

Usein foorumeilla on kysymyksiä siitä, kuinka tehdä pieni robotti tee se itse improvisoiduista materiaaleista. Joku haluaa testata vahvuutensa ja taitonsa minirobotien luomisessa, ja joku haluaa vain yllättää ystäviä tai lapsiaan. Itse asiassa kaikki on melko yksinkertaista, sinun on vain osoitettava vähän kärsivällisyyttä ja kekseliäisyyttä.
Tuomme huomioosi seuraavan videon:
Pienen hyönteisrobotin luomiseen tarvitset:
- puutarhavalaisin (aurinkoakku);
- kaksi kondensaattoria;
- moottori;
- transistori VD135;
- transistori A733P;
- LED;
- vastus;
- juotosrauta;
- kuparilangat;
- veitsi;
- kuuma liima;
- paperiliittimet.
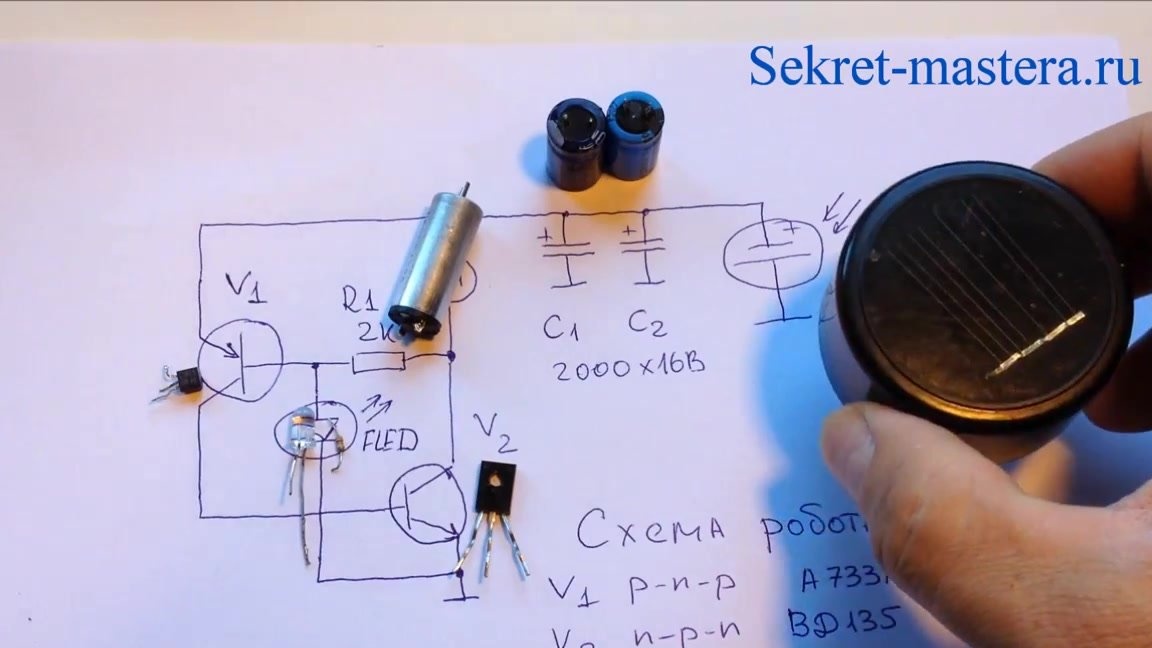
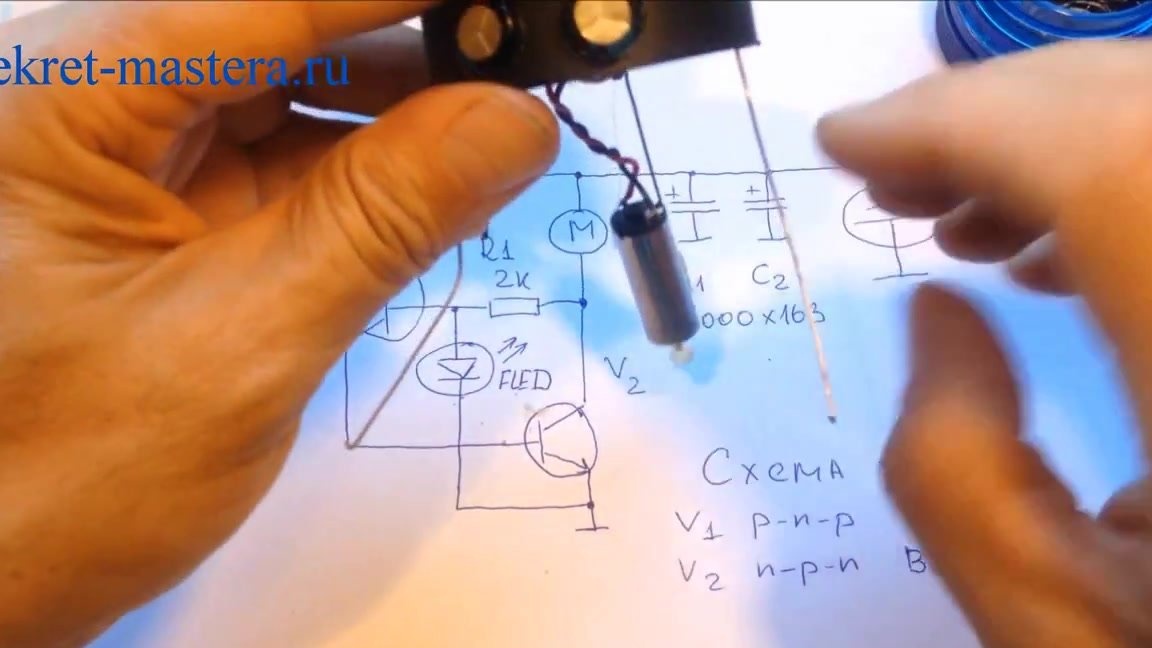
Kunkin kondensaattorin kapasitanssi on 2000 μF, nimellisjännitteelle 16V.
Moottoria voidaan käyttää vanhasta hammasharjasta, ja moottoria voi käyttää myös vanhasta filmikamerasta.
Voimakas transistori (on sallittua korvata se keskitehoisella transistorilla), n-p-n-rakenne, tässä tapauksessa VD135.
P-n-p-rakenteen toisessa transistorissa käytetään tässä tapauksessa A733P: tä.
Vilkkuva LED, joka antaa vilkkua säännöllisin väliajoin.
2 kΩ vastus.

Kun kaikki tarvittavat radioelementit on valmisteltu, pääsemme töihin.
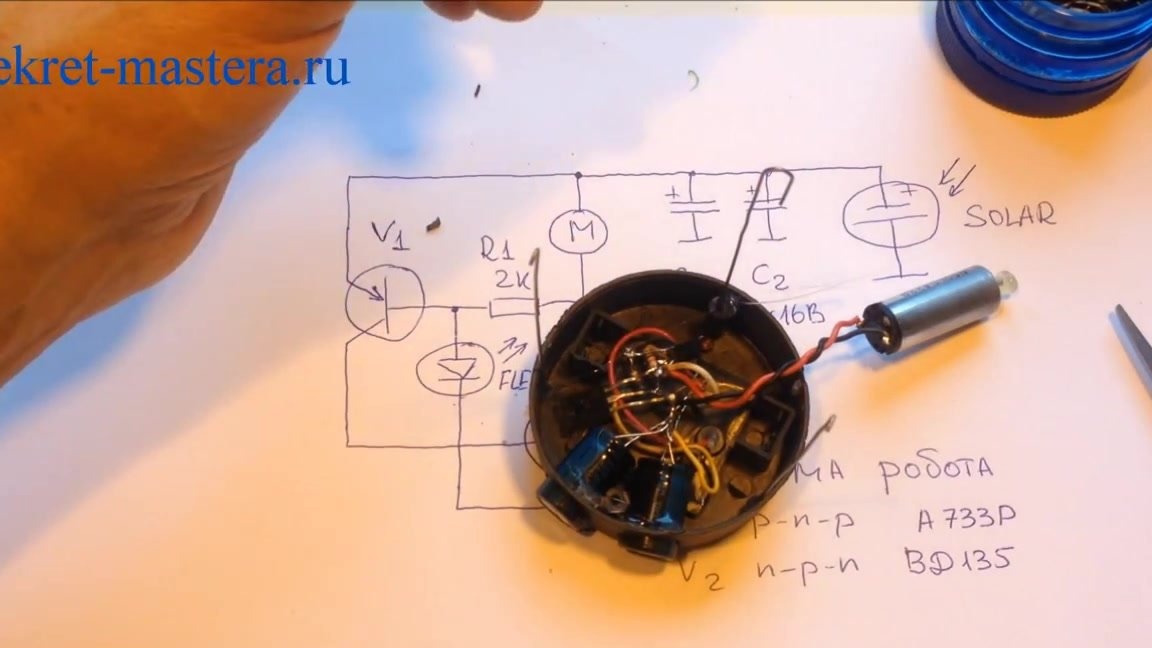
Toimintaperiaate:
Aurinkoakun energia kerääntyy kahteen kondensaattoriin ja tietyllä taajuudella LED-valo aktivoituu, mikä toimittaa virtaa moottorille voimakkaan avaintransistorin kautta. Tässä tapauksessa moottori purkaa kondensaattorin ja suorittaa joitain kiertoliikkeitä.
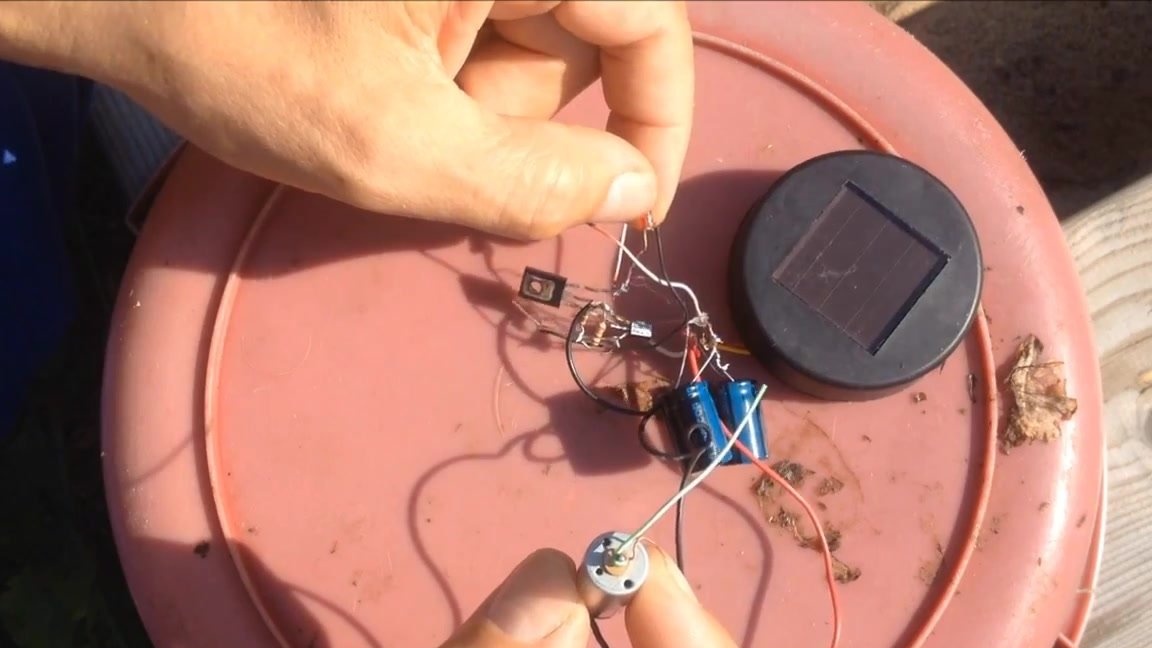
kokoonpano:
Aurinkoakun tapauksessa teemme kaksi reikää veitsellä ja asetamme kondensaattorit niihin - nämä ovat hyönteisten silmät. Kiinnitämme ne kuumasulaliimalla.
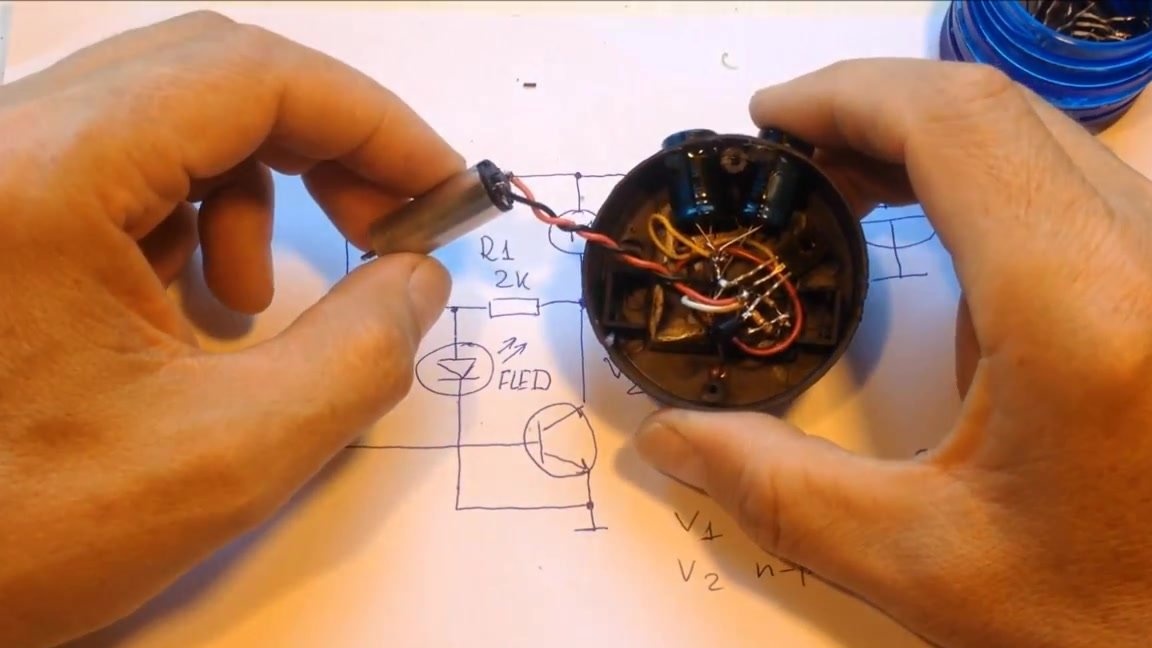
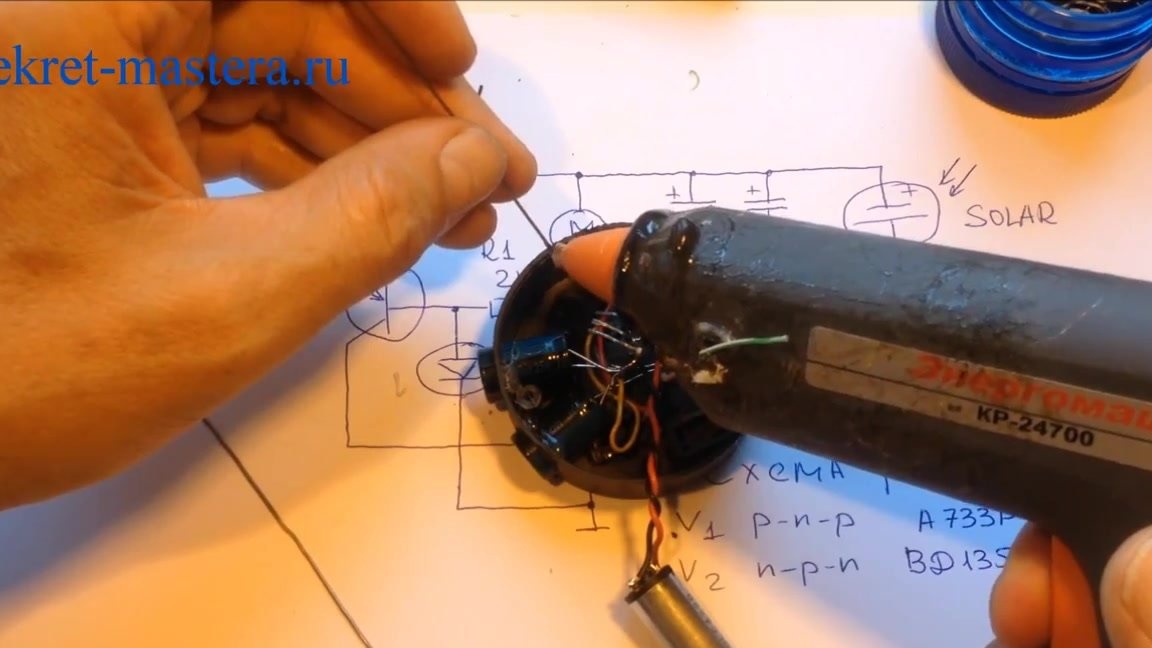
Keräämme sitten kaikki juotosraudat ja johdot käyttämällä kaikkia radioelementtejä järjestelmän mukaan.
Kaikki elementit on kiinnitetty aurinkoakun kotelon sisäpuolelle, pitkänomaiseen johtoon jätetään vain moottori emmekä kiinnitä sitä.
Moottorin akselin kärkeen levitetään suuri tippa liimaa. Voit jopa muodostaa useita kertoja pienen pallon muodostamiseksi kärkeen.
Valmistamme hyönteisten jalat tavallisista paperiliittimistä.Suorista paperiliitin jättäen vain pienen kärjen jäykistymättä ja kiinnitä se runkoon kuumasulaliimalla. Meillä on yhteensä kolme jalkaa.
Kiinnitämme moottorin toiseen jalkaan, niin robotti nojasi palloon, joka oli muodostettu sen päähän.
Voit myös antaa jalkoille tarvittavan muodon, taivuttaa tai suoristaa hiukan.
