



Vaahtoleikkuri on loistava työkalu lentokoneiden osien valmistukseen. Tämän koneen avulla voit leikata tarkasti mitä tahansa aerodynaamisen profiilin muotoa CAD: n mukaan.
Koneessa on nikroomlanka, joka on venytetty kahden ohjaimen väliin. Virta johdetaan johtimen läpi, lanka kuumennetaan ja ohjaimet liikkuvat, leikkaamalla monimutkaisia muotoja, kuten kartiomaisia siipiä. Jokaista akselia ajaa askelmoottori karan, GT2-hihnan ja hihnapyörän läpi. Leikkausvoiman tulisi olla minimaalinen ja rakenteen oltava riittävän jäykkä kestämään tuen väliin venytetyn vaijerin kireyttä.
Tämä on todellinen 4-akselinen kone, joka voi leikata eri muotoja molemmilta puolilta samanaikaisesti, joten ongelmana on, kuinka hallita neljää riippumatonta akselia samanaikaisesti. Monet opetusohjelmat keskittyvät 3-akselisiin koneisiin, kuten 3D-tulostimiin, mutta 4-akselisen koneen luomiseen helposti saatavilla olevia osia ja avoimen lähdekoodin ohjelmistoja käytettäessä näyttää olevan riittämättömiä ohjeita. Mestari löysi useita ihmisiä, jotka tekivät samanlaisia projekteja käyttämällä Työläs ja Grbl, ja päätti tehdä oman koneen.
Työkalut ja materiaalit:
- vaneri (12mm);
-Metallitangot;
- Lyijyruuvi (M8 x 600 mm);
-Moottorin kytkentä M8-M5 (M8 johdinruuville ja M5 moottorin akselille);
-Arduino Mega 2560;
-RAMPS 1,4;
-Step-moottorit (yksi kullekin akselille);
-A4988 askelmoottori (yksi jokaiselle askelmoottorille);
- 12 V: n virtalähde Arduino + luiskeille;
- vaihteleva virtalähde (Lipo-laturit, joissa kuumavirtaustila);
-Nikroomlanka;
Vaihe yksi: Ohjelmisto
4-akselisen CNC: n luomisen vaikea osa on löytää ohjelmisto G-koodin generoimiseksi ja koneen ohjaamiseksi. Marginally smart -ohjelman kehittämä ohjelmistohaku johti https://www.marginallyclever.com/2013/09/how-to-build-a-4-axis-cnc-gcode-interpreter-for-arduino/ luojaan, joka käyttää Arduino Mega 2560 ja CNC Ramps 1.4 -näyttö.
Seuraavat kirjoittajat ovat käyttäneet joitain tietoja: RcKeith ja rcgroups.com
Grbl Hotwire -ohjain.zip
GRBL8c2mega2560RAMPS.zip
FoamXL 7.0.zip
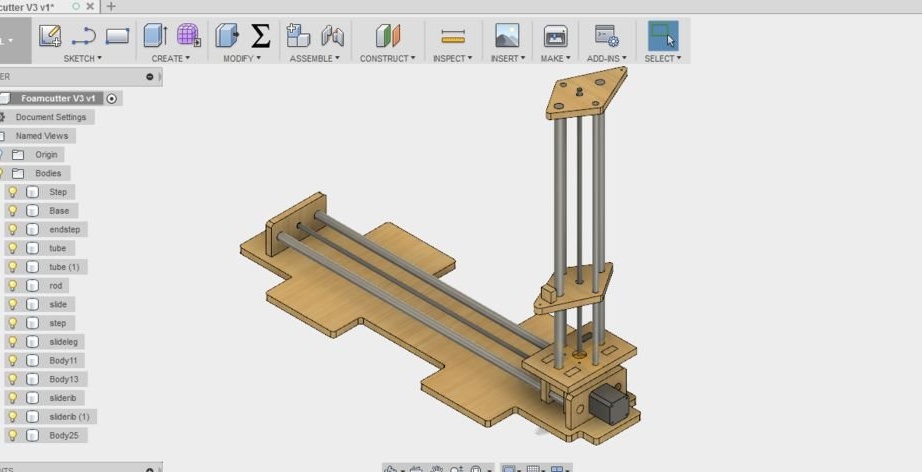
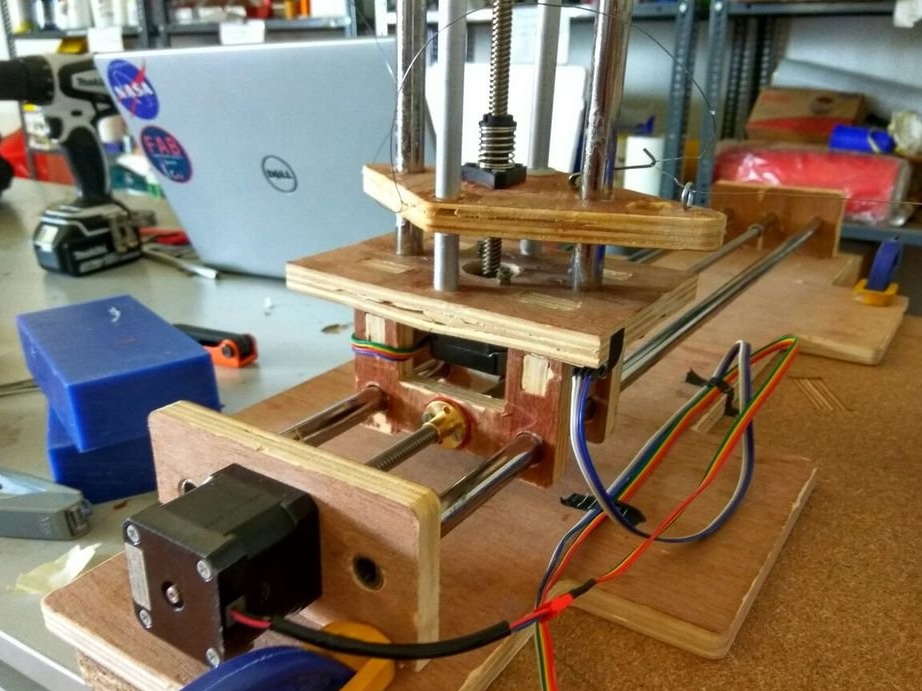
Vaihe toinen: konekokoonpano
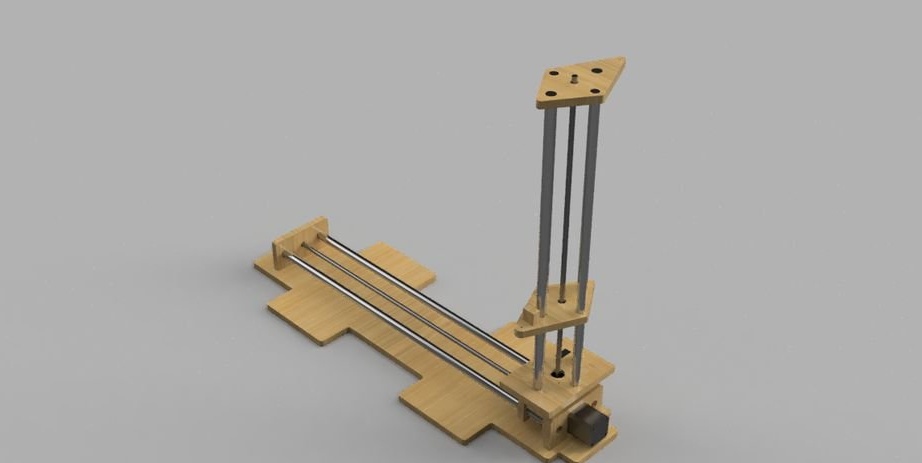
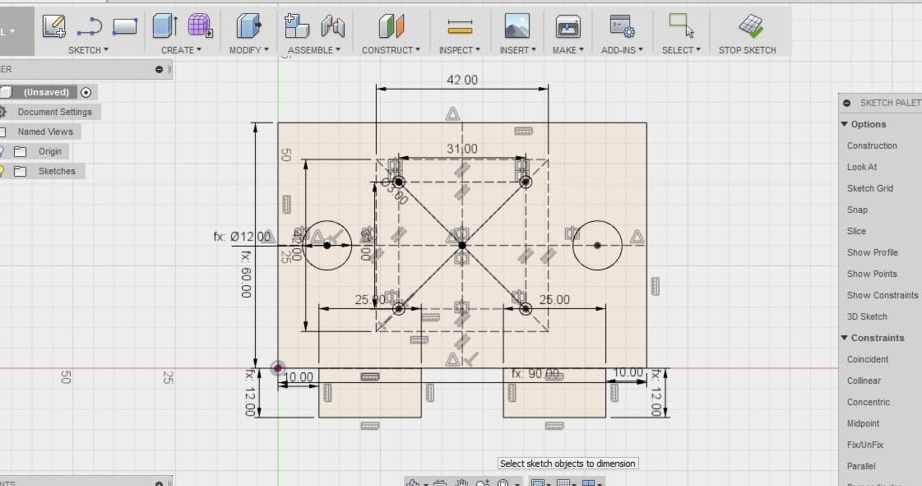
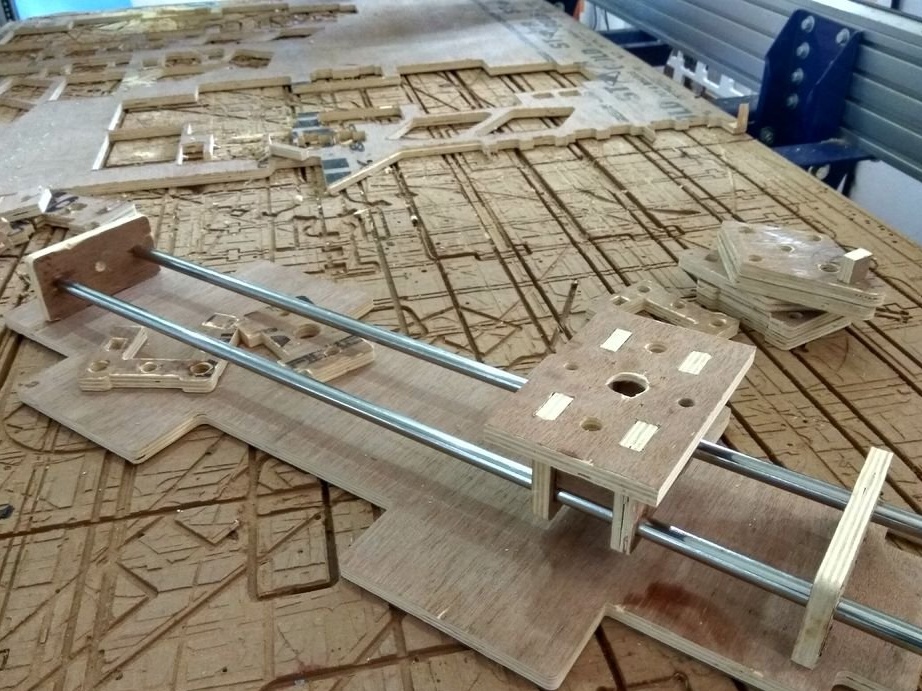
Suunnittelu on valmistettu 12 mm vanerista, lineaarinen kokoonpano on valmistettu teräsputkista, joiden halkaisija on 1/2 tuumaa ja joissa vanerin liukukappaleet. Liukalohkojen suunnittelua voidaan parantaa asentamalla lineaarinen laakeri tai holkki.Koska isäntä käyttää johdinruuvia, hänellä on riittävä vääntömomentti kitkan voittamiseksi ilman laakeria. Kaksi teräsputkea tukevat ja pitävät ohjauslohkoa samalla akselilla.
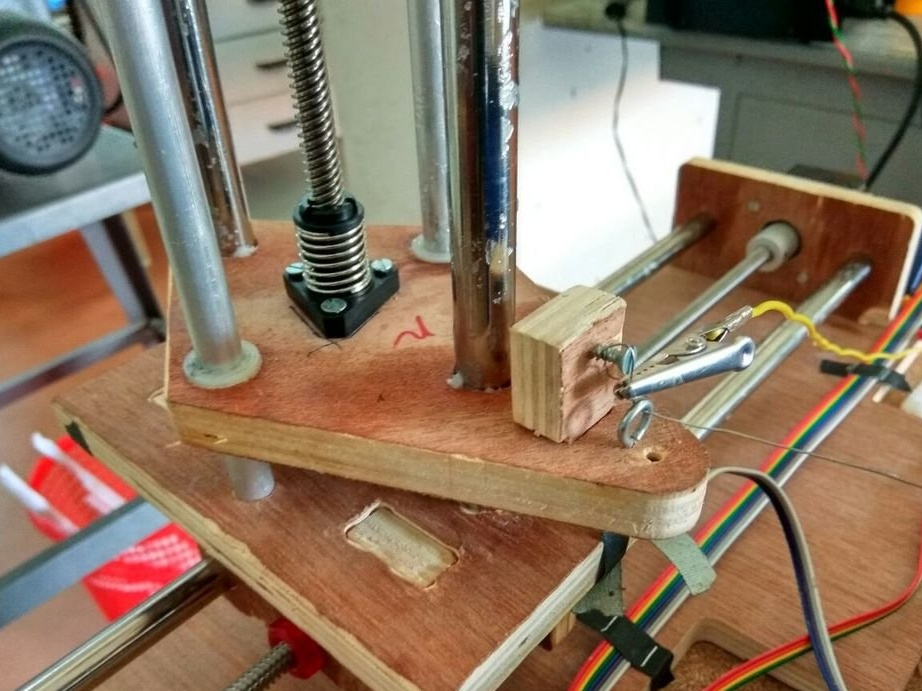
Pystypylväät asetetaan vaakaohjainlohkon päälle. Siinä on neljä putkea.
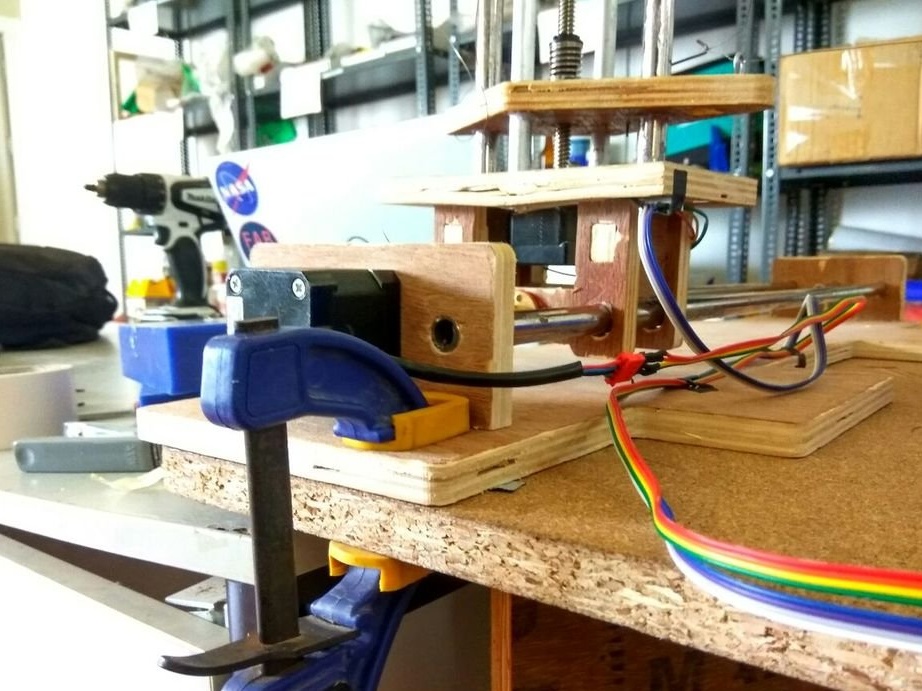
Käyttöruuvi kiinnitetään askelmoottoriin joustavalla kytkimellä. Tämä auttaa akselin ja ruuvin pienissä kohdissa. Pystyasennossa on askelmoottori, jossa on sisäänrakennettu johtoruuvi, joka voidaan ostaa tai korvata tavanomaisella askelmoottorilla ja kytkimellä.
Molemmat konetelineet ovat identtisiä. Alustassa on paikka koneen kiinnittämiseen työpöydälle.


Huom. Liukulaakereita käytettäessä voi materiaalista riippuen esiintyä ilmiö, jota kutsutaan ”tarttumiseksi ja liukumiseksi”. Tämä voi aiheuttaa liikkeen epätasaisuuden ja aiheuttaa tärinää. Se voi myös johtaa tukkeutumiseen, aiheuttaen liiallisia kuormia ja ohitetut vaiheet askelmoottoria käytettäessä.
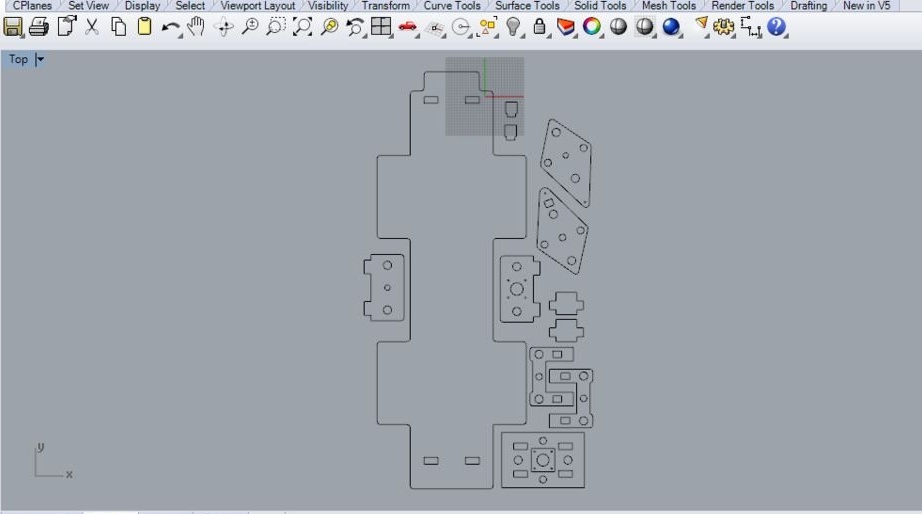
Foamcutter_base.dxf
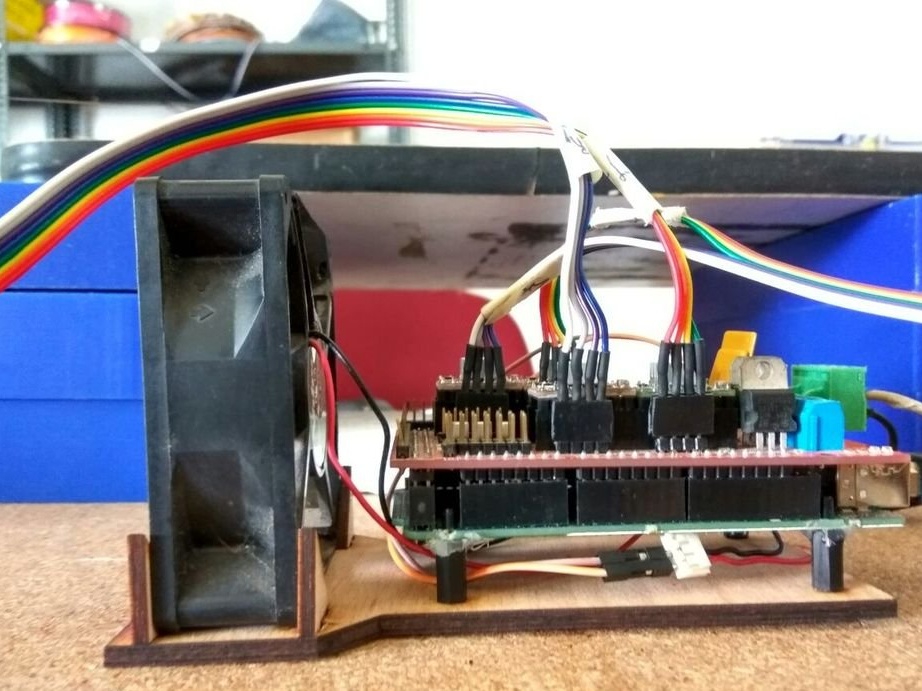
Vaihe kolme: Yhdistä elektroniikka
Seuraava vaihe on kytkeä elektroniikka, siirtää moottoreita ja asentaa kone. On 4 askelmoottoria, jotka on kytkettävä ramppi-alustaan. Johdot on asennettava kokonaan akselin riittävän liikkeen varmistamiseksi.
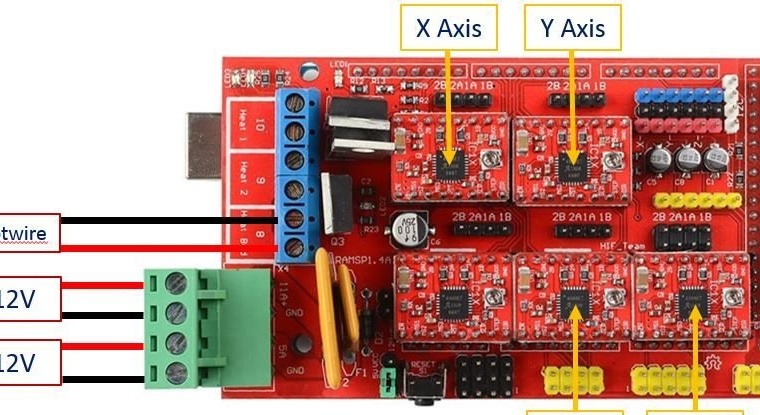
Kaikki johdotukset on kytketty ramppilevyyn, joka on CNC-näyttö Arduino Mega2560: lle. Ramppi voi tukea jopa viittä askelmoottoriohjainta, kuten A4988. Mestari käyttää Nema 17 -moottoreita.
Ennen kuin asennat ramppilevylle, varmista, että A4988-siru on suunnattu oikein. Jokainen askelmoottori voi vetää korkeintaan 2 A, askelmoottoriohjaimet on varustettu pattereilla lämmönpoistoa varten. Taulussa on myös MOSFET 11A, joka ohjaa napaan D8 kytketyn johtimen lämpötilaa. Kaikki levyn komponentit lämmitetään, varmista, että oikea jäähdytys on varmistettu.
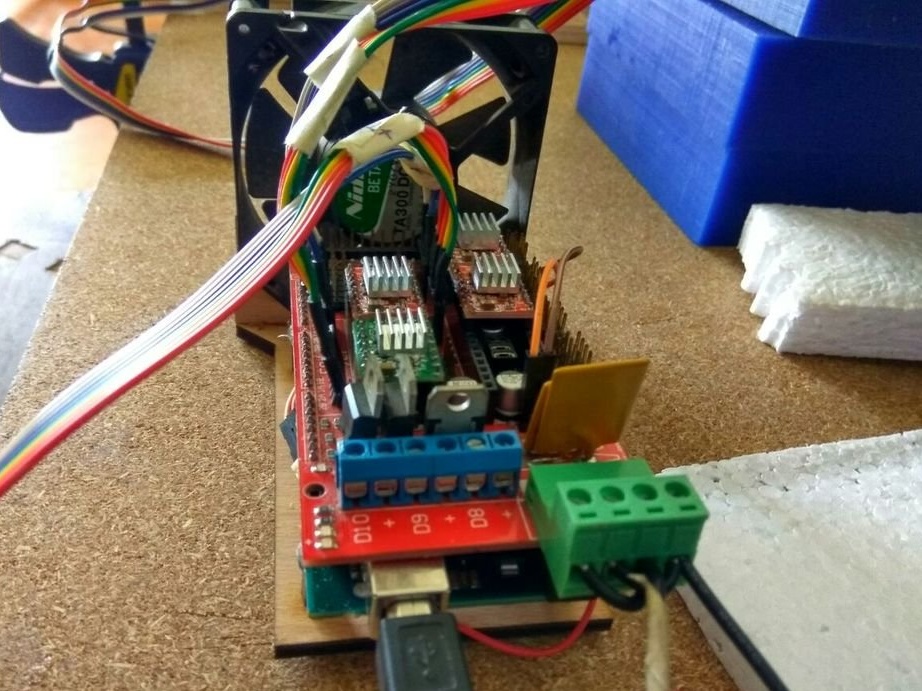
Kun järjestelmä kytketään päälle, askelmoottorit jatkavat virran vetämistä pitoasennon ylläpitämiseksi. Komponentit, kuten Stepper- ja MOSFET-ohjaimet, voivat kuumentua erittäin kuumiksi käytön aikana. Älä käytä ramppeja ilman aktiivista jäähdytystä.
Päälaserleikkaus kattoi Arduinon ja Rampin jalustan ja liitti 12 V tuulettimen aktiivisen jäähdytyksen aikaansaamiseksi levylle.
Vaihe neljä: Asennus
Jokainen CNC on määritettävä oikein ennen työn aloittamista. Koska askelmoottoreita käytetään avoimen silmukan järjestelmässä (ilman palautetta), sinun on tiedettävä, kuinka pitkälle vaunu kulkee askelmoottorin jokaisen kierroksen kanssa. Se riippuu vaiheiden lukumäärästä moottorin kierrosta kohden, karan äänenkorkeudesta ja käytetyn mikromuutoksen tasosta.
steps_per_mm = (motor_steps_per_rev * driver_microstep) / thread_pitchSe käyttää askelmoottoria, jonka nousunopeus on 200 rpm. ajaa A4988-ohjain nopeudella 1/16 mikrosekunnilla, lyijyruuvilla 2 mm: n välein.
Vaiheet_per_mm = (200 * 16) / 2 = 1600Ruuvi, jota isäntä käytti, oli kaksipuolinen, joten arvo on puoli edellä määritettyä, ts. “800”. Jos ruuvi on nelivaiheinen, arvo on neljäsosa yllä olevasta.
Kun Mega 2560 on vilkkunut Grbl8c2MegaRamps-tiedostolla, avaa sarjaporttinäyttö ja kirjoita ”$$” päästäksesi Grbl-asetuspaneeliin. Jos haluat muuttaa arvoa, kirjoita $ number = arvo. Esimerkiksi 0 dollaria = 100 kun olet asentanut laitteen, varmista, että kone siirtää tarkkaa arvoa ohjaimen osoittamalla tavalla.
Vaihe viisi: nikroom
Vaahdon leikkaamiseksi tarvitset sopivasta materiaalista valmistetun langan, joka kestää kuumentamisen ja jolla on sama lämpötila koko pituudella.
Nikromi on sopiva materiaali. Parasta on käyttää mahdollisimman ohutta viiraa urien vähentämiseksi leikkaamisen aikana ja puhtaan leikkauslinjan varmistamiseksi. Pääsääntö on, että mitä pidempi lanka, sitä suurempi kireys on, ja paksumpi lanka on.
Seuraava vaihe on kiinnittää nikroomilanka koneeseen. Koska meillä on 4 erillistä akselia, emme voi vain napsauttaa vaijerin molemmat päät tuille.Vaijerilla tulisi olla jonkin verran pidennystä joko jousen avulla tai päihin kiinnitetyn painon avulla.
Jatkuva jännitys voidaan kohdistaa vaijeriin jousella, jolla on vakiovoima tai ripustettava paino lopussa. Halpa tapa saada jousi jatkuvalla voimalla on käyttää Henkilökortti kelat.

Vaihe kuusi: Ohjelmistojen ja G-koodien luominen
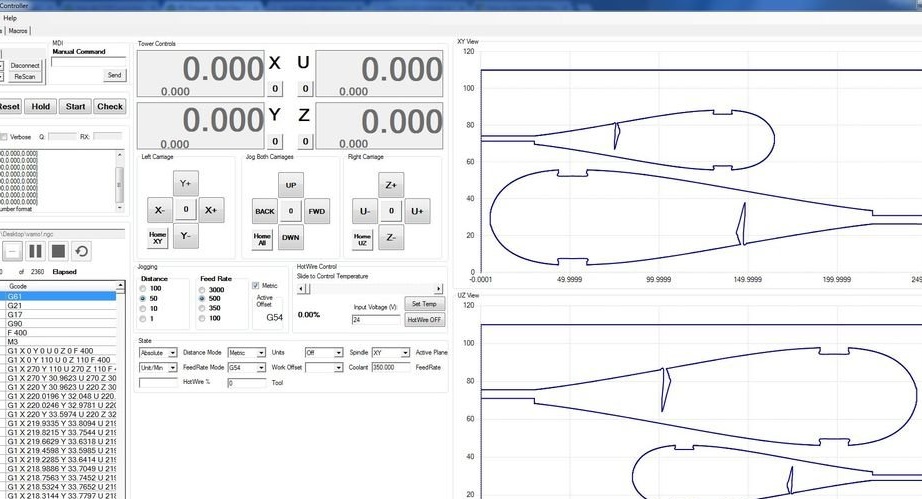
Grbl Hotwire -ohjain
Ohjattu toiminto käyttää Garret Visserin kehittämää Grbl-ohjauspaneelia, jonka Daniel Rassio mukautti leikkaamaan Hotwire. Paneelissa on riippumaton tilanohjaus kaikille akseleille. Siellä on myös visualisointityökalu, ”Gcode” -käyrä ja mahdollisuus tallentaa omia makrojasi. Hotwire-lämpötilaa voidaan säätää painikkeilla M3 / M5 päälle / pois päältä ja S-komennolla “xxx” lähtöjännitteen asettamiseksi joko manuaalisesti tai käyttämällä ohjelmiston vierityspalkkia. Kuuma johto on kytkettävä “D8” -lähtöön ja saa virtansa virtalähteestä, joka on kytketty johtojen liitoskohtien “11A” -tuloon.
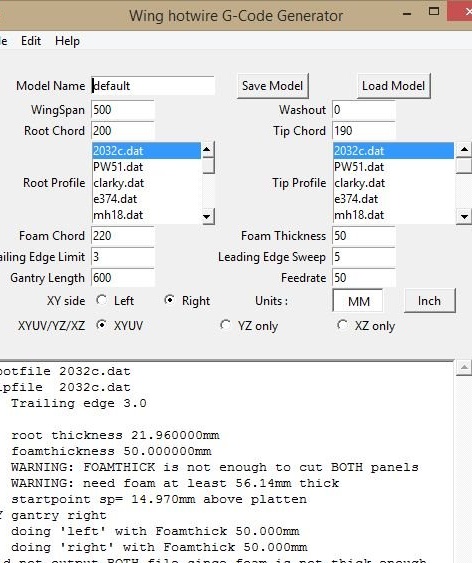
Siipi g-koodigeneraattori
Siipi g-koodigeneraattori on ohjelma XYUV GY-koodin generoimiseksi lentokonemallin siipien kuumaan leikkaamiseen. Se toimii Python 2.7: llä ja voi myös integroitua LinuxCNC Axis-käyttöliittymään. On myös online-versio. Tämän avulla voit syöttää siipin eri parametrit. Aerodynaamisista profiileista on tietokanta .dat-muodossa. Uudet profiilit voidaan tuoda samalla tavalla.
Tätä ohjelmistoa on helppo käyttää ja se tukee siipien kerrostamista samalle vaahtomuoville materiaalin säästämiseksi. Lähtö G-koodi voidaan lähettää koneelle Grbl-ohjaimen kautta.
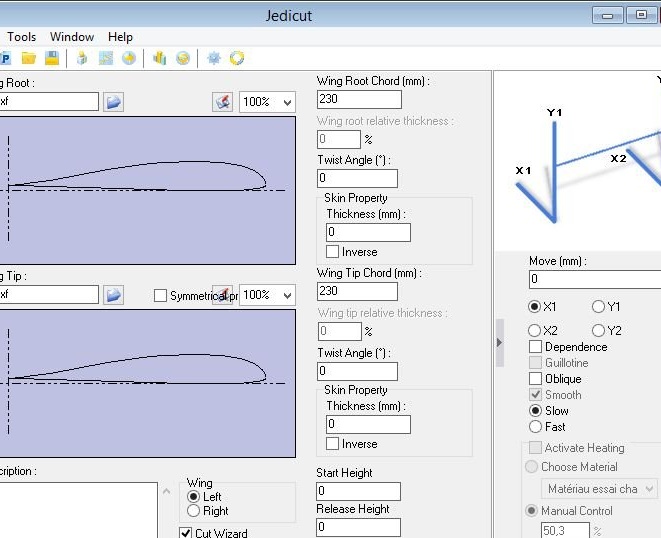
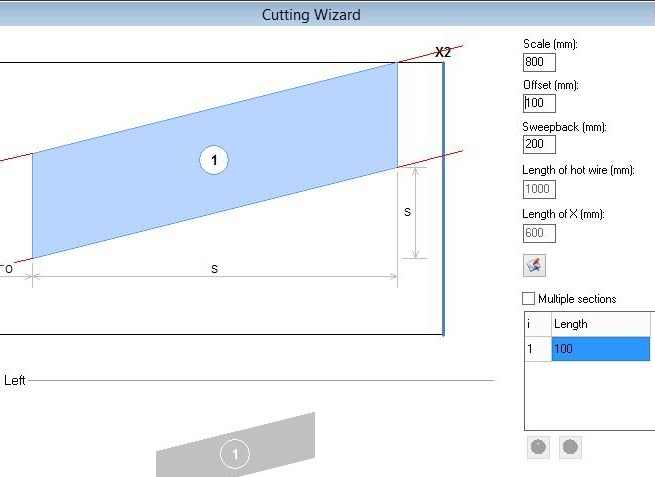
2.4 Jedicut
Jedicut - Tämä on siisti ohjelma, joka voi suorittaa sekä CAD / CAM että suorittaa koneohjaimen toiminnot. G-koodin luomiseen on myös laajennus. Tämä ei ole helpoin määrittää ohjelma. Jotkut vaihtoehdoista ja virheilmoitukset ovat ranskaksi, mutta jos työskentelet sen kanssa jonkin aikaa, voit saada sen toimimaan.
Wingin G-koodi tuottaa G-koodit absoluuttisessa tilassa, joka toimii Grbl: llä ilman ongelmia, mutta Jedicut luo G-koodin inkrementaalitilassa. Mestarilla oli vaikeuksia ensimmäisessä käynnistyksessä, kun auto yksinkertaisesti liikkui edestakaisin. Jos näin tapahtuu, muokkaa G-koodia poistaaksesi tarpeettomat rivit otsikosta.
Sekä Wing G -koodi että Jedicut generoivat G-koodin, joiden otsikossa on joitain tukemattomia Grbl-koodeja. Ohjain näyttää näytöllä, kun tällaisia virheitä tapahtuu. Muokkaa G-koodia ja poista tarpeettomat rivit.
Sisältää toimivat G-koodit molempien ohjelmien kanssa, tarkista niiden avulla ohjain.
Jedicut.rar
winggcode.rar
Seitsemäs vaihe: syöttönopeuden ja lämpötilan asettaminen
Toisin kuin perinteisessä jyrsinnässä, lanka leikataan sulattamalla vaahtoa. Kun lanka pysyy jonkin aikaa yhdessä asennossa, ympäröivä materiaali sulaa edelleen. Tämä lisää leikkauksen uraa ja aiheuttaa koon epätarkkuuksia. On kaksi muuttujaa, jotka vaikuttavat leikkauksen leveyteen.
Leikkaussyöttöarvo.
Langan lämpötila.
Leikkauksen syöttönopeus on nopeus, jolla lanka leikkaa materiaalin läpi, mieluiten mm / min. Mitä suurempi nopeus, sitä pienempi rako on, mutta korkeampi vaaditun lämpötilan ja langan kireyden tulisi olla riittävä. Hyvät lähtönopeudet ovat välillä 350 - 500 mm / min.
Langan lämpötilan tulisi olla hiukan korkeampi kuin vaahdon sulamislämpötila. Lämpötilaa säädetään johtimen läpi virtaavalla virralla.
On ohjelmistoja, jotka sallivat langan PWM-ohjauksen lämmittää sitä oikeilla hetkillä leikkauksen syöttönopeuden optimoimiseksi. Langan lämpötila määritetään virran neliön kertoimella.
Siellä on erityinen laskinjossa voit tehdä kaikki tarvittavat laskelmat.
Kahdeksas vaihe: Koneen käyttö
Prosessi alkaa suunnittelulla, joka viedään DXF-tiedostona. Tämä tiedosto tuodaan sitten CAM-ohjelmistoon ja tulostetaan G-koodina. Kone kytketään päälle ja kalibroidaan. Materiaali asetetaan työpöydälle ja lähtöasento asetetaan. Suorita G-kooditiedosto ja katso, kuinka laite tekee kaiken työn puolestasi.
Mestarin mukaan kone on helppo valmistaa ja helpottaa lentokonemallien työtä.




Alla olevassa videossa on esimerkki koneesta.