

Sellaisen robotin valmistus omilla käsillä ei ole ollenkaan vaikeaa ja edes mielenkiintoista. Tuloksena on erittäin mielenkiintoinen laite, joka käyttäytyy kuin elävä olento. Kaikki tämä kahden pienen moottorin ansiosta he ajavat robottia. Muuttamalla moottorin akselien hyökkäyskulmaa voit tehdä robotista nopeamman tai hitaamman. Voit myös kokeilla erilaisia vinkkejä, joita voidaan käyttää moottorin akselilla.
Materiaalit ja työkalut:
- kaksi pientä moottoria (3 volttia, löytyy lasten leluista);
- paristopidike (voit tehdä sen itse tai vetää sen pois vanhasta kaukosäätimestä, taskulampusta jne.);
- kaksi SPDT-tyyppistä kytkintä (ne voidaan hankkia vanhasta tietokonehiirestä);
- kaksi pientä ja yksi iso paperiliitin;
- pieni pyörä lelusta;
- ohut johdotus

Valmistusprosessi:
Ensimmäinen askel. Juotosjohdotus
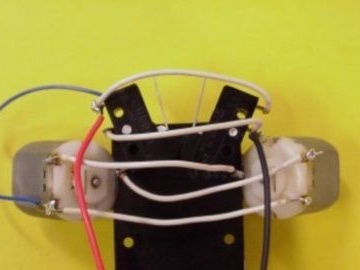
Ensinnäkin johdot on valmisteltava ja juotettava ne kaikkiin elektronisiin komponentteihin, jotta myöhemmin on helppo yhdistää solmut. Johdot on leikattava 6 cm: n pituiseksi ja poistettava niiden päistä noin 1 cm: n verran. Nyt sinun täytyy juottaa kaksi johtoa moottoreihin ja kytkimiin. Muista myös juottaa kaksi johtoa paristokotelon koskettimiin. Johtimien muut päät on edullisesti tinattu.

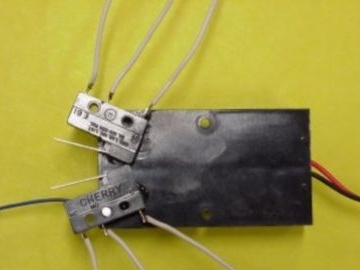
Vaihe toinen Kytkinten asettaminen
Kytkimien asettamiseksi akun pidike on käännettävä ylösalaisin. Nyt sinun täytyy liimata kytkimet liimalla akun pidikkeeseen. Seurauksena V-kirjaimen tulisi muodostua.
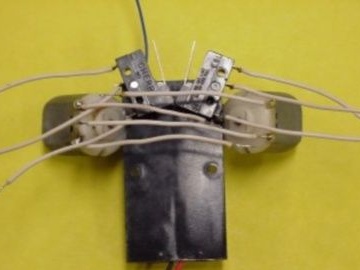
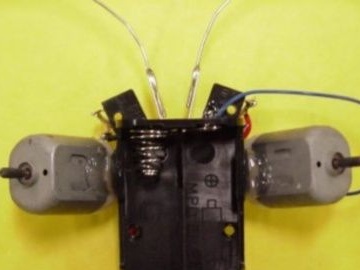
Vaihe kolme Moottorin asennus
Moottorit on kiinnitettävä akkupidikkeeseen kuvan osoittamassa kulmassa. Muutoin molemmin puolin olevien kulmien on oltava samat robotti ei toimi kunnolla. Moottorin akselien on oltava tien päällä. Moottorit voidaan asentaa liimalla.

Vaihe neljä Vakaajapyörän asennus
Vakaaja tarvitaan kotitekoinen tuote seisoi tasaisena tien päällä. Pyörän valmistamiseksi voit käyttää nauhurin telaa tai lasten lelun pyörää. Mitä tulee "tulppaan", se on tehty pitkästä paperiliittimestä tai narusta.Yhteenvetona voidaan todeta, että stabilisaattori tarttuu tasaisesti akun pidikkeeseen.

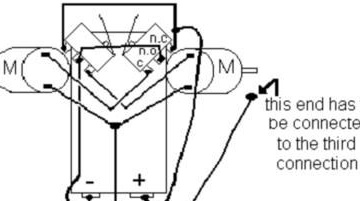
Vaihe viisi Johdotusliitäntä
Jotta robotti toimisi oikein, kaikkien johtimien on oltava kytketty selkeästi järjestelmän mukaan. Piiri näkyy kuvassa.

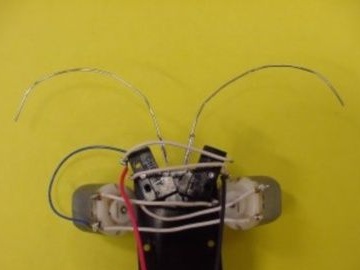
Vaihe kuusi Viiksien tekeminen bugille
Viikset toimivat kovakuoriaisen pyöränä, heti kun este kohtaa matkallaan, viikset kytkeytyvät kytkimiin ja moottorit kääntävät robotin toiseen suuntaan. Kun kytkin aktivoidaan, yksi moottoreista sammuu ja eräänlainen differentiaali laukeaa. Jos molemmat kytkimet aktivoituvat, robotti pysähtyy kokonaan. Viikset on valmistettu pienistä paperiliittimistä, ne on liimattava huolellisesti kytkinten painikkeisiin.

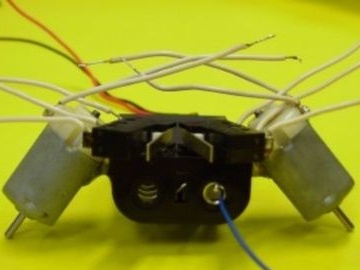
Seitsemäs vaihe. Robotin lopullinen versio ja testaus
Viimeisessä vaiheessa moottorin akseleille on asennettava kumikärjet, joita tarvitaan parempaan otteeseen. Ne voidaan valmistaa kambrista.
Siinä kaikki, robotti on valmis. Sinun on käytettävä sitä sileällä pinnalla, esimerkiksi pöydällä tai linoleumilla. Koska kovakuoriaisen käpälät ovat liian pienet, se ei indeksoi mattoa pitkin, tätä varten moottorin akseleiden kärkejä on tarpeen lisätä.
Jatkossa robotti voidaan päivittää oman harkintansa mukaan. Hän voi esimerkiksi tehdä LED-silmiä, jotka syttyvät, kun ne ovat kosketuksissa esteeseen.