
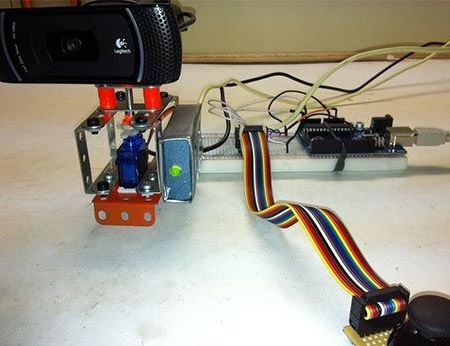
Tässä artikkelissa kerrotaan käytöstä Työläs voi hallita web-kameraa. Tarkemmin sanottuna ohjaus on servo-asema, joka asennetaan kehykseen suunnittelijalta, johon verkkokamera jo asennetaan.
Materiaalit, joita tekijä on käyttänyt tämän laitteen luomiseen:
1) metallirakentaja
2) kylmähitsaus
3) verkkokamera
4) servo
5) LEDit
6) Arduino
8) PS3: n ohjaussauva
Mieti tarkemmin kameran hallintalaitteen luomisen suunnittelua ja pääkohtia.
Hämmentynyt kysymys siitä, kuinka käyttää tällaista kätevää Arduino-alustaa tavallisten toimintojen, kuten vilkkuvien valojen, lisäksi. Kerran keskustellessaan Skypen kautta työtoverin kanssa kirjailija esitti mielenkiintoisen idean. Entä jos annat hänen kollegoilleen mahdollisuuden hallita web-kameraa ja katsella mitä toimistossa tapahtuu. Ei aikaisemmin sanottu kuin tehty, ja kirjoittaja aloitti työn idean toteuttamiseksi.
Aluksi kirjoittaja tutki artikkeleiden päämateriaaleja, joissa ohjaussauvaa käytettiin Arduino-alustalle luotujen yksiköiden ohjaamiseen. Ymmärtänyt näiden artikkeleiden aineiston kirjailija tajusi voivansa käyttää PS3: n vanhaa ohjaussauvaa hallitakseen servon liikkeitä häneltä.
Alkaen rakentaa, kirjoittaja päätti rakentaa kehyksen, johon servo-asema ja itse kamera sijoitetaan. Jotta tehtävä ei monimutkaistuisi, kirjoittaja päätti käyttää tavallista metallirakentajaa, jonka hän osti säästäväisyyskaupasta.
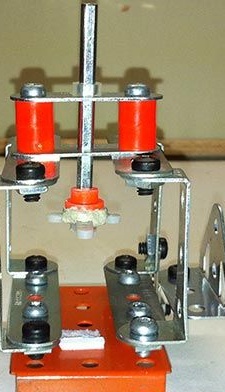
Kun otetaan huomioon tämän rakentajan yksityiskohdat, kävi ilmi, että luodaan tulevaisuuden laitteelle tällainen kehys:
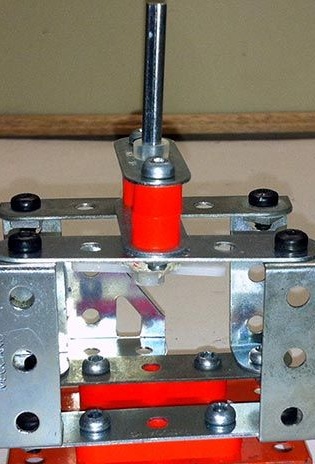
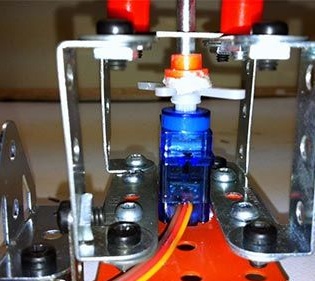
Servo-asema asennettiin kehyksen sisään. Kuten kuvasta voidaan nähdä, se sopii täydellisesti luotuun kehykseen. Servo kiinnittämiseksi kehykseen tekijä käytti kaksipuolista teippiä. Kylmähitsauksella servoakseli kytkettiin hammaspyörään, joka ohjaa lavan liikettä kameran avulla.
On tärkeää varmistaa, että voimansiirtosuunnittelu tehdään edes niin, että turhaa kuormaa ei tule.
Sitten kirjoittaja aloitti verkkokameran asentamisen. Käytettiin Logitech-kameraa, jota käytetään yrityksen toimistossa, jossa kirjoittaja työskentelee. Siksi, koska kamera ei kuulu kirjoittajalle, hän ei purkautanut sitä ja poistanut vastapainon, vaikka tämä yksinkertaistaisi tulevan laitteen suunnittelua.

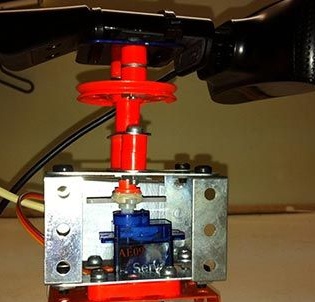
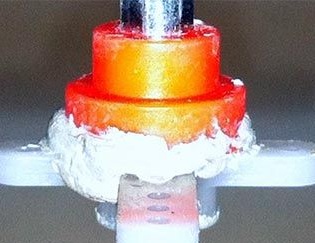
Kameran painon kompensoimiseksi ja jakamiseksi sen rakenteen keskelle kirjoittaja käytti 2 paksua tiivistettä. Niiden avulla voit siirtää kammion painon servoakselista pääkehykseen ja välttää myös akselin paineen itse kammiossa.
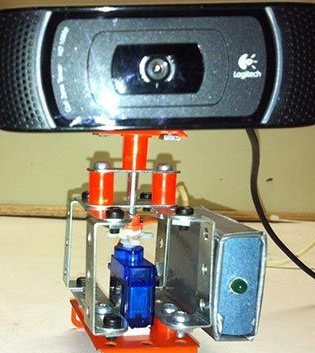
Kamera on asennettu erityiselle pyöreälle alustalle, joka perustuu servovetolaitteesta tulevaan akseliin. Tällä tavalla kameran ohjaus toteutetaan ristiinlähetyksen avulla.
Kun rakenteen mekaaninen osa oli valmis, kirjailija otti sen käyttöön elektroninen täyte.
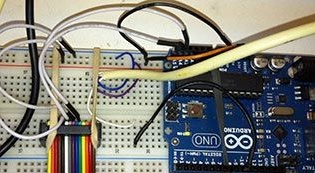
Aluksi hän päätti kytkeä servot ja ledit, jotka osoittavat järjestelmän tilan.
Itse servossa on 3 johtoa: -GND, + 5 V ja signaali. Kirjailija käytti 9 tappia toteuttaakseen kyvyn hallita asemaa. Taajuusmuuttajan aktivointi-indikaattorin tekemiseksi kirjoittaja asensi diodin, joka on kytketty kahteen johtoon: + 5 V ja GND + 5 V johdolla olevalla vastuksella.

Sitten kirjoittaja valmisteli Internetistä kirjoitettujen artikkeleiden perusteella rikkoutuneen ohjaussauvan PS3: lta aseman ohjaamiseksi.

Sitten kirjoittaja haki Arduinolle -ohjelman, jonka ansiosta on mahdollista käyttää ohjaussauvaa ja USB-porttia servon ohjaamiseen. Kommunikoidakseen USB-portin kanssa kirjoittaja käytti modeemiohjausta ja sovelluspääteemulaattoria, kuten Minicom tai Putty.
Tämä ohjelma tarjoaa useita toimintoja kameran ohjaamiseksi.
Asentaaksesi kameran 90 asteen keskustaan, sinun on painettava "m", kamera myös tulee automaattisesti tähän asentoon, kun servon virta kytketään. Kääntääksesi kameraa vasemmalle paina “F” -näppäintä ja painamalla “J” -painiketta kamera kääntyy oikealle.
Voit ladata ohjelman artikkelin lopusta.
Koska tekijä ei erikoistunut laatimaan kameran kiertolaitteen mallia, sillä alkoi olla useita joitain haittoja.
Esimerkiksi: koska kameraa ei ole kiinnitetty kehykseen kallistettaessa, se voi pudota laiturilta; koska servo on melko pieni, kameran vääntömomentti lisää ylimääräistä pyörimistä, mikä puolestaan muodonmuutosta servoa; servoakselin reiät ovat liian suuret, joten se ei ole staattinen ja on myös alttiina rasitukselle.
Siksi tulevaisuudessa kirjoittaja haluaa päivittää laitetta hiukan seuraavasti: varmista, että kameran pyörimistä ohjataan ohjaussauvan nuolilla, ei painikkeilla; kevennä servojen kuormaa kääntyessään.