


Otin osan suunnittelustani Lego Technic 42029: n kokoonpano-ohjeista. Loppuosa on minun improvisointini. Joten tarvitsemme:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (parempi kuin Populus, mutta myös kiinalainen vastine on mahdollista)
- 2 servoajoa SG-90
- IR-vastaanotin
- Moottorin vaihdelaatikko 200 rpm
- 2 LEDiä
- 2 vastuksia 150 ohmia
- Kondensaattori 10v 1000uF
- 2 yhden rivin kampaa PLS-40
- 2 PBS-20-liitintä
- Induktori 68mkGn
- 6 NI-Mn 1.2v 1000mA -paristoa
- Liitin isä-äiti kahden navan johdolla
- Homutik
- Eriväriset johdot
- juote
- Rosin
- paperitavarat
- juotosrauta
- Pultit 3x40 ja mutterit ja aluslevyt
- Pultit 3x60
- Paristot Ni-Mn 1.2v 1000mA 6kpl.
Vaihe 1 keräämme jousituksen takaosan.
Ensin sinun on koottava takajousitus Lego 42029 osan 1 ohjeiden mukaisesti, alkaen 3 sivusta ja kahdeksasta. Lisää seuraavaksi muutama yksityiskohta, jotta voit asentaa moottorin ja vaihdelaatikon.
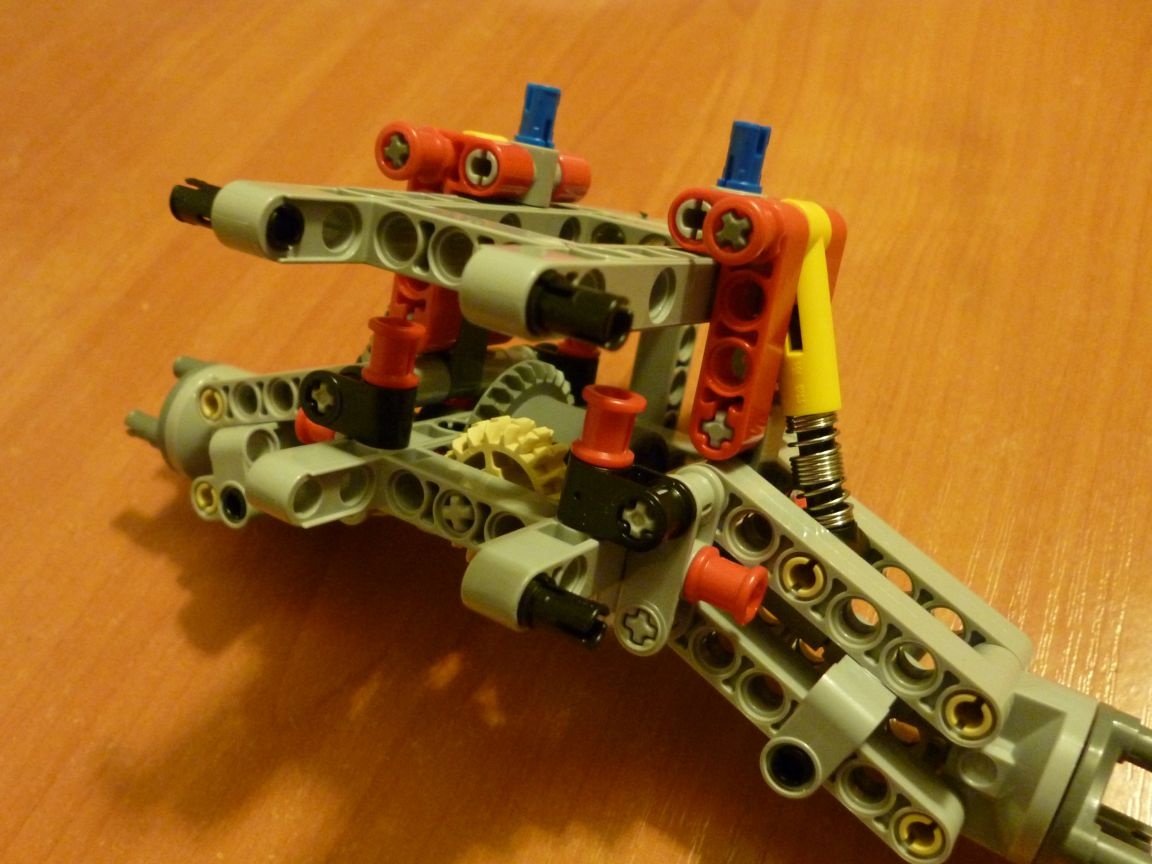
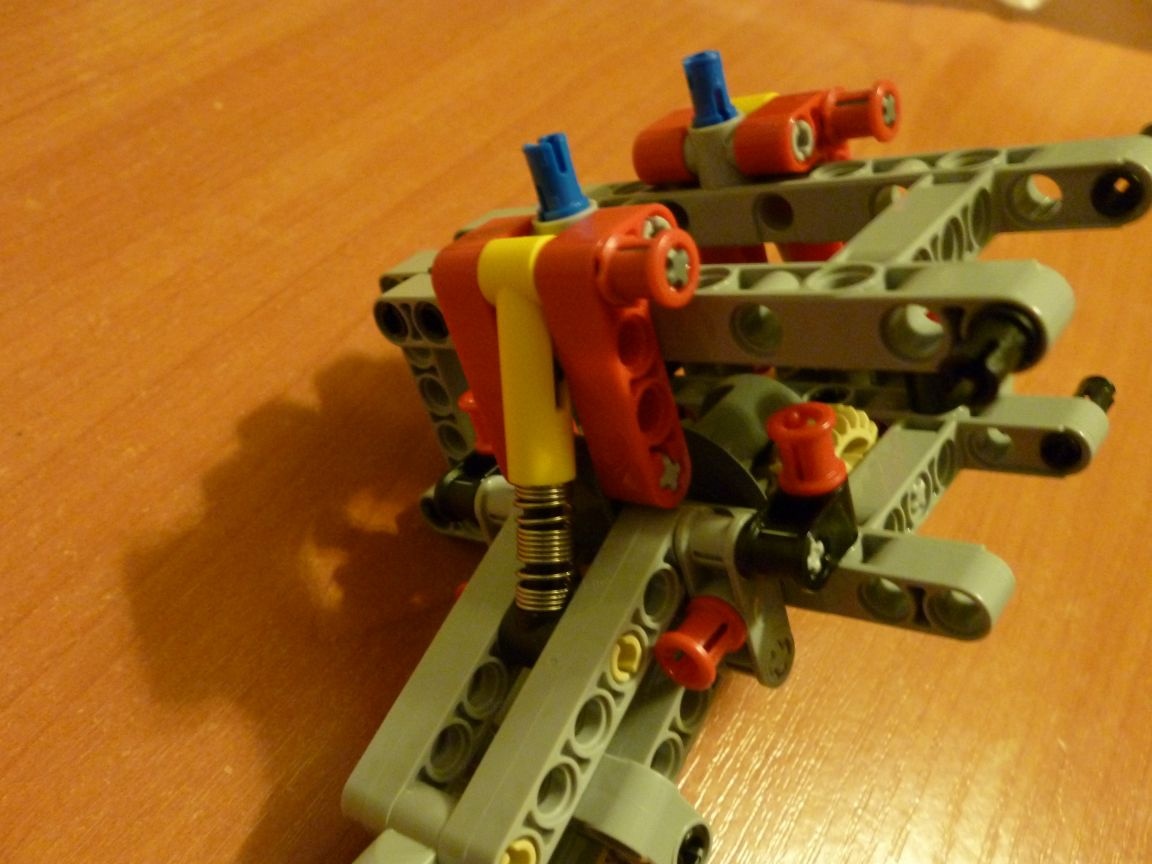

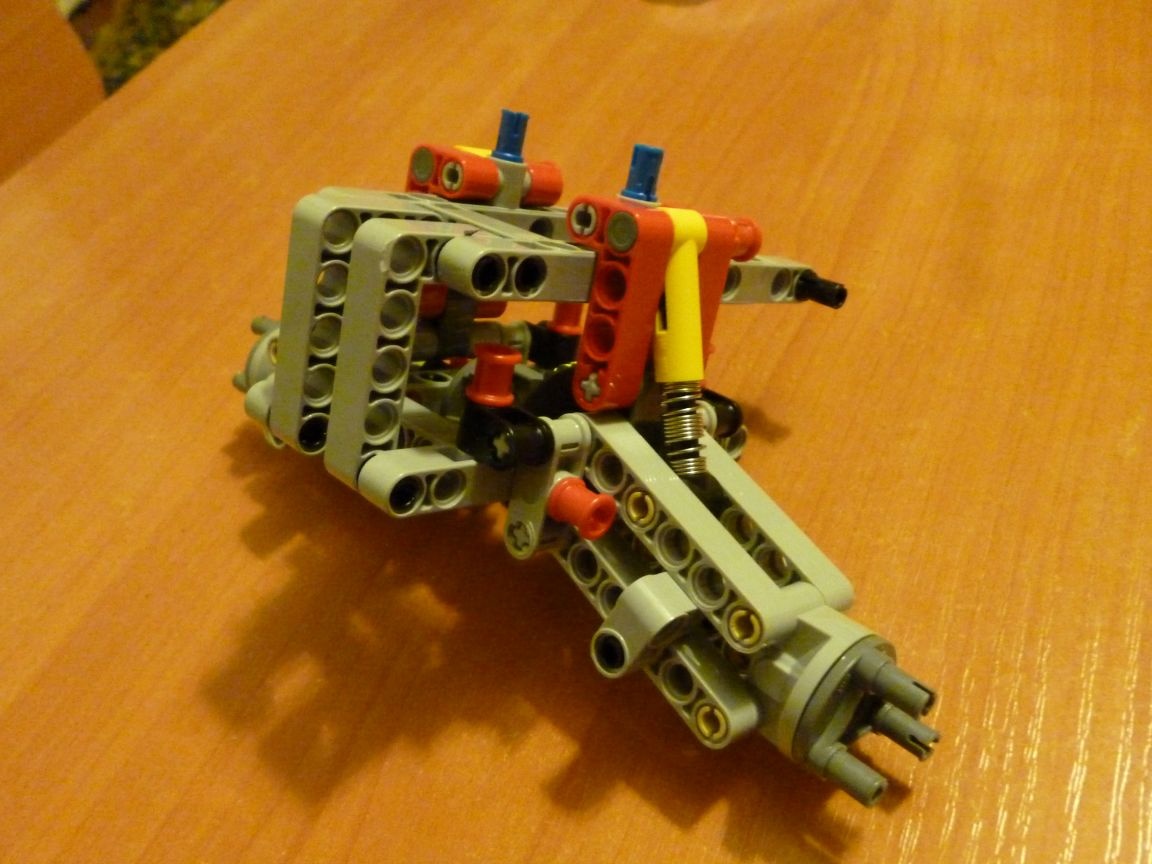
Vaihe 2 etujousitus.
Kokoonpanomme jousituksen etuosan Lego 42029 osan 1 ohjeiden mukaisesti, sivuilta 21 - 23. Otamme trapesoidin Lego-ohjeiden toisesta osasta sivuilta 6-11. Kokoamme vinssin sivujen 14 - 22 toisesta osasta. Puskurin toinen osa on 34-36 sivua.
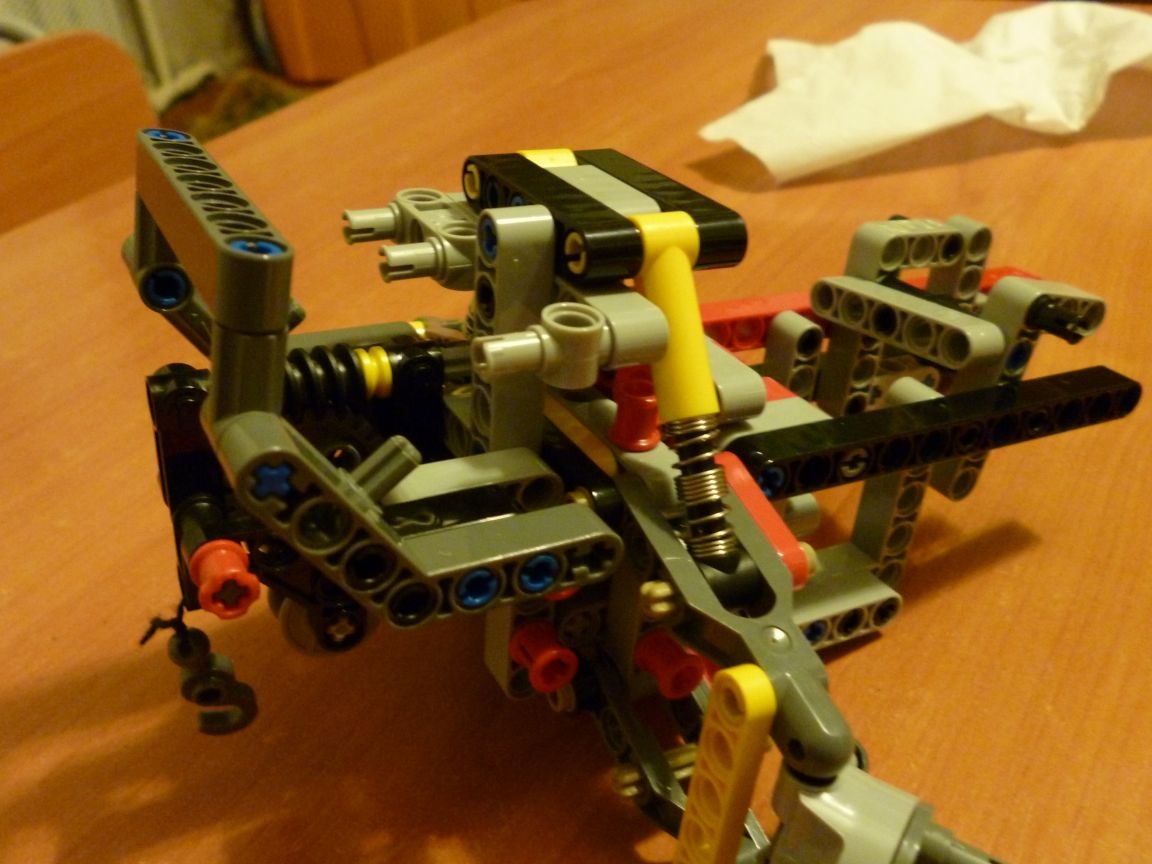
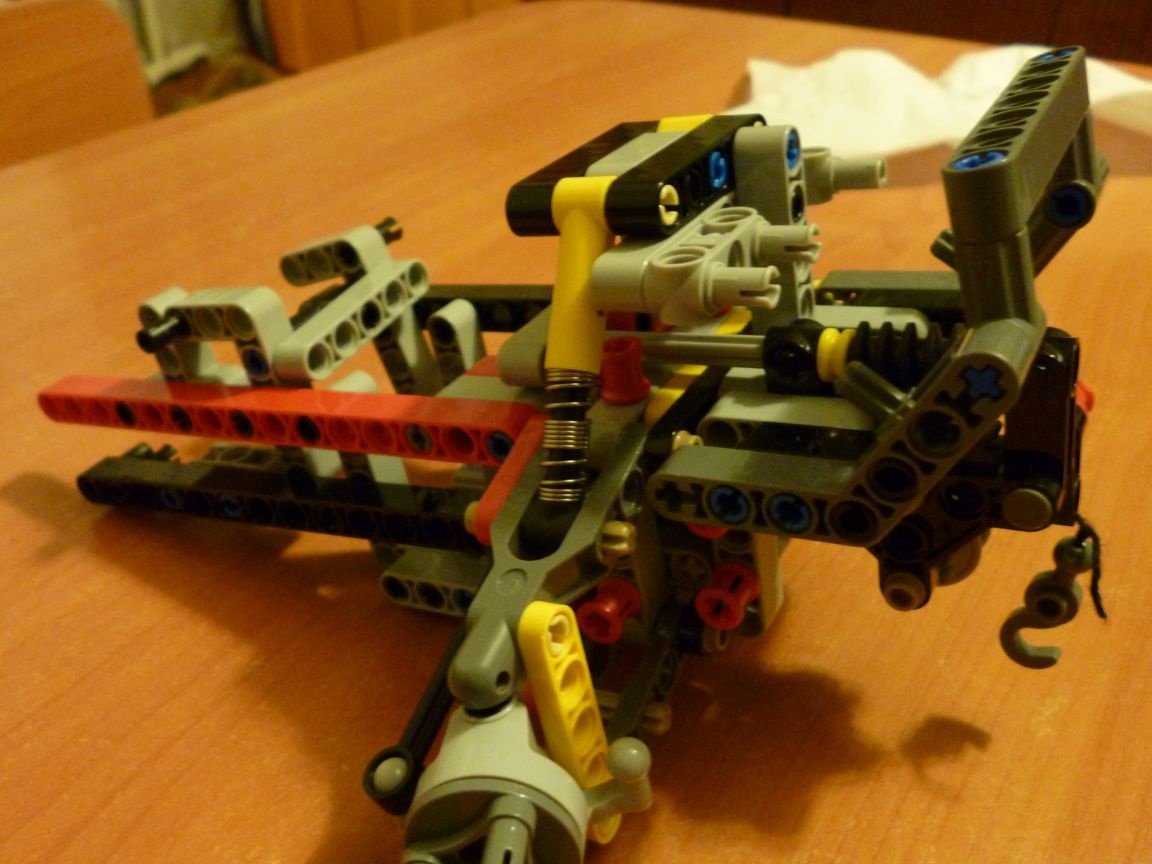
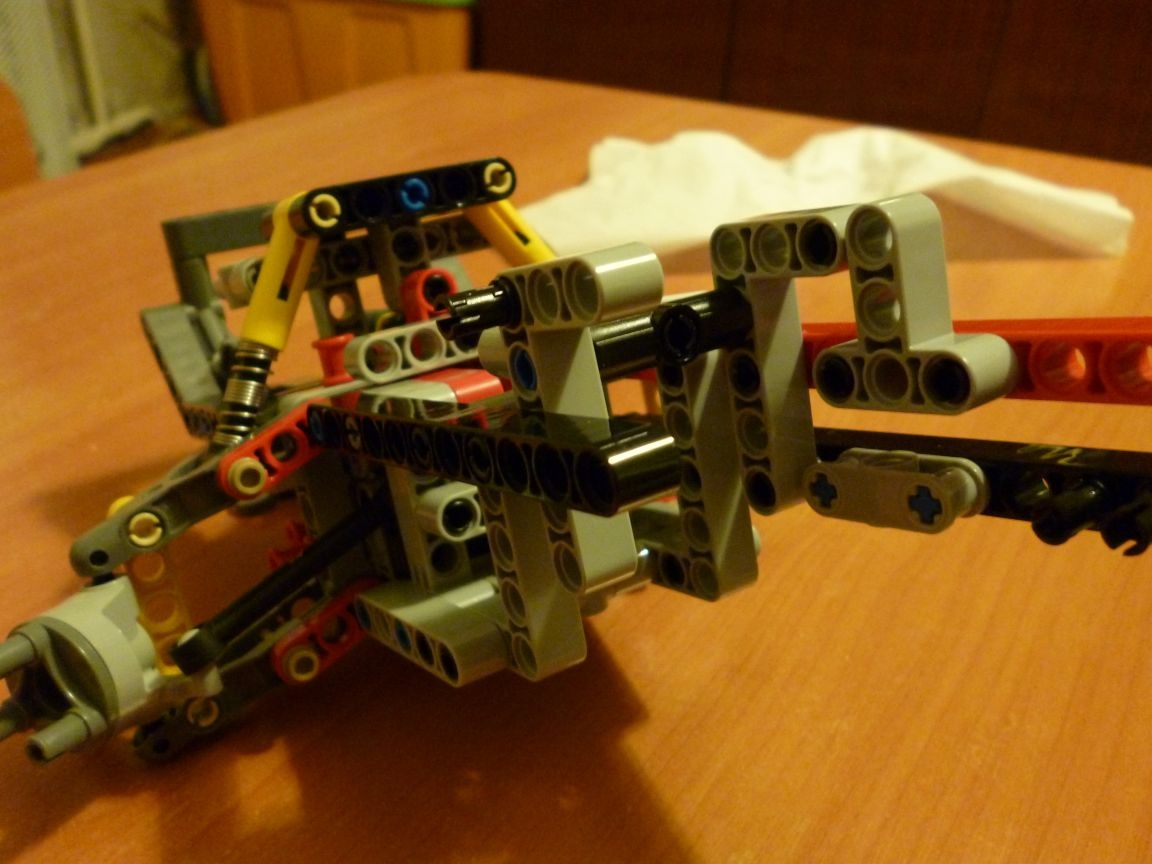

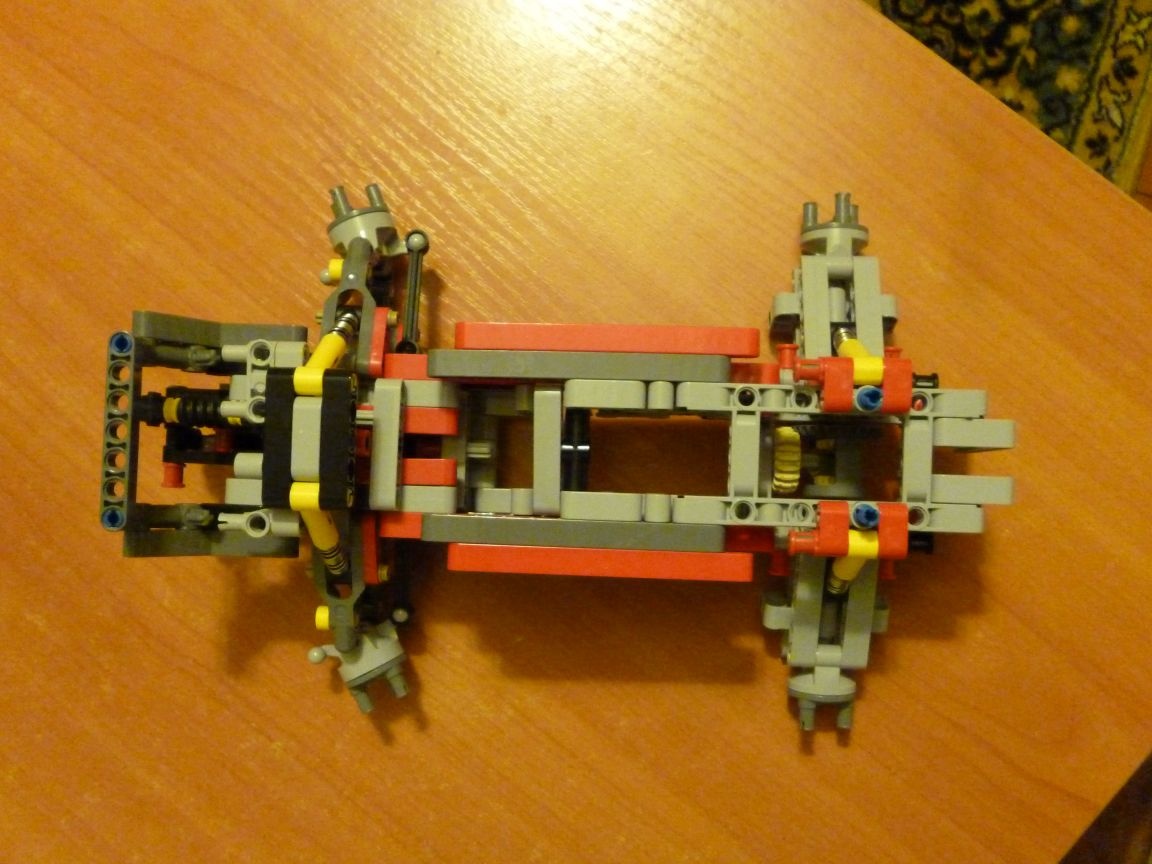
Vaihe 3 koota alusta.
Yhdistämme molemmat osat kuvan osoittamalla tavalla:

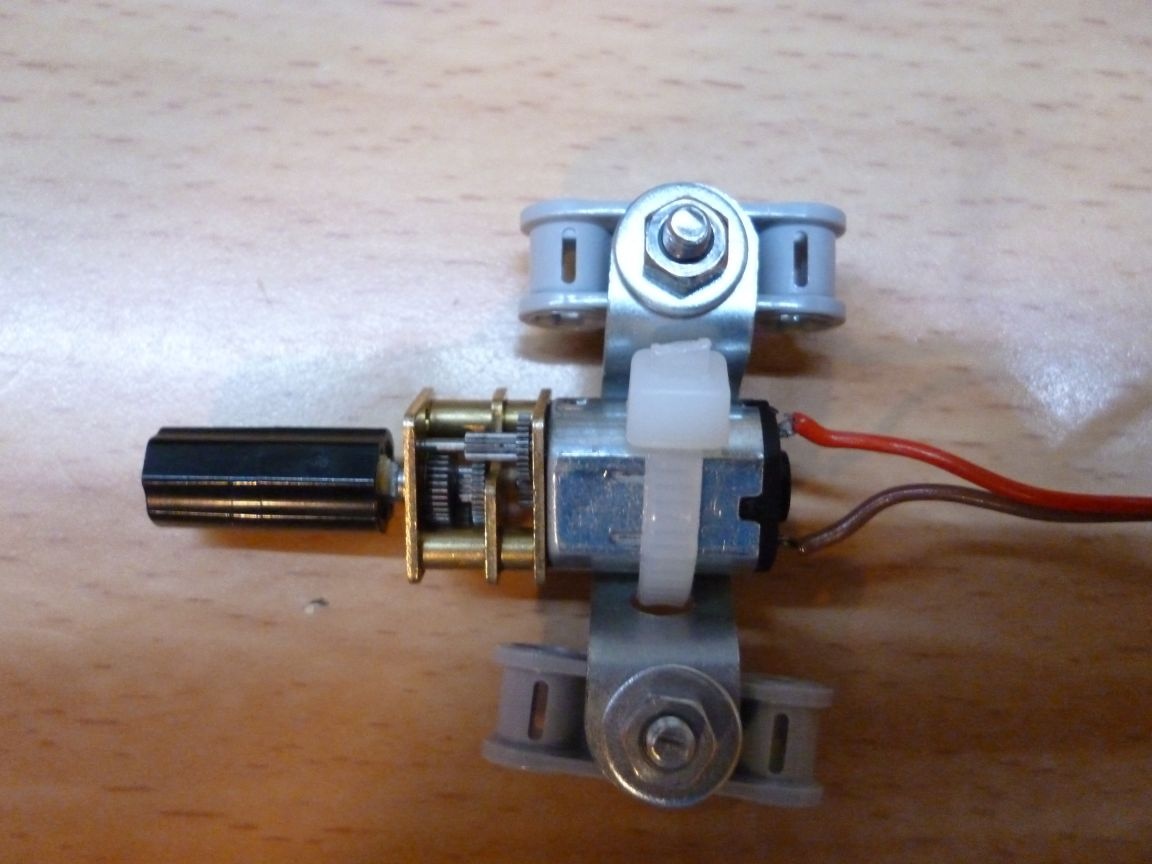
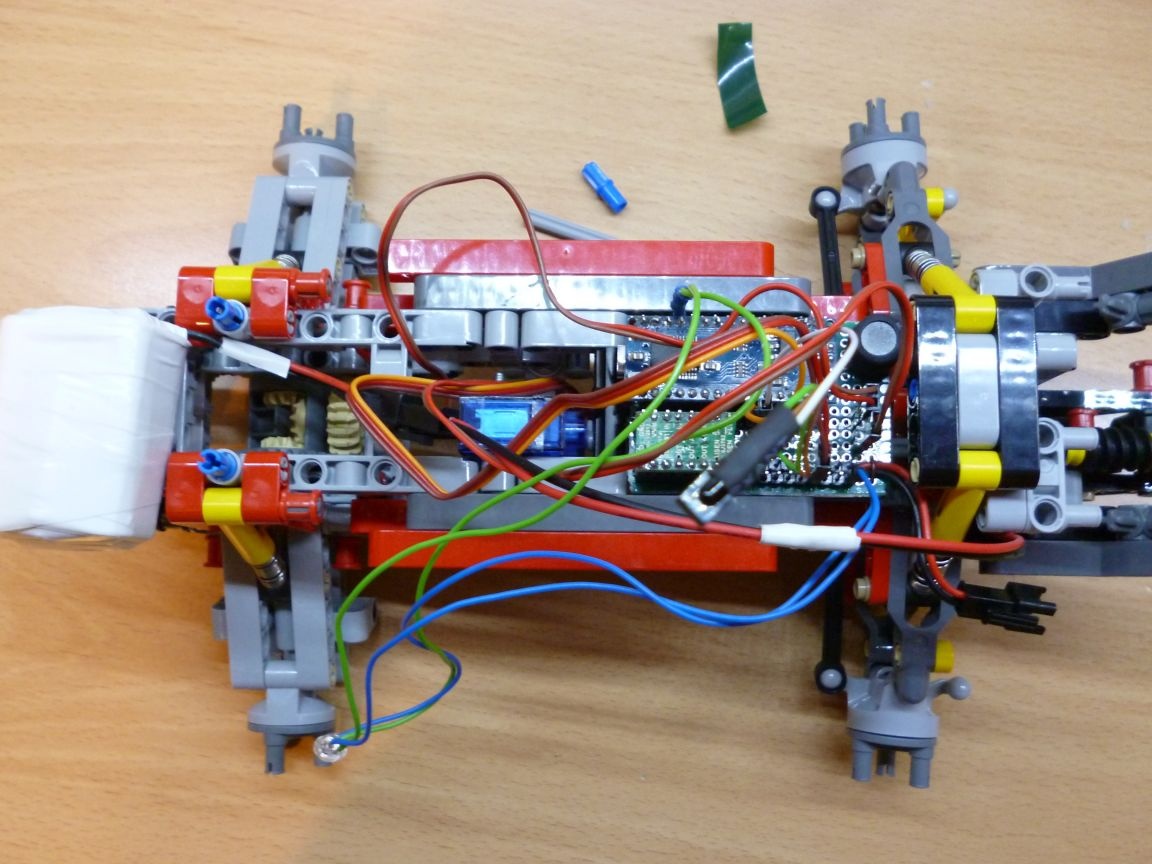
Ratkaisin vaihdemoottorin kytkemisen suunnittelijan osiin seuraavan ongelman: laita vaihdemoottorin akselille kytkentäholkki ja työnsi tulitikunromu kiinnitystä varten. Vaihdemoottorin asennukseen käytettiin rauta-suunnittelijan ja puristimen metallimuovia.
Kävi ilmi seuraavaa:
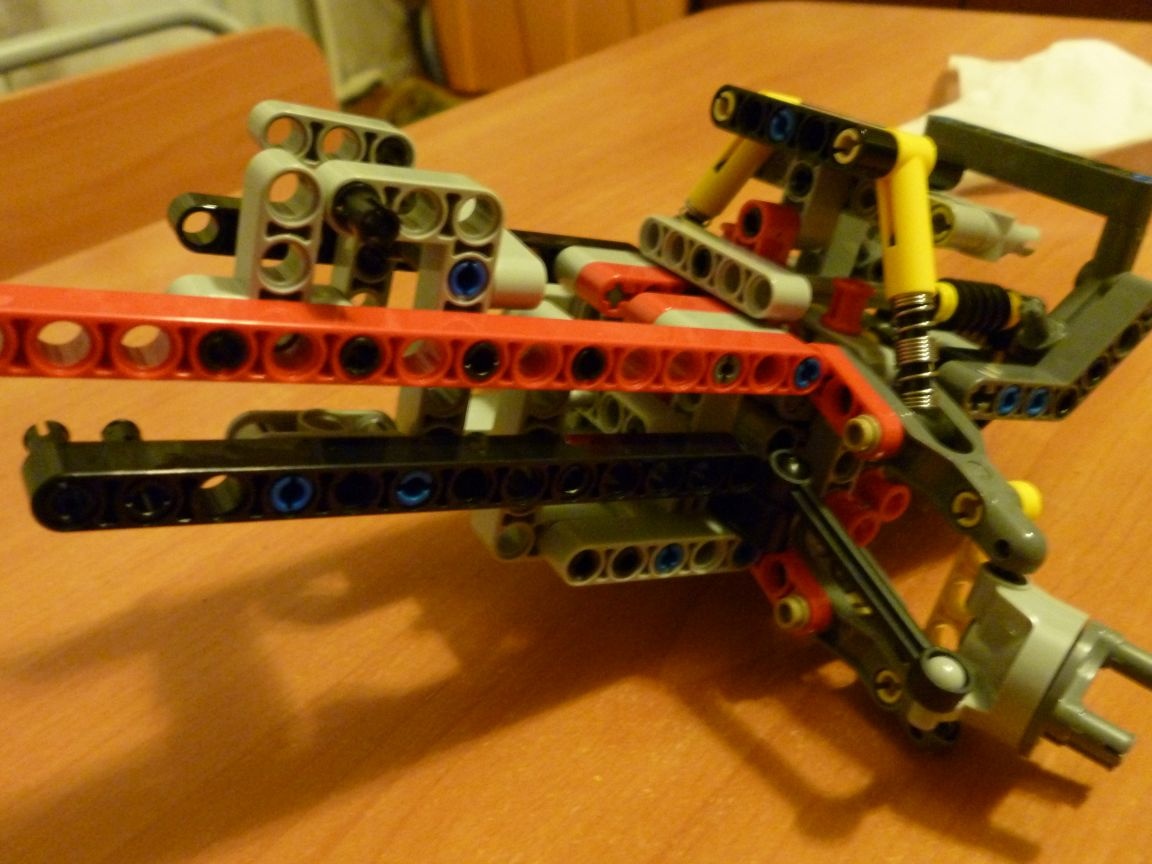
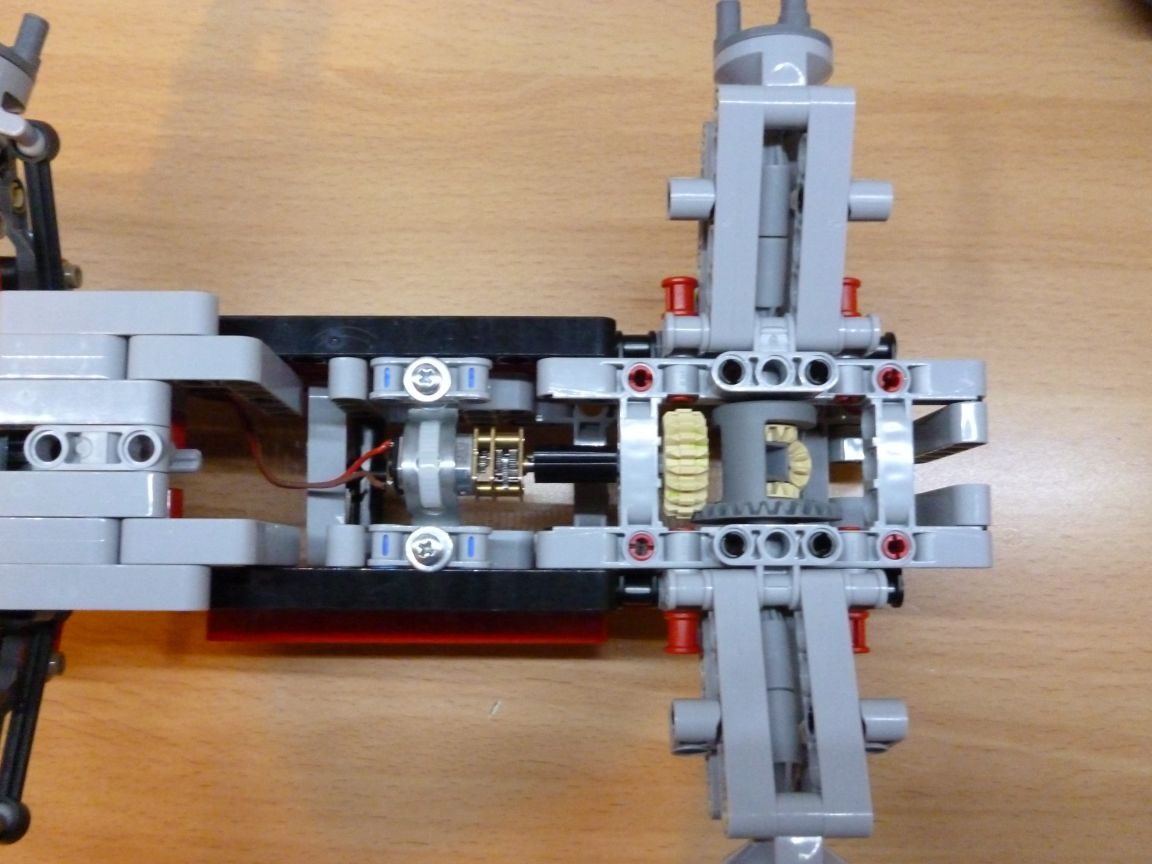
Kiinnitä alustaan:
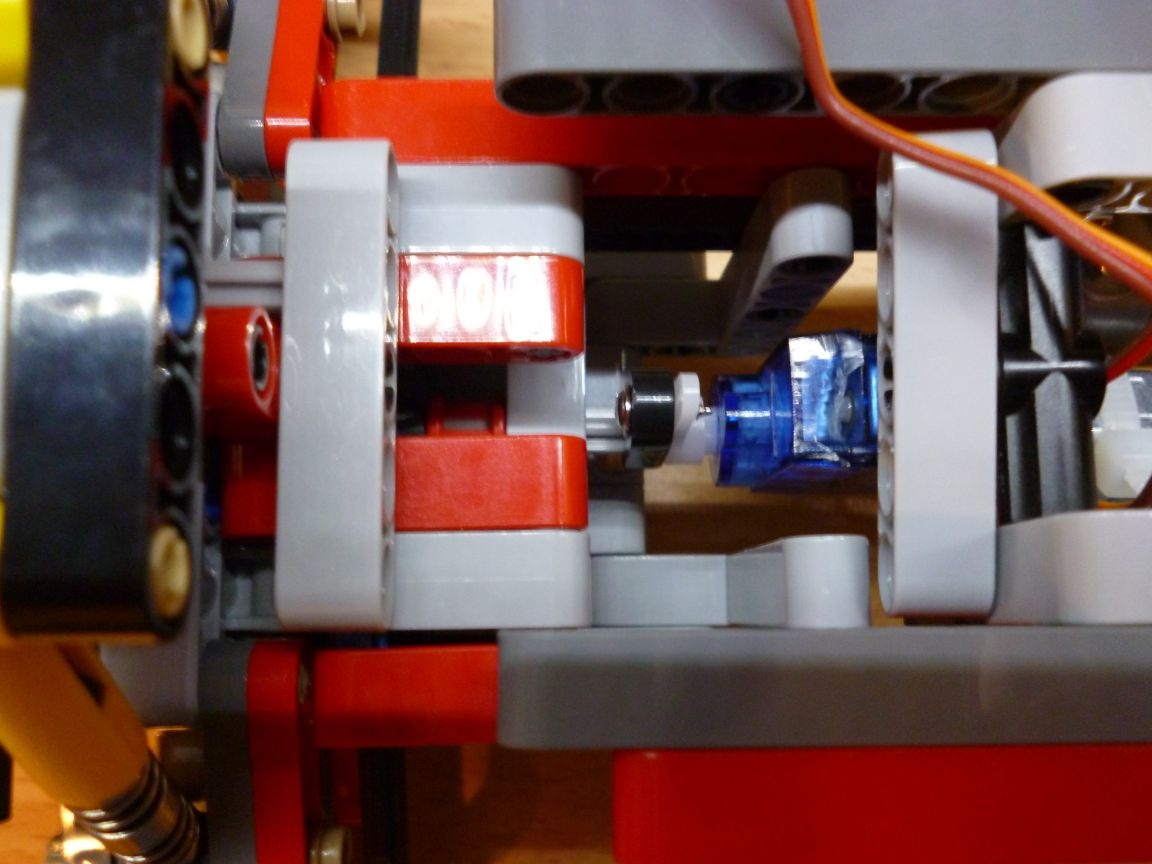
Kiertämisen suorittamiseksi otettiin servo SG-90. Poraaminen on välttämätöntä, jotta sisäosat eivät kosketa, läpimitaltaan reikä, jonka halkaisija on 3,2 mm tai leikattu vain paperitavaralla. Ja katkaise myös ulkonevat osat (“siipit” kiinnitystä varten). Asetamme pultin tehtyyn reikään ja kiinnitämme muttereilla. Servoakselille laitamme vivun ruuvilla ruuvilla osilla legoa:
set:
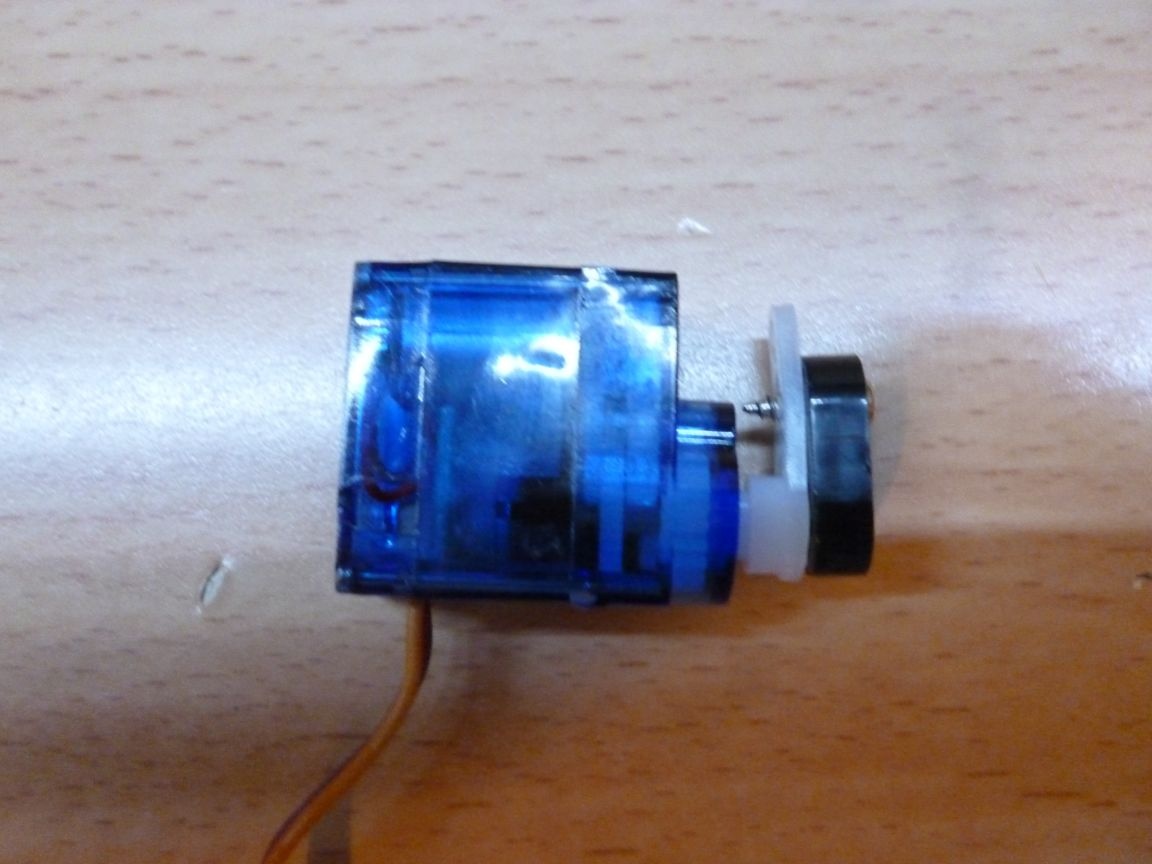
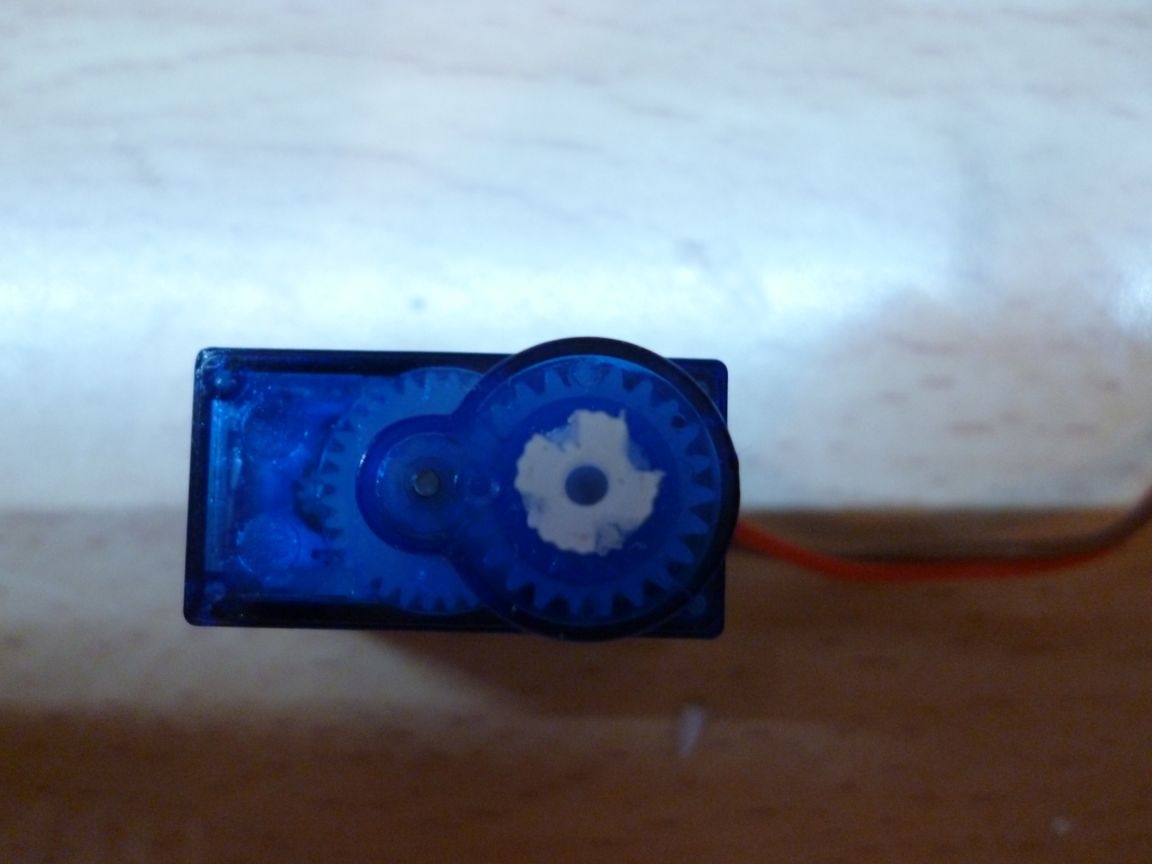
Käytämme toista servoa vinssiin. Teemme samalla tavalla kuin ensimmäisessä. Ja nyt se on nykyaikaistettava niin, että se pyörii vapaasti. Tätä varten purkaamme servoaseman, poistamme levyn ja juotostamme johdot suoraan moottoriin. Otamme pois päävarusteen ja katkaisemme sen matkapysähdykset.Ja lopuksi, teemme aukon paperiveitsellä päävarusteella kuten kuvassa:
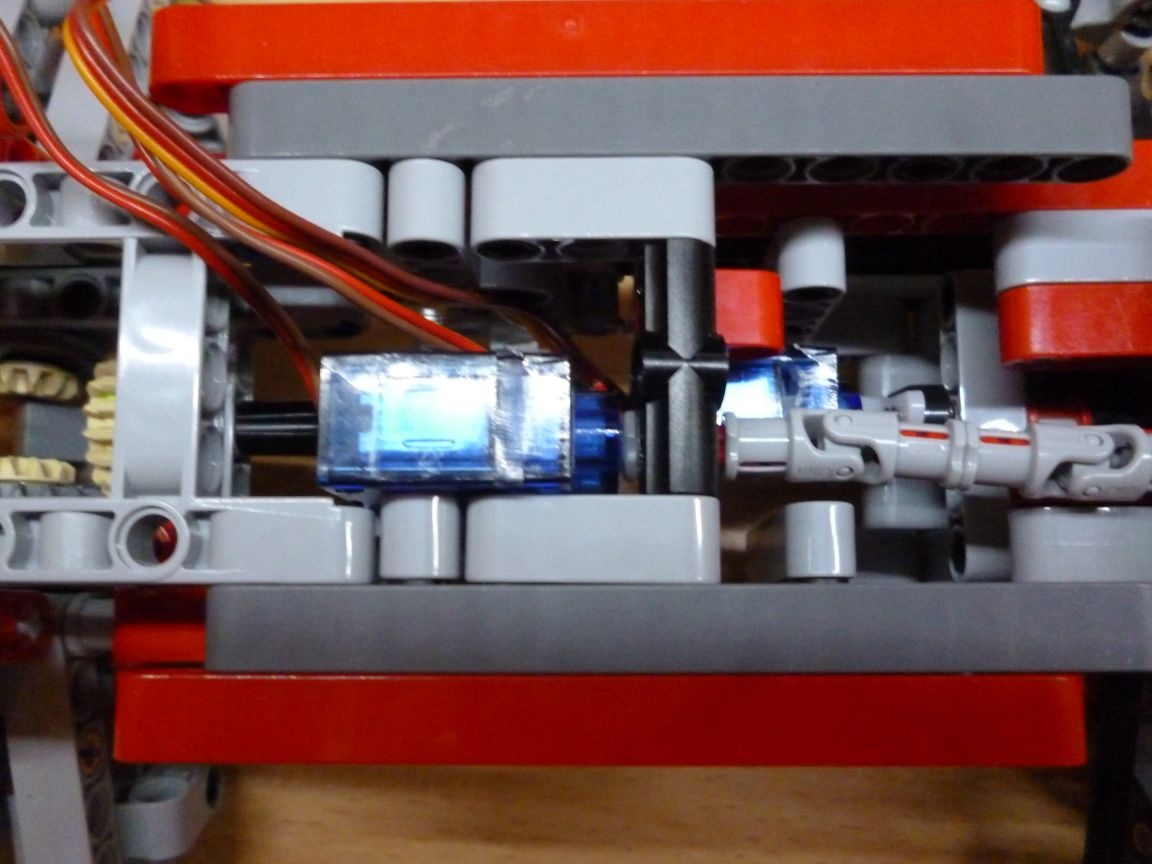
Yhdistämme vinssiin ja laitamme rungon:

Vaihe 4 Ohjaimen hallinta
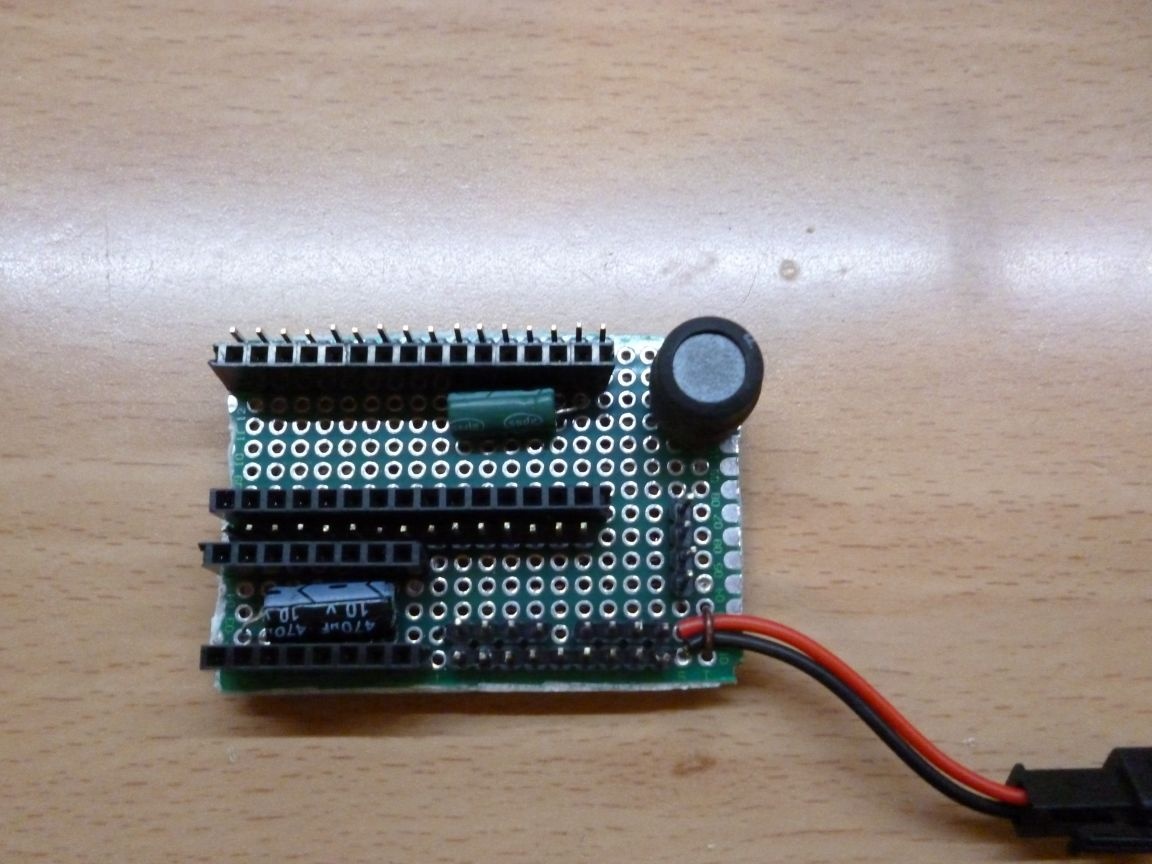
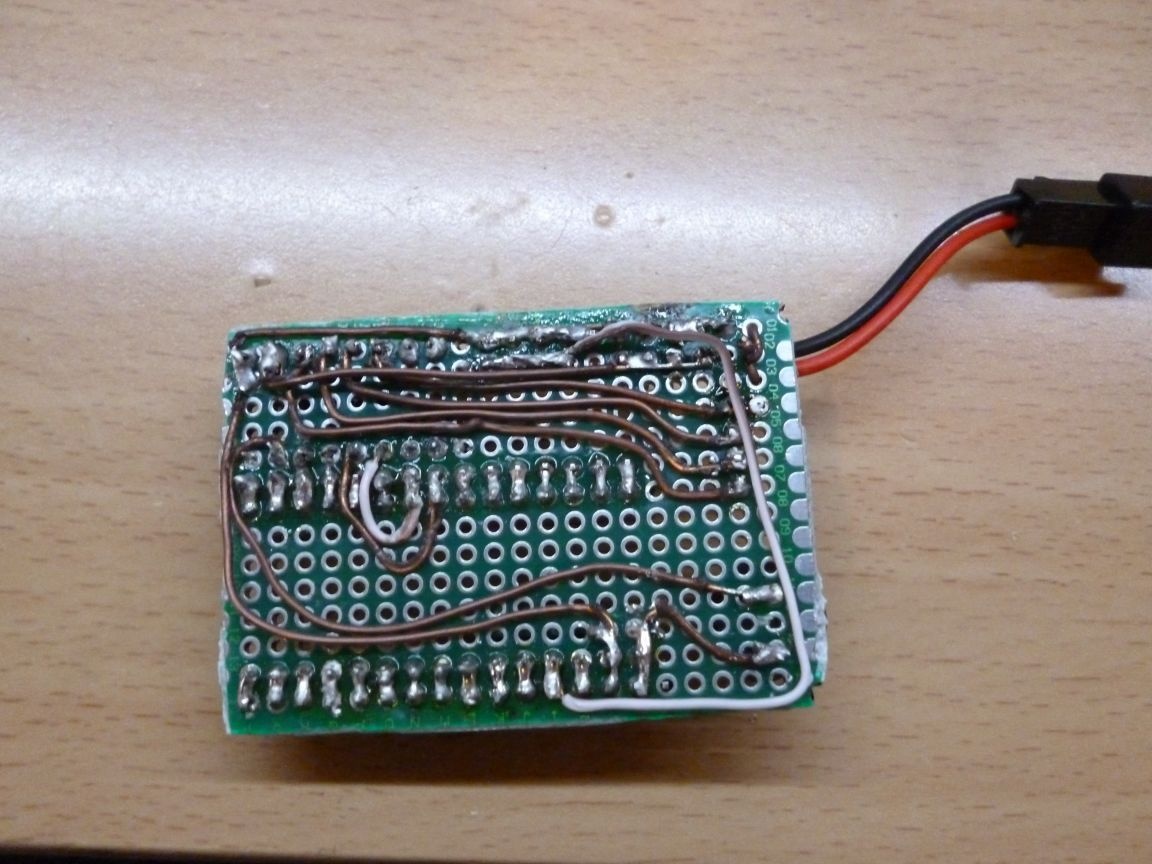
Ohjaamiseksi käytämme Arduinoa ja IR-vastaanotinta. Otamme juotin ja kootamme seuraavat piirilevylle:
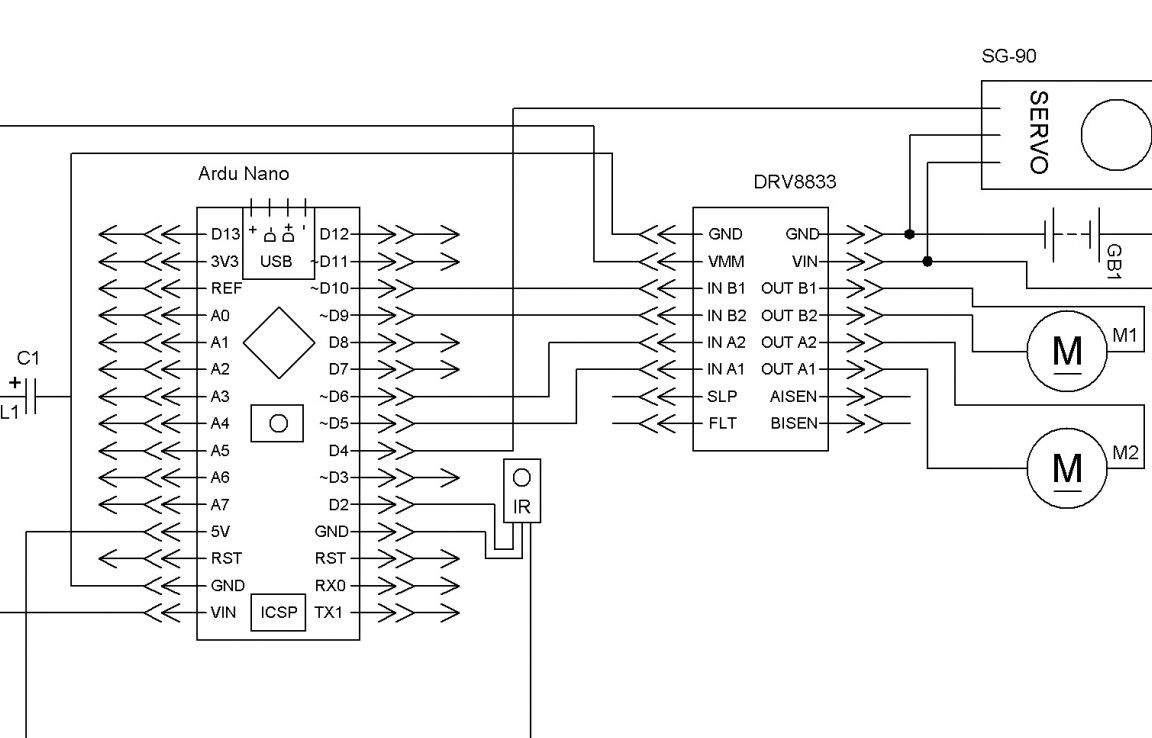
Selitän: mikä tahansa pienitehoinen kondensaattori, myös induktanssikäämi, sinun on vakautettava mikro-ohjaimen jännite. Vastukset valitaan käytetyille LEDille. IR-vastaanotin tai TSOP voidaan ottaa vanhasta lelusta tai ostaa radiokaupasta. Jos esiintyy voimakkaita häiriöitä, lisää kondensaattori infrapunavastaanottimen virtapiiriin.
Seurauksena on, että saamme:
Asennamme Arduino Nanon ja DRV 8833: n paikoilleen:
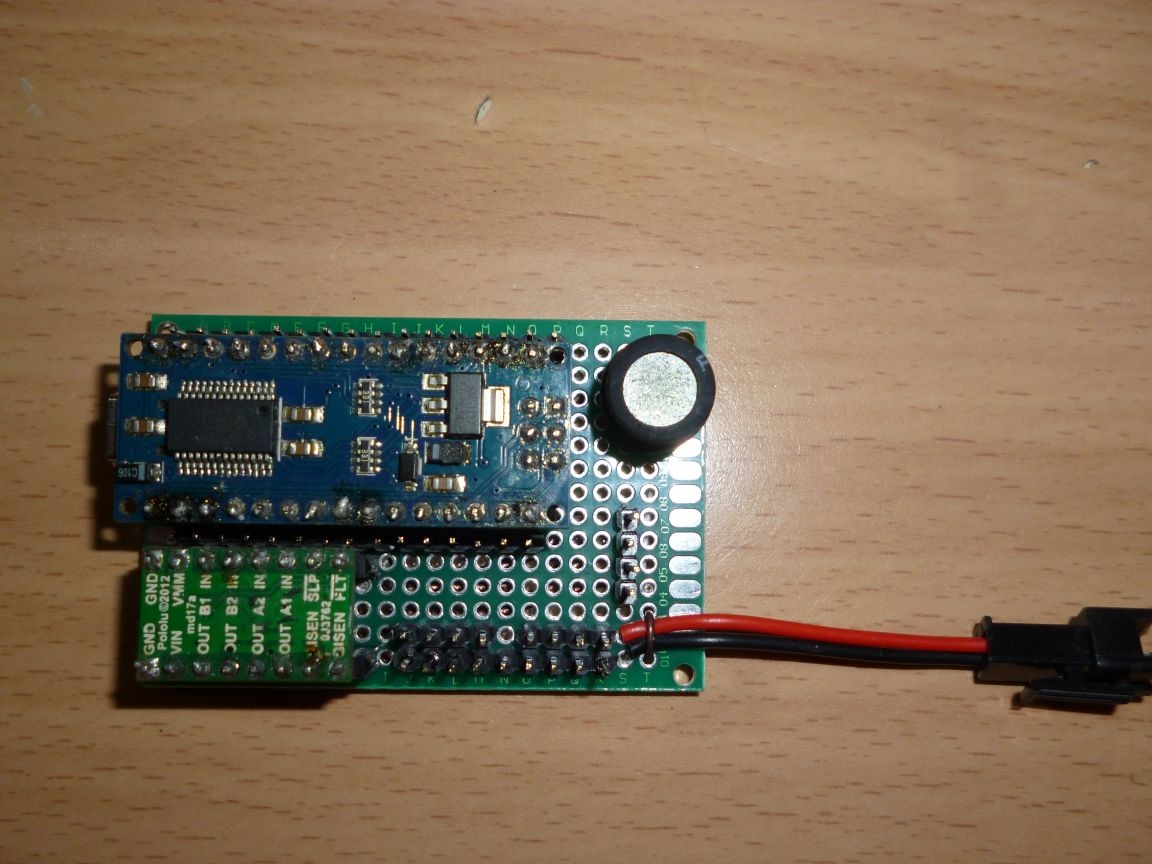
Ja laita levy alustalle:
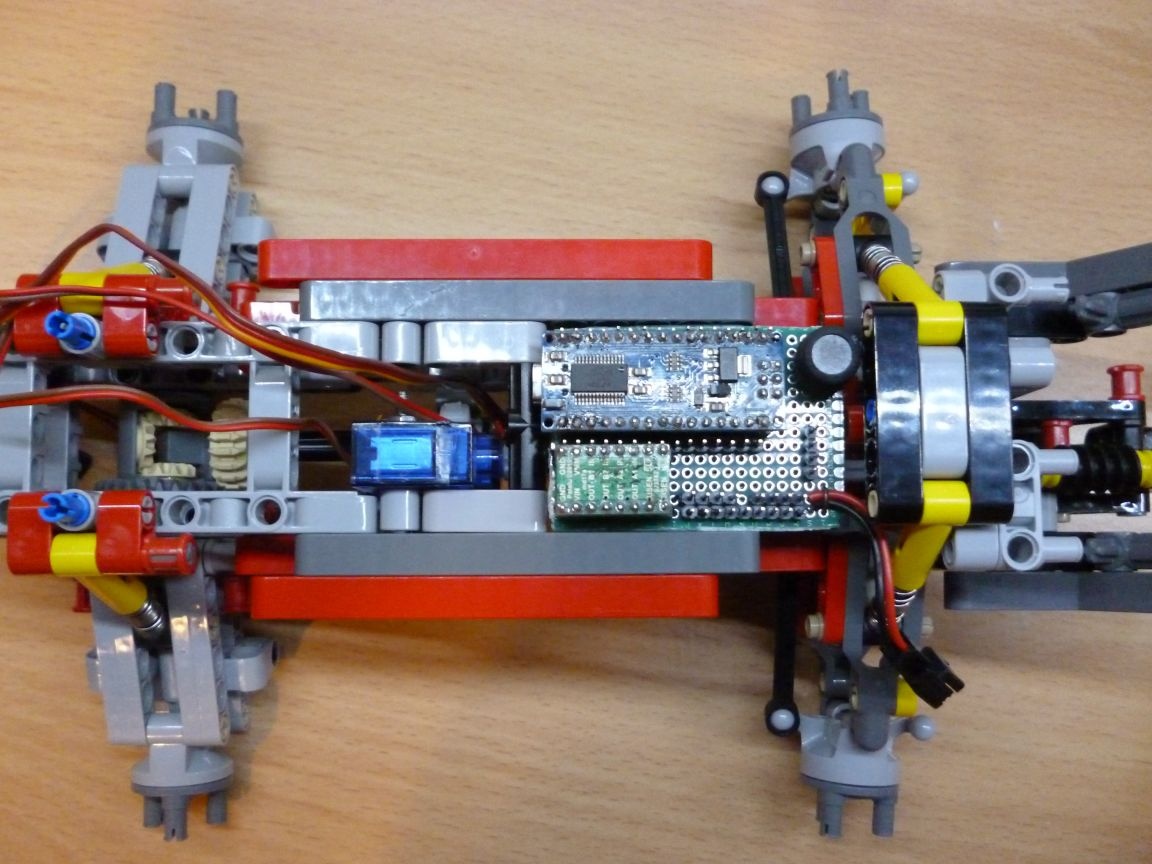
Virtalähde - 6 Ni-Mn 1.2v 1000mA -paristoa. On tarpeen juottaa ne sarjaan ja kelata ne sähköteipillä. Liimaa kaksipuoleisella teipillä rungon takana.
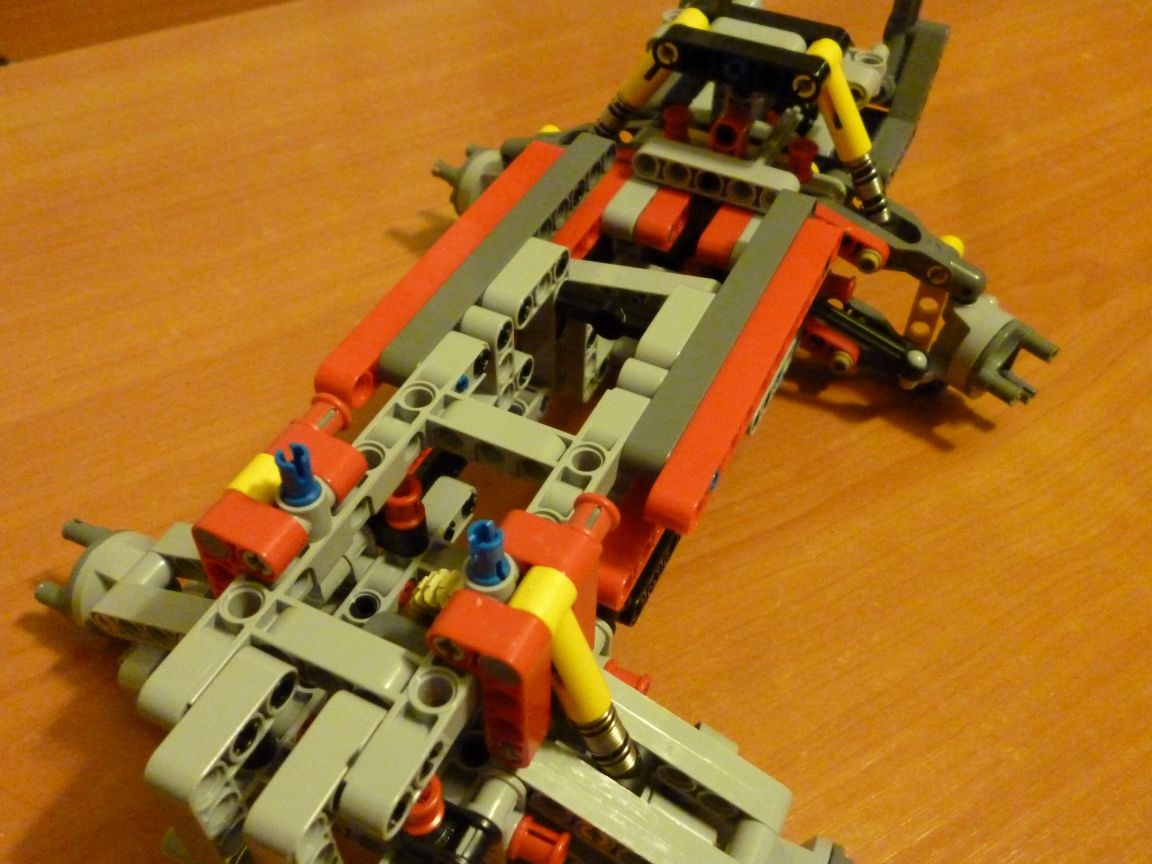
Yhdistämme koko rakenteemme:
Vaihe 5 Mökki
Mökki on henkilökohtaisesti improvisointini, ei ole valmiita ohjeita, joten sinun on kerättävä valokuvista.



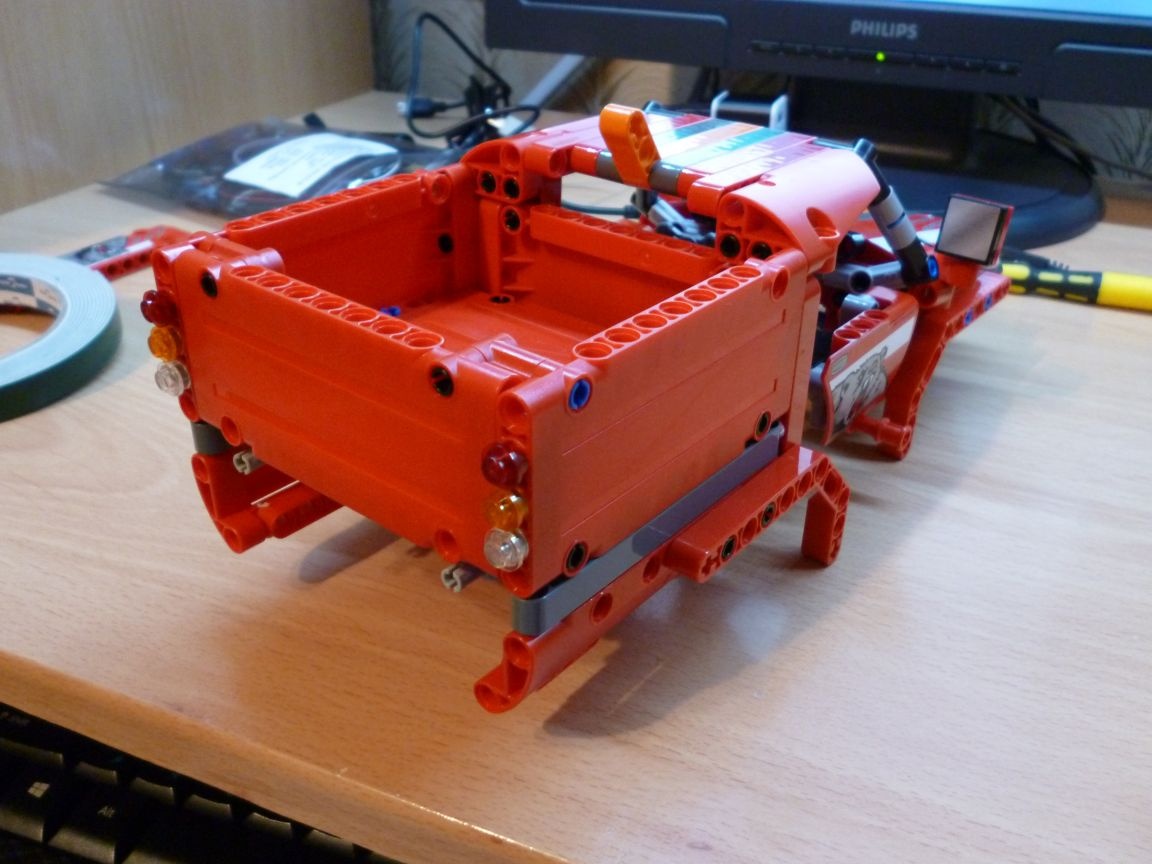
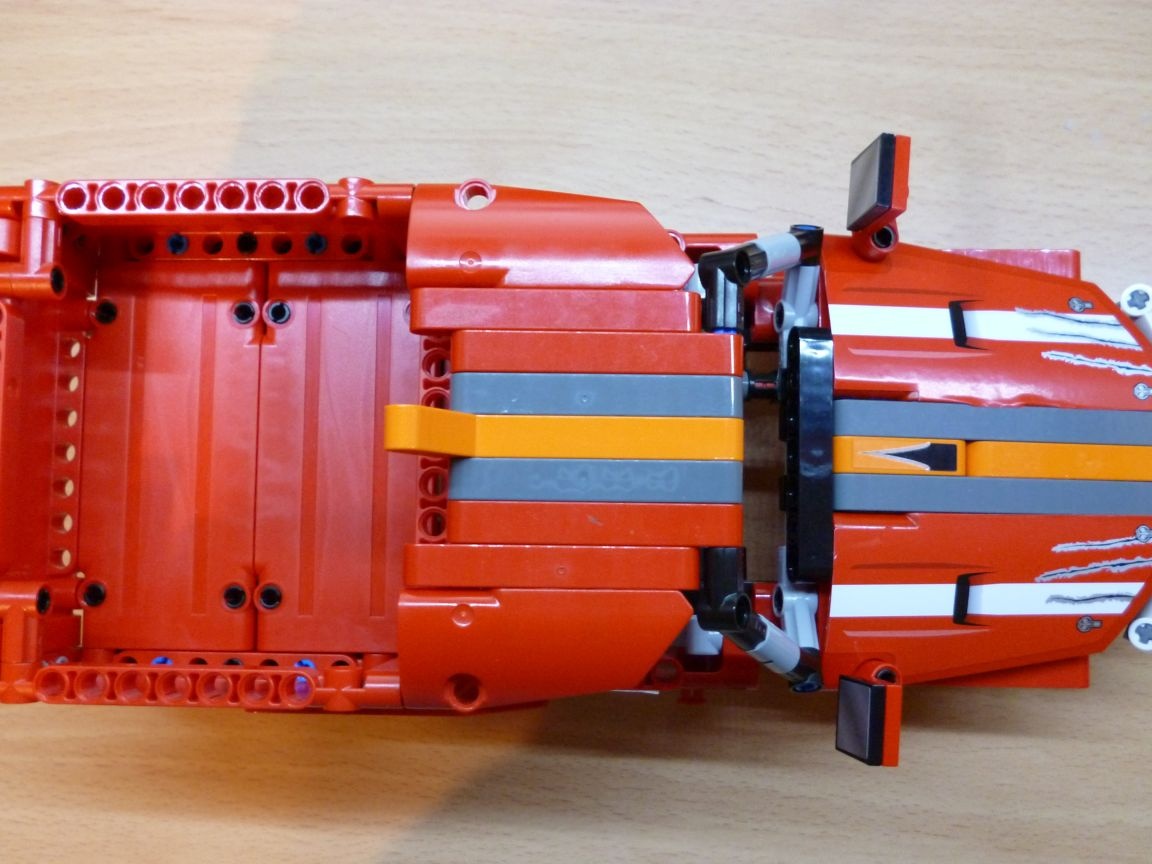
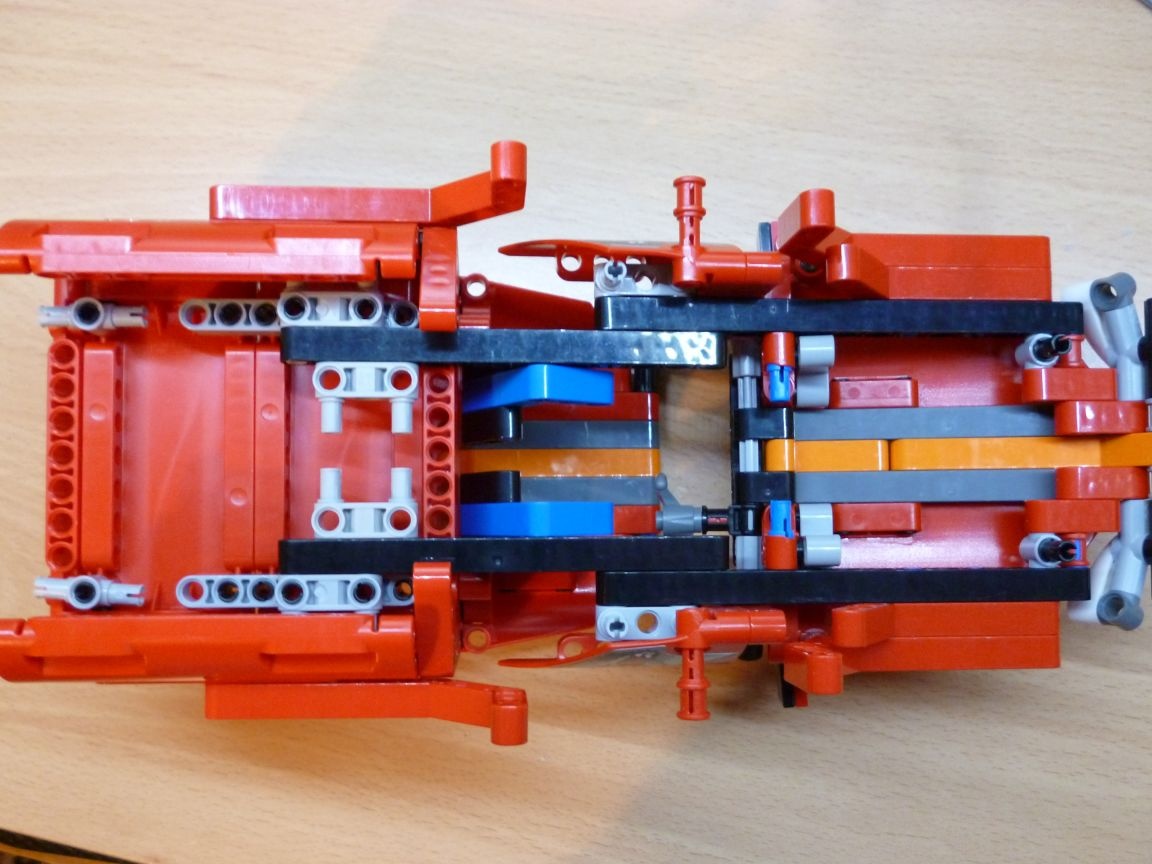
Voit koota oman version, sinun täytyy vain asentaa se rungon alle. Tärkeintä tässä on sovittaa kiinnitys alustaan. Niitä on neljä ja ne ovat selvästi näkyvissä valokuvassa ohjaamon pohjasta.
Vaihe 6 laiteohjelmisto.
Tänään, kuten aina, ohjelmoin kuitenkin Arduino IDE: ssä. Ensin sinun on täytettävä laiteohjelmistoni ja tarkastettava terminaalin kautta kaukosäätimen koodeja, joita aiot käyttää. Voit ottaa minkä tahansa infrapunakaukosäätimen, esimerkiksi televisiosta, DVD-soittimesta, tai koota oman (minulla on kotitekoinen kaukosäädin Sega-joystickillä). Kun painat painiketta, terminaalissa näemme painetun painikkeen koodin, kirjoita se paperille. Teemme tämän kaikilla painikkeilla, joilla haluamme ohjelmoida toiminnot. Muokkaa seuraavaksi luonnosta. Kirjoita muistiin koodimme tarvittavia toimia varten ja vilkkuu uudelleen. Tämä laiteohjelmisto on määritetty Sega-joystick-kaukosäätimessäni. Koneella pelaamisen aikana huomasin muutamia vivahteita tai haittoja. IR-komentojen luotettavaa vastaanottoa on vaikea saavuttaa liikkumisen aikana. Ja tapahtuu näin: paina nuolta eteenpäin, kone sai komennon mennä, ja ryntäsi eteenpäin, vapautti nuolen, mutta se ei saanut pysäytyskomentoa, ja jatkaa ajamista, kunnes se kaatuu tai jumittuu, se on täynnä vikoja. Osittain tämä ongelma voidaan ratkaista lisäämällä komennon lähetysten uusimismäärää, mutta tämä on mahdollista vain itse kaukosäädintä käytettäessä. Mutta valitsen kardinaalisemman ratkaisun - siirryn käyttämään 433MHz lähetin - vastaanotinta. Kirjoitan tästä seuraavassa artikkelissa.
Vaihe 7 laita pyörät.
Joten meidän on vain laitettava ohjaamo alustalle, asetettava pyörille ja tarkistettava maastoautomme toiminnassa.

