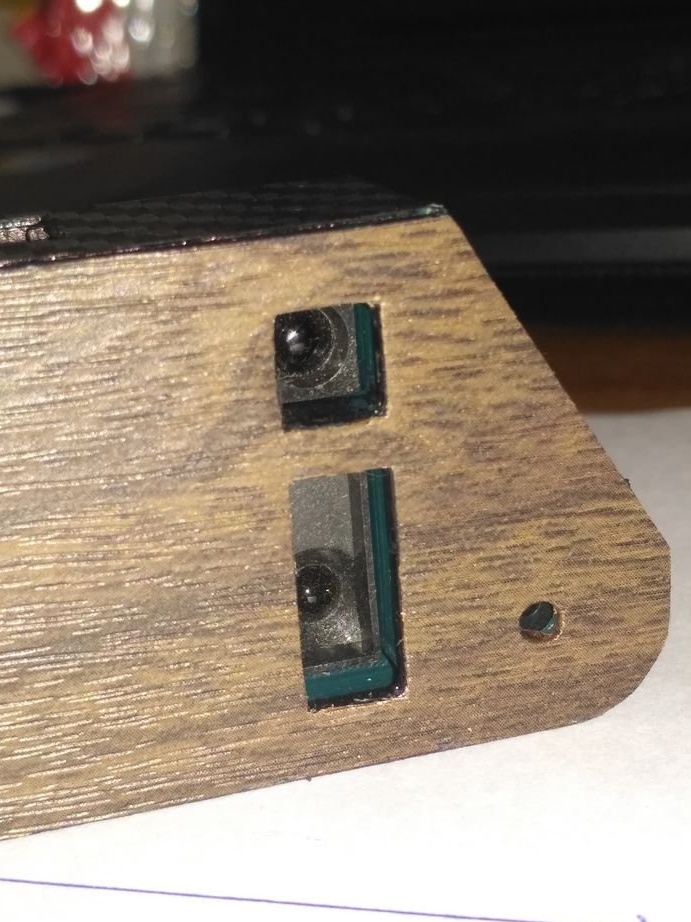
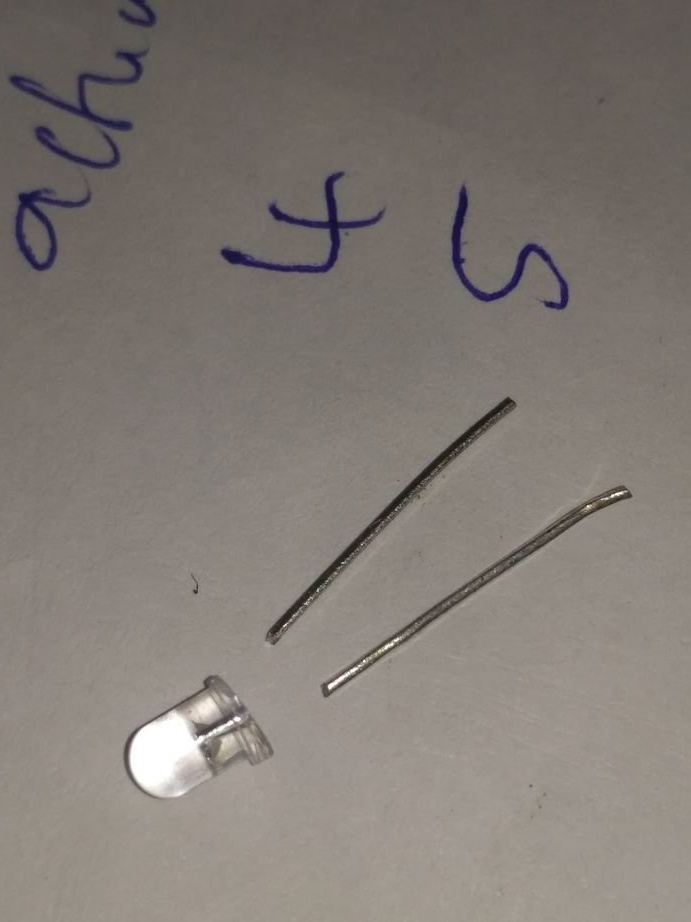
Vaihe neljä: Anturin kohdistus
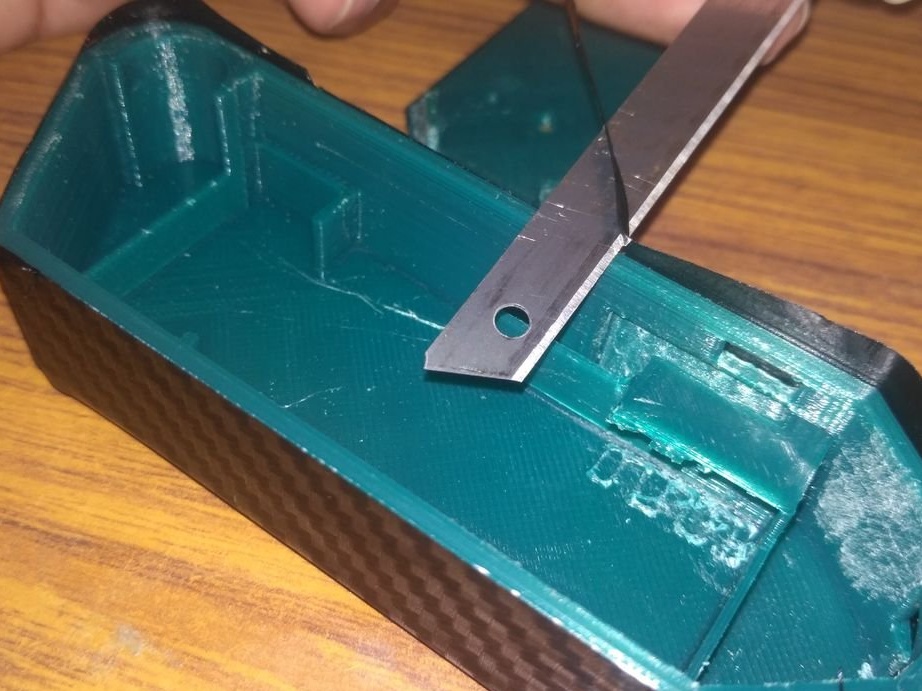
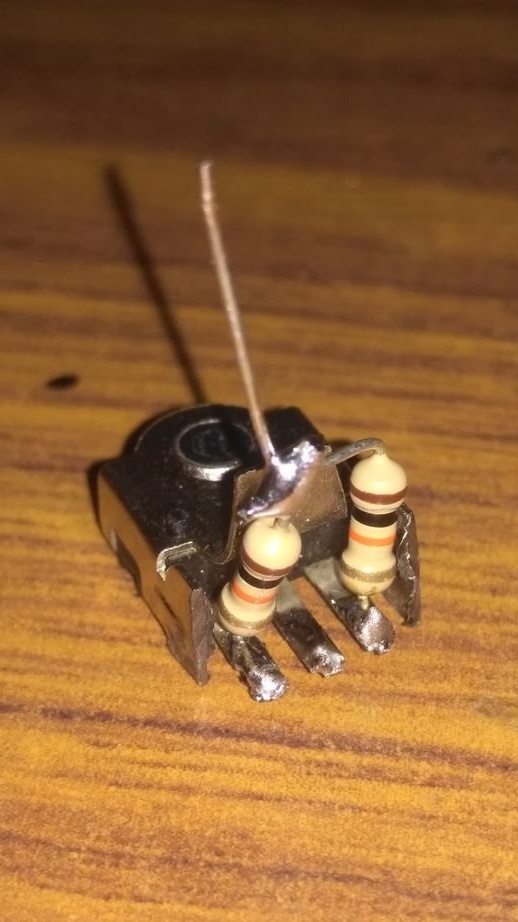
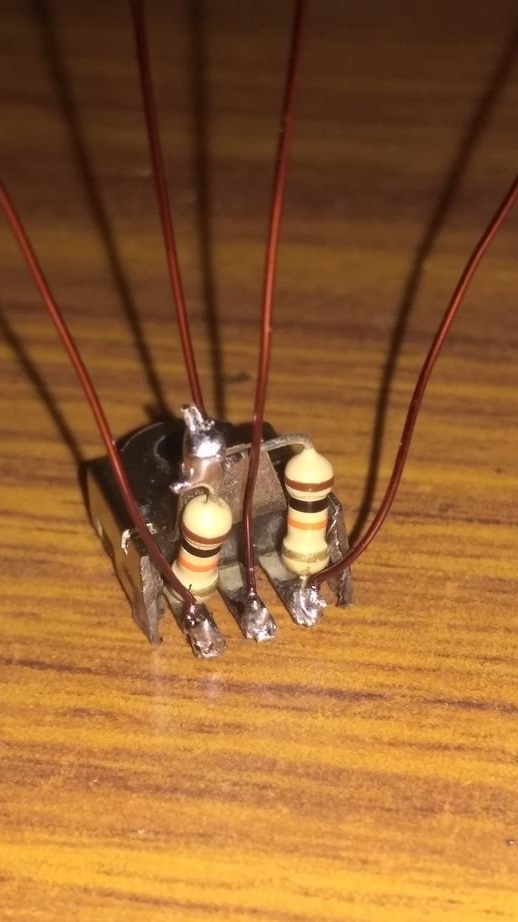
Infrapuna-anturi ja -kooderi katkaistaan koon pienentämiseksi.






Vaihe viisi: näyttö
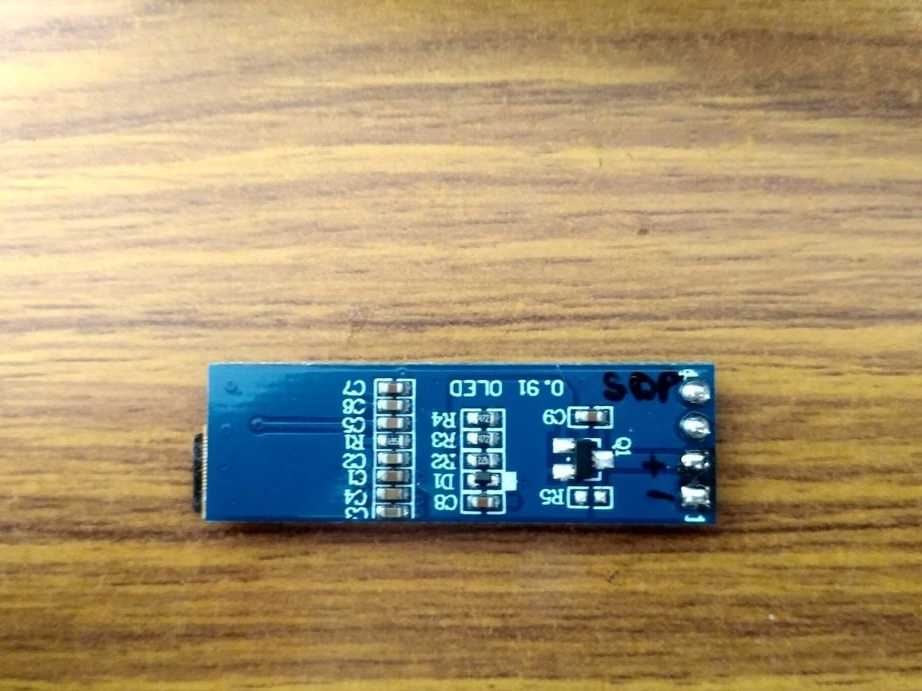
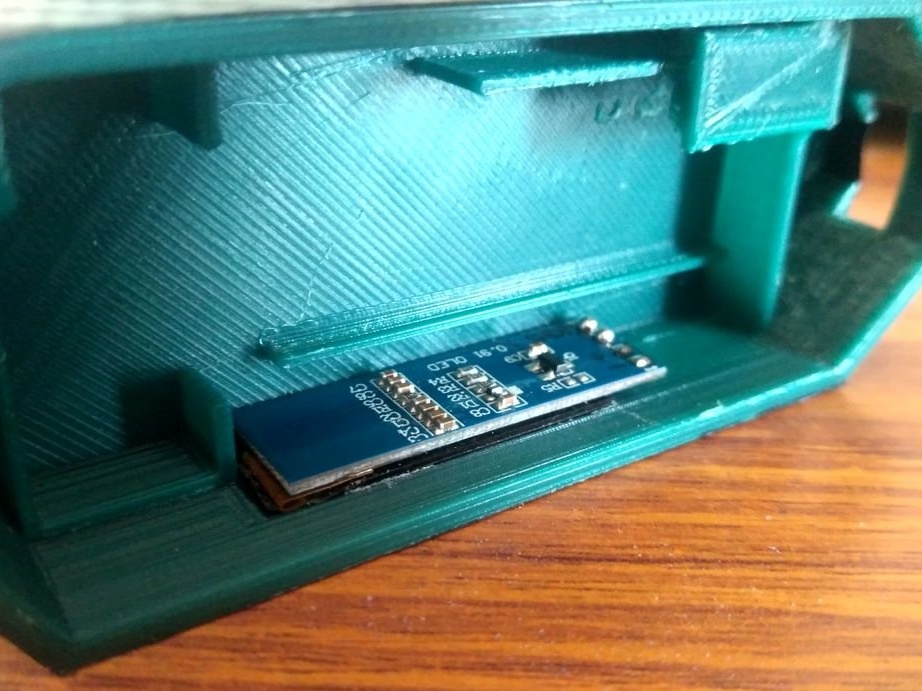
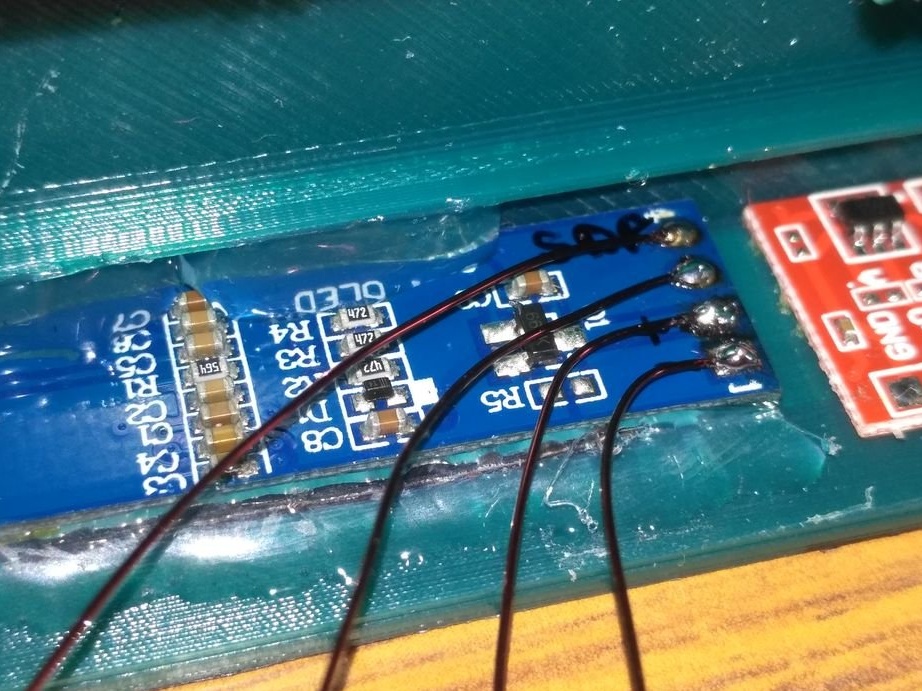
Merkitsee kontaktien nimet OLED-näytön takana, jotta voit myöhemmin luoda oikeat yhteydet. Asettaa OLED-näytön oikeaan kohtaan, kuten toinen kuva osoittaa. Korjaa näytön kuumalla liimalla.

Vaihe kuusi: moduulit
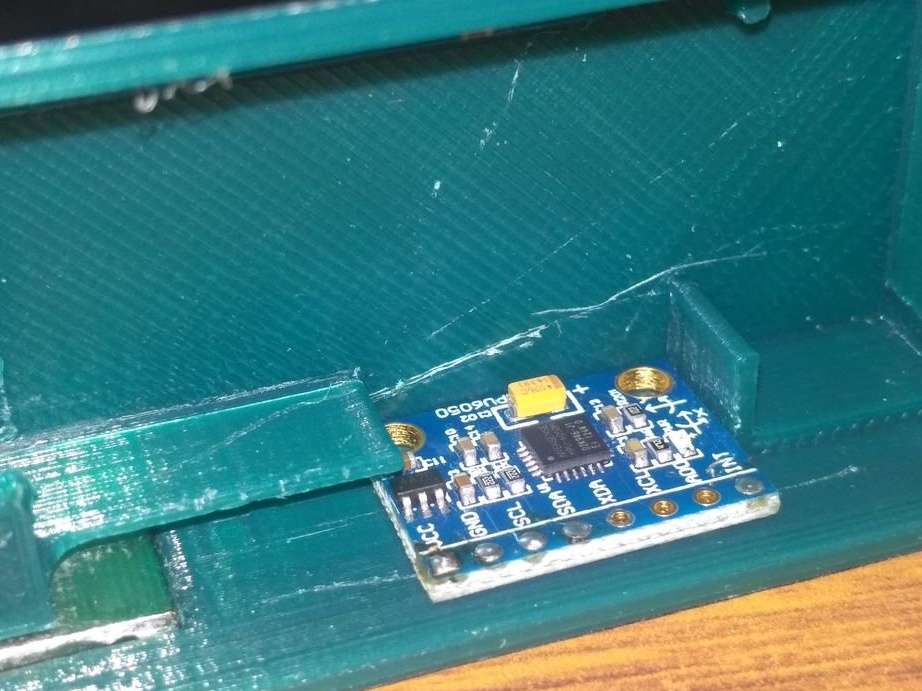
Liimaa anturimoduulin ja MPU6050.


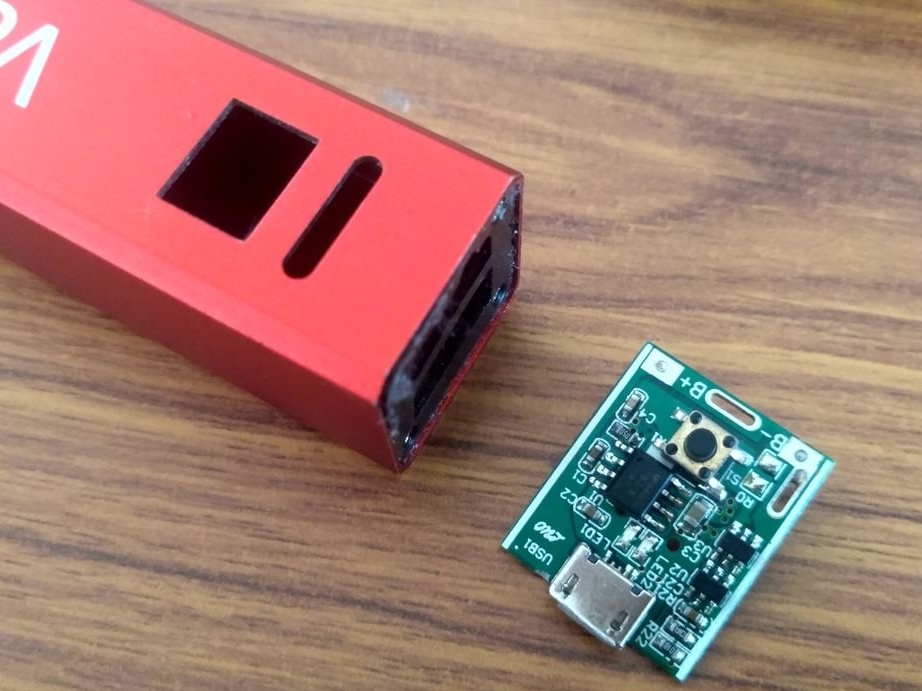
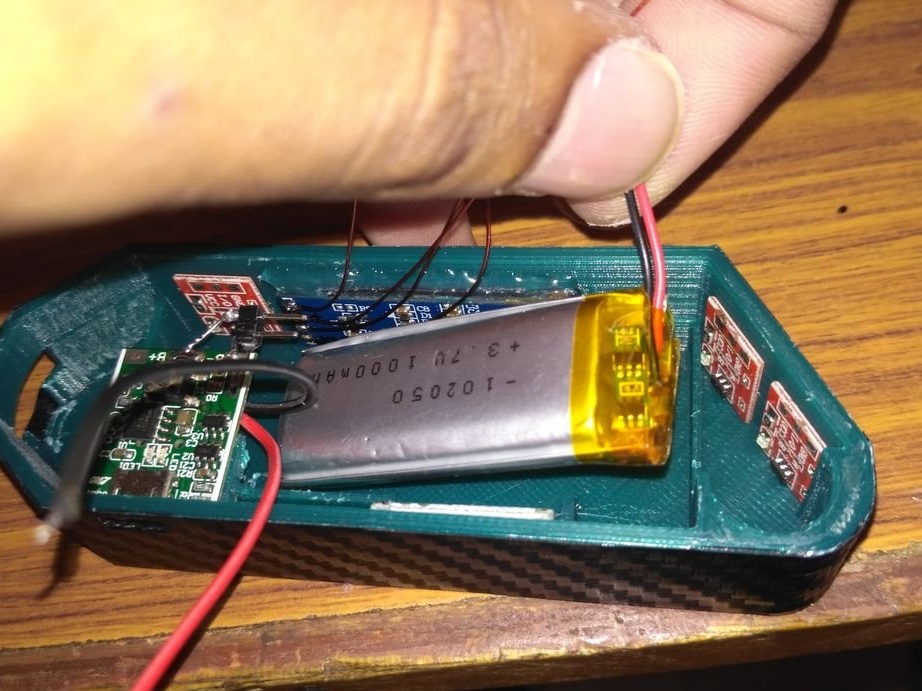
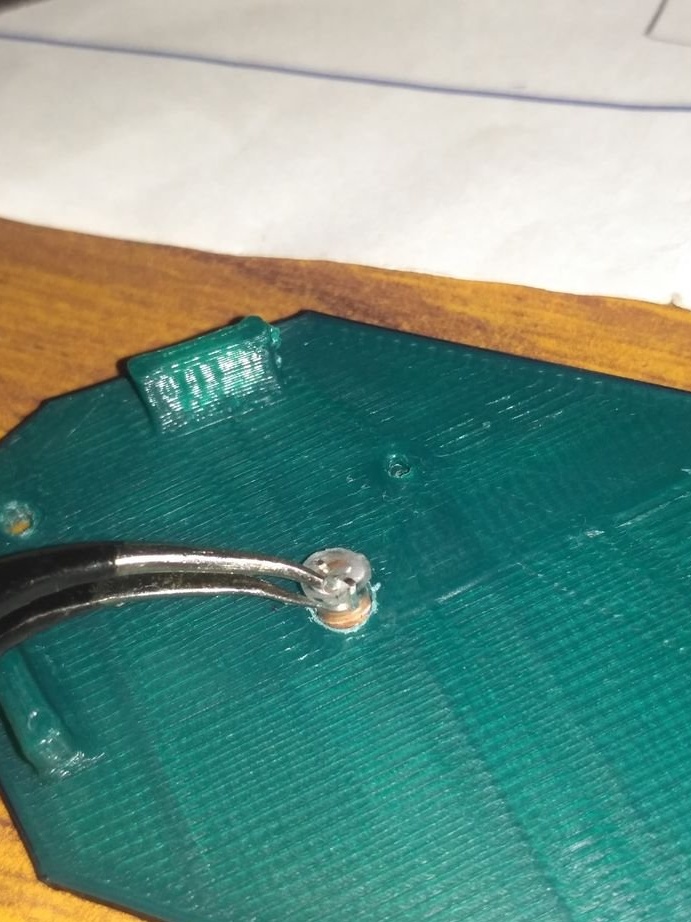
Seitsemäs vaihe: latausmoduuli ja akku
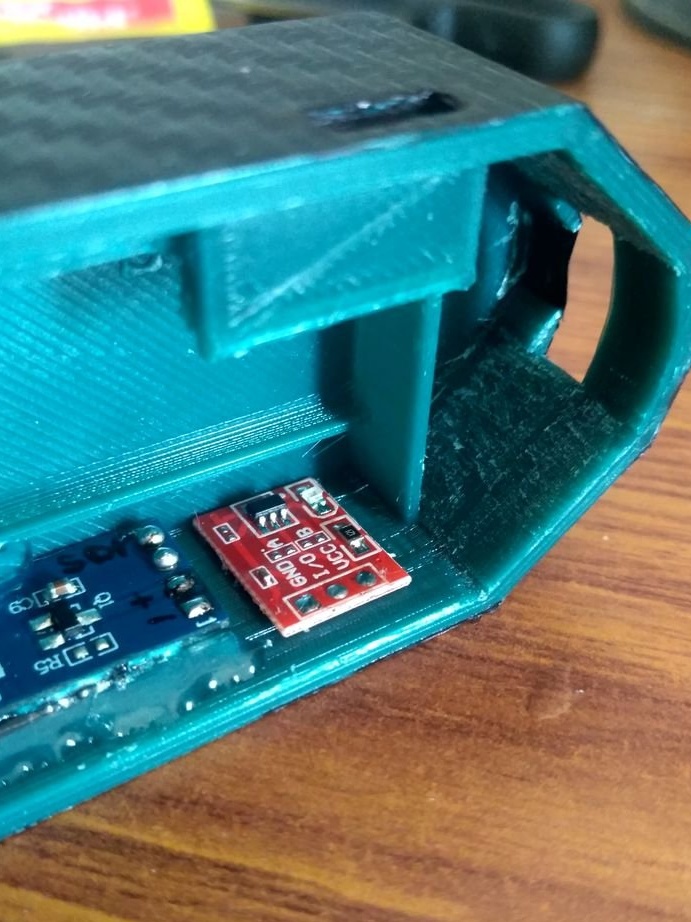
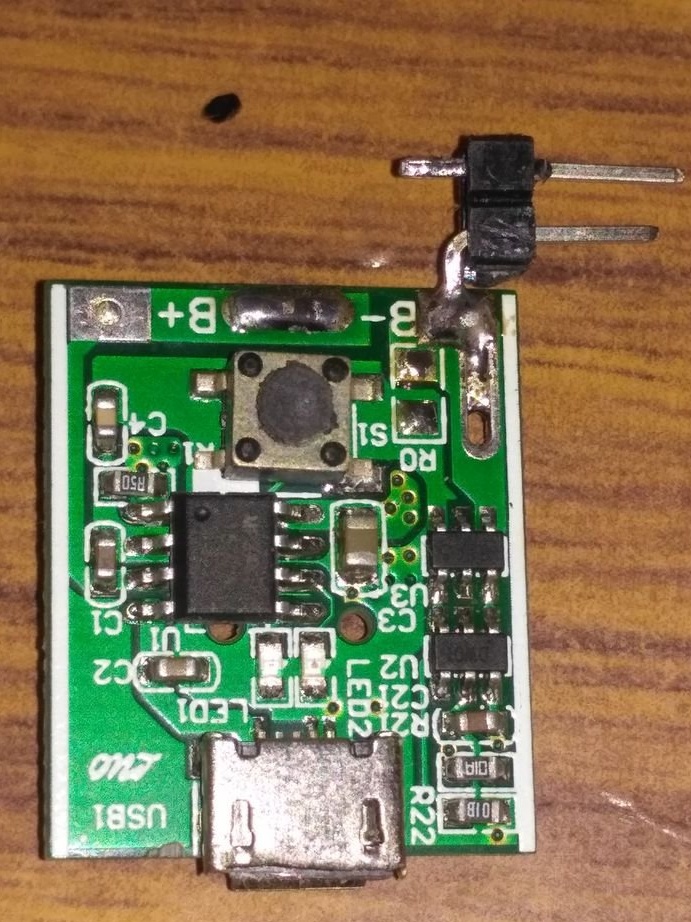
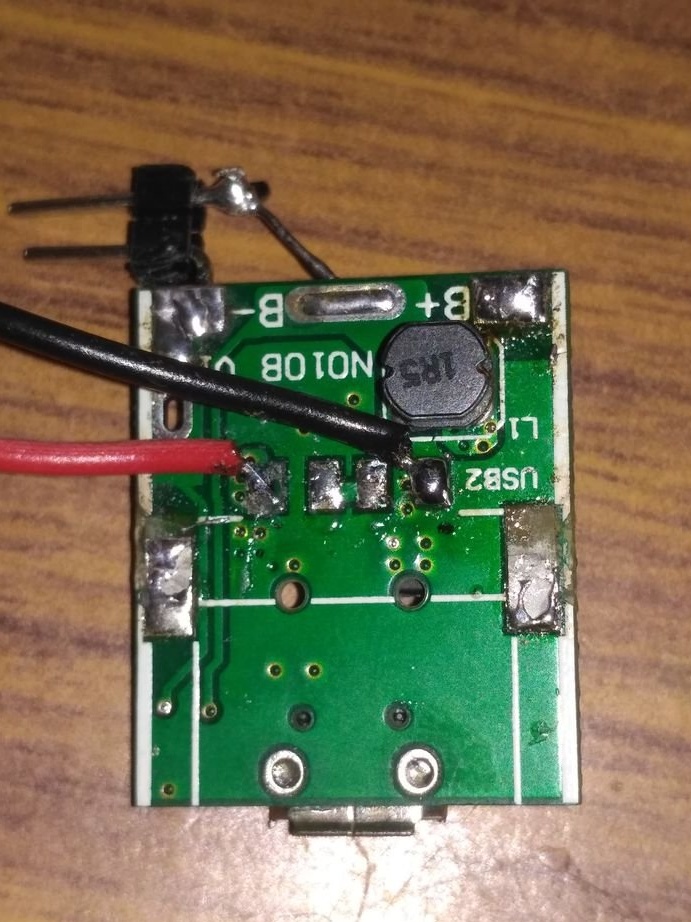
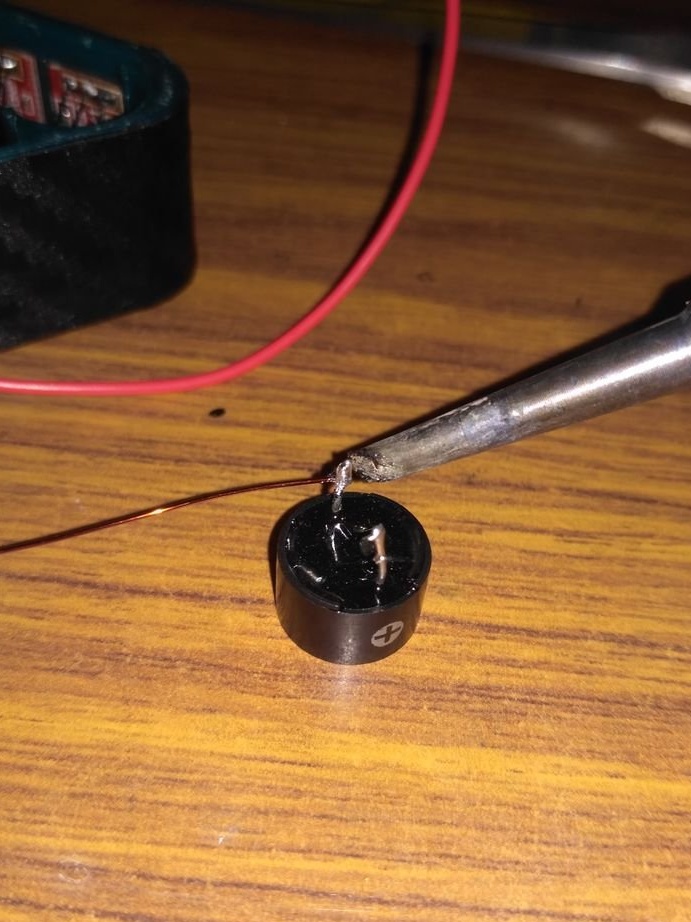
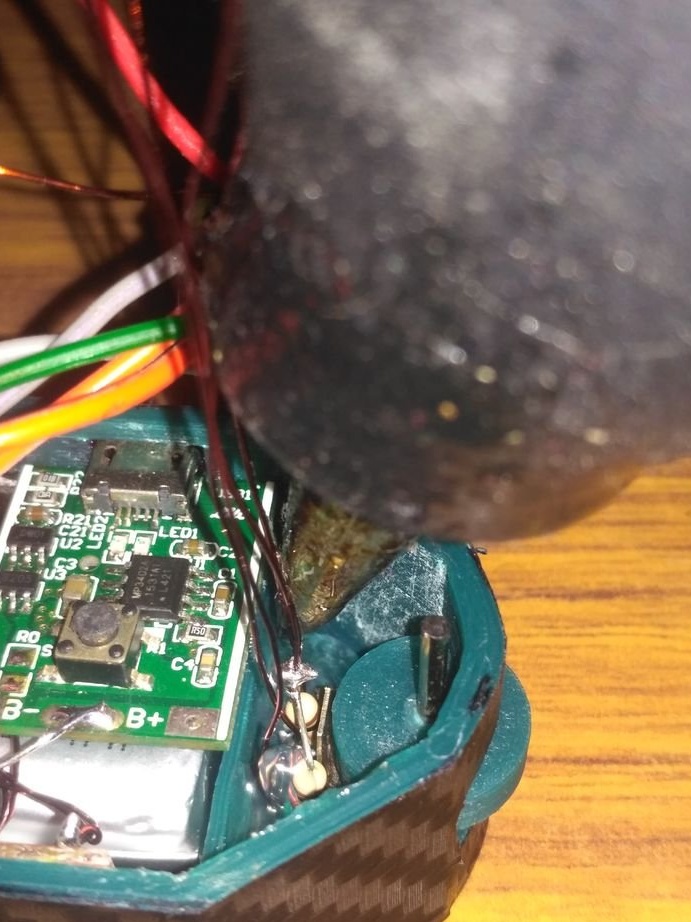
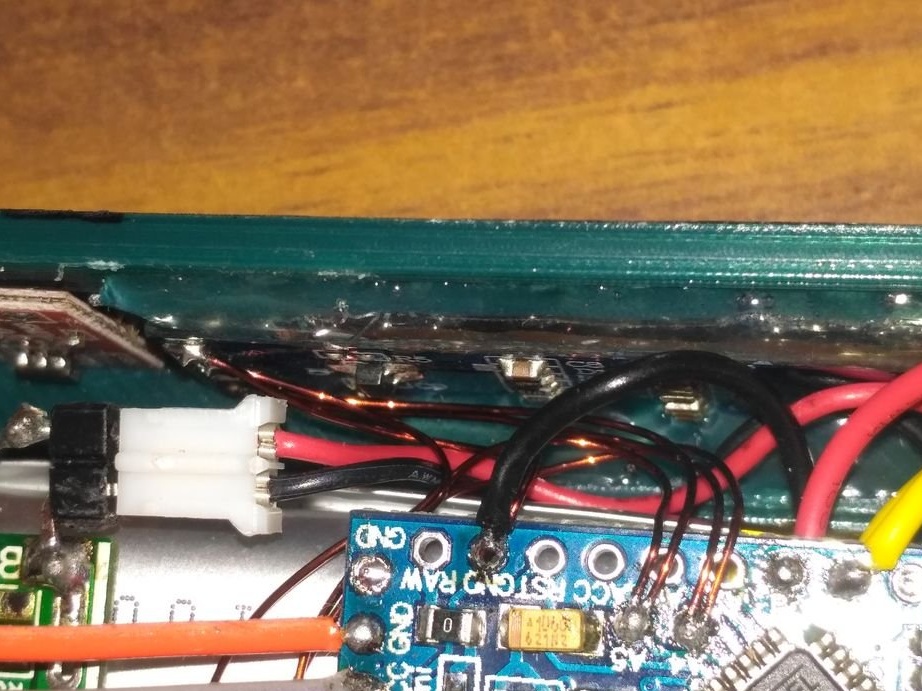
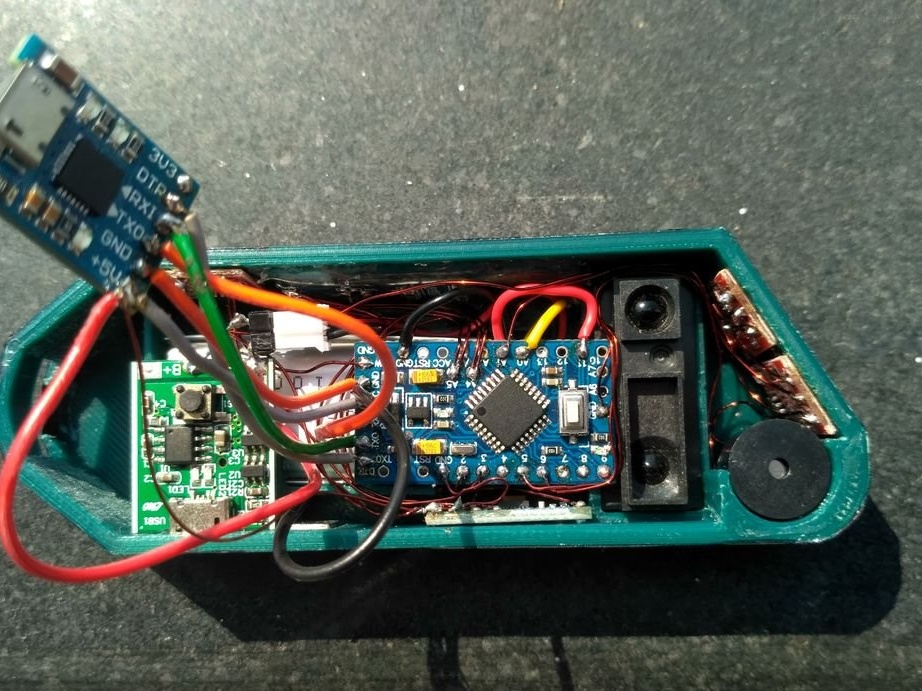
Tässä moduulissa on sekä akkusuojapiiri että 5 V, 1 A. tehostajamuunnin. Siinä on myös virtapainike, jota voidaan käyttää virtakytkimenä. Moduulin USB-liitäntäportti poistettiin käyttämällä juotinta ja kaksi johtoa juotettiin + 5 V: n liittimiin ja maahan, kuten 4. valokuvassa näkyy.
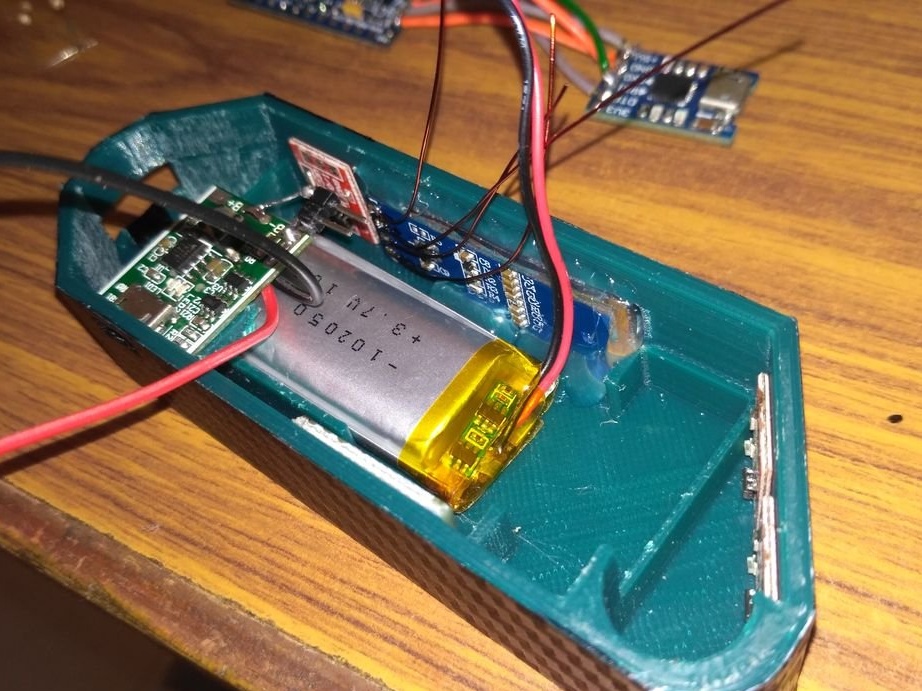
Seuraavaksi sinun on juotettava kaksi pistokeliitintä kohtaan B + ja B-, kuten kahdessa ensimmäisessä kuvassa, ja tarkista sitten, toimiiko moduuli akun kanssa.
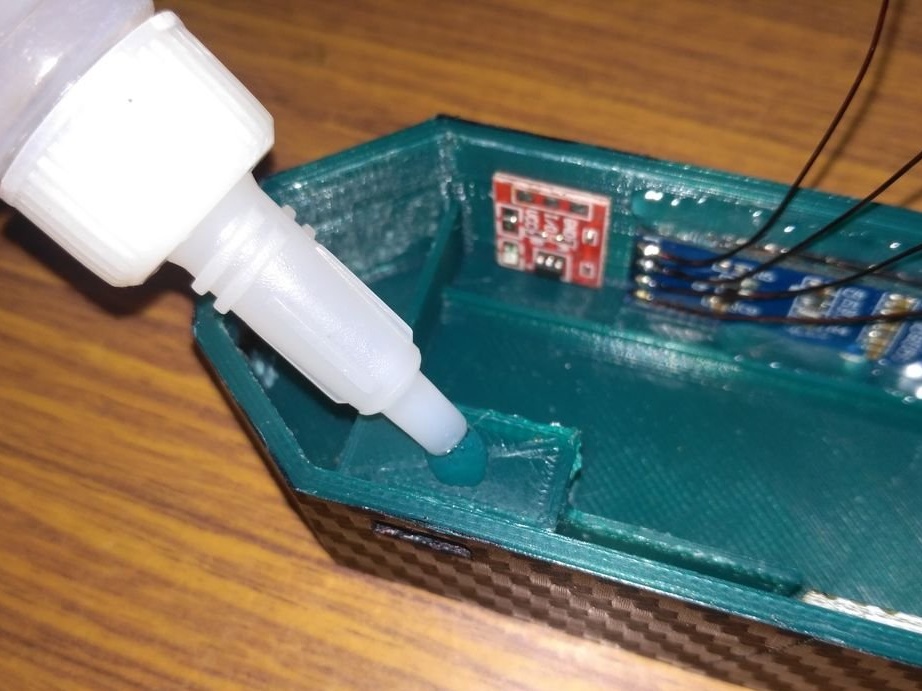
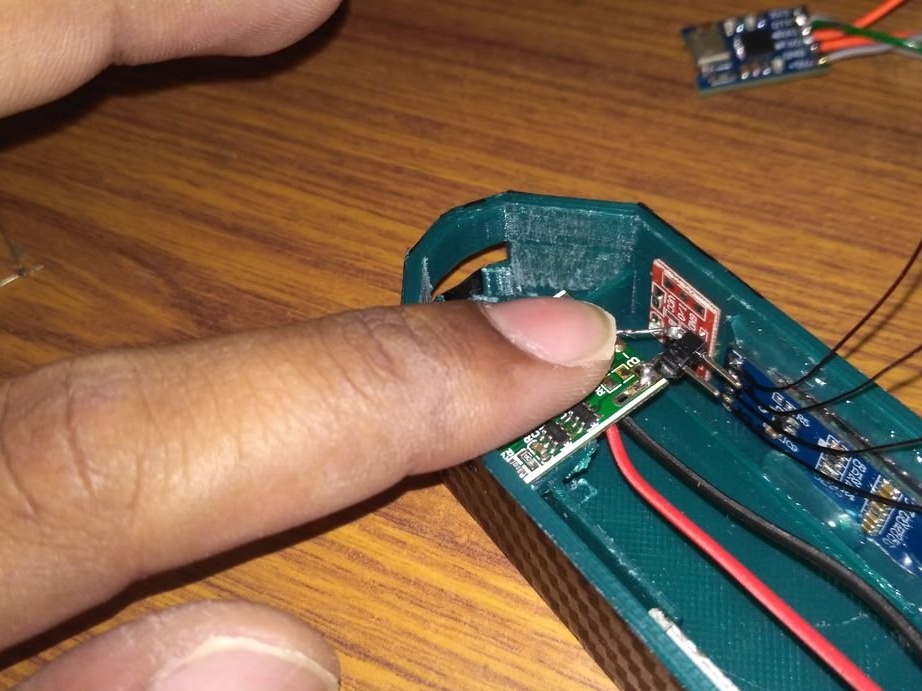
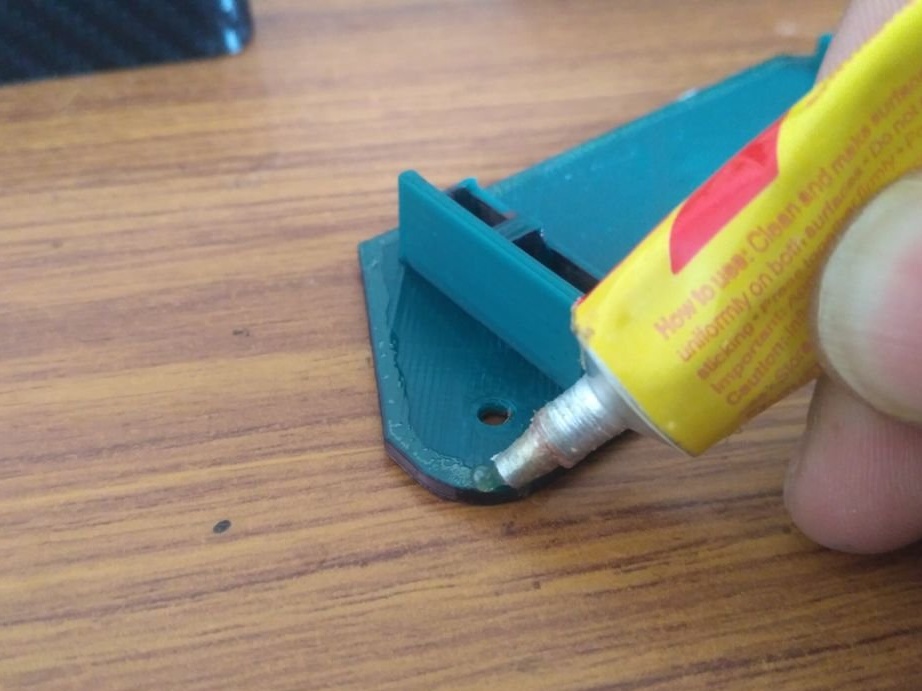
Nyt sinun on levitettävä liimaa moduulin mukana toimitetulle alustalle ja asetettava moduuli varovasti varmistamalla, että latausportti ja reikä on asennettu tarkalleen reikiin.

Kahdeksas vaihe: Akun ja infrapuna-anturin asentaminen
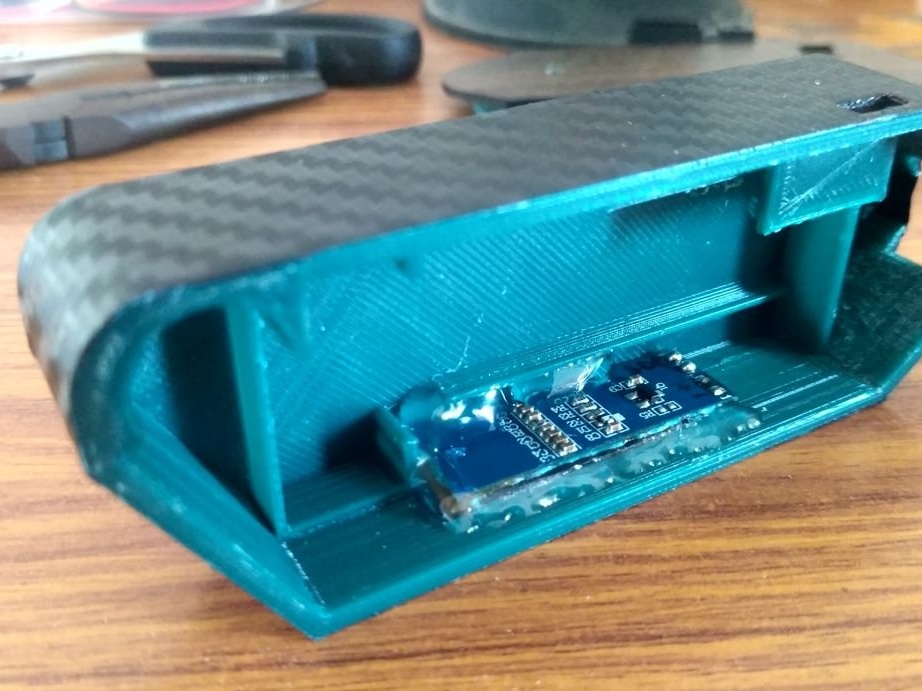
Juotosjohdot näyttötappeihin. Asentaa akun ja infrapuna-anturin.

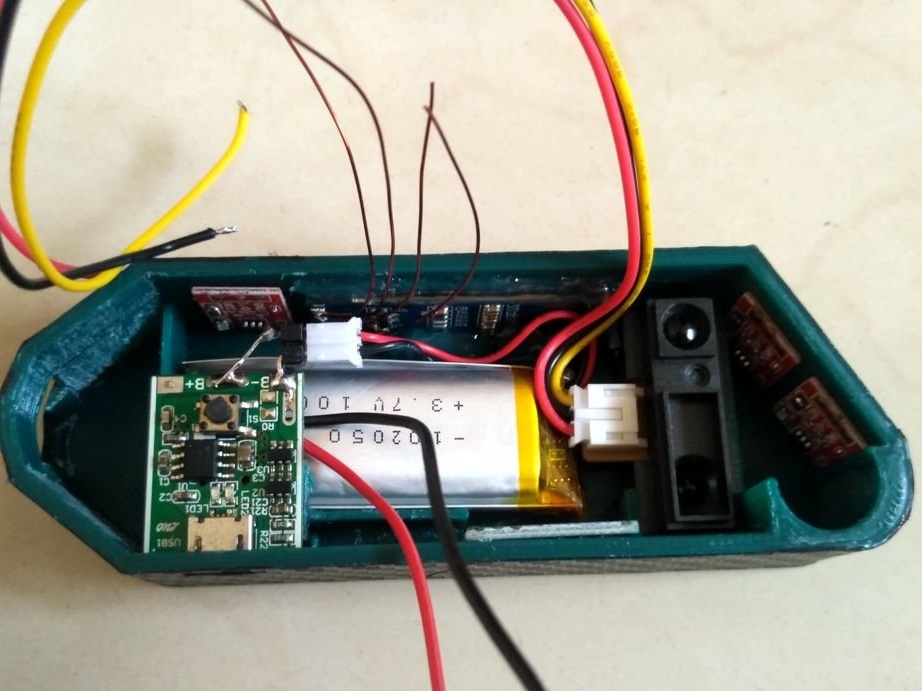
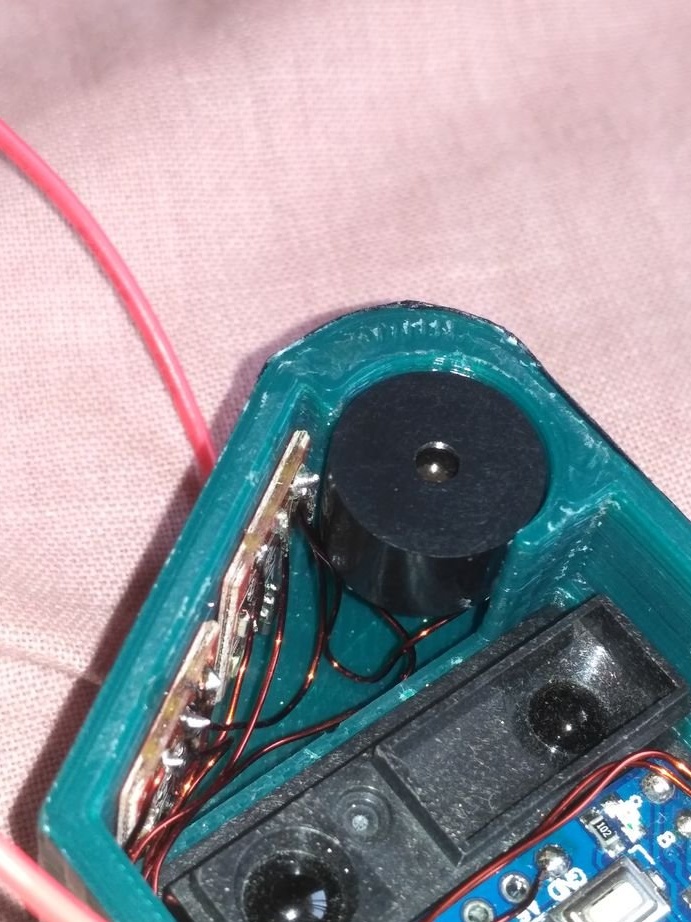
Vaihe yhdeksän: Summeri ja latausmoduuli
Järjestelmän mukaan se asentaa latausmoduulin ja summerin.

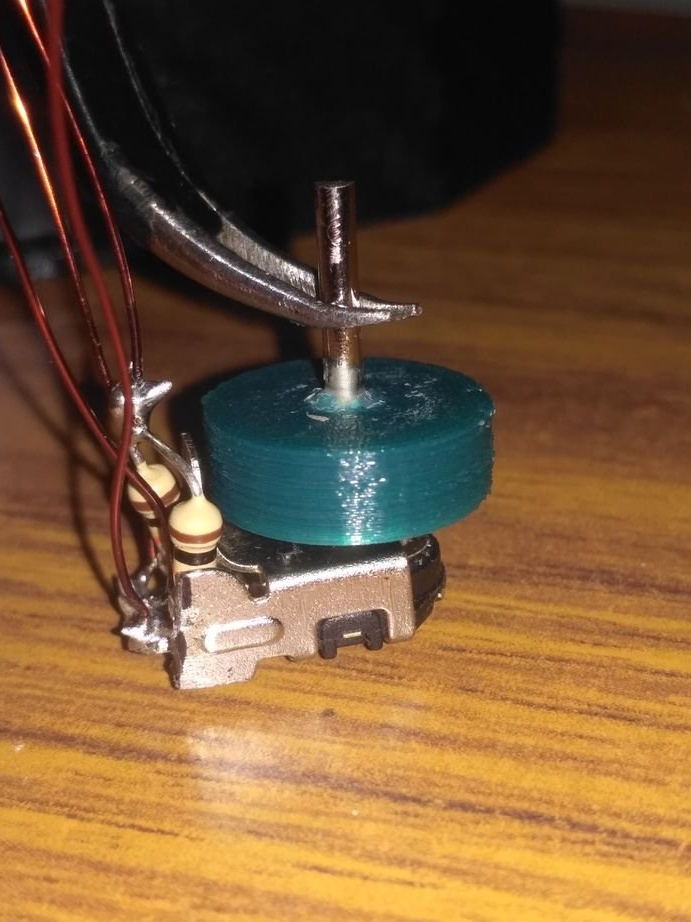
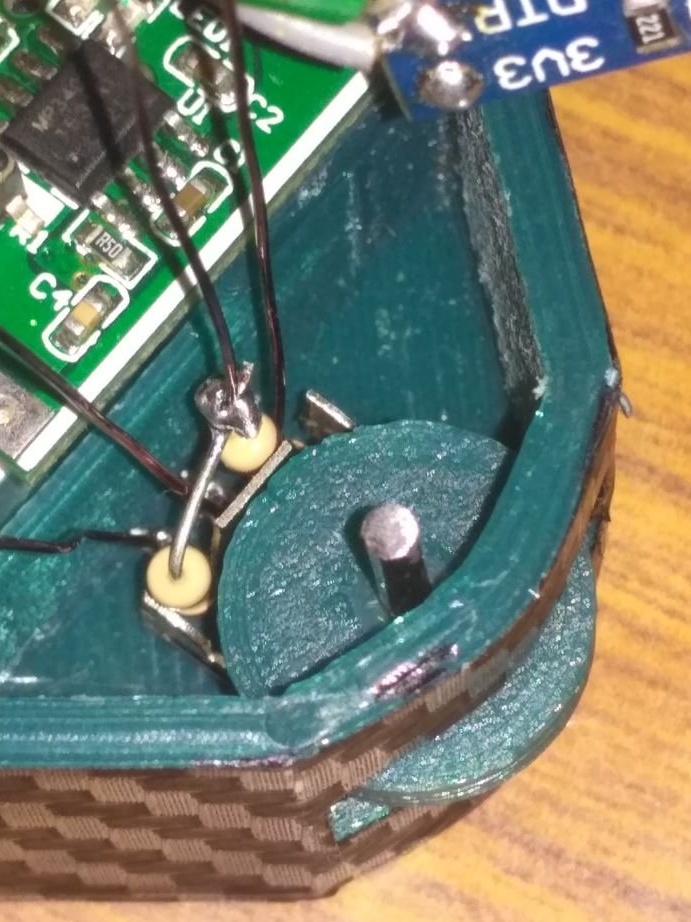
Vaihe kymmenen: Kooderi
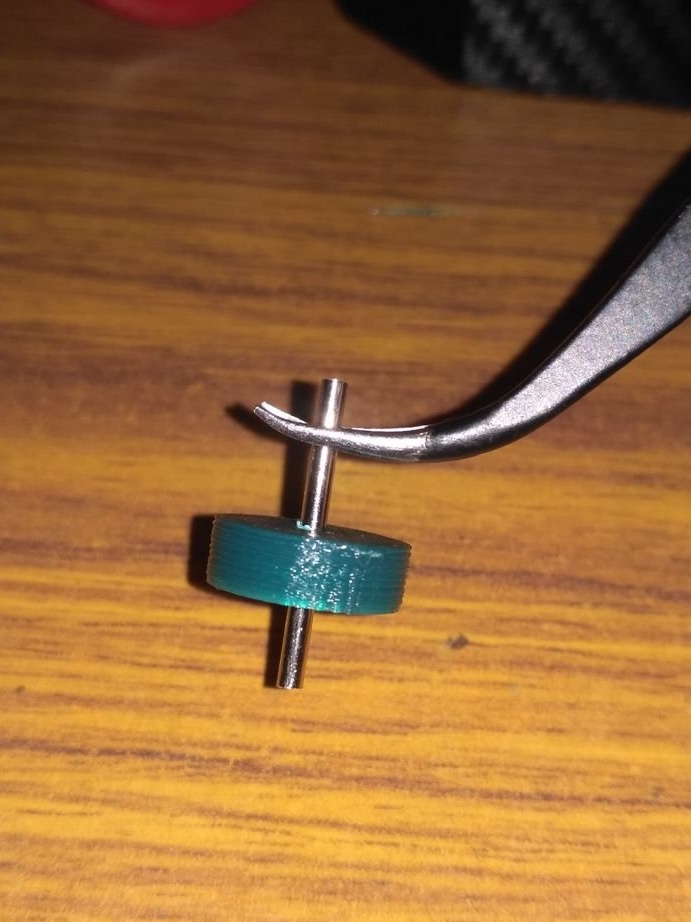
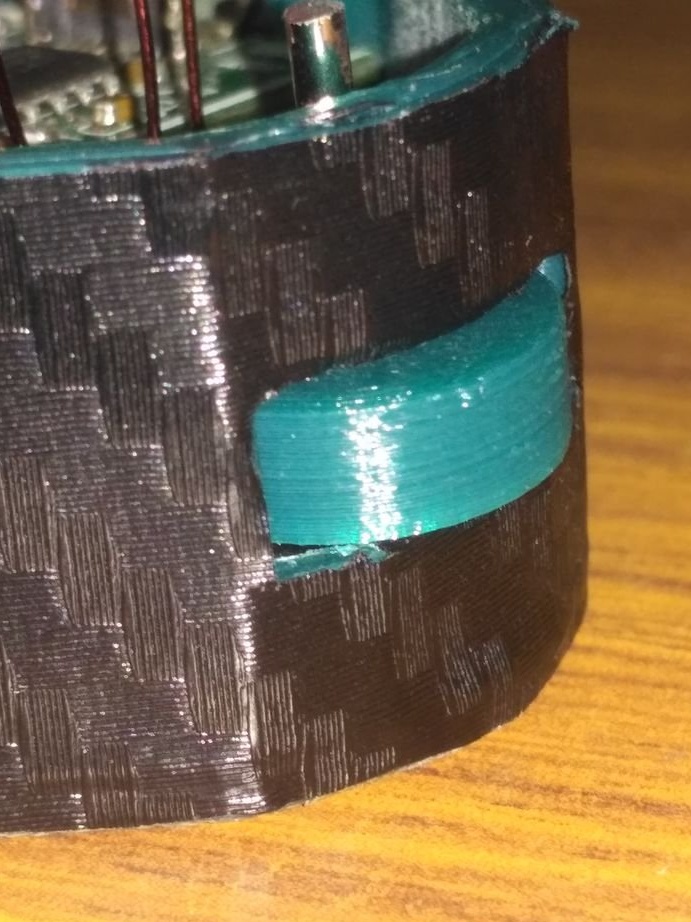
Kaavan mukaan asentaa kooderi. Lisää teräsakselin kooderiin ja pyörään. Se käyttää superliimaa akselin ja pyörän kiinnittämiseen. Asentaa kooderin, jonka pyörä on kotelon sisällä.




Vaihe yksitoista: Asennus
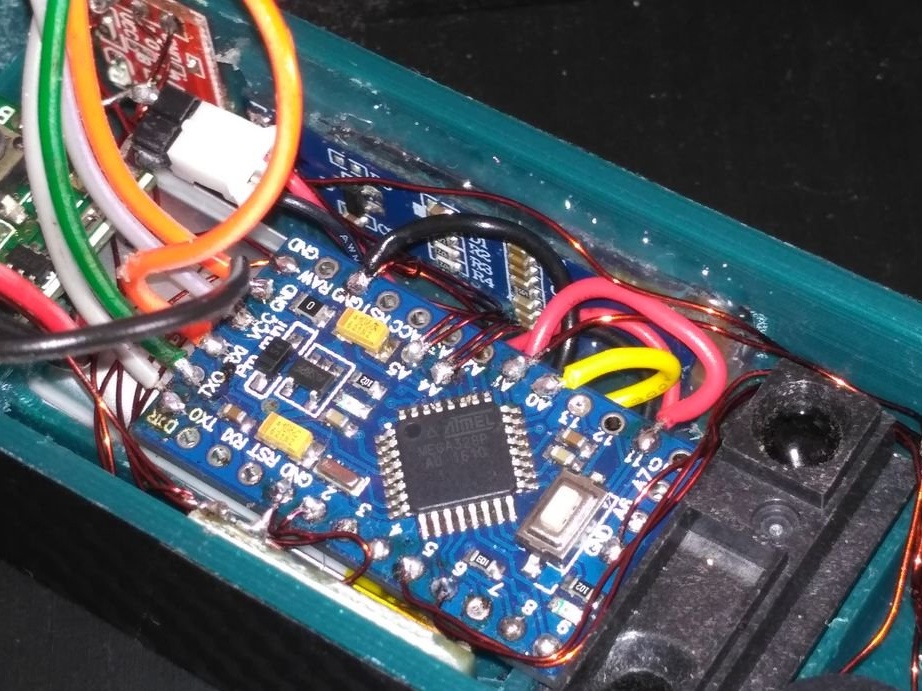
Korjaa anturimoduulit. Piirin mukaan kiinnittää johdot. Asennuksen aikana on varmistettava, että johdot eivät pudota pyörän alle eivätkä kata infrapuna-anturin yleiskuvaa.


Vaihe 12: Lataa koodi
Lataa koodi ja kirjastot.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

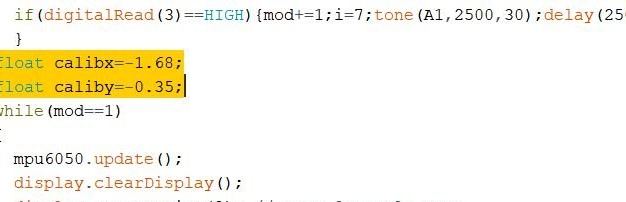
Vaihe 13: Kalibrointi
Ensin gyroskooppi kalibroidaan. Koska MPU6050-kiihtyvyysanturi / gyroskooppimoduuli on yksinkertaisesti liimattu runkoon, se ei ehkä ole täysin tasainen. Siksi tämän virheen korjaamiseksi suoritetaan seuraavat vaiheet.
1. Kytke laite tietokoneeseen ja aseta se tasaiselle alustalle.
2. Siirry laitteen LEVEL-tilaan koskettamalla “M” -painiketta ja kirjoittamalla X- ja Y-arvot.
3: Määritä nämä arvot koodin muuttujille “calibx” ja “caliby”.
4: Lataa ohjelma uudelleen.



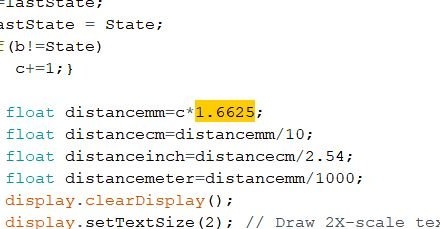
Laskee nyt etäisyydet pyörän kierrosta kohti.
Askelmäärä kooderin akselin kierrosta kohti, N = 24 askelta
Pyörän halkaisija, D = 12,7 mm
Pyörän kehä, C = 2 * pi * (D / 2) = 2 * 3,14 * 6,35 = 39,898 mm
Siksi askelta kohti kuljettu matka = C / N = 39,898 / 24 = 1,6625 mm.
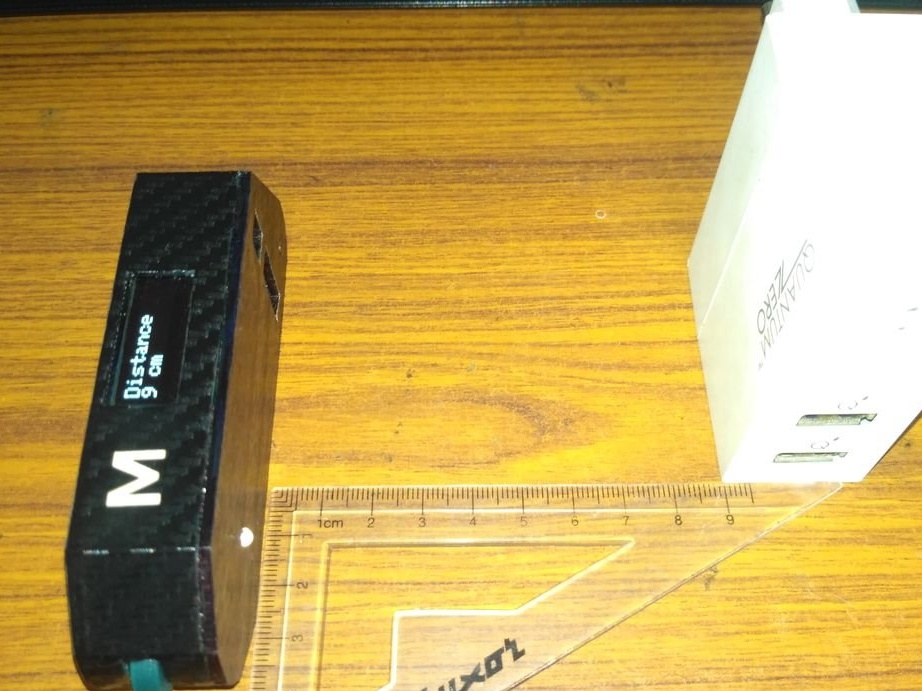
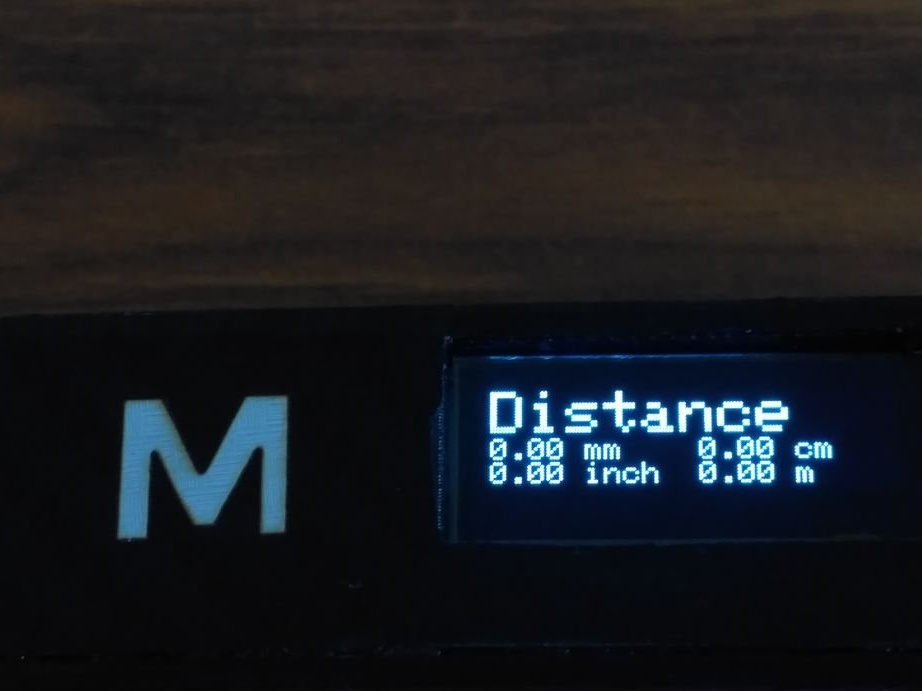
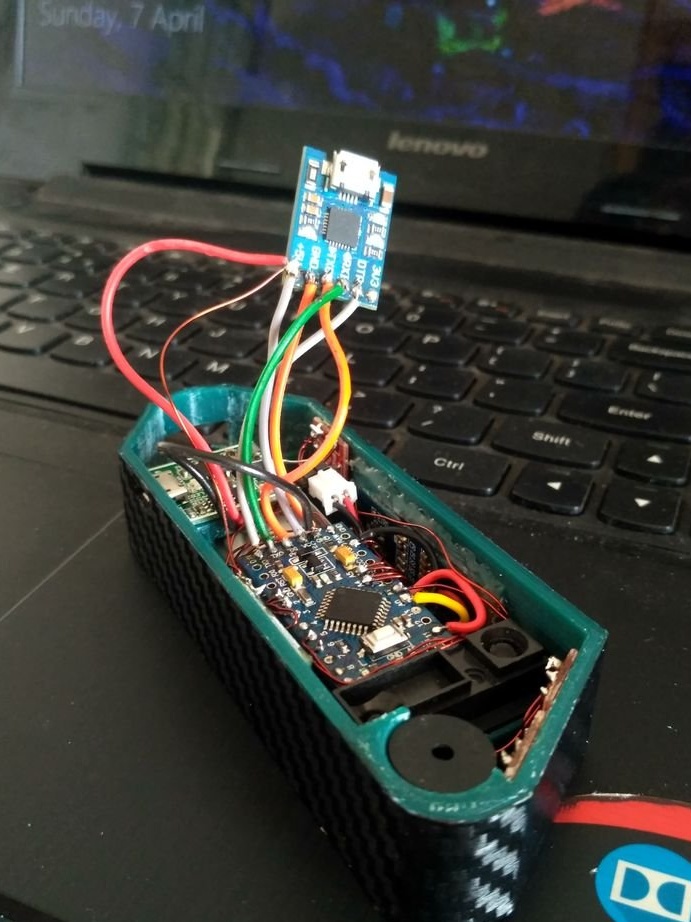
Vaihe neljätoista: Testaus
Ennen kotelon kannen asentamista se testaa anturit, latausmoduulin, painikkeet, näytön.



Vaihe 15: Nappien ja kotelon kokoonpano
Latauskortin virtapainike on lyhyt ja isäntä, leikkaamalla jalat, asettaa ylimääräisen LEDin, joka painaa painiketta.



Liimaa vartalon kaksi puolikasta.





Vaihe kuusitoista: merkitse painikkeet
Kirjeet leikattiin laserleikkurilla ja liimattiin sitten runkoon.




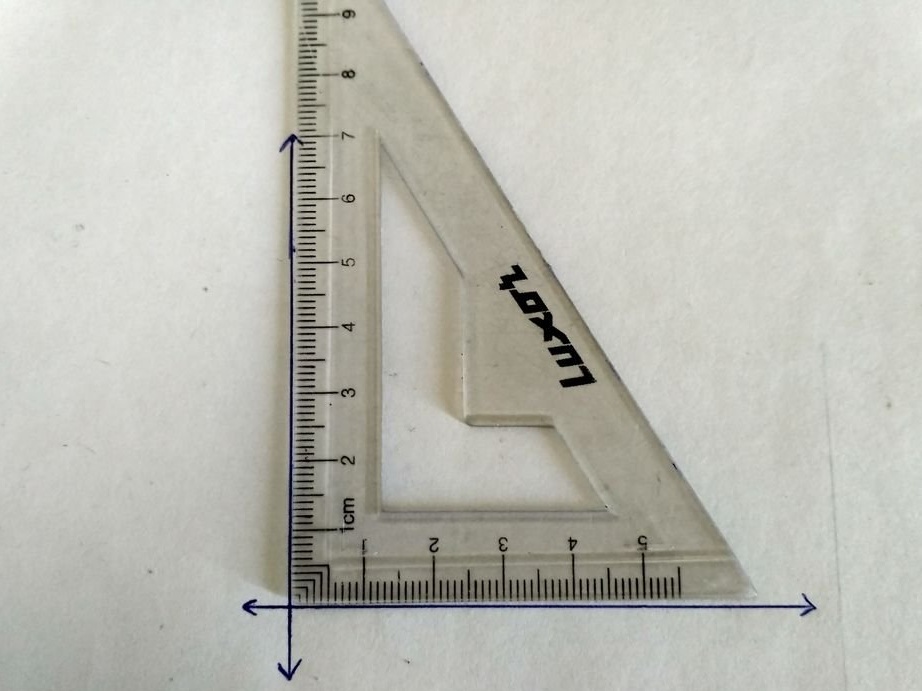
Kaikki on valmis, jää vain testata laite toiminnassa.