


Otin osan suunnittelustani Lego Technic 42049: n ja Lego Technic 42041: n kokoonpano-ohjeista. Loppu on improvisointini. Käytän valvonnassa android-laitteeseen tai tietokoneeseen liittyvää Bluetooth-moduulia. Joten tarvitsemme:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- L9110S moottoriohjain
- 1 servomoottori SG-90
- Bluetooth-moduuli HC-05 tai vastaava
- USB-UART arduino-laiteohjelmistoon
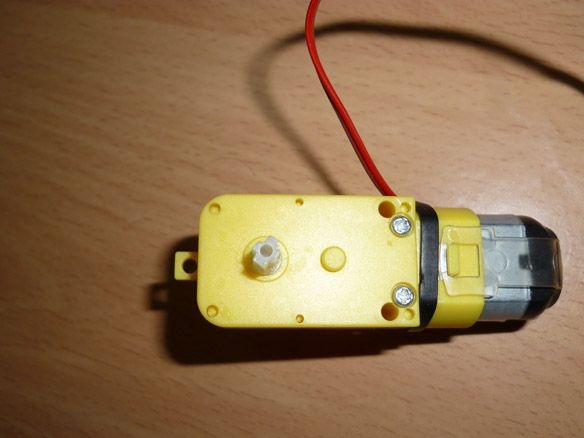
- Moottorin vaihdelaatikko 6v 1: 150 100 rpm
- 2 LEDiä
- 2 vastuksia 150 ohmia
- Kondensaattori 10v 1000uF
- 2 yhden rivin kampaa PLS-40
- Induktori 68mkGn
- 6 NI-Mn 1.2v 1000mA -paristoa
- Liitin isä-äiti kahden navan johdolla
- Homutik
- Eriväriset johdot
- juote
- Rosin
- juotosrauta
- Pultit 3x20, mutterit ja aluslevyt niille
- Pultit 3x40
- Pultit 3x60
Vaihe 1 Taka-akselin kokoonpano
Eteenpäin - taaksepäin tapahtuu vaihdemoottorilla, jolla on 6 V moottori, vaihde 1: 150 ja joutokäyntinopeus 100 rpm. Voit kokeilla toista välityssuhdetta, mutta tämä on mielestäni optimaalinen. Vaihdelaatikon akseli molemmilta puolilta on viistetty ristin muotoon ja asetettava lego-yksityiskohtiin:
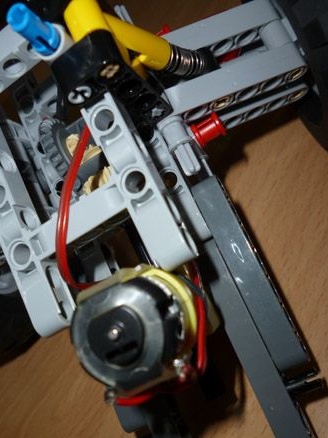
Seuraavaksi keräämme taka-akselin perustan Lego 42029 osan 1 ohjeiden mukaisesti, alkaen 3 sivusta 8: een. Ja lisää muutama yksityiskohta, jotta voit asentaa moottorin ja vaihdelaatikon.
Näytä online-tiedosto:
Näytä online-tiedosto:



Vaihe 2 Etuakselin kokoaminen
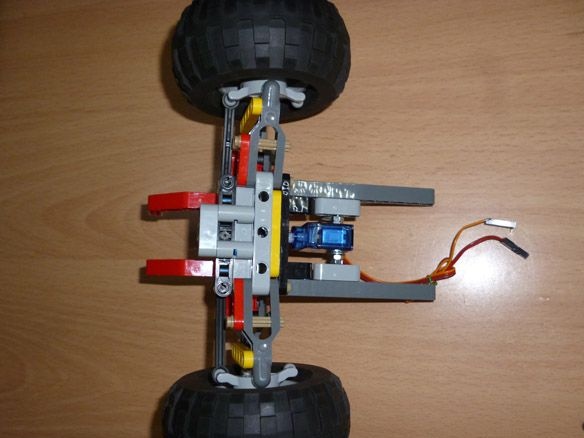
Asennamme jousituksen etuosan Lego 42029 osan 1 ohjeiden mukaan, sivuilta 21 - 23. Otamme trapetsoidun Legon toisesta osasta sivuilta 6-11. Servo SG-90 sopii hyvin pyörien kääntämiseen. Kiinnittääksesi se malliimme, on porattava huolellisesti, jotta servon sisäosia ei kosketa, läpimitaltaan reikä, jonka halkaisija on 3,2 mm, tai vain leikata se paperikaupalla. Ja katkaise myös ulkonevat osat (“siipit” kiinnitystä varten). Asetamme pultin tehtyyn reikään ja kiinnitämme muttereilla. Servoakselille laitamme vivun ruuvilla ruuvilla osilla legoa:





Vaihe 3 Jalustan ja ohjaamon kokoaminen
Yhdistämme molemmat sillat kuvan osoittamalla tavalla:
Kokoamme matkustamon Lego 42041: n ohjeiden mukaan. Ensimmäisen osan sivuilta 39-47. Edelleen toisen osan sivuilta 5–28. Sekä puskurin ohjeiden toisen osan sivuilla 38-43.
Näytä online-tiedosto:
Näytä online-tiedosto:


Näytä online-tiedosto:
Näytä online-tiedosto:
Vaihe 4 Sähkö
Hallinnointiin käytetään Arduino Pro Mini ja Bluetooth-moduulia. Pro Mini voidaan korvata millä tahansa muulla Arduino-levyllä. Valitsin Pro Mini -sarjan, joten se on pienin. Moottoriohjainta tarvitaan moottorin kytkemiseen.
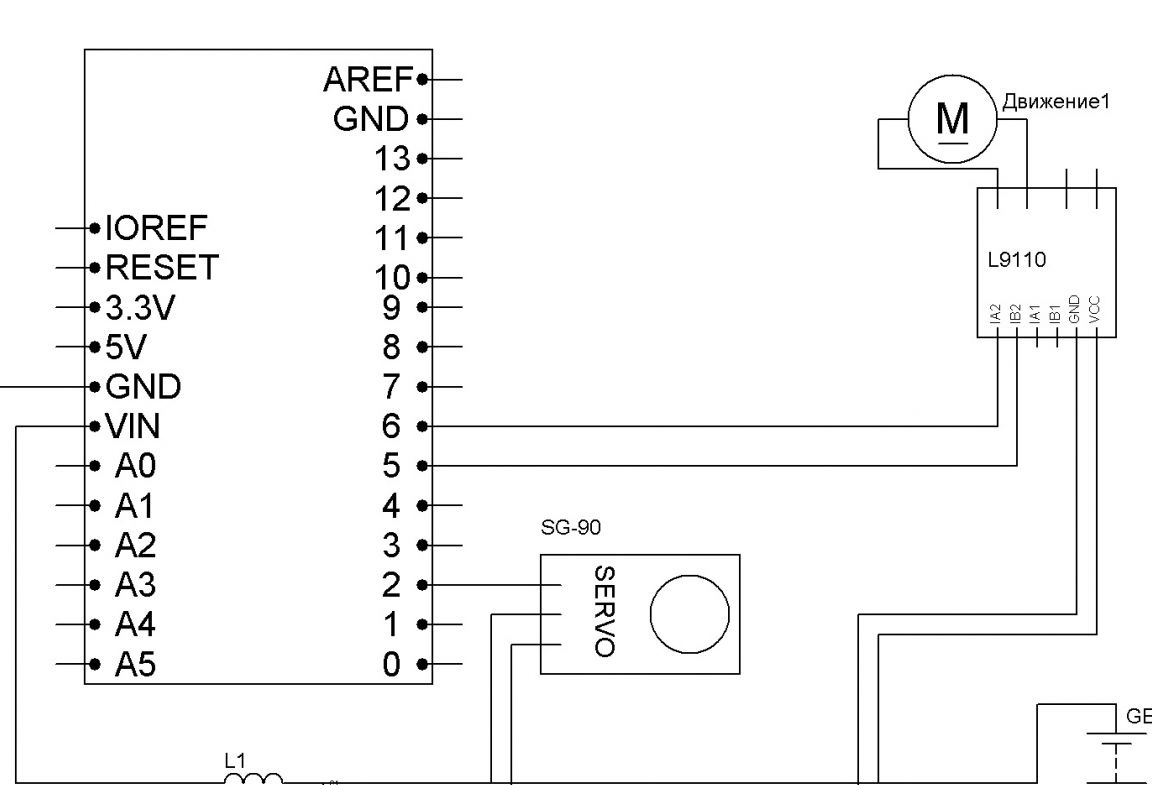
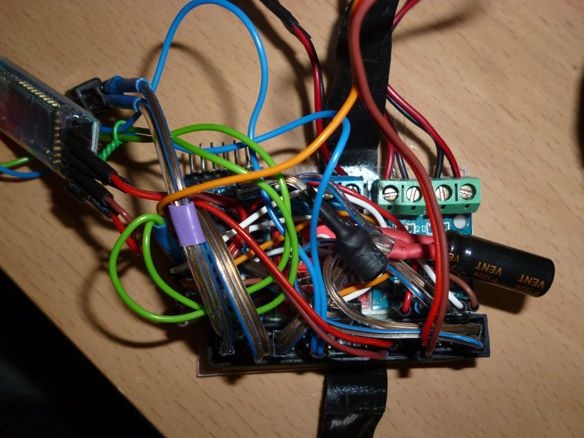
Kaikkien komponenttien kytkentä Dupont-äiti-äiti -johtoihin. Virta - 6 NI-Mn 1.2v 1000mA -paristoa kytkettynä sarjaan. Kaikkien pienitehoisten kondensaattorien, myös induktorin, joudut stabiloimaan mikro-ohjaimen teho. Kahden LEDin anodit on kytketty 4-napaiseen arduinoon, katodit GND: hen. Vastukset valitaan käytetyille LEDille. Mukavuussyistä kela paristot teipillä.

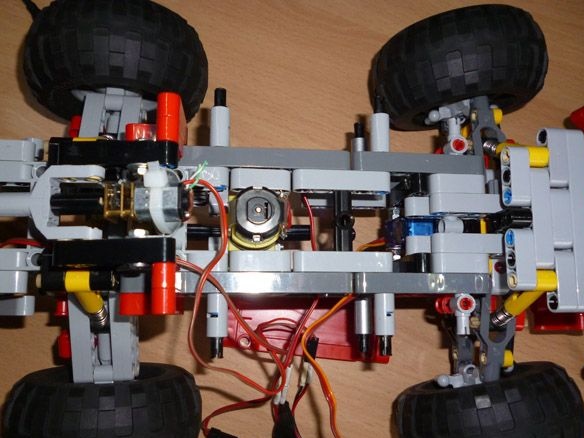
Liimaamme kaiken kaksipuoliselle teipille seuraavien perusteiden perusteella:
Asetamme sähköasentajamme pyörien väliin ja suljemme:
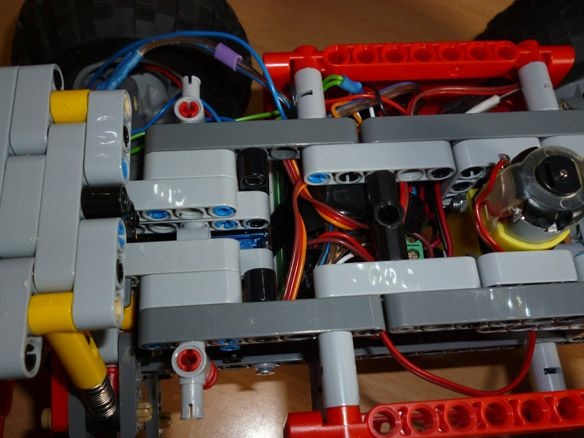
Lisää pari iskua:


Vaihe 5 Bluetooth-asennus
Halvimmat Bluetooth-moduulit ovat nykyään HC-05 ja HC-06. Niitä on runsaasti kiinalaisissa verkkokaupoissa. Erot niiden välillä ovat siinä, että ensimmäinen voi toimia sekä isäntätilassa (orja) että orjatilassa (isäntä). Toinen on puhtaasti orjalaite. Toisin sanoen, HC-06 ei pysty havaitsemaan pariksi muodostettua laitetta ja muodostamaan yhteyttä siihen, se voi vain totella isäntää.
Moduulien lyhyet ominaisuudet:
- Bluetooth-siru - BC417143, valmistaja
- viestintäprotokolla - Bluetooth Specification v2.0 + EDR;
- toiminnan säde - jopa 10 metriä (tehotaso 2);
- Yhteensopiva kaikkien Bluetooth-sovittimien kanssa, jotka tukevat SPP: tä;
- Flash-muistin määrä (laiteohjelmiston ja asetusten tallentamiseksi) - 8 Mbit;
- radiosignaalin taajuus - 2,40 .. 2,48 GHz;
- isäntärajapinta - USB 1.1 / 2.0 tai UART;
- virrankulutus - virta tiedonsiirron aikana on 30–40 mA. Keskimääräinen nykyarvo on noin 25 mA. Kun yhteys on muodostettu, kulutettu virta on 8 mA. Lepotilaa ei ole.
Yleensä moduulit myydään kahtena yhdessä juotettuna levynä. Pienempi on tehdasmoduuli, jota käytetään laajasti erilaisissa elektroninen laitteissa. Suuri - erityinen leipälauta DIY: lle.
Näyttää siltä, miten moduulit HC-05 ja HC-06 DIY:
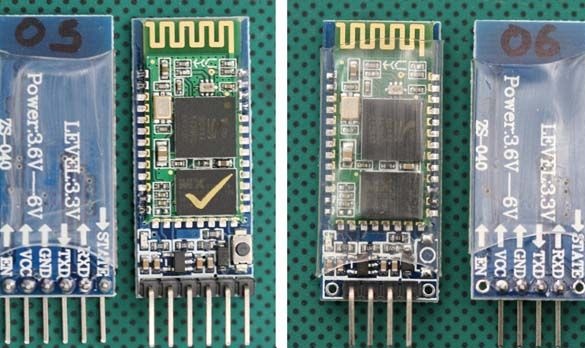
Periaatteessa voit käyttää mitä tahansa moduulia, jonka haluat. Moduuli ilman leipätaulua maksaa vähemmän, mutta silloin joudut huolehtimaan moduulin 3,3 V: n virtalähteestä ja pilaamaan itseäsi juottamalla johdot moduuliin. Valitsin mielestäni optimaalisen hinta-funktion suhteessa HC-06.
Yhdistämme seuraavasti:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5 V - VCC
GND –GND
Moduuli on konfiguroitava oikean toiminnan varmistamiseksi. Konfiguroimme pääteikkunaan syötetyt AT-komennot. Annan esimerkin HC-05-moduulin asettamisesta. Jos sinulla on eri asetus, se voi olla erilainen. Jotta moduulimme voi vastaanottaa komentoja, salamaamme ensin Arduinon seuraavalla laiteohjelmistolla:
Tässä tapauksessa Arduino toimii sillana tietokoneiden ja moduulin välillä. Laitteisto-ohjelmassa käytän SoftwareSerial-kirjastoa. Suurilla nopeuksilla se toimii epävakaasti. Jos haluat suuren nopeuden, voit kytkeä moduulin suoraan Arduino RX- ja TX-yhteystietoihin ja kirjoittaa laiteohjelmiston uudelleen. Mutta minun tapauksessamme työskentelemme moduulin kanssa nopeudella 9600. Joten laiteohjelmiston jälkeen avaa pääte ja kirjoita:
”AT” (ilman lainausmerkkejä) vastauksen “OK” pitäisi tulla (se tarkoittaa, että kaikki on kytketty oikein ja moduuli toimii)
”AT + BAUD96000” (ilman lainausmerkkejä) vastauksen “OK9600” pitäisi tulla.
Jos sinulla on oikea vastaus, siirry seuraavaan vaiheeseen.
Vaihe 7 Laiteohjelmisto
Käytä Arduino IDE -laitetta itse ja itse laiteohjelmiston kirjoittamiseen. Tämän päivän nykyinen versio on 1.8. Oikeastaan laiteohjelmisto:
Vaihe 8 Asenna puhelin.
Android-puhelimeen on asennettava ohjelma robotin ohjaamiseksi Bluetoothin kautta. Niitä on paljon. Voit kirjoittaa ”Bluetooth Arduino” Google Play -sovellukseen ja valita makusi mukaan. Pidin BT-ohjaimesta. Lataa ja asenna Android-puhelimeesi tai -tablettiisi. Seuraavaksi sinun on luotava yhteys moduuliin Android-asetusten kautta. Yhteyden salasana on “1234” tai “0000”. Määritä seuraavaksi ohjelma sopiville komennoille. Luettelo on alla.
Vaihe 9 Tietokoneen asennus (tarvittaessa)
Voit käyttää tietokonetta tai kannettavaa tietokonetta tarvittaessa tai vain mukavuuden vuoksi. Tätä varten tietokoneella on oltava Bluetooth. Muodostamme viestinnän moduulin kanssa tietokoneen hallintalaitteiden avulla. Seuraavaksi tarvitsemme päätteen komentojen lähettämiseen. Mikä tahansa sinulle sopiva.Kun laiteohjelmisto on tallennettu, ohjaus suoritetaan seuraavilla painikkeilla (komennoilla):
W - eteenpäin
S - takaisin
A - vasen
D - oikeassa
F - pysäkki
G - ohjauspyörä
K - ajovalot
L - ajovalo pois päältä
Komentojen syöttäminen jatkuvasti on hankalaa, joten suosittelen komentojen lähettämistä ohjelman avulla. Käytän Z-ohjainta. Valitse ohjelmassa portti (portti, jonka kautta yhteys muodostetaan) ja määritä komentojen näppäimet. Aseta tyhjäkäynti ja intuitiivinen.
