

Terveisiä sivustomme asukkaat!
Tällä kertaa samannimisen YouTube-kanavan kirjoittaja AlexGyver kertoi lomasta, jota muuten emme todella pidä, päätti toistaa Adafruit-projekti - bioninen silmä, joka asetetaan kaasuhitsauslasin lasille.

Koodin kannalta tämä valmis projekti ei todellakaan ole mielenkiintoinen, kirjoittaja oli kiinnostunut mekanismista, nimittäin sen koordinaattijärjestelmästä.
Palaamme tähän, mutta vähän myöhemmin, mutta ensin kerätään kaikki mekaniikat ja yhdistetään kaikki elektroninen komponentteja.
Toistaaksesi tämän projektin tarvitset:
1) Kaasuhitsauslasit. Voit käyttää sekä metallia että muovia.

Muovi sopii varmasti paremmin, mutta tietenkään ne eivät voi ylpeillä laadulla. Erityisesti tässä tapauksessa muovista valmistetut sivut putosivat kirjaimellisesti välittömästi ja kirjoittajan oli liimattava ne.

Tällaisia laseja voi ostaa kaupasta, joka myy työkaluja tai rakennusmateriaaleja. Kirjailija osti nämä All Instruments -kaupasta.
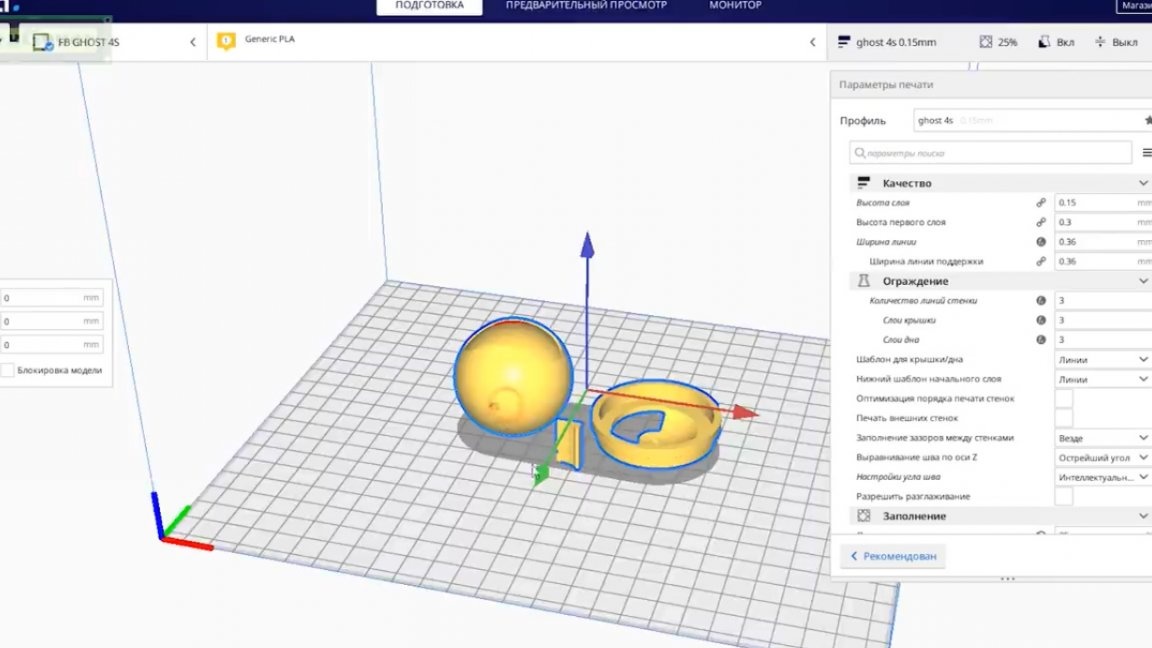
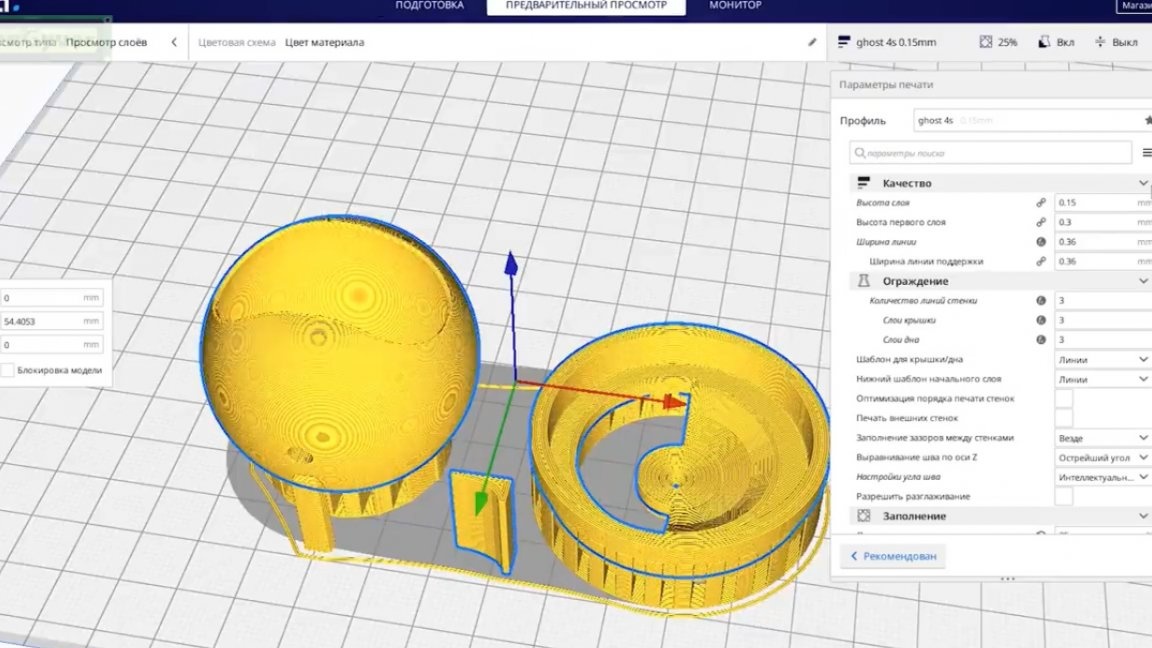
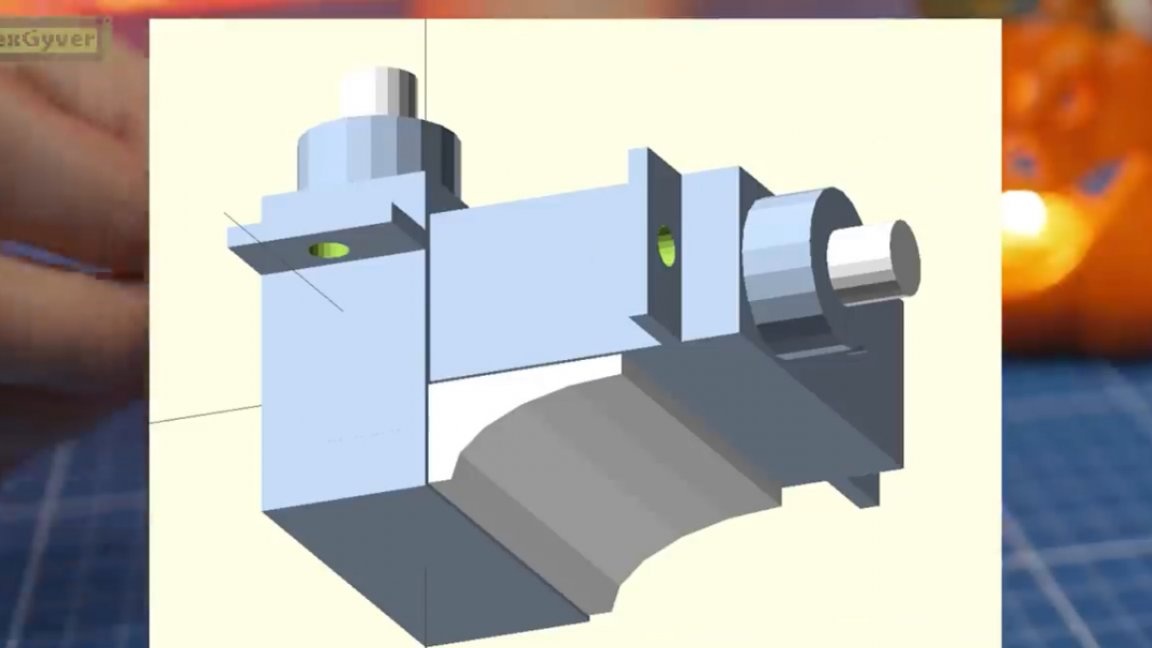
2) Seuraavaksi tarvitsemme nämä painettuina 3D-tulostin varaosat.
Kirjailija tulostaa elementit valkoisella PLA-muovilla uudelle 32-bittiselle flybear ghost 4s 3D-tulostimelle. tiedosto sisältää kaikki 3 mallia kerralla. Tulostaminen on välttämätöntä tuilla.

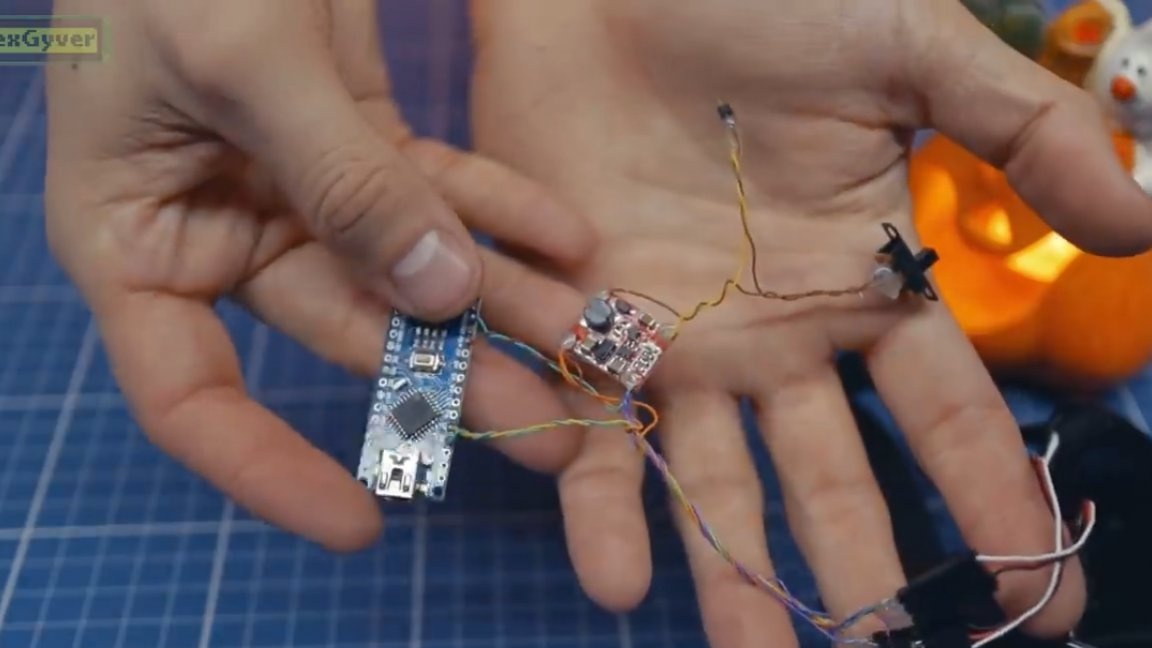
3) Seuraava komponentti, jota tarvitaan Halloween-erityisprojektiimme, on alusta Arduino nanomallit.

4) Vaaditaan myös litiumioniakku:
5) Boost dc-dc (enintään 5 V) -muunnin;
6) kytkin:

7) Mikroservos, mutta ei vakio 9 grammaa, mutta vielä vähemmän:
Joten, tarvittavien komponenttien kanssa, eräänlainen tajunnut, siirrytään alas laitteen kokoonpanoon. Ensinnäkin, meidän on asennettava asemat seuraavasti:
Tässä on ymmärrettävämpi kuva:
Poistamme tarran ja liitämme superliiman avulla koko tämän asian.


Muuten, kiinalaiset servot näyttävät olevan hiukan erilaisia kuin Adafruth-servot, ja sinun on liimattava ne tällä tavoin pienellä siirrolla:
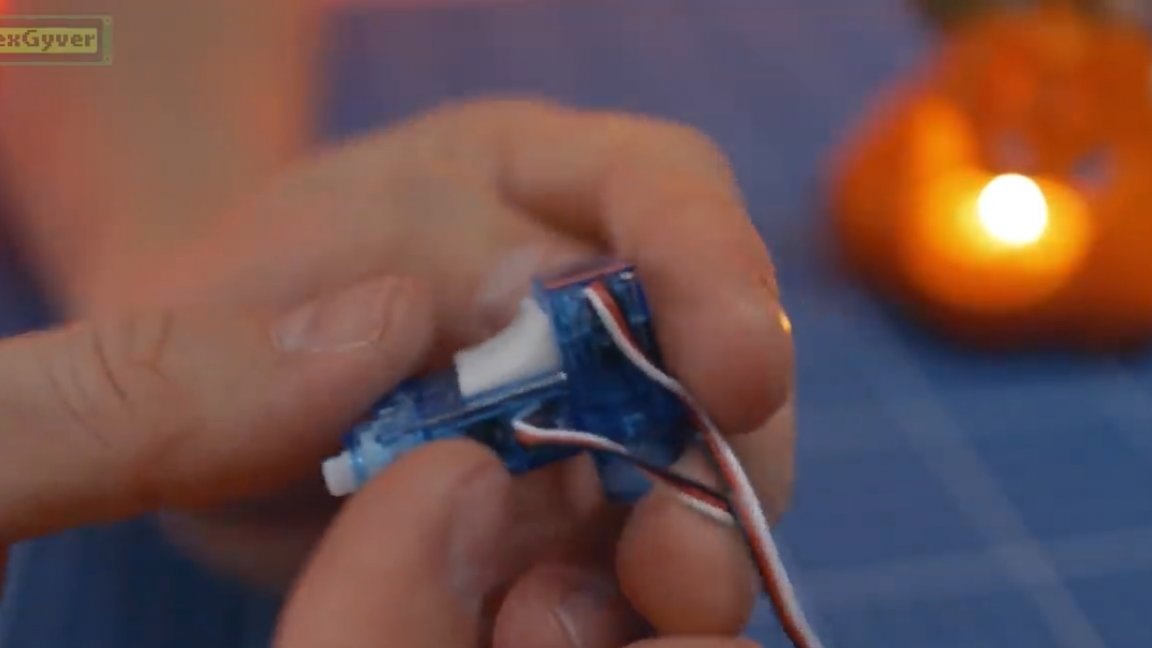
Korvat on poistettava, ne häiritsevät.
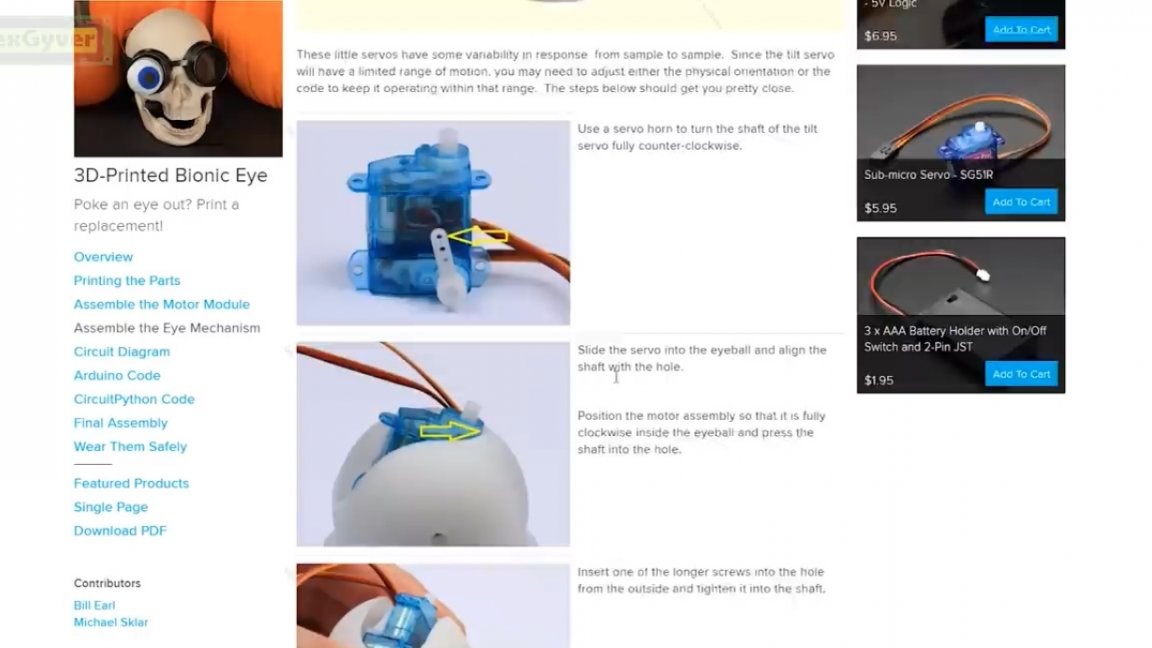
Sitten alempaan vetolaitteeseen koukutamme vipu ja käännä akselia vastapäivään.

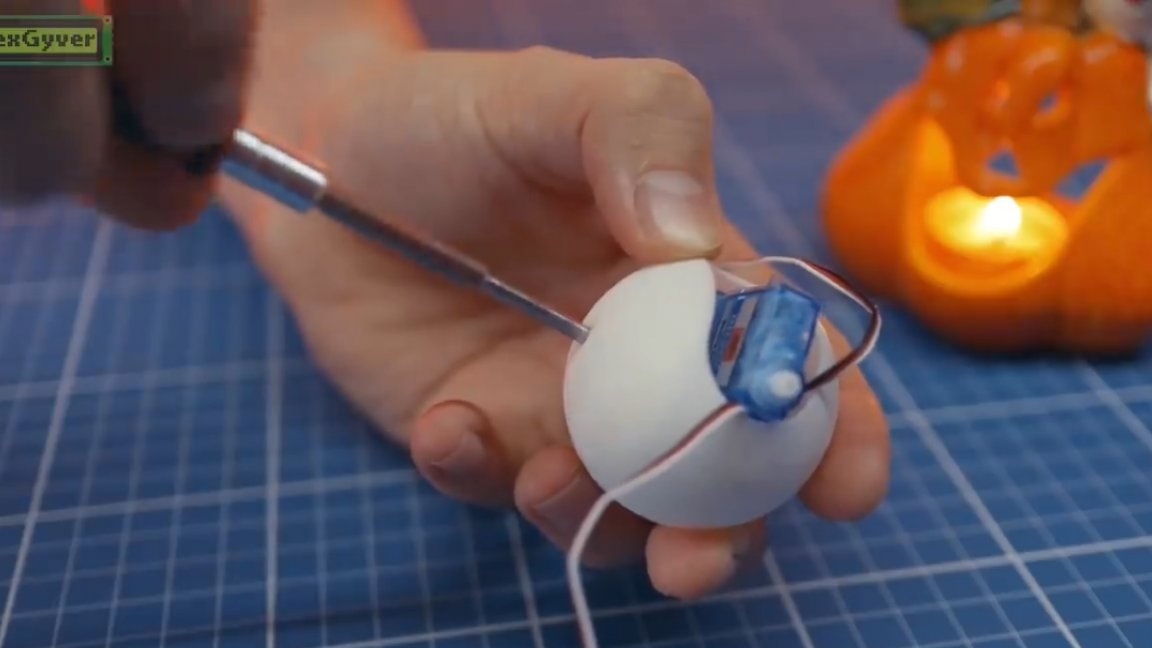
Aseta servot esipainettuihin 3D-tulostin tyhjä (silmä).
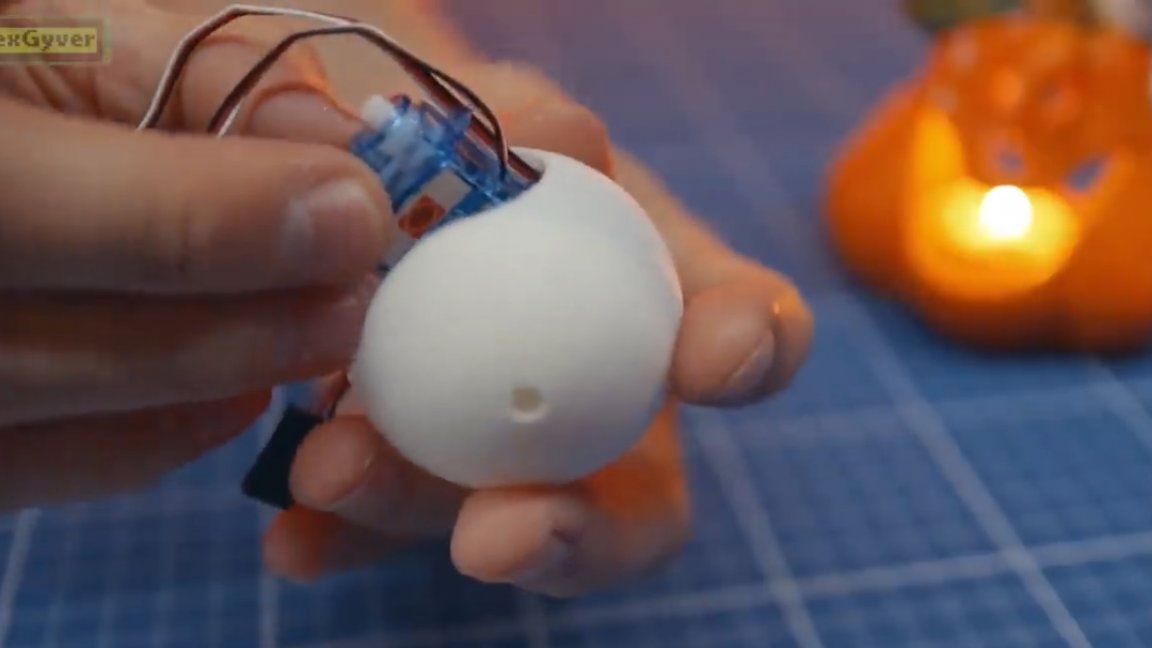
Tuemme ulkonevaa vetolaitetta aivan reunaan ja työnnä ulostuloakseli silmän sisäiseen reikään.

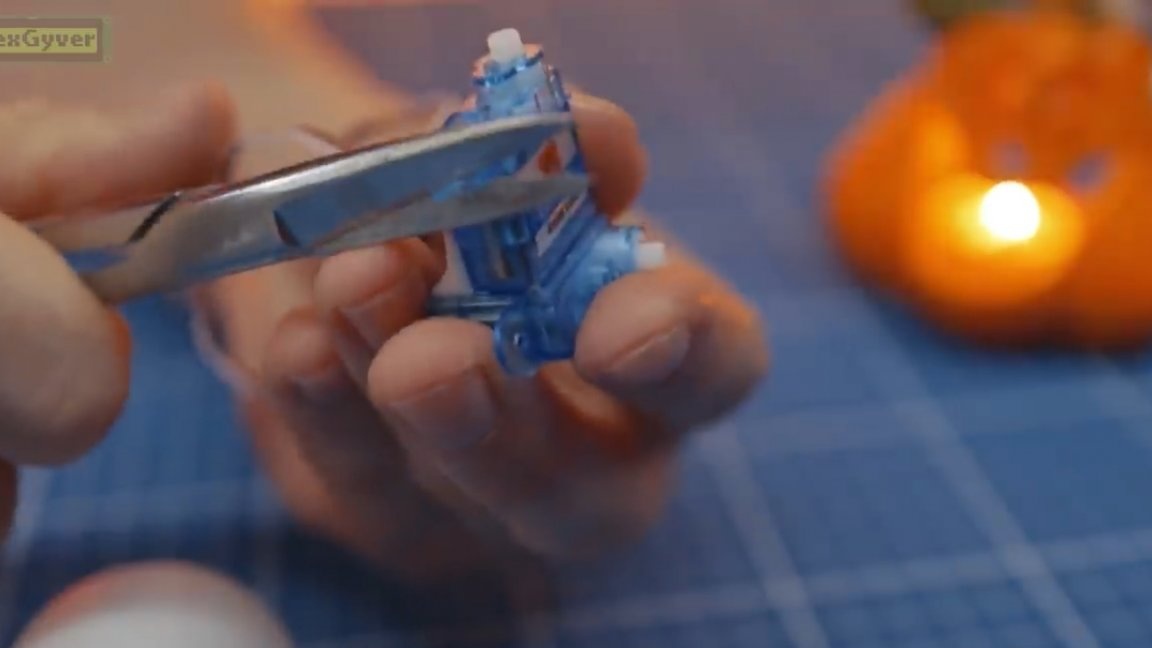
Pitkä kokonainen ruuvi on lyhennettävä hieman. Tämä voidaan tehdä nippeillä.

Sitten kiinnitämme sisäisen aseman lyhennetyllä ruuvilla.
Jos sinulla on servotestaja, voit varmistaa tuloksena olevan mekanismin toimivuuden.
Sitten kiinnitämme toisen silmäosan toisen käyttölaitteen akseliin ja kiinnitämme myös sen.

Olemme vakuuttuneita kokonaissuorituskyvystä (pitäisi toimia yhdessä).


Erityisesti tätä projektia varten kirjoittaja kirjoitti yksinkertaisen koodin, joka pyörittää asemia tasaisesti satunnaiskulmassa. Mutta silmän keskipiste oli hieman puolueellinen, joten löydämme todellisen keskuksen ja piirrämme oppilaan.

No, koska tämä on lomaprojekti ja loma on melko tarkka, tehkäämme siitä hieman kauheampi.

Aseta seuraavaksi tuloksena oleva osa laseihin.

Jos sitä ei ole asetettu paikalleen, on tarpeen hiota hieman.

Sitten koottiin kaikki.


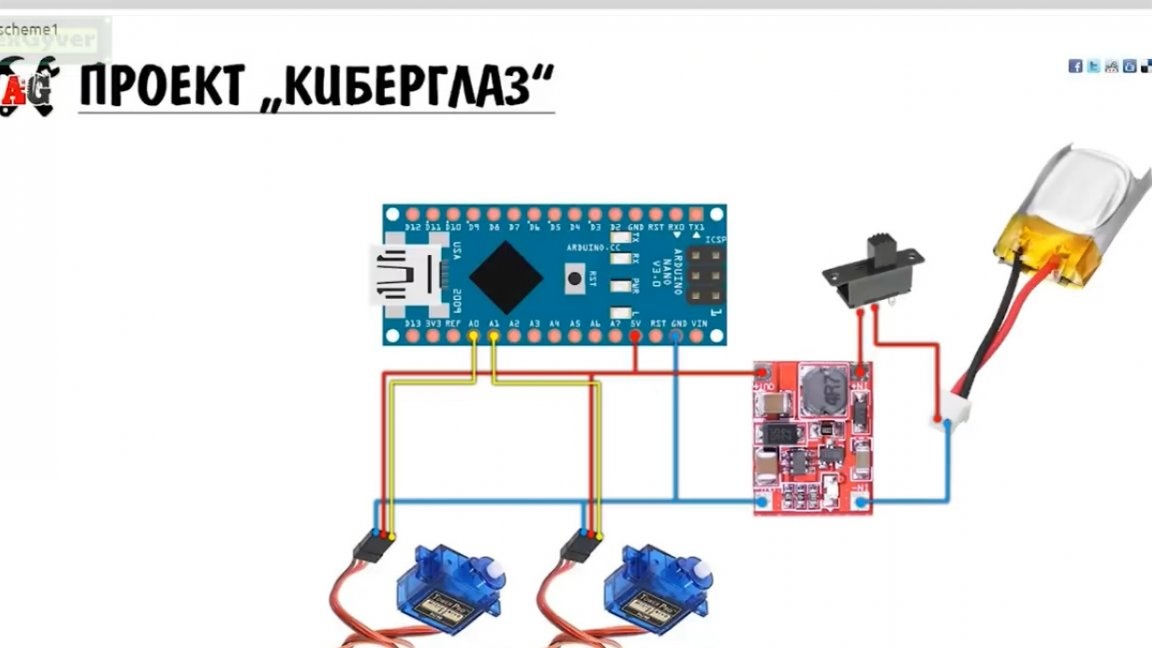
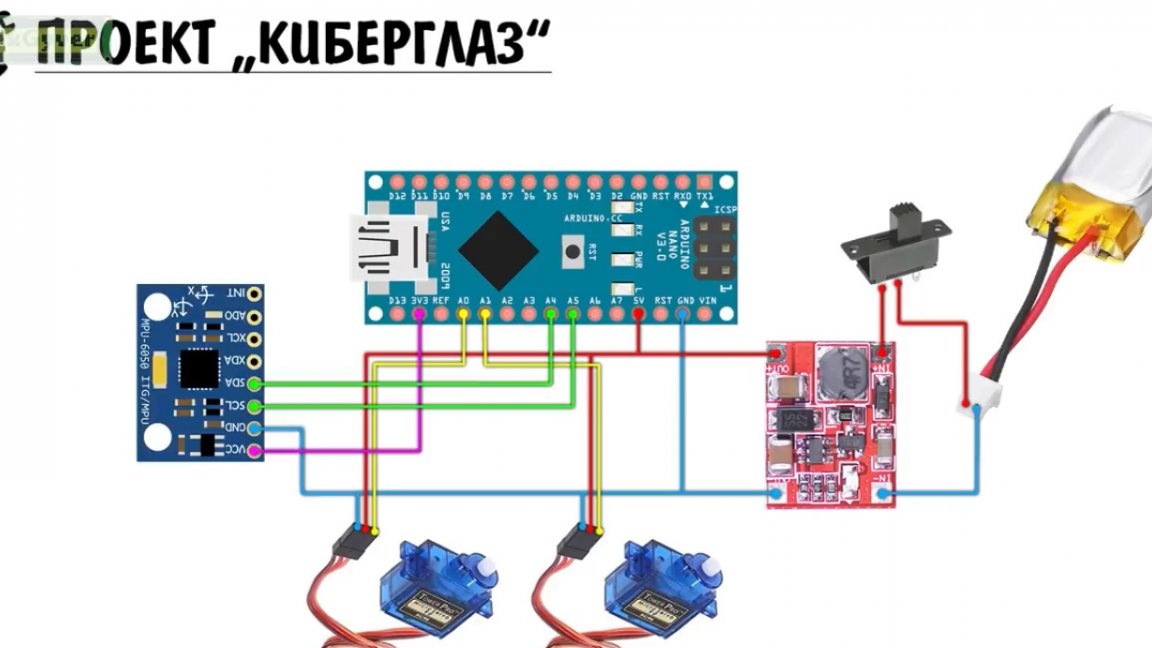
Seuraavaksi yhdistämme kaikki komponentit seuraavan kaavion mukaisesti:
Kaikki on valmis, mutta nyt meillä jokainen taajuusmuuttaja vain nousee satunnaiseen kulmaan, ja periaatteessa voit jättää sen.

Mutta muistatko, että artikkelin alussa mainittiin mekanismista ja koordinaatistoista? Joten mekanismi pyörii kahta akselia pitkin, mutta ei niitä, joita ihmisen silmä pyörii. Tavoitteenamme on saada tällainen mekanismi käyttäytymään aivan kuten ihmisen silmä. Ensi silmäyksellä tämä näyttää mahdottomalta, mutta voit yrittää saattaa sen koordinaattijärjestelmän normaaliksi, jotta voit sijoittaa oppilaan mihin tahansa haluamaasi asentoon.
Joten, meillä on kaksi kulmaa, merkitsemme niitä X: llä ja Y: llä.

Y on silmän pieni kulma ja X on silmän kiertymiskulma 180 astetta.
Kaikkien mahdollisten asentojen saavuttamiseksi on välttämätöntä hallita molempia kulmia, ja niillä on erityisyys. Aloitetaan yksinkertaisimmalla - ympyräliikkeellä, suurimmalla säteellä.
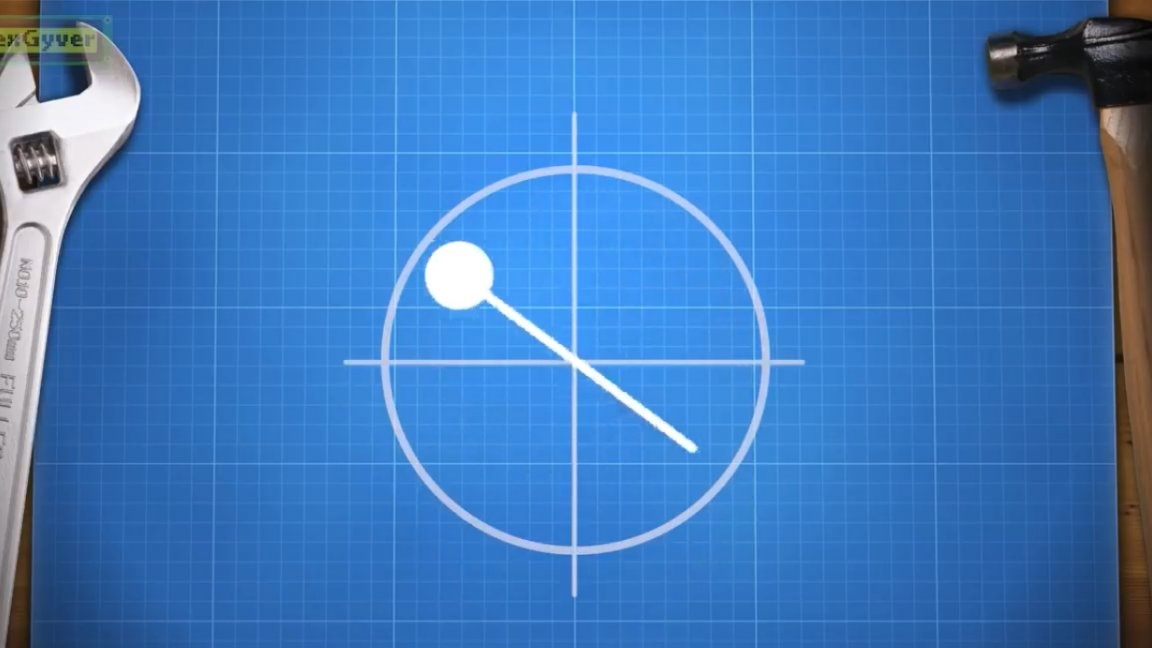
Mutta se ei ole niin yksinkertaista kuin miltä näytti. Siksi ensimmäinen tekijä, jonka tekijä teki, oli polaarikoordinaattijärjestelmä, jossa voit asettaa silmän ja säteen kiertymiskulman, toisin sanoen oppilaan poistamisen keskipisteestä 00.
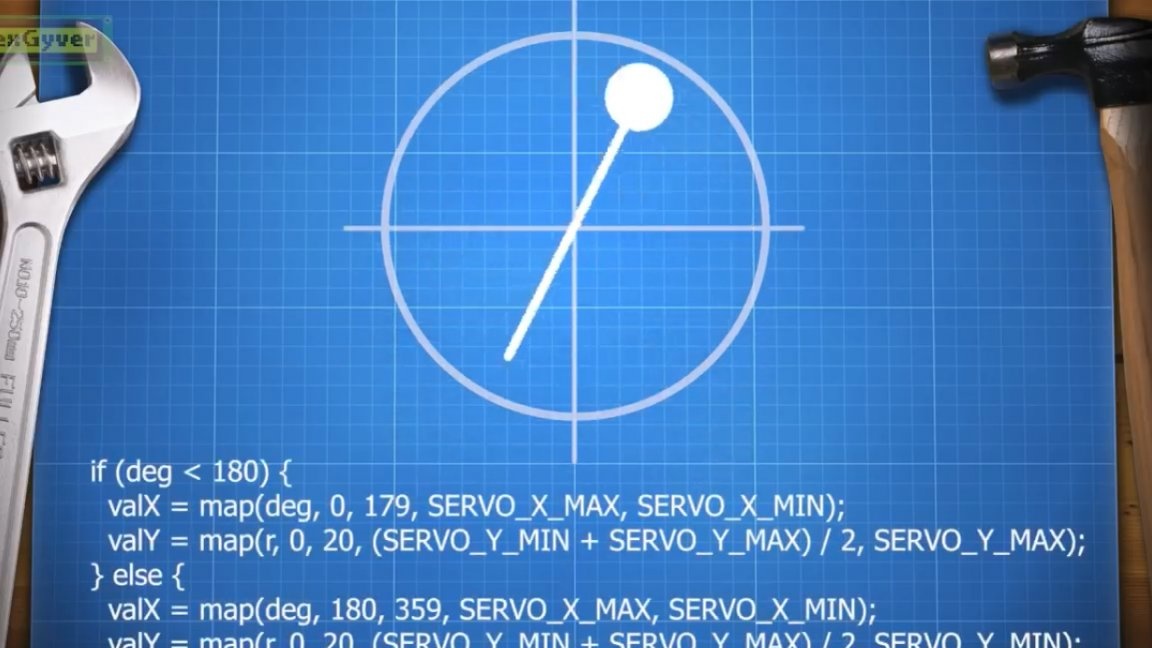

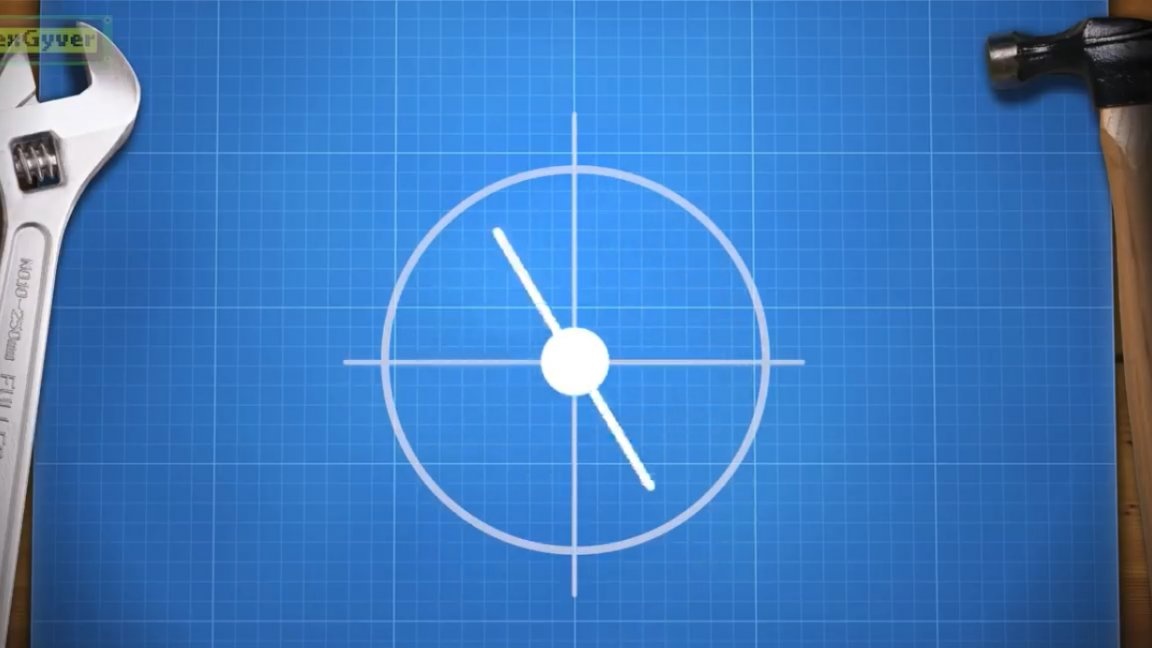
Yläpuoleisessa ympyrässä työskentelemme puolelta kulmasta Y maksimiarvoonsa ja alempana - minimistä puoleen. Nyt silmien liike voidaan ohjelmoida mielenkiintoisemmalla tavalla. Itse liikkeet ovat satunnaisia, mutta jo ympäri kehää.


Juotataan nyt kaikki elektroniikka, kaikki on kuten kaaviossa:
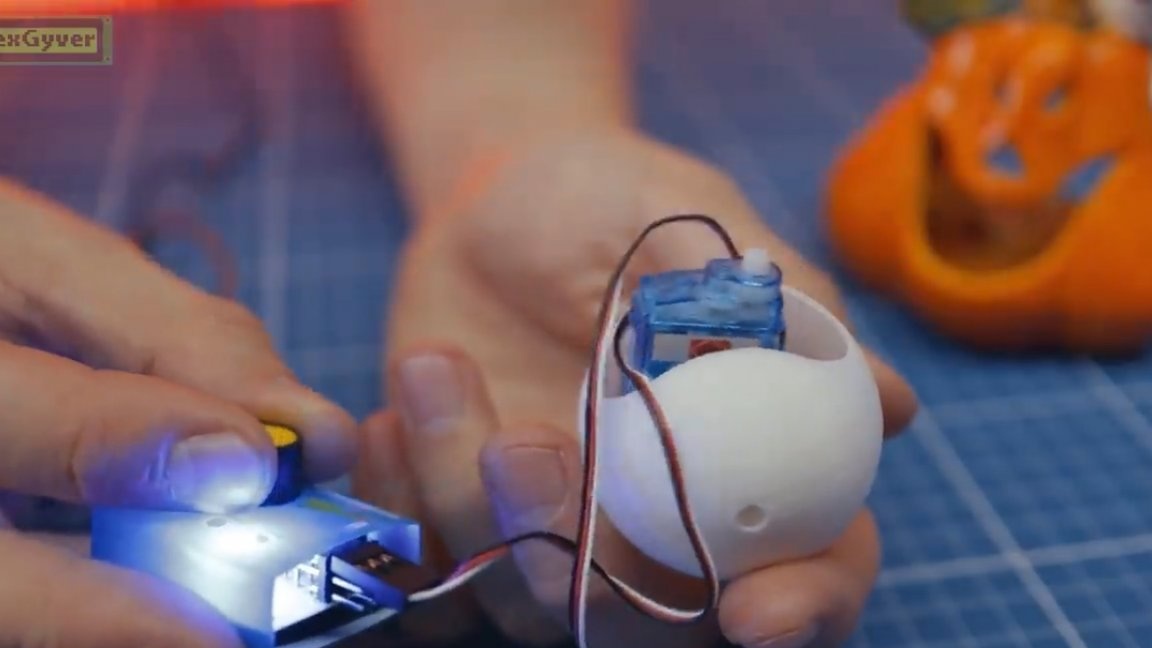
Yritetään kytkeä se päälle.
Merkintä on. Nyt me piilotamme koko asian jonkinlaisessa rakennuksessa (tässä tapauksessa kirjoittaja käytti rasti-tac-ruutua).

Kaikki kybersilmämme ovat valmiita. Tässä on sellainen vitsi.


Jatkamme kuitenkin edelleen teoreettista tutkimustamme ja käännämme napakoordinaatistojärjestelmä Cartesian kielelle, myöhemmin ymmärrän miksi.

Kaikki on täällä yksinkertaista, atan2-funktio auttaa meitä, joka palauttaa radiaanikulman –P: stä P: iin, ja hypoteesifunktio, joka laskee hypoteenuksen pituuden samoissa kahdessa koordinaatissa, ja hypoteenus on säde edelliselle toiminnollemme.

Ja niin yksinkertaisella tavalla kokeellinen koehenkilömme voi nyt kääntää silmänsä tarkalleen missä tarvitsemme (ylös, alas, oikealle, vasemmalle).

Joten miksi sitä tarvitaan? Tämä on välttämätöntä, jotta voimme lisätä gyroskooppijonka avulla silmä kääntyy samaan suuntaan kuin pää, mikä näyttää todennäköisesti melko hauskalta. Oikeastaan projekti lisättiin gyroskooppi mpu6050, näin se näyttää kaaviossa:
Vaihda koodi ja varmista, että gyroskoopin lukemat ohjaavat silmää. Suodattimen läpi luonnollisesti.

Joten mitä lopulta saamme? Silmä on hiukan myöhässä pään käännöksen takana, luomalla siten vaikutuksen, että se kääntyy oikealle ja katsoo sinua. Seurauksena on tässä pieni matemaattinen projekti.

lisäys TÄSTÄ. Kiitos huomiosta. Nähdään pian!
Tekijän video: