

Haluatko käydä taistelua robottirobotien välillä? Tutki sitten huolellisesti tätä artikkelia, siinä mestari kertoo sinulle, kuinka tällainen hämähäkki valmistetaan. Katsomme videon selvyyden vuoksi hänen työstään.
Työkalut ja materiaalit:
Hämähäkki
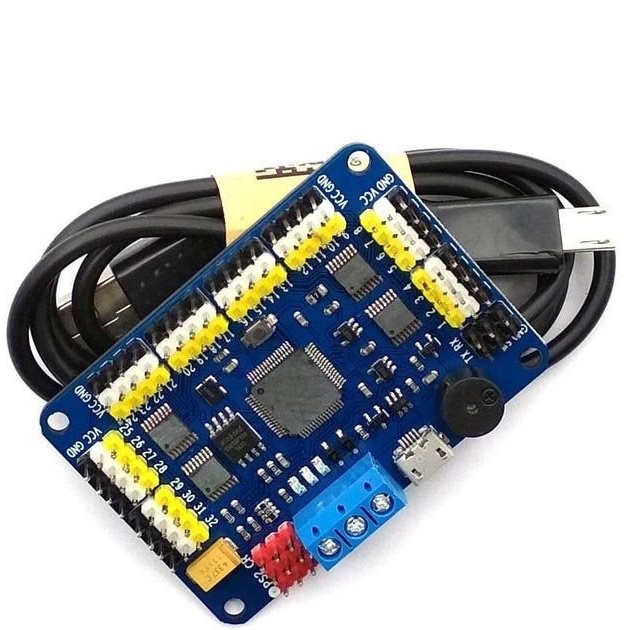
32-kanavainen servo-ohjain;
-Wemos D1 Mini -ohjain;
- MG90S-servoasemat - 18 kpl;
-Ubec 6A 5V -ohjain;
- DC-DC-buck-muunnin;
- Neulepuserot;
-Akkumulyator;
Torniin
-Kaksi moottoria;
-Virta moduuli;
- Laskeva muunnin;
-Servoprivod;
-3D-tulostin;
-Glue ase;
-Kley;
- ruuvimeisseli;
-Krepezh;
- kaksipuolinen teippi;
-Kusachki;
-Nozh;
-Nadfili;
-Muovi pallot;
-Juotto tarvikkeet;






Vaihe yksi: Osien tulostaminen
Ensin sinun on tulostettava rungon ja jalkojen yksityiskohdat 3D-tulostimella. Voit ladata tiedostoja tulostamista varten linkki.


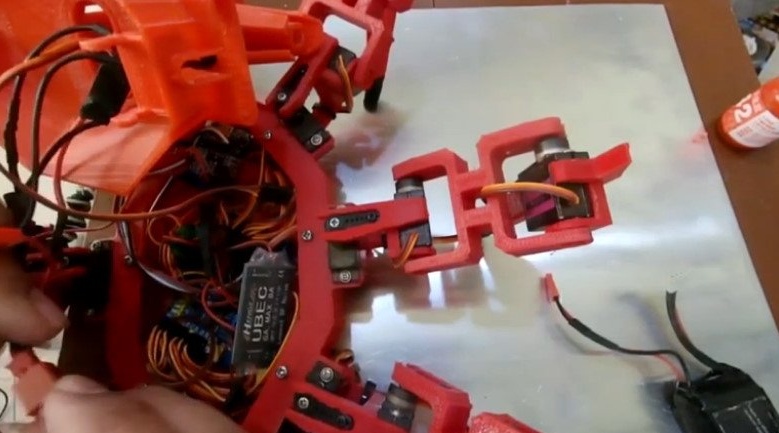
Vaihe toinen: Rakenna
Nyt sinun on kerättävä robopauk.
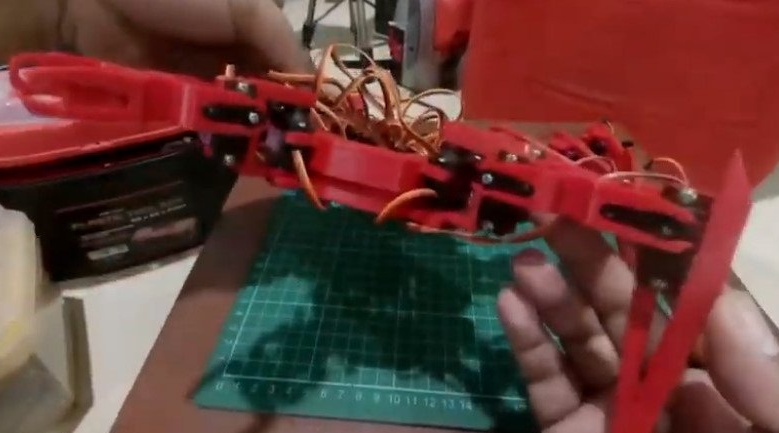
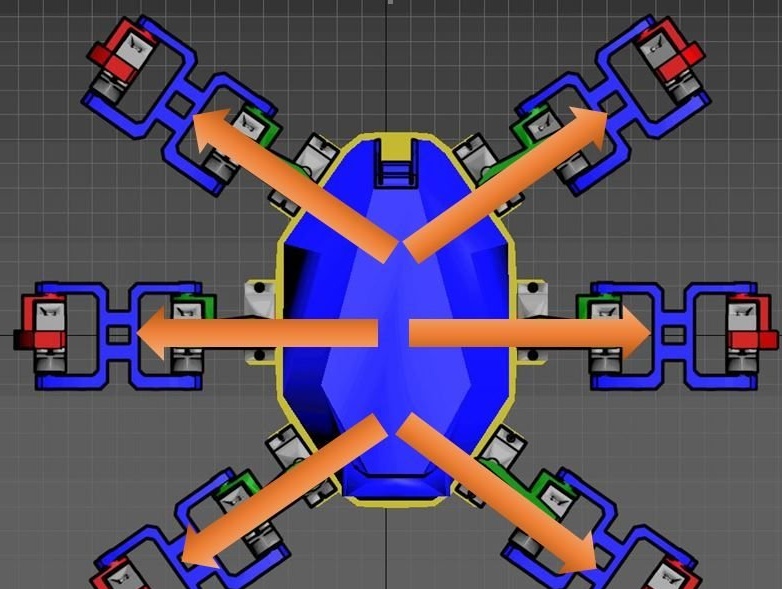
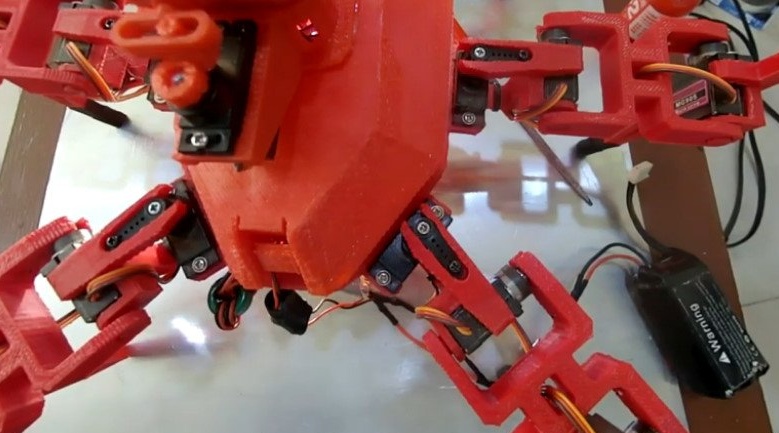
Mestari asentaa servot hämähäkin jalkojen niveliin. Yhteensä robotilla on kuusi jalkaa ja kolme servosta kummassakin jalassa.








Asentaa servit alustalle.




Kiinnittää jalkojen ensimmäiset nivelet korin servoihin.




Johdot vedetään teknisiin reikiin ja liitetään ohjaimeen.





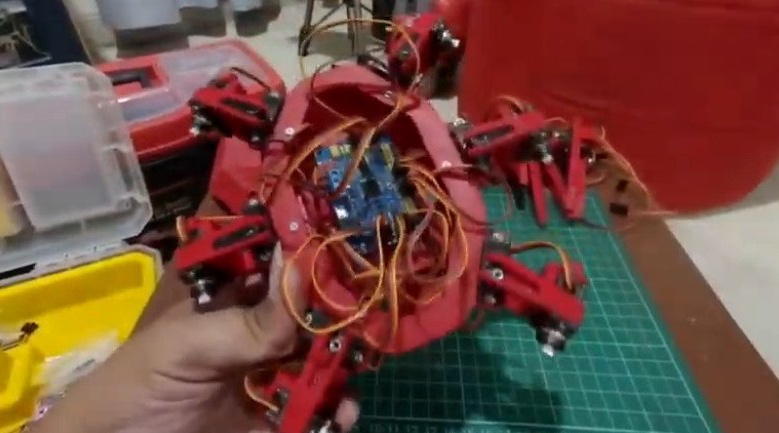
Asentaa tynkyt.


Perustaa jalkojen toiset nivelet. Kytkee johdot servoista ohjaimeen.






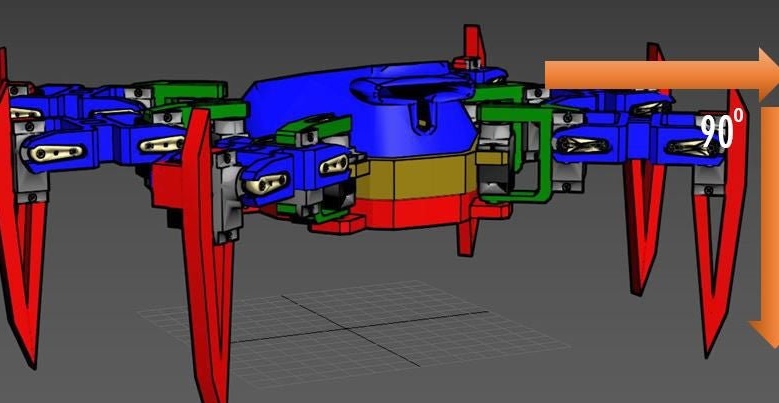
Asentaa kolmannen liitoksen. Tämän liitoksen avulla hämähäkki asettuu pintaa vasten liikkuessa.



Yhdistää ja tarkastaa kunkin servoaseman toiminnan.



Jos kaikki tavallisesti kiinnittää johdot siteillä, asentaa akun ja sulkee kannen.



Rakennusprosessi näkyy videossa.
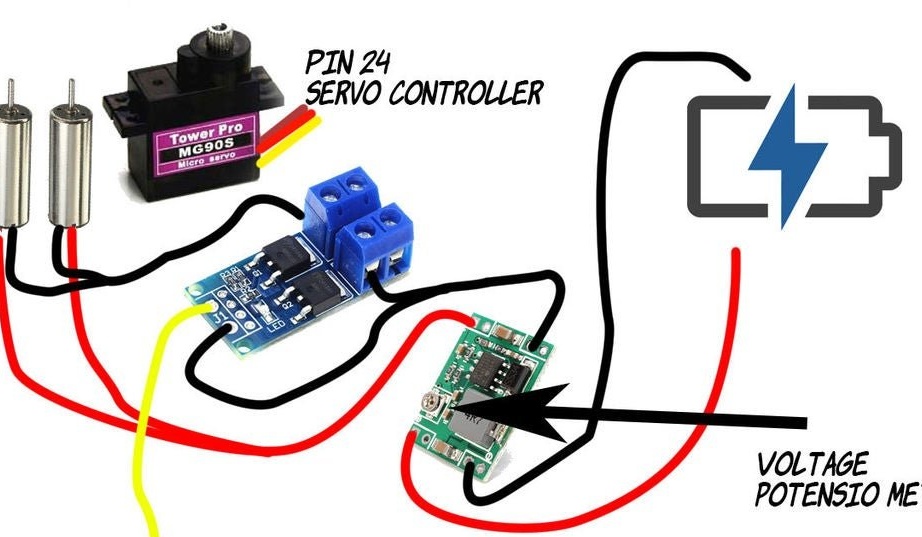
Vaihe kolme: Tietoja elektroniikka
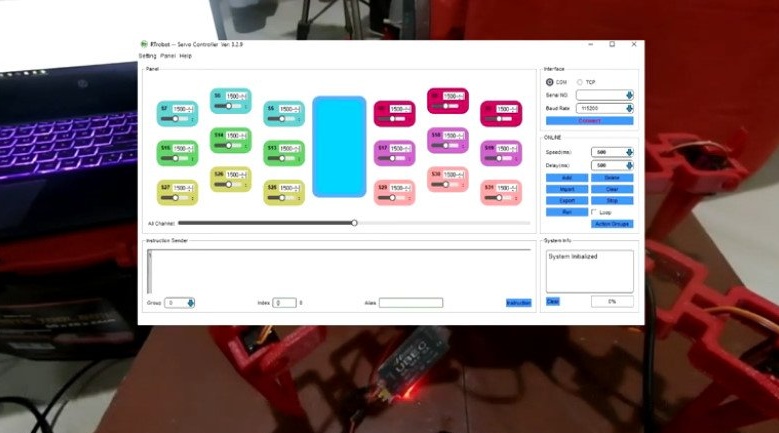
Ohjattu toiminto käytti RTrobot-servo-ohjainta liikkeiden ohjaamiseen. Hallintaohjelma voidaan ladata täällä tai täällä.
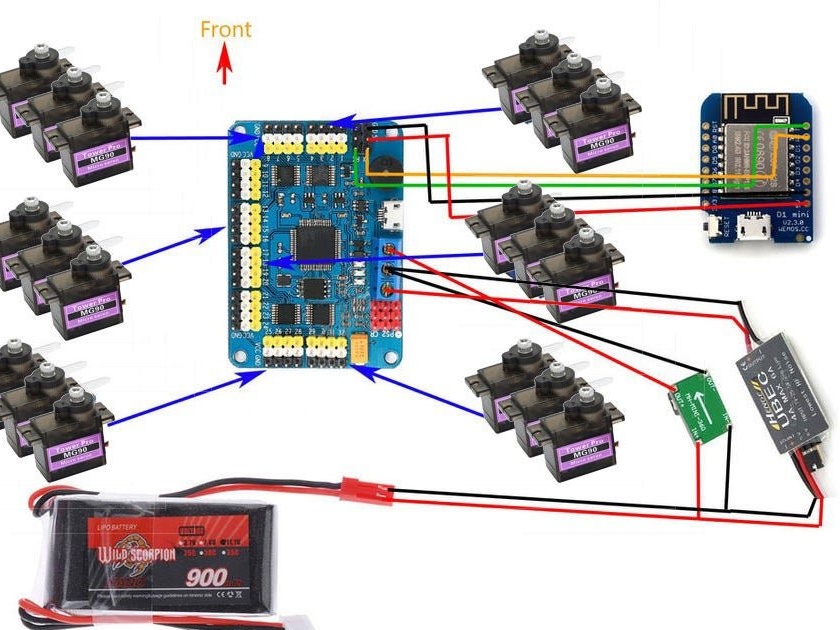
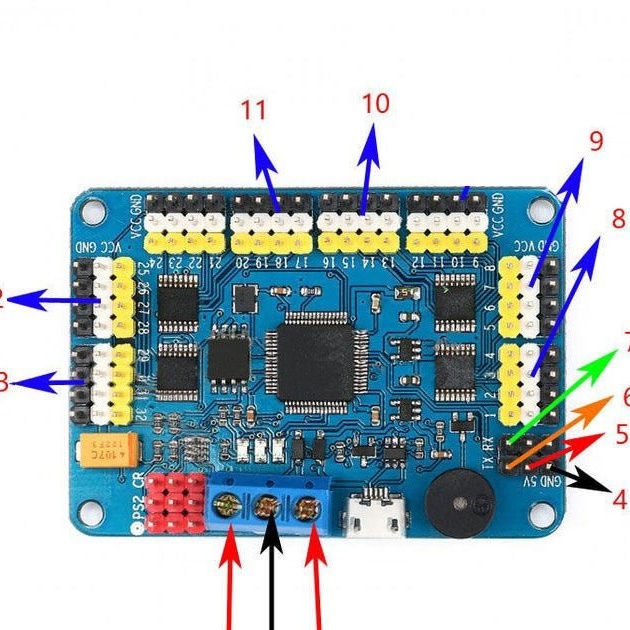
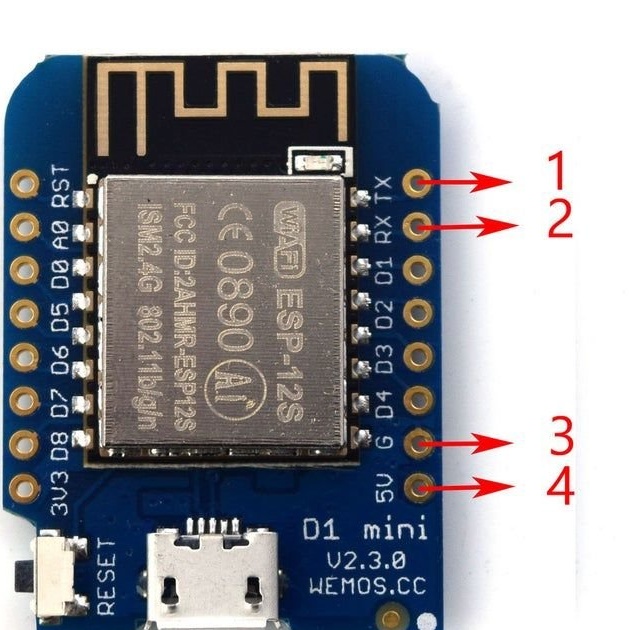
Kaikki on kytketty seuraavasti:
1. 5 V (+) UBEC-lähtö
2. Maa UBEC: stä ja buck-muuntimesta
3. 5 V: n virtalähde (+) muuntimelta
4. Wemos D1 mini G -tappilla
5. Wemos 5v: lle
6. Wemos D1 RX: lle
7. Wemos TX
Servo-asemat on kytketty napoihin 8 - 13.
Asenna koodi NodeMCU: hon. Voit ladata sen täällä.
WeMos D1 mini on vähintään ESP8266-Wi-Fi-kortti.
Käyttämällä wemos D1 mini -sovellusta WIFI-tukiasemana, voit lähettää sarjakomennon servo-ohjaimeen. Tarvitsee vain salata nodeMCU-kortti koodilla, ja voit yhdistää älypuhelimen nodeMCU AP: hen. Siirry sitten verkkoselaimen avulla osoitteeseen http://192.168.4.1.
Se on tärkeää.
kun kytket servon päälle, kaikki servit siirtyvät alkuperäiseen / vakioasentoon
Asenna servot mahdollisimman tarkasti, kuten yllä olevassa kuvassa tai videossa esitetään
säädä nivelten asentoa, kytke laite pois päältä ja uudelleen päälle varmistaaksesi, että kaikki jalat ovat oikeassa asennossa
Jos nivelet takertuvat, hiero, säädä asentoa.
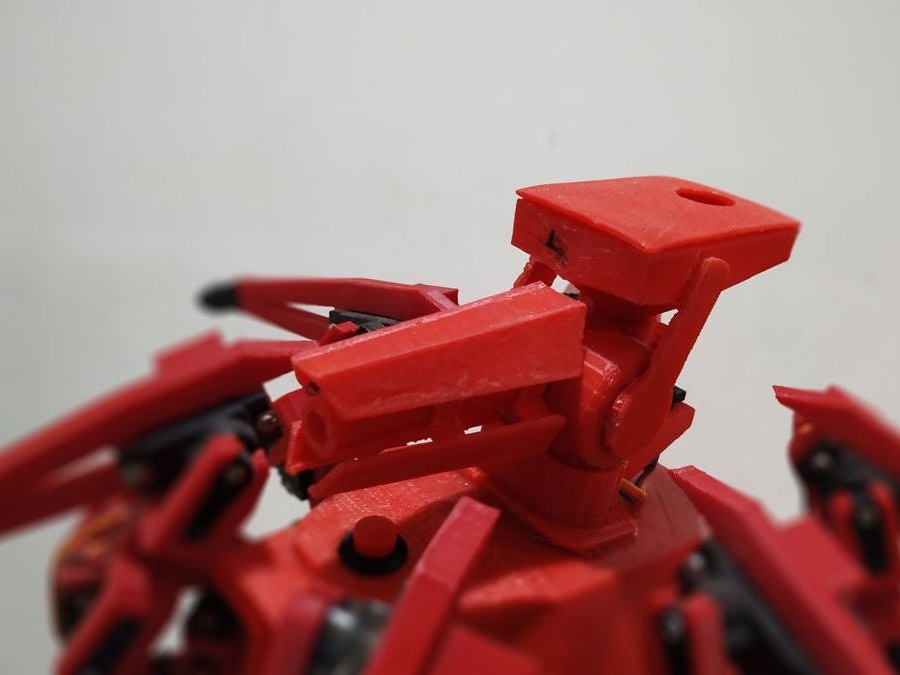
Vaihe neljä: Torni
Nyt siirrymme torni kokoonpanoon.
Ensin on painettava tornin yksityiskohdat. Voit ladata tiedostoja tästä linkki.
Sitten päällikkö jatkaa tornin kokoamista. Piiri tornin kääntämiseksi ja sähköosien kytkemiseksi on alla.
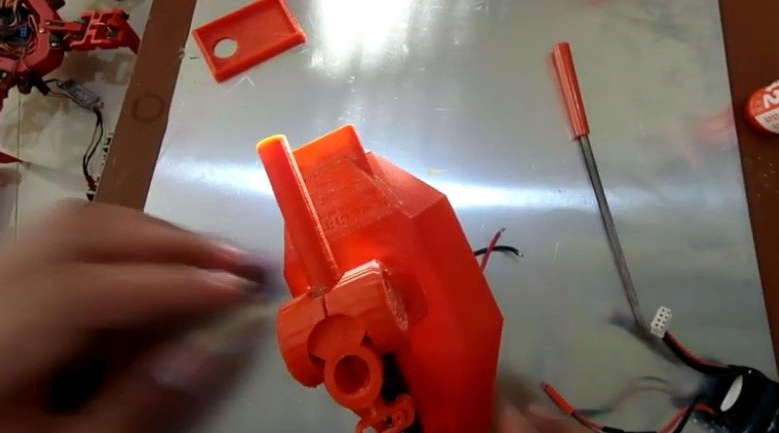
Asentaa servon torniin.







Kaksipuolinen teippi tarttuu teloihin.


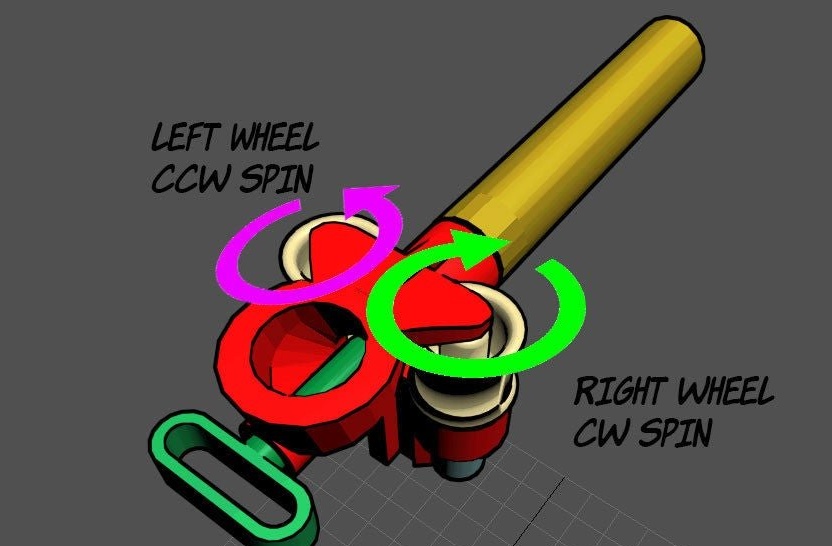
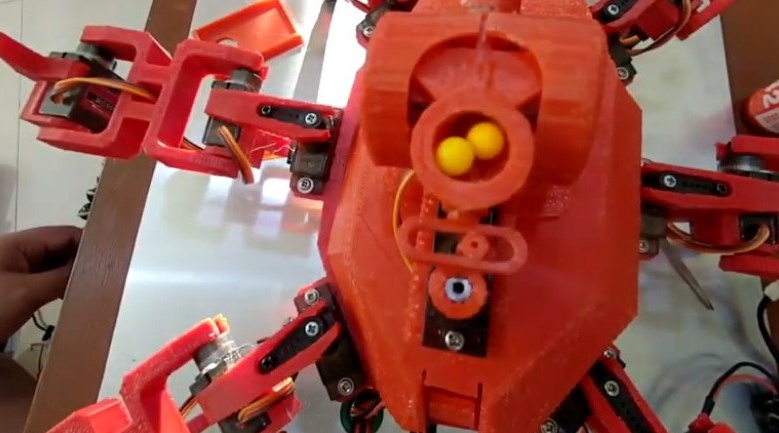
Kerää aseen. Asentaa moottorit pidikkeeseen. Asentaa rullat moottorin akseleille.







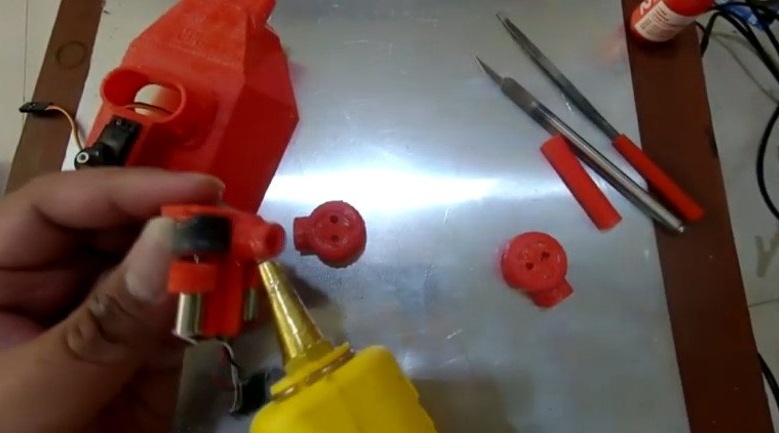
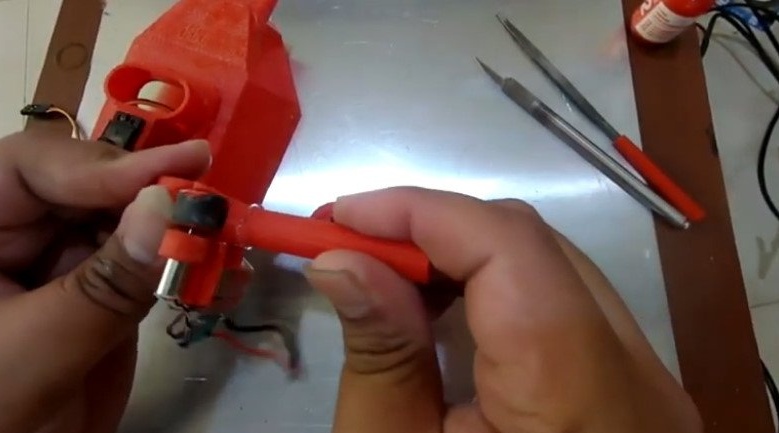

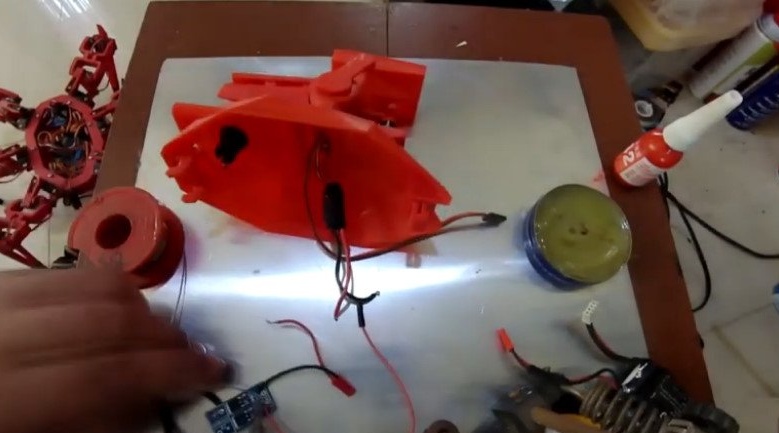
Yhdistää johdot ja kerää tornin.




Lataa kuoret ja tarkastaa aseen toiminnan. Mekanismia voidaan säätää siirtämällä pidikettä servoakselilla.


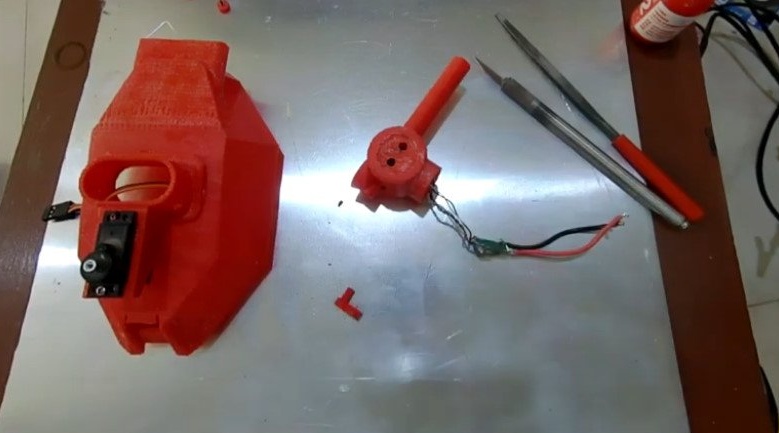
Se tekee lopullisen kytkemisen, kokoamisen ja tarkastuksen.




Video tornin kokoonpanosta löytyy alla.
Kaikki on valmis. Kerää vielä yksi tällainen robopauk ja voit järjestää taisteluita.
