
Ostin pojalleni hienon lelun Ali: ltä - kaivinkone radiosta.
Se osoittautui vakavaksi virheeksi, joka ilmaistaan puominrajoittimien puuttuessa. eli Jos nostat nuolen maksimiin, niin se alkaa murtua, sama koskee tornin pyörimistä akselin ympäri (670 astetta). Tämän seurauksena on usein halkeama jopa pienellä kuormalla. Akselin ympäri se pyörii yleensä yhteen suuntaan suurilla vaikeuksilla. Purain tämän laitteen ja sain ajatuksen päivittää sitä.
1. Vaihda rungon moottorit toisilla, voimakkaammilla (vaikka tämä on nyt kyseessä). Ja säädä nopeutta. Nopeus on nyt yksi, vakio - eteenpäin tai taaksepäin.
2. Aseta puomin liikkeenrajoitimet, jotka saavuttavat puomin enimmäisnopeuden ja pysähtyvät, vain vastakkaiseen suuntaan.
3. Vaihda puomin moottorit askelmoottoreilla tai servoilla. Täällä todella tarvitaan ihmisten ymmärtämisen apua. Kumpi on parempi tälle roolille? Ja sopiiko se ollenkaan? Haluaisin kaivinkoneen selviytyvän tehtävistä tuntea olevansa hieman monimutkaisempi kuin irrotetun hiekan lataaminen, vaikka tämä on nyt hänelle vaikeaa - vaihteet halkeilevat ...
4. Akku on tehokkaampi ja suurempi asennettavaksi. Siellä on vastapainon terästankoja. Voit vain täyttää tilan. Kokeiluille on paljon tilaa :)
5. Haluan siis korvata itse kaivinkoneessa olevan levyn arduinolla ja lisätä WiFi-moduulin laitteen ohjaamiseksi. Kaukosäätimen on myös tehtävä toinen. Tässä kysymys on. Mikä arduinka ottaa? kumpi selviytyy? Nano, vai mitä? Tarvitaan 6 moottorin kytkeminen arduinoon (runko 2, torniin ja 3 puomiin). Tarvitseeko todennäköisesti jännitteenvakaaja?
Mitä voitte yleensä neuvoa tämän idean toteuttamisessa? Jos uskot, että tehtävä ei ole toteutettavissa, selitä mistä syystä kiitos. Haluan todella tehdä poikani kanssa, vaikka hän olisi tottunut oppimaan uusia asioita, enkä oppimista ... :)
Fotochki.
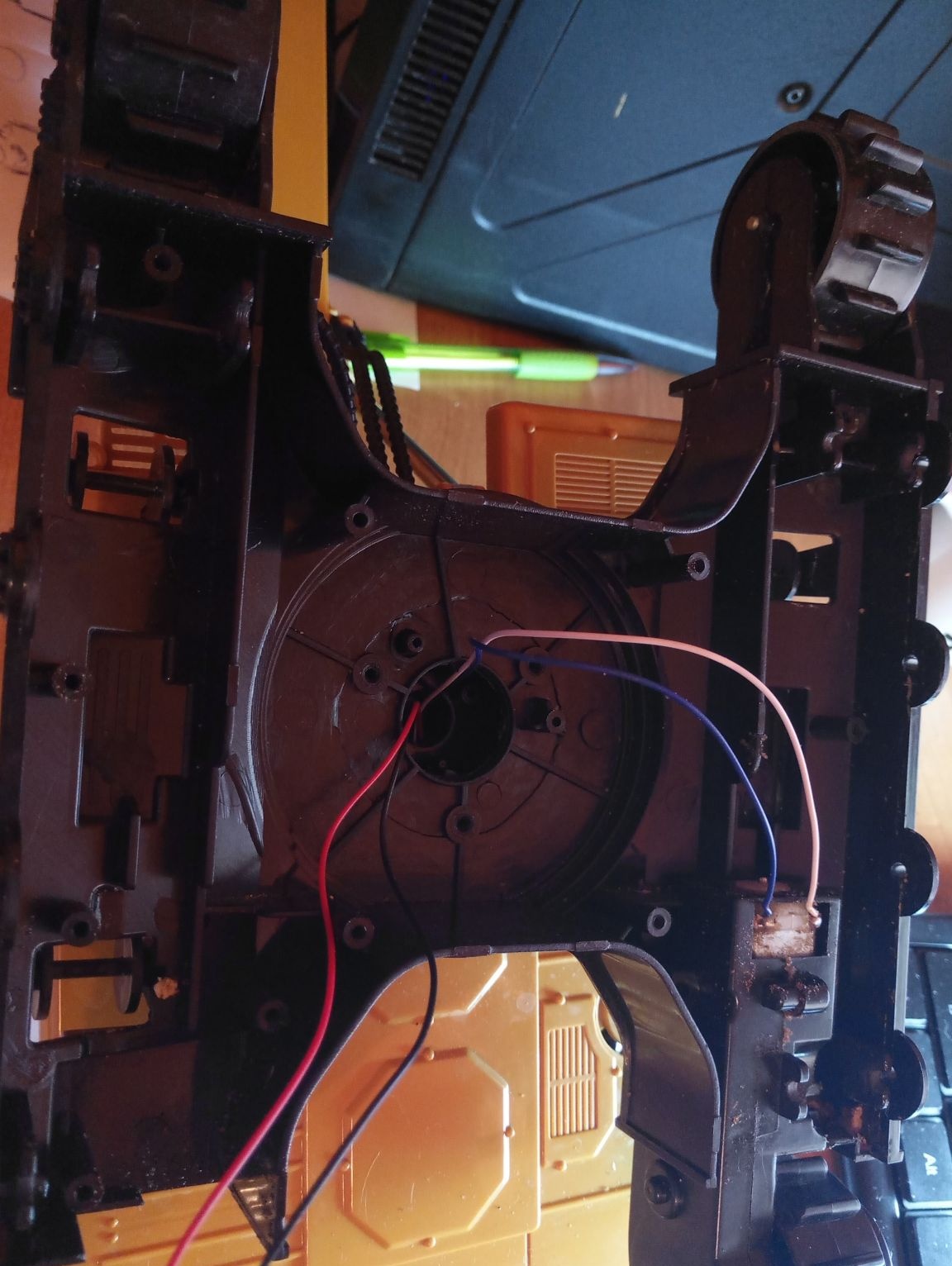
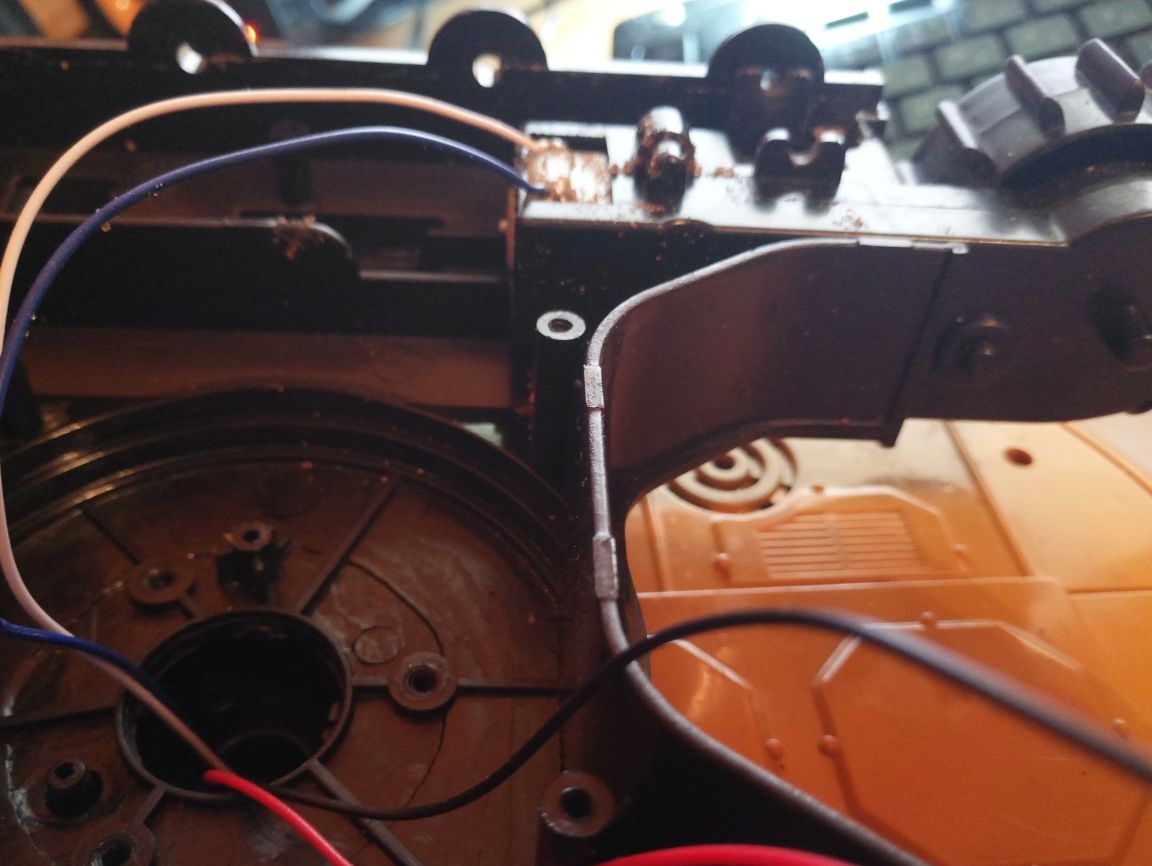
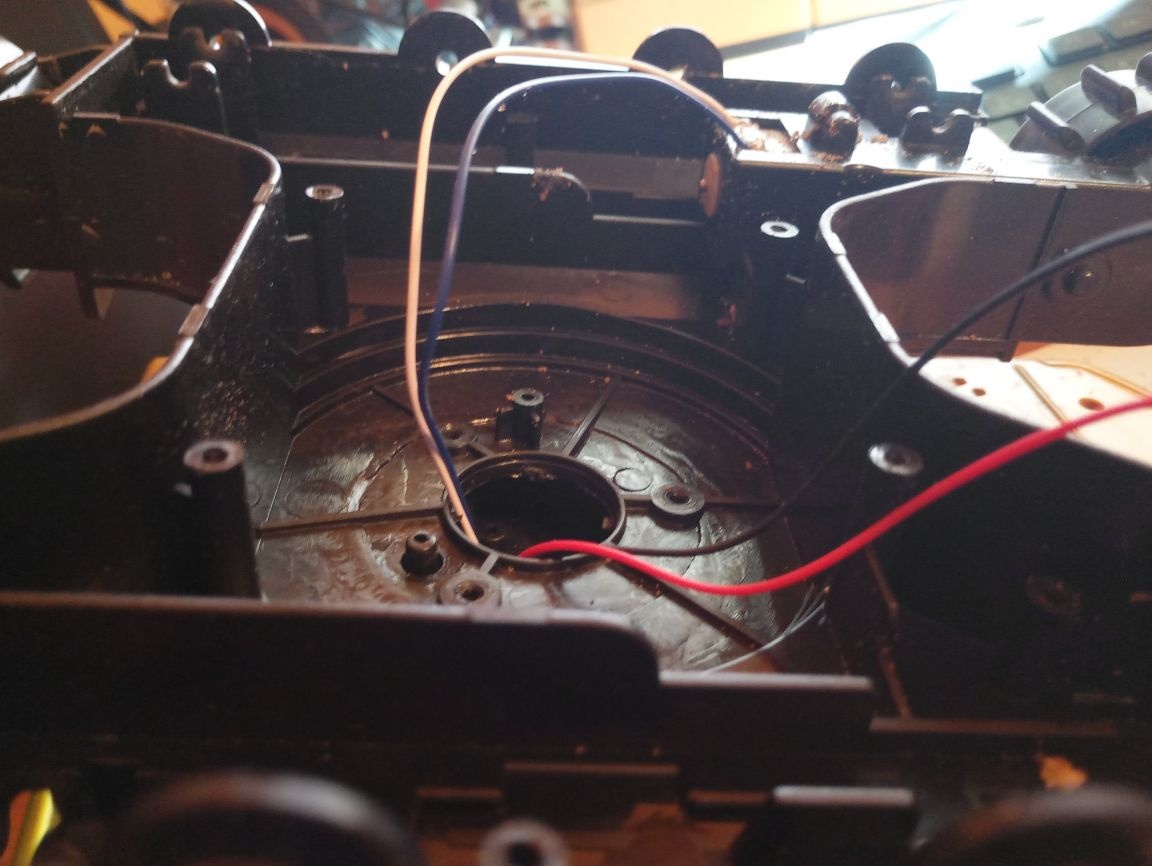
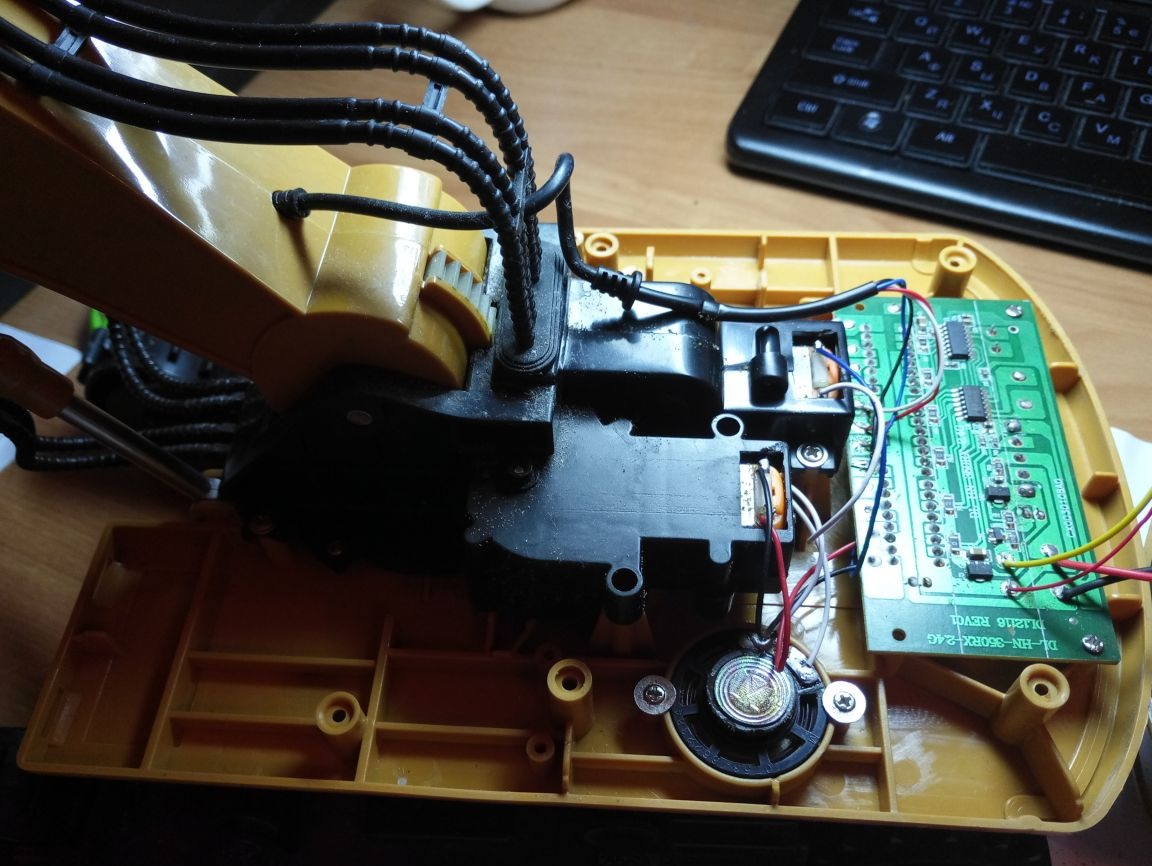
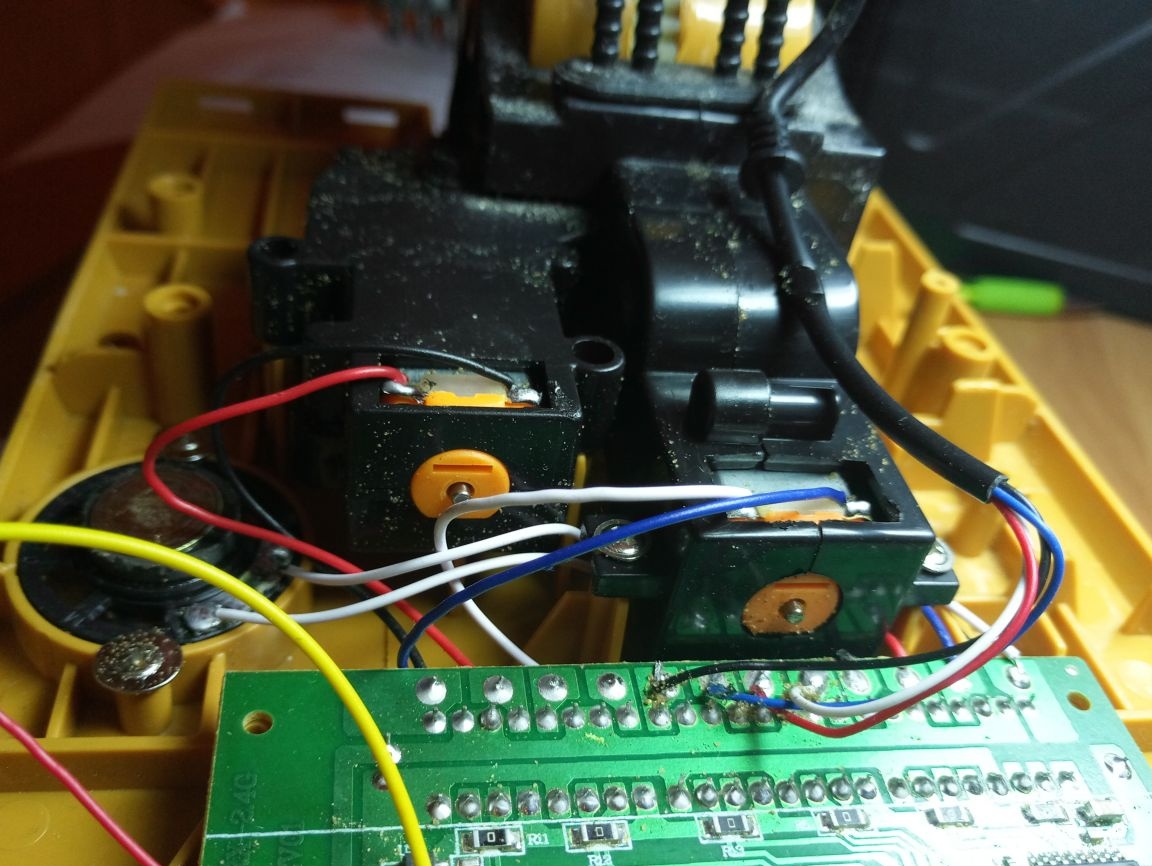
itse mekanismit purettiin vain rungosta, ei kiivetä nuoleen