
Hyvää päivää kaikille rakkaille ystäville! Haluan näyttää tämänpäiväisessä artikkelissa melko mielenkiintoisen idean kotitekoinen, jonka voi tehdä melkein kuka tahansa, joka on tehnyt ainakin vähän käsityöt ja kuka tietää vähän Arduinosta.
Yleensä tänään teemme yksinkertaista robotit pahvi pölynimuri tee se itse. Mutta sinä kerro minulle, koska sanoin jo, kuinka tehdä robotti siivoojaksi itse, ja olet oikeassa, mutta tämä robottipölynimuri on paljon yksinkertaisempi, halvempi ja kätevämpi kuin edellinen. Kyllä, ja tämä malli muokattu ja näyttää paremmalta, ja siinä on myös täysi automaatio. tämä outoa työ, ei vain autta ajan kulumista, vaan siitä tulee myös korvaamaton avustaja kotona tai työpajassa. Lyhyesti sanottuna, asia on hyödyllinen eikä ole monimutkainen.
No, niin tarpeeksi pitkää esipuhetta, mennään!
Joten tarvitsemme tätä kotitekoista tuotetta:
aaltopahvi (paljon pahvia)
-
kytkentäjohdot
-
-
- Vaihdemoottoreiden pyörät
-Ajureiden ajuri Arduinolle (kotitekoisen tuotteen kirjoittaja käyttää malliohjainta, joka sinun on vain asetettava arduinoon kytkeäksesi, mutta voit käyttää sinulle sopivaa ohjainta, tärkeintä on, että jännite vastaa vaihdemoottoreita)
-
- muoviset pullonkorkit
- harjakset luudasta
-moottori turbiinipuhaltimella, periaatteessa voit tehdä sen itse
muoviverkko
- pieni kontti
laatikko kahdelle 18650 paristolle
-
Tarvitsemme myös työkaluista:
juotin
liima-ase
toimistoveitsi
-lineyka
- lyijykynät tai merkit
Ensimmäinen askel on ottaa iso arkki pahvia, viivain ja kompassi. Mittaamme 13 cm kompassilla ja piirrämme ympyrän pahville, jonka jälkeen leikkaamme sen, tarvitsemme yhteensä kaksi tällaista ympyrää:


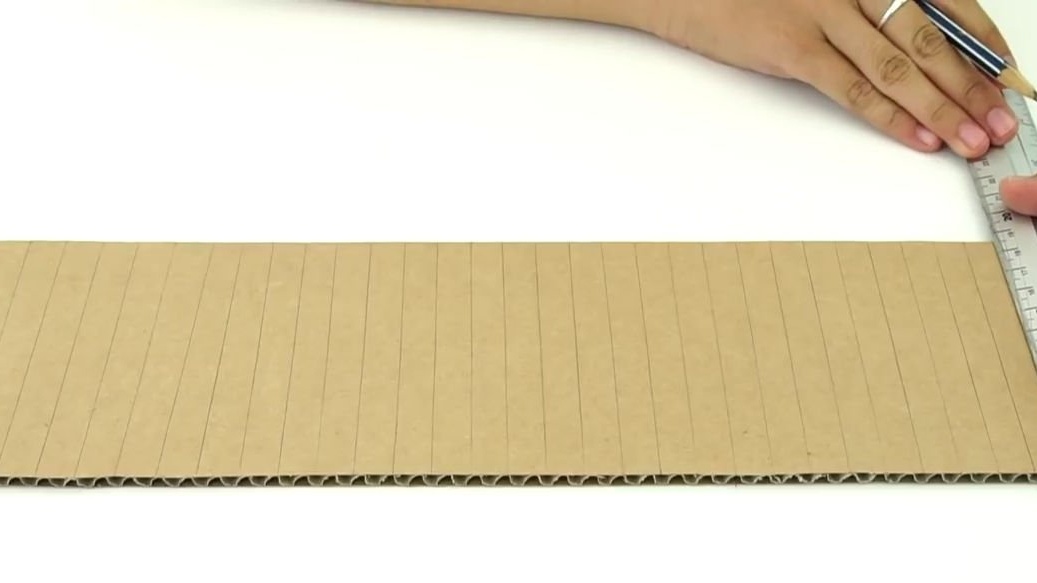
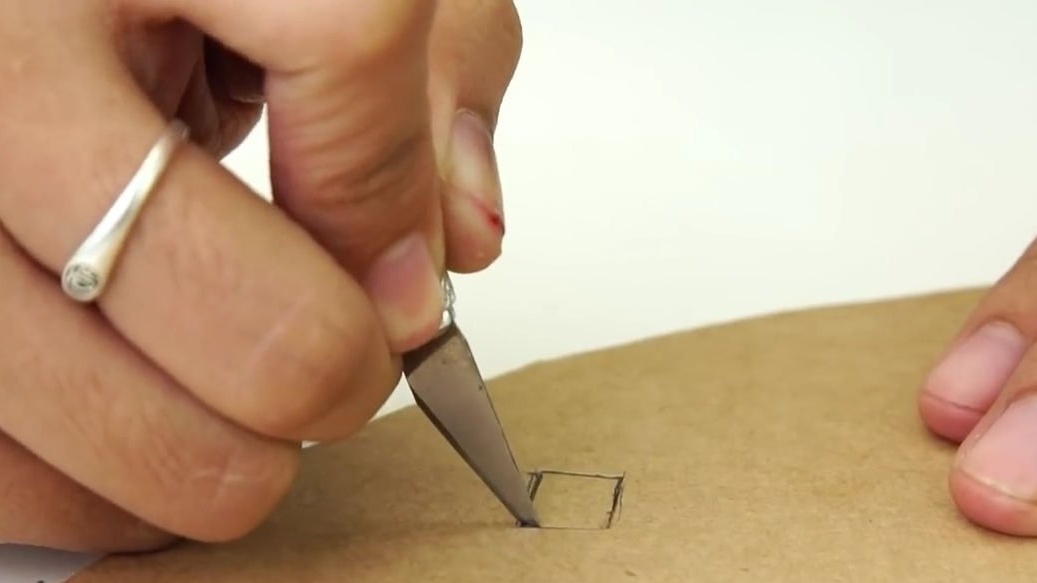
Sitten leikkasimme samasta pahvista ulos pienikokoisen suorakulmion. Otamme viivaimen ja lyijykynän, piirrämme lyijykynällä pahvia noin 1 cm: n välein. Tämän toimenpiteen jälkeen otamme toimistoveitsen ja teemme pieniä leikkauksia pahvikerroksen yläkerroksesta koskematta alaosaan. Tämä on välttämätöntä, jotta pahvi muuttuisi joustavammaksi:



Kierrämme varhaisen työkappaleen, joka on tehty yhden pahvin ympyristä, ja tietenkin liimaamme sen kuumalla liimalla:

Tarkastellaan elektroniikkaa ja mekaanista osaa.
Ota ensin vaihdemoottori ja laita pyörä siihen, samoin kuin teemme toisen moottorin kanssa:

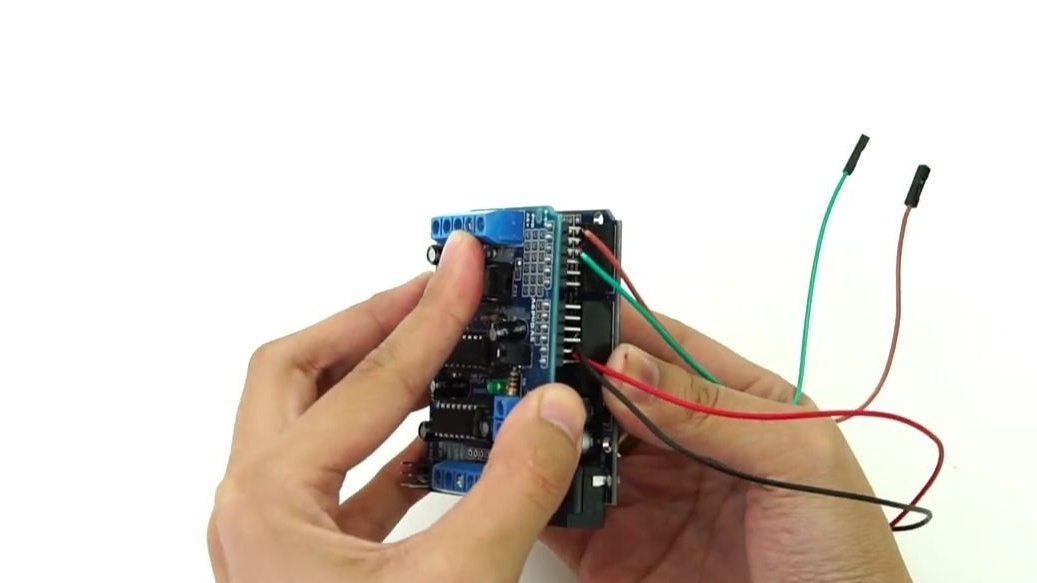
Sitten otamme Arduino Uno -kortin ja kytkentäjohdot, jotka puolestaan on kytkettävä tiettyihin taulun tappeihin (koskettimiin). Mukavuuksien vuoksi otamme erilaisia värejä: yhdistämme punaisen 5 voltiin, mustan GND: hen ja kaksi muuta kahteen erilaiseen tapiin. Mihin nastoihin johdot yhdistetään, sinun on heti selvitettävä koodin perusteella tai kirjoitettava neulat, joihin johdot on kytketty. Yleensä tässä ei ole mitään monimutkaista, yhdistämme:

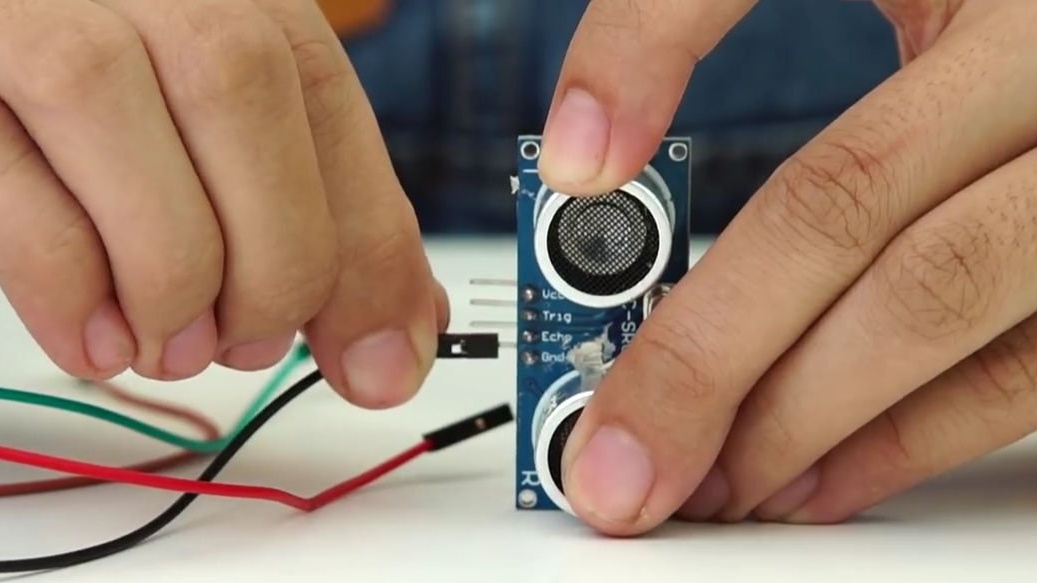
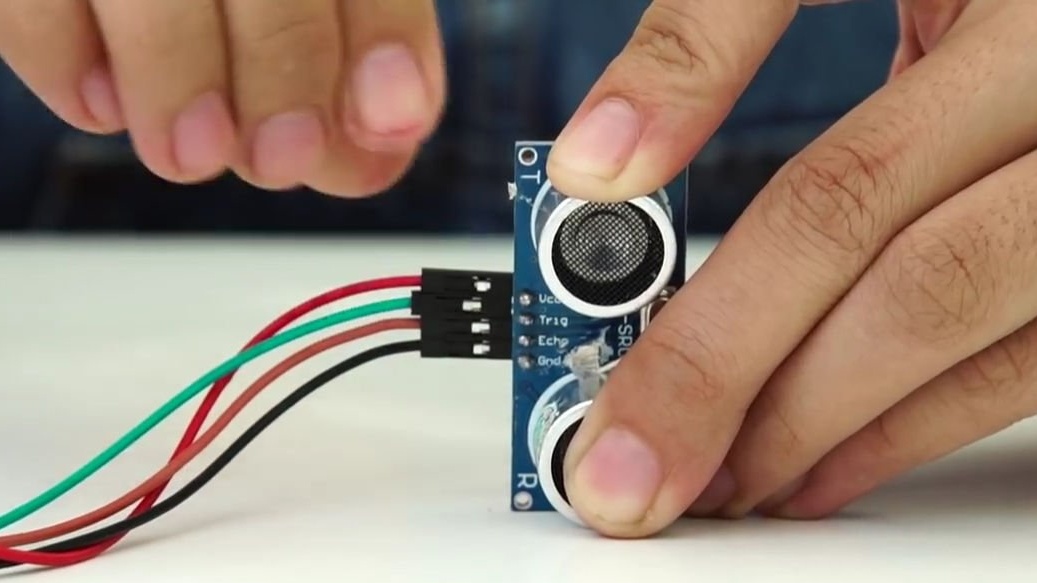
Yhdistämme johtimien vastakkaiset puolet ultraäänihakutoimintoon alla olevan kuvan osoittamalla tavalla. Jos se ei ole selvää, voit katsella tekijän videota.
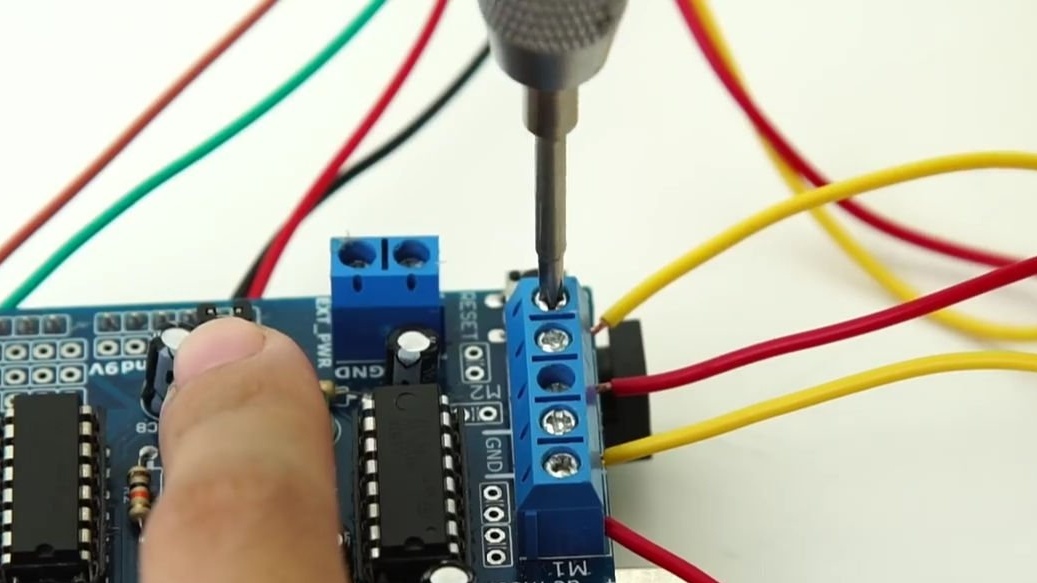
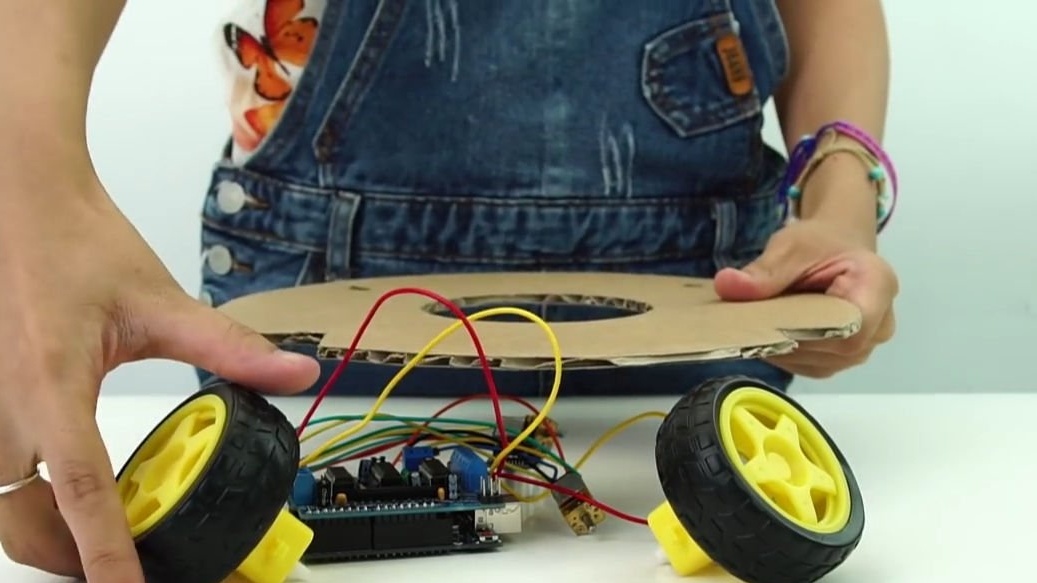
Yhdistämme vaihdemoottorit moottorin ohjaimeen, sinun ei tarvitse edes juottaa mitään, vaan aseta se puristimiin ja siinä kaikki:
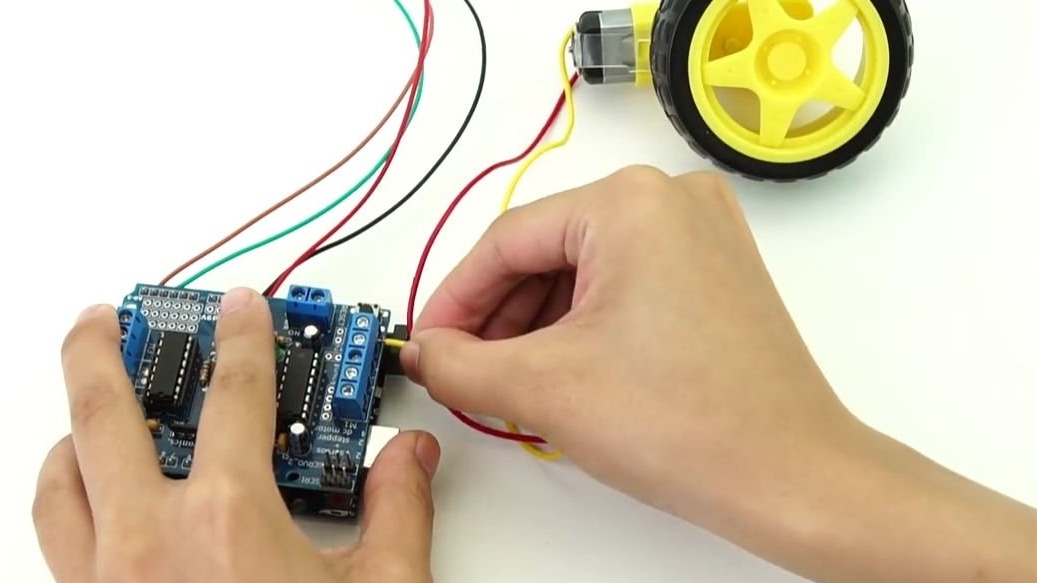

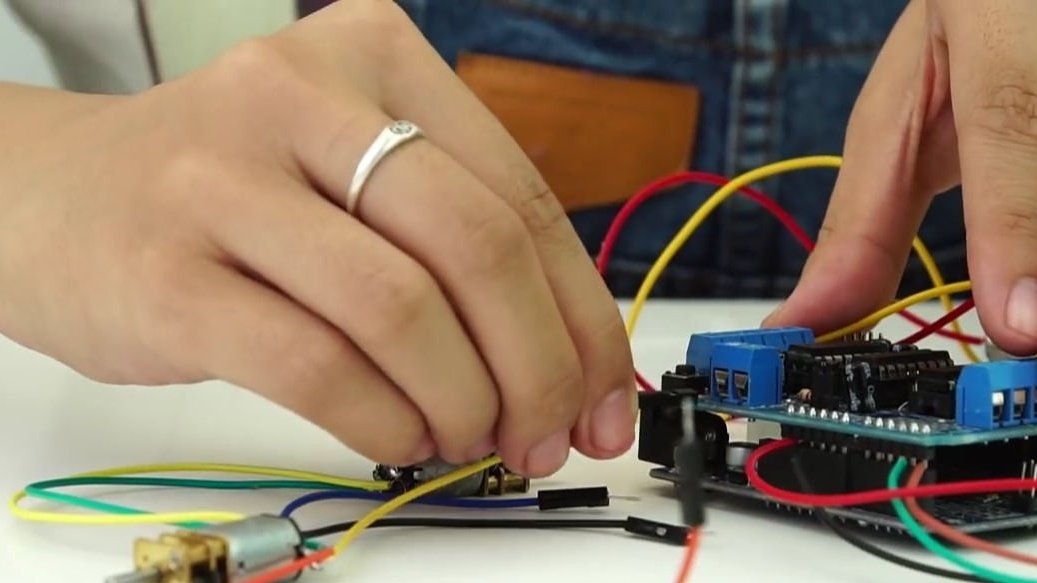
Minimoottorien kytkentäjohdot on juotettava, joiden avulla yhdistämme samat moottorit moottorin ohjaimeen. Yleensä yhdistämme:
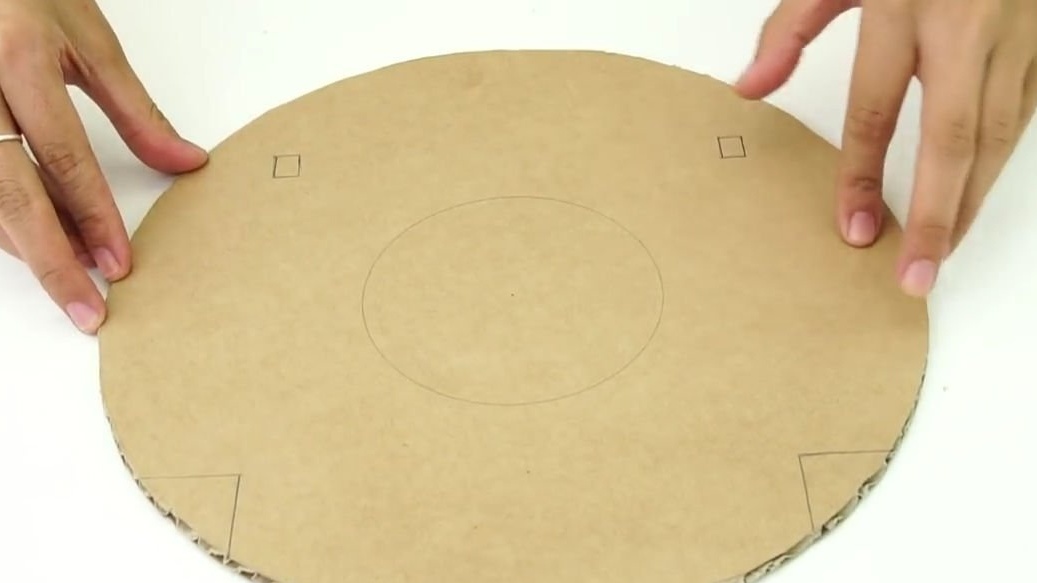
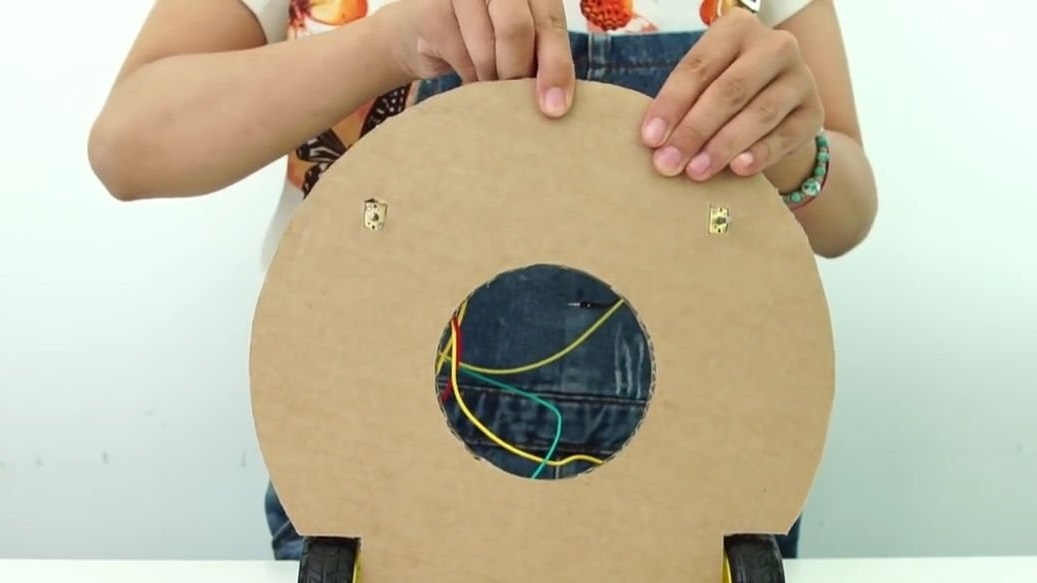
Nyt otamme jäljelle jäävän pahvin ympyrän, joka tehtiin heti alussa. Sitä varten sinun täytyy piirtää toinen ympyrä keskelle ja useita suorakulmioita. Voit nähdä kaikki merkinnät alla olevassa kuvassa. Leikkaa sitten merkityt reiät ulos, sen tulee osoittautua samalla tavalla kuin alla olevassa kuvassa:

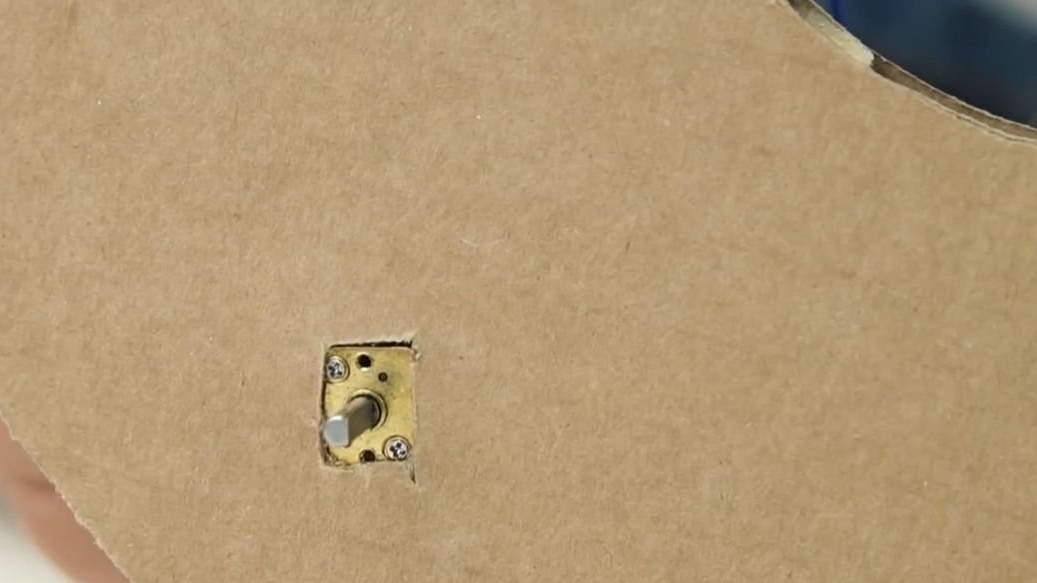
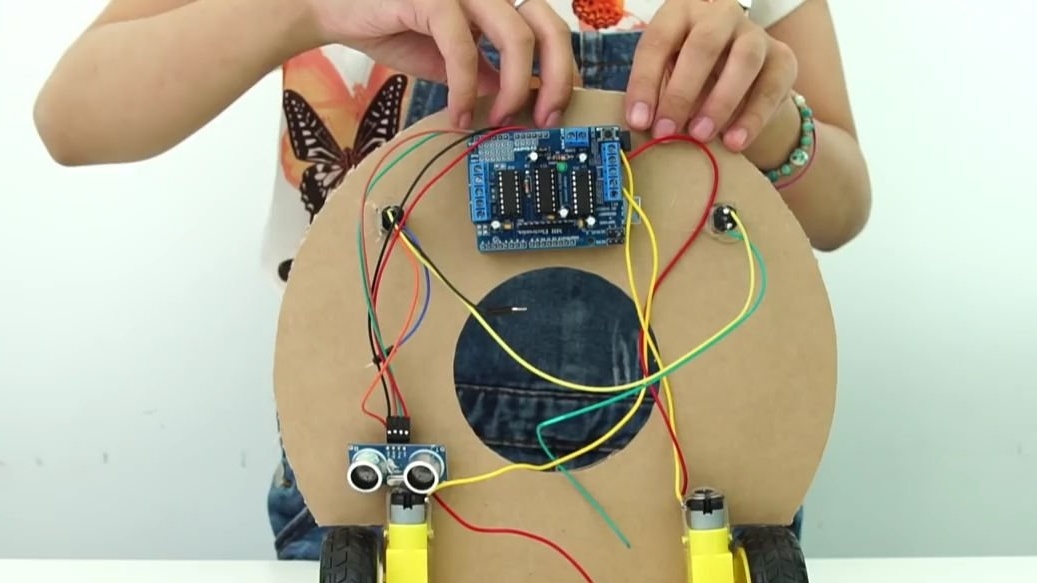
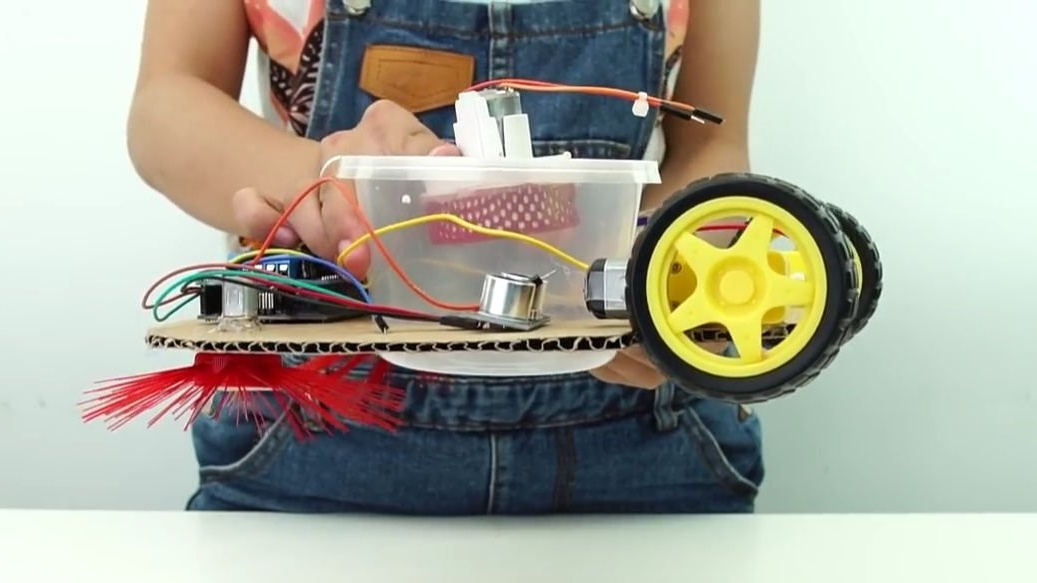
Ota koko elektroniikka ja aseta se aiemmin tehtyyn pahviympyrään. Asetamme pienet moottorit uritettuihin suorakaiteen muotoisiin reikiin ja kiinnitämme loppuosan elektroniikan sulateliimoihin, kiinnitämme suuret vaihdemoottorit takaosan suuntaan ja älä kosketa ultraäänetäisyysmittaria:

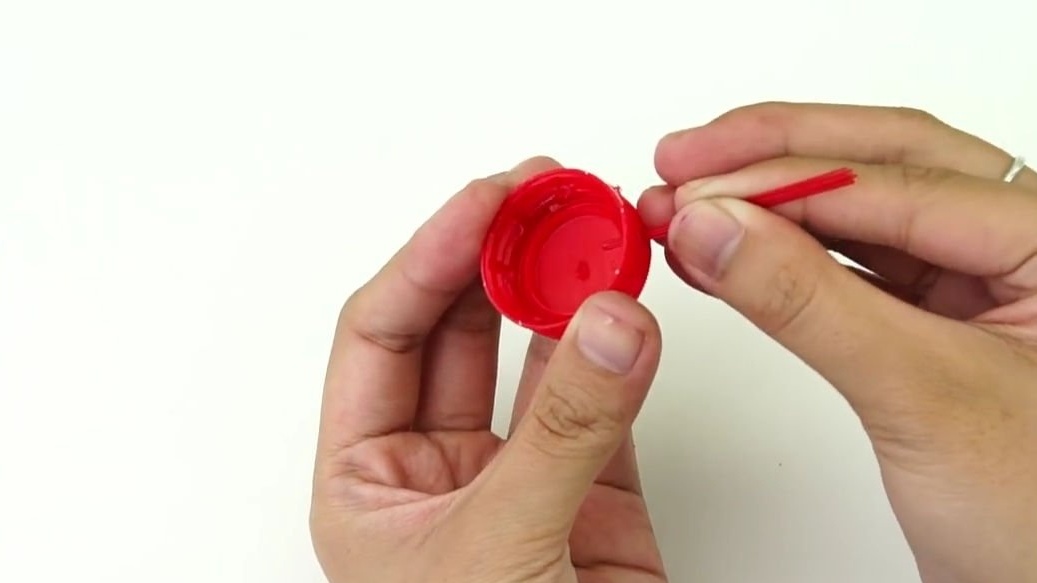
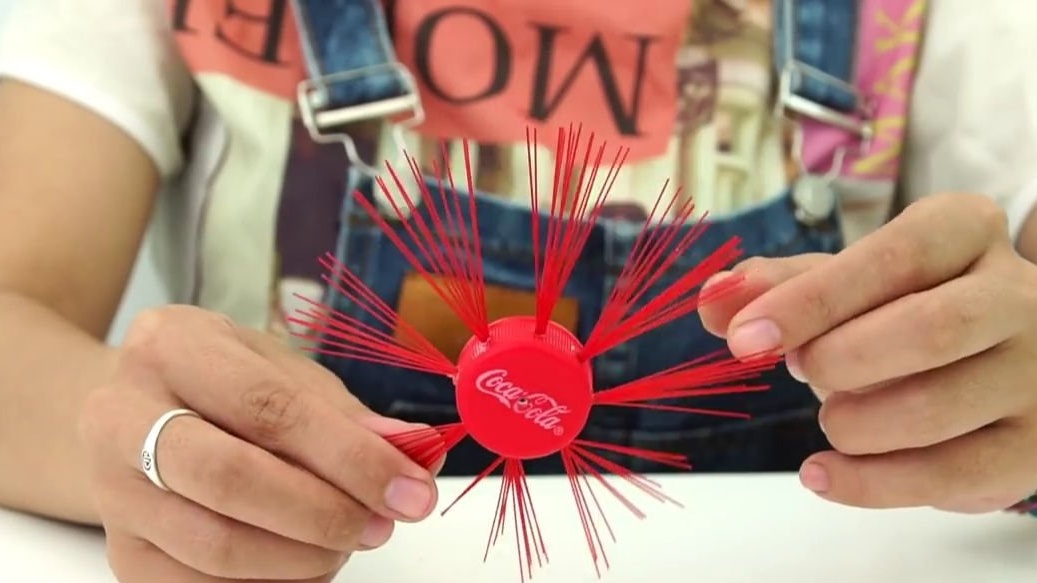
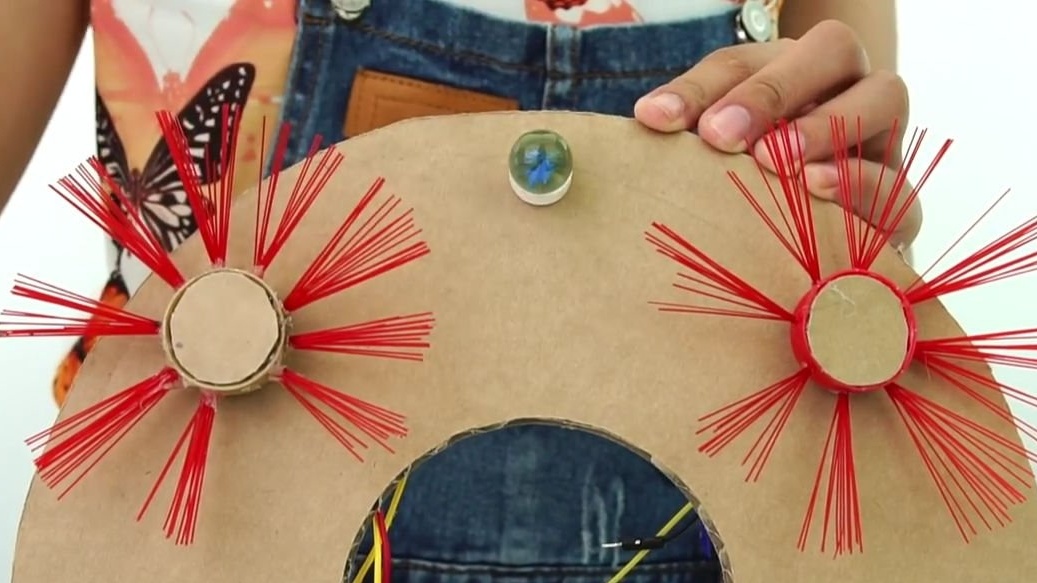
Poistamme korkit muovipulloista, tarvitsemme vain kaksi kappaletta. Muodostamme reikiä juotosraudan, kuuman naulan tai huivin avulla: yksi kannen keskelle ja toinen sivuille noin 1 cm: n sisennyksellä. Sivuihin tehdyissä reikissä pistämme aikaisemmin valmistetut harjakset harjasta, niiden tulisi olla samankokoisia. Kiinnitämme nämä harjakset kuumalla liimalla. Yhteensä on tehtävä kaksi tällaista aihiota.
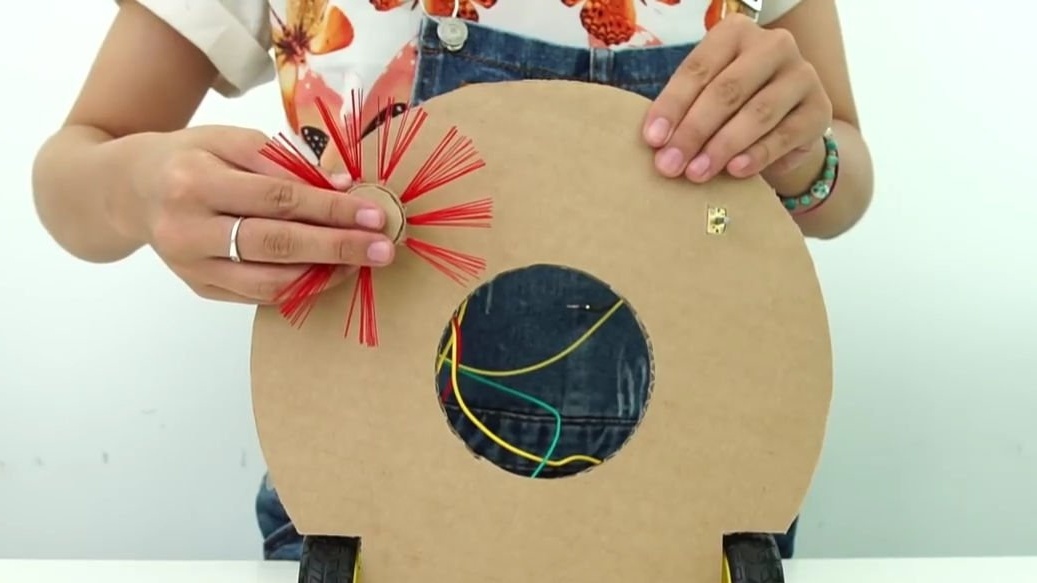
Liimaamme ne pienten moottorien akselille, jotka sijaitsevat pahviympyrällä. Liimaamme uudelleen kuumalla liimalla:



Liimaa edestä kahden harjan väliin pieni pallo tai pieni pyörä, joka voi pyöriä akselinsa ympäri:
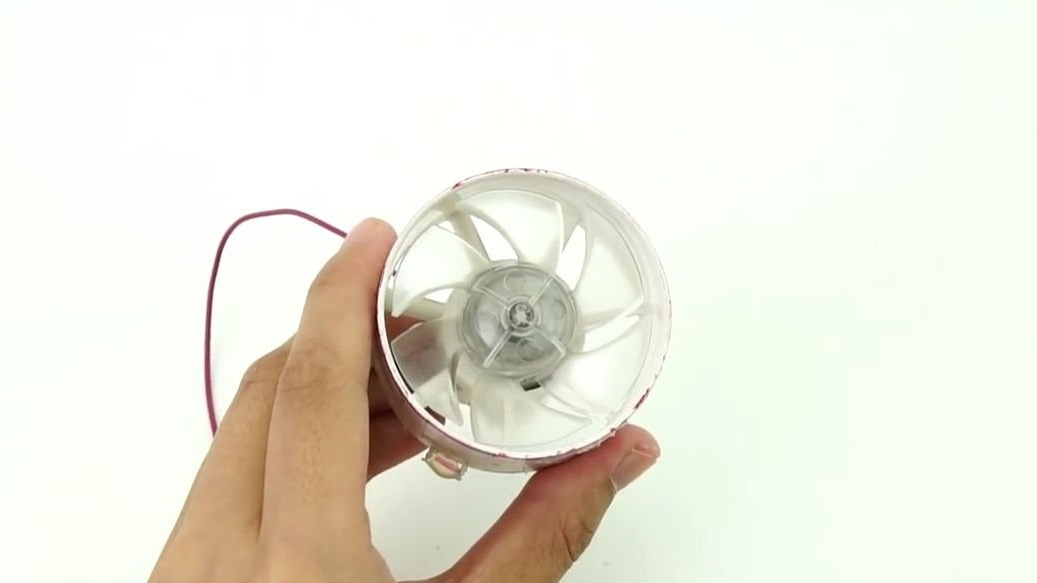
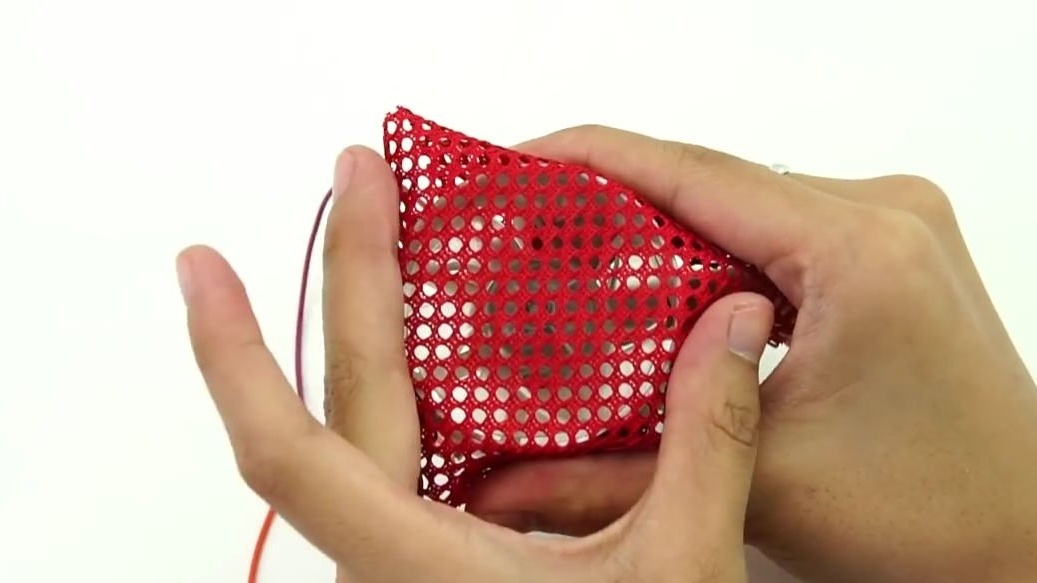
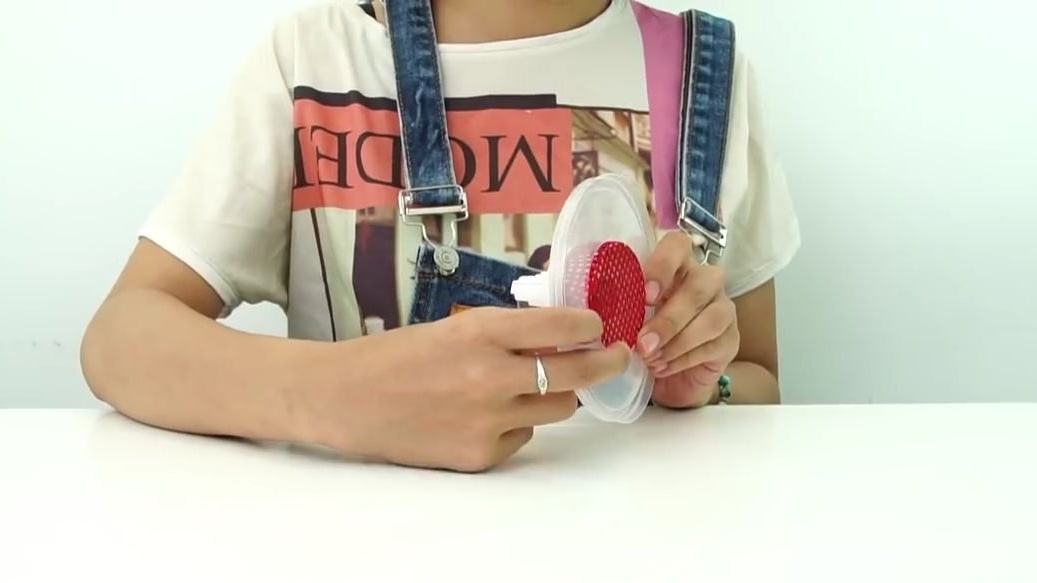
Nyt tarvitsemme sähkömoottoria, jossa on turbiini, joka voi imeä ilmaa, ja yleensä voidaan tuottaa erittäin voimakas jäähdytin. Laitamme päälle ja kiinnitämme muoviverkon turbiinin etuosaan, sitä tarvitaan turbiinin suojaamiseksi, toisin sanoen estämään suurten roskien pääsy ja seulonta. Poista muovisäiliön kansi. Astian tulisi olla mieluiten pyöreä. Kansiin tehdään tasainen pyöreä reikä, johon sinun on asetettava ja liimattava turbiini verkolla. Itse säiliössä teemme pienen suorakulmaisen reiän reunalla. Laitoimme kannen turbiinin kanssa astiaan ja olet valmis. Robotin imuosa on valmis. Haluan muistuttaa, että kaiken on tapahduttava alla olevan kuvan mukaisesti:



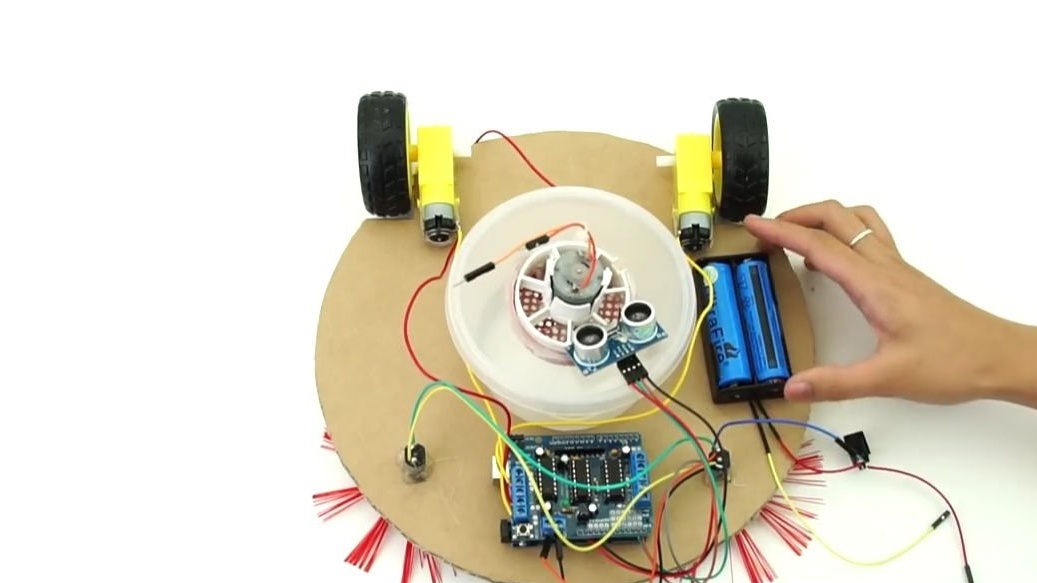
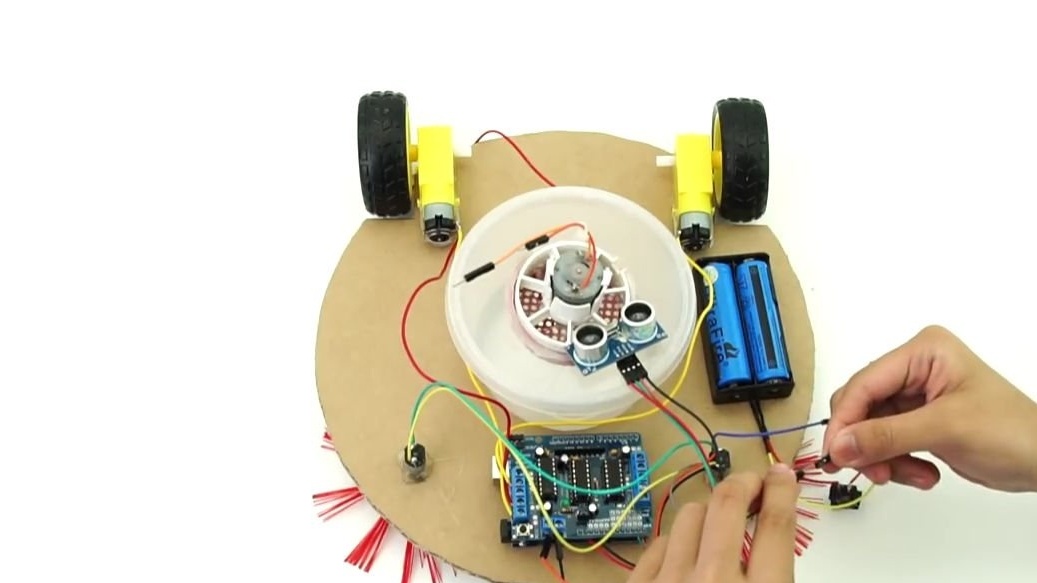
Otamme robotin pohjan ja asennamme säiliön, jossa on turbiini, keskiaukkoon ja liimaa kaikki tiukasti kuumalla liimalla. Sitten asennamme rakenteen sivulle laatikon, jossa on 18650 paristoa ja kytkimen, joka on kytketty johonkin laatikosta tulevasta johdosta. Yhdistämme uudet johdot Arduinon virran saamiseksi, teemme lopulliset leikkaukset ja voimme jatkaa.
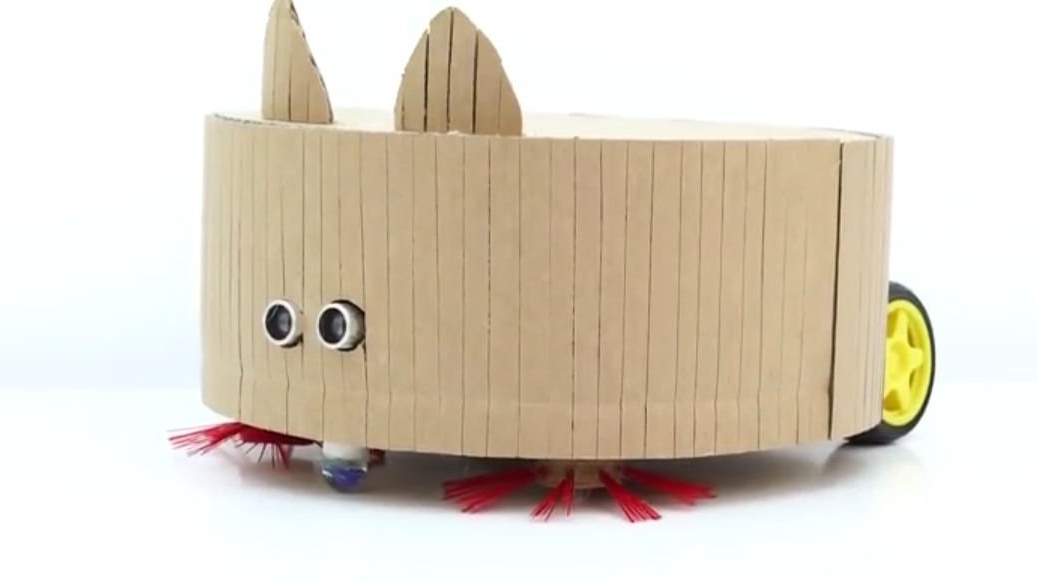
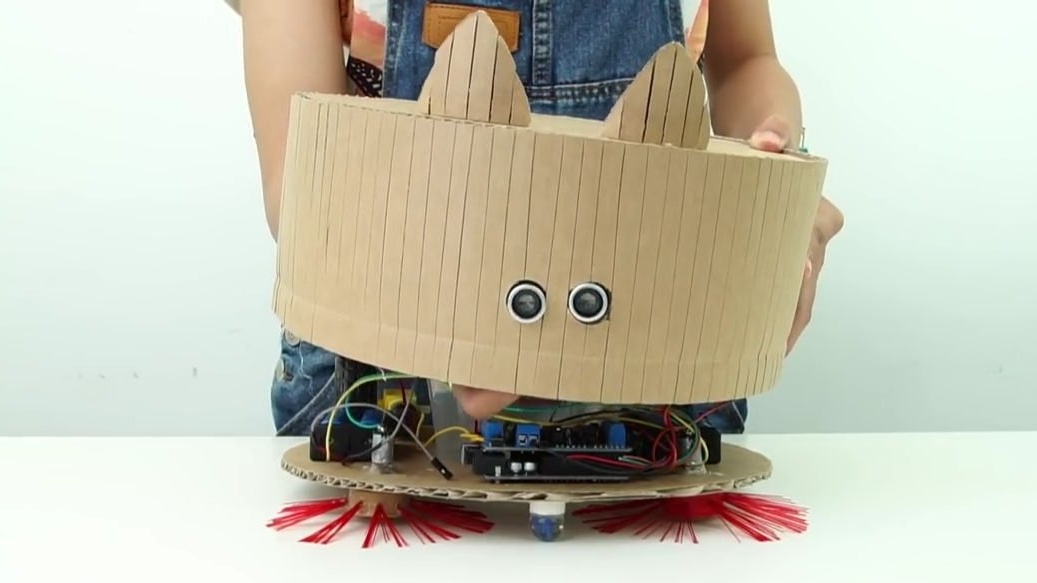
Asetamme ultraäänihaun erityisiin reikiin, jotka on tehtävä etukäteen robotin rungossa. Kuten ehkä muistat, tämä rakennus tehtiin alussa. Artikkelin kirjoittaja lisäsi myös koriste-elementtejä korvien muodossa, ja silmän sijasta tulee ultraääni-etäisyysmittari, kaikki tämä näyttää erittäin hyvältä. Laitamme kotelon rakenteen pohjan päälle ja kiinnitämme sen, mutta ei kovinkaan paljon, koska tällöin joudut hankkimaan akut lataamista varten.Voit tietysti asentaa mallin akkujen lataamiseksi suoraan robottiin, mutta se ei todennäköisesti korvaa korkealaatuista latausta.

Jäljellä on vain laiteohjelmiston lataaminen Arduinoon, yleensä on parasta tehdä tämä kytkettyäsi kaikki elektroniset komponentit tarkistaaksesi piirin ja koodin, mutta voit tehdä sen myöhemmin. On parasta kirjoittaa luonnos kaatamiseen Arduinoon itse, mutta voit helposti löytää Internetistä valmiiden luonnosten roboteille, joissa on yksi ultraäänianturi, joka menee esteen ympäri, tällaisten luonnoksien hyöty on nyt valmis. Mutta välttääksesi erilaisia sudenkuoppia, \ on parempi kirjoittaa itsenäisesti, itsellesi.
No, siinä kaikki! Yksinkertainen ja toimiva robottipölynimuri on valmis ja jää vain testaamaan sitä! Käännä se päälle ja avaa ajaa lattialla ja imuroida kaikki roskat. Robotti liikkuu itsestään ja kääntyy esteen lähestyessä, ja tämä on paljon helpompaa kuin aiemmat mallit.



Tässä on tekijän video yksityiskohtaisella kokoonpanolla ja kotitekoisilla testeillä:
Voit myös käyttää tätä robottia tehokkaalla pankilla. Katso tietysti yksityiskohtainen arvioni hyvästä hyvästä, joka on tästä kiinnostunut:
No, kaikille onnea tulevissa projekteissa, ystävät!