
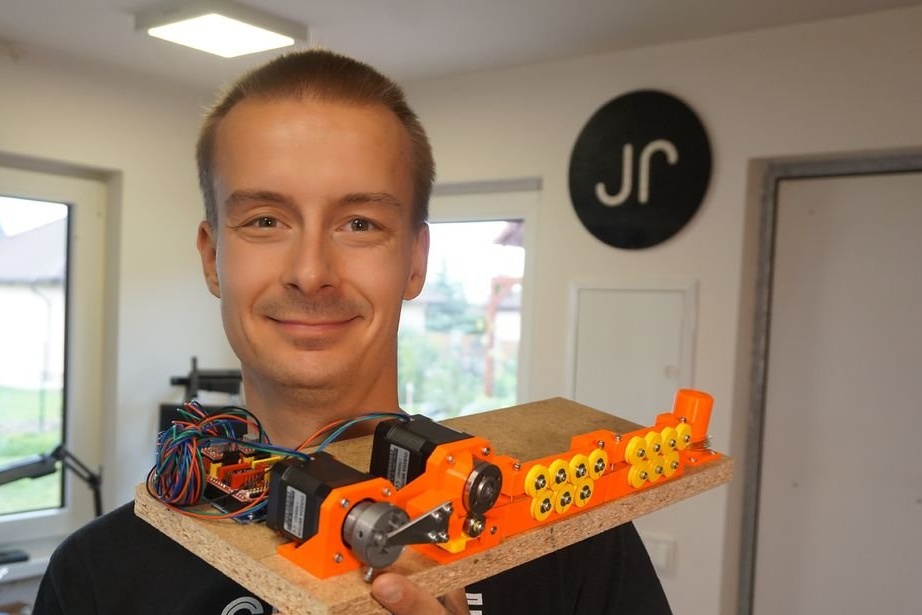
Mestari kekseli ja valmisti mielenkiintoisen laitteen, tämä on laite minkä tahansa muodon langan taivuttamiseksi. Jousien tekeminen on yksi sen ominaisuuksista. Tämä kone pystyy taivuttamaan 0,8 / 0,9 / 1 mm lankaa mihin tahansa 2D-muotoon.
Tämän koneen valmistuksen päätavoite oli automatisoida taivutusprosessi. Muut kotitekoiset koneet eivät ole kovin tarkkoja, ja niiden mutkilla on melko suuri säde.
Toinen tehtävä oli tehdä siitä mahdollisimman yksinkertainen käyttämällä yleisesti saatavilla olevia osia ja komponentteja. Jotkut koneen osat tulostetaan 3D-tulostimelle, ja metalliosia voi ostaa kaupasta.
Mikä on sellaisen koneen päällikkö? Hän on kiinnostunut valmistamaan LED-hahmoja, lumihiutaleita, tähtiä, kukkia jne. Niiden valmistuksessa tarvitaan identtisiä osia langasta, ja tämä kone helpottaa niiden valmistusta.
Katsotaanpa lyhyt video, jossa on esimerkki laitteesta.
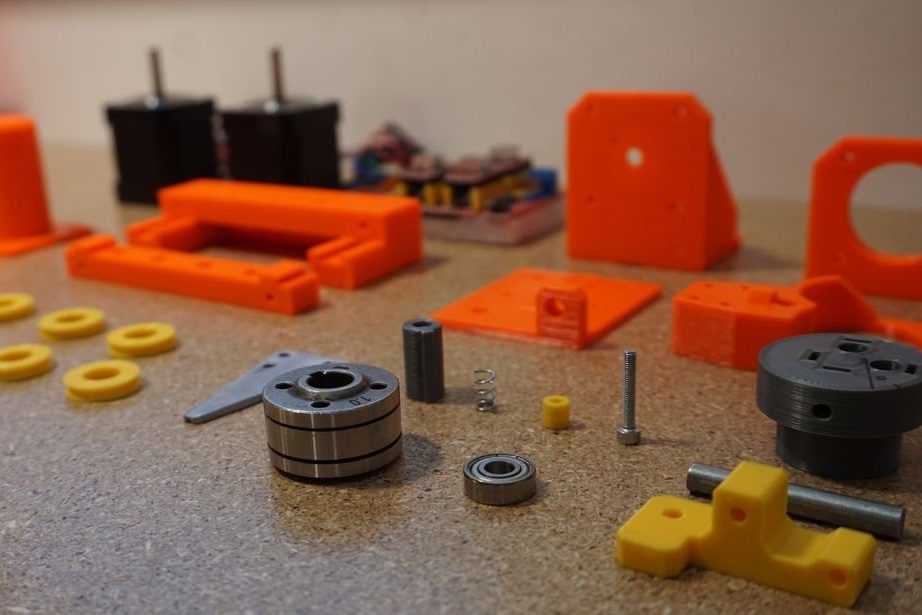
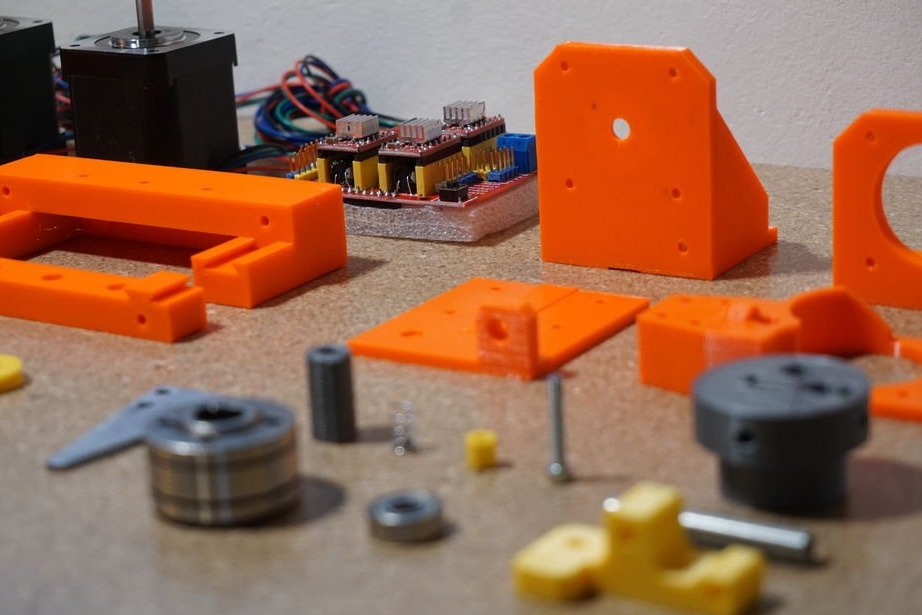
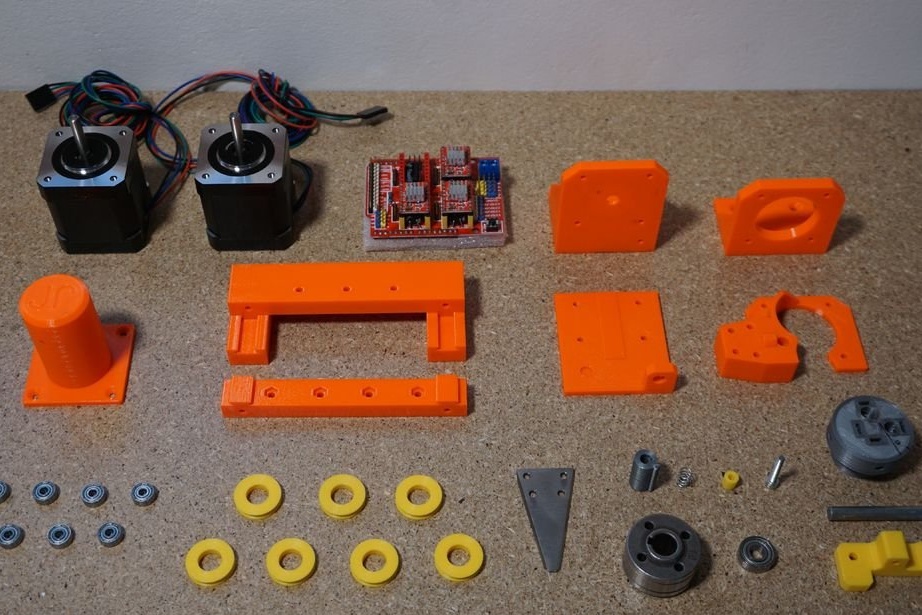
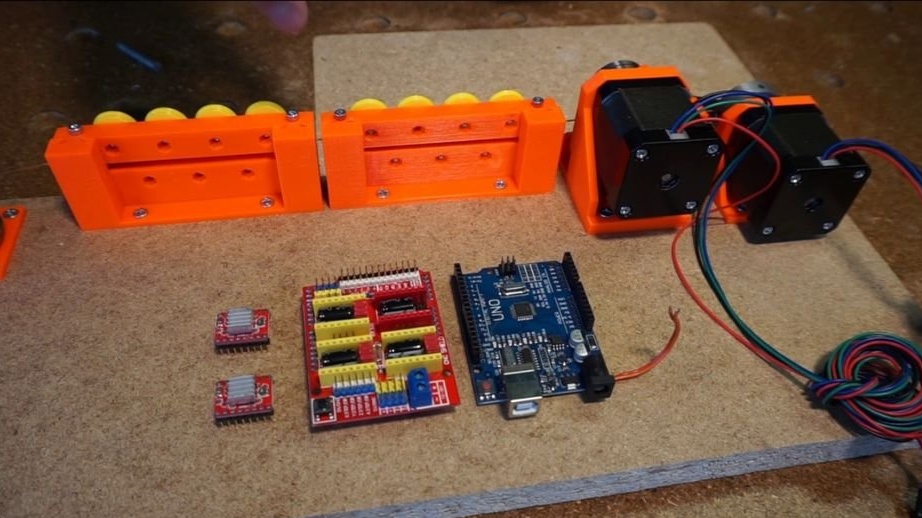
Joten tällaisen koneen valmistuksessa päällikkö käytti seuraavia
Työkalut ja materiaalit:
-3D yksityiskohdat (tulostustiedostot voidaan ladata täällä);
-Krepezh;
-Työläs UNO;
-Laajennuslevy Arduino UNO: lle;
-Vaiheohjain A4988 -2 kpl;
-Askelmoottori NEMA17 -2 kpl;
-12V 3A -virtalähde;
- langansyöttömekanismi;
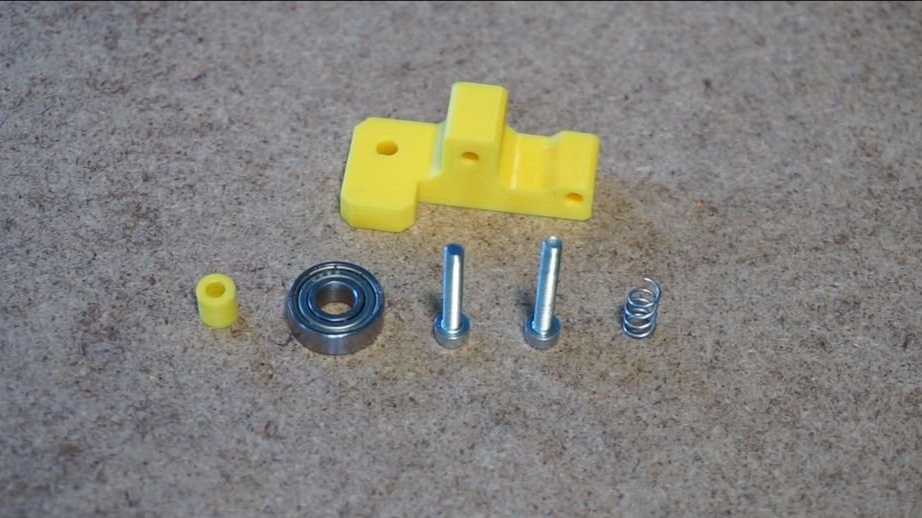
-Teräsjousi 4x6 mm;
- Laakeri 3x10x4 mm;
-Korkeus 6x15x4 mm;
-6 mm teräs sauva;
- 2 mm paksu teräslevy;
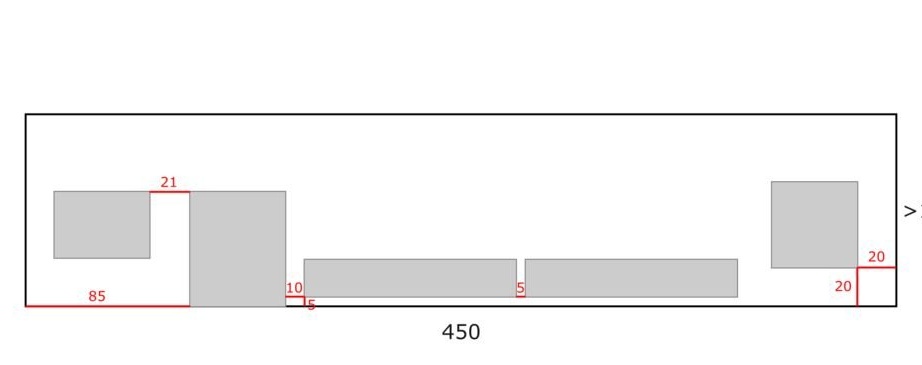
- Puulevy alustalle 450x100 mm;
- ruuvimeisseli;
gon;
Vaihe yksi: Kuinka se toimii
Katsotaanpa kuinka kone toimii (oikealta vasemmalle).
Puolauspidike - se pitää lankakelan koneen käsittelyä varten.
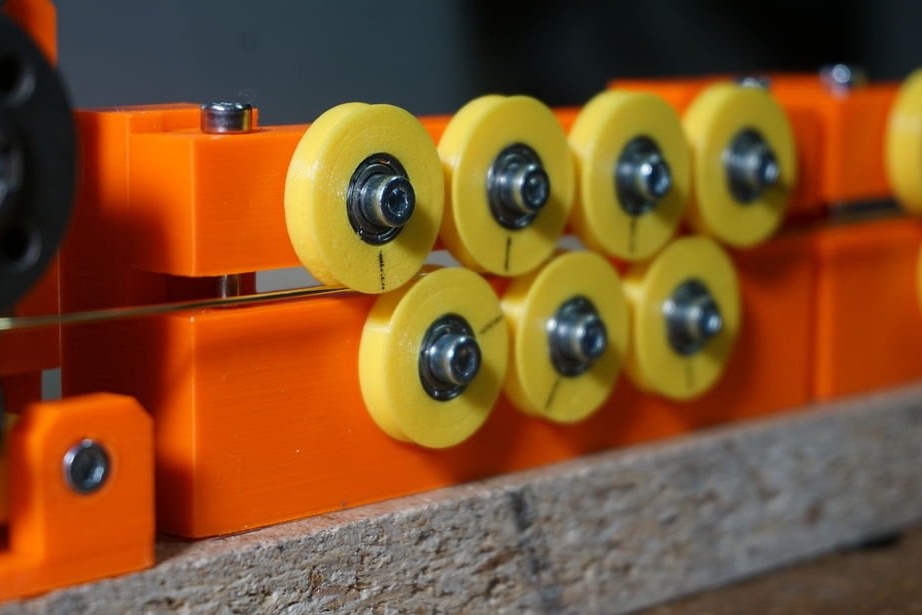
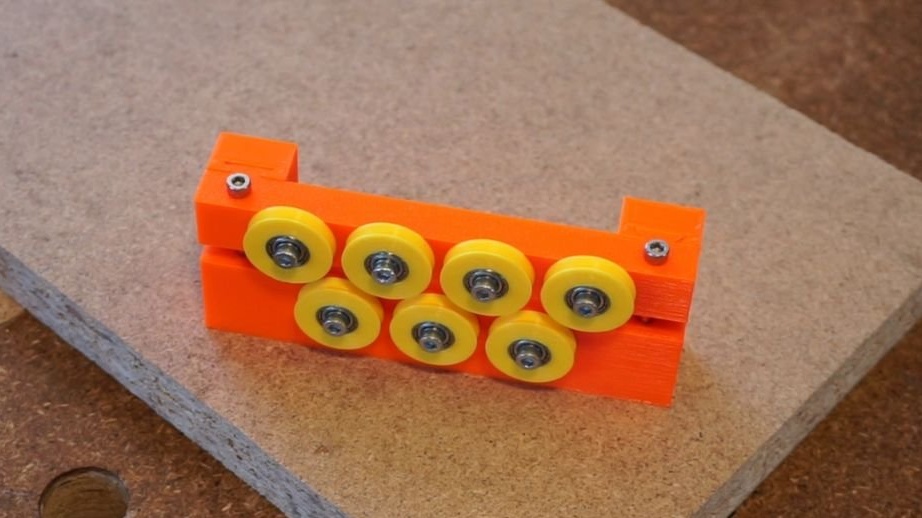
Tasasuuntaaja - sarja 7 rullaa, jotta lanka olisi mahdollisimman tasainen. Suorilla langoilla työskenteleminen on erittäin tärkeää. Siksi kaksi tasasuuntaajaa.
Broach - löydät samanlaisen mekanismin 3D-tulostimesta. Vaihteisto vetää langan kelalta telojen läpi ja työntää sen taivutuspäähän. Syöttömekanismissa on oltava riittävä langan paine, jotta se ei luista. Lisää tästä myöhemmin.
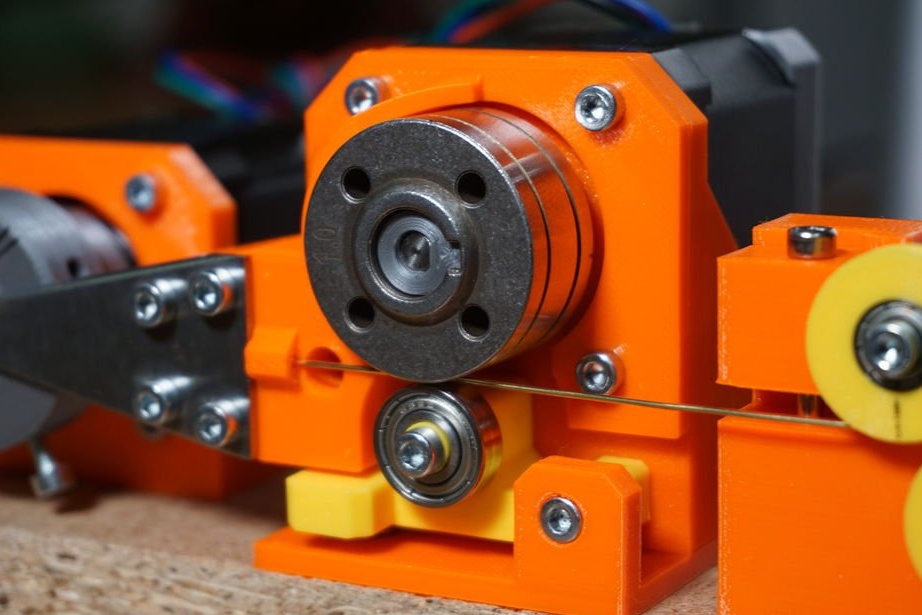
Taivutuskone - se taipuu langan ohjelmoituun muotoon.
Kaikkea tätä hallitsee yksi Arduino UN CNC-suojalla.Arduinolle lähetetään komento tietokoneelta ja se muuttaa ne komennoiksi askelmoottoreille.

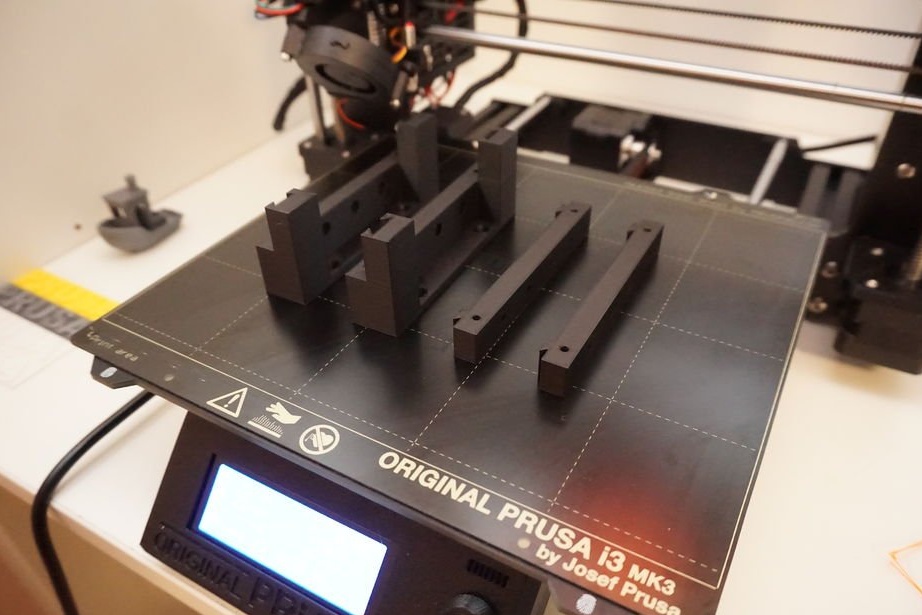
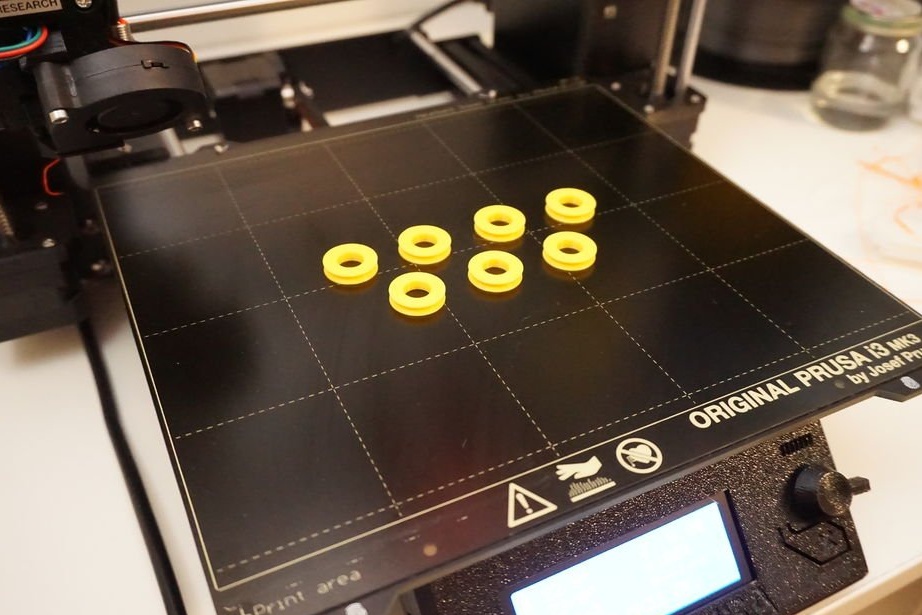
Vaihe toinen: Osien tulostaminen
Sinun on tulostettava seuraavat tiedot seuraavassa määrin (sekaannusten välttämiseksi alkuperäinen teksti):
taivutin
Työkalun pää
Moottorin runko
syöttölaite
Moottorin runko
Alakehys
Vaijeriohjain
Kuormapyörä
Kuormapyörän välikappale
Syöttölaitteiden välikappale
Taivutuslevy (malli)
Suoristusrullat (2x)
Sängyn runko (2x)
Ylävaihteiden runko (2x)
Rulla (14x)
Kelan pidike
Kerroksen korkeus tulostettaessa 0,15 mm. 40% täyttö. Tulostaminen vie 2 päivää.
Vaihe kolme: Taivutuskone
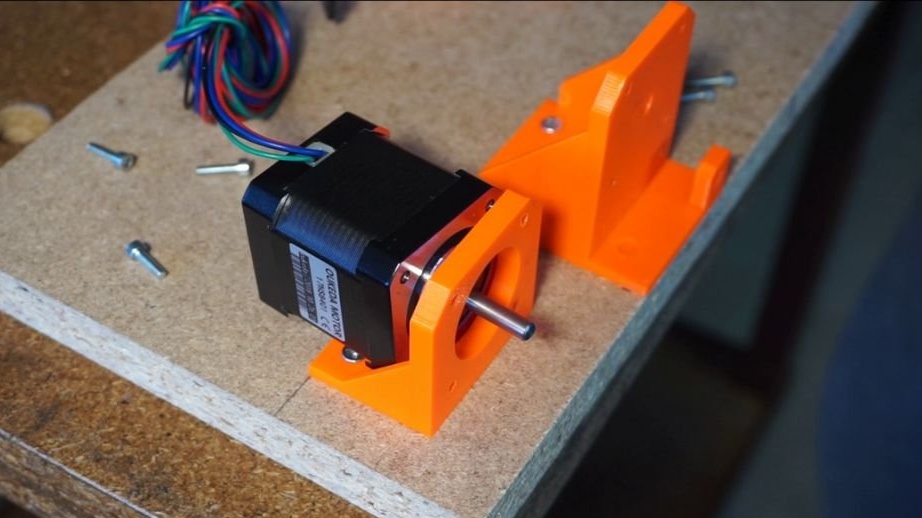
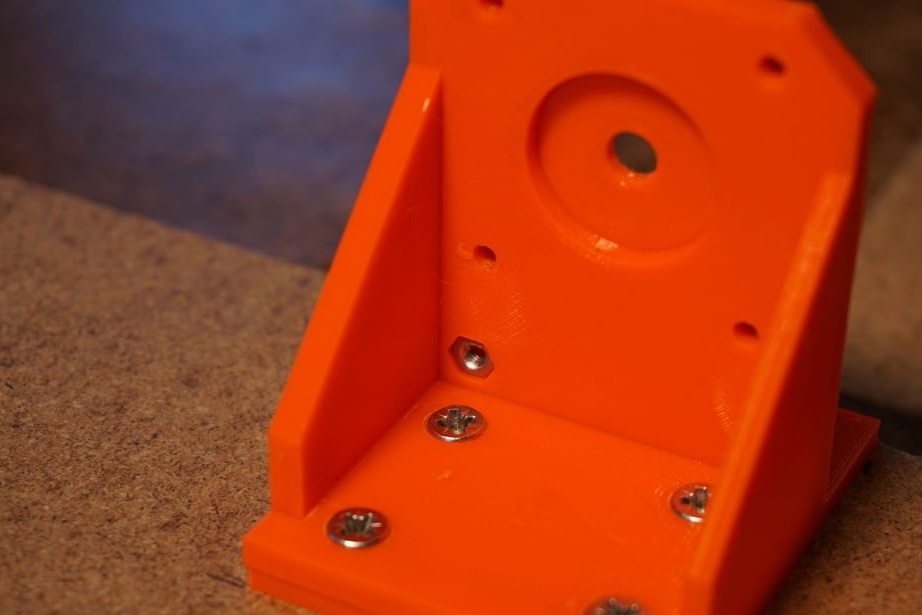
Isäntä ruuvaa kaksi kehystä pohjaan. On tärkeää asentaa molemmat kehykset kuvan osoittamalla tavalla.
Kiinnittää askelmoottorin runkoon. Kiinnittää pää moottorin akseliin.


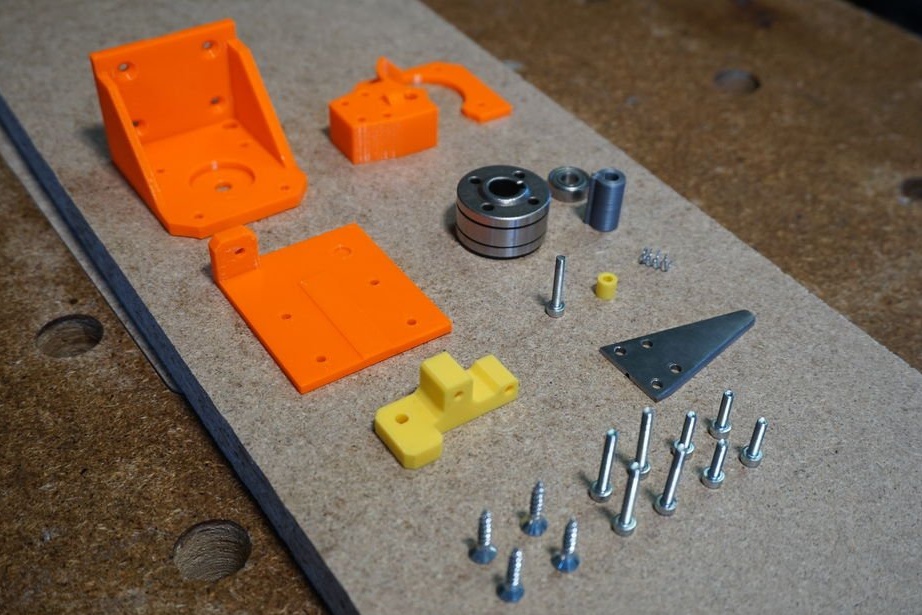
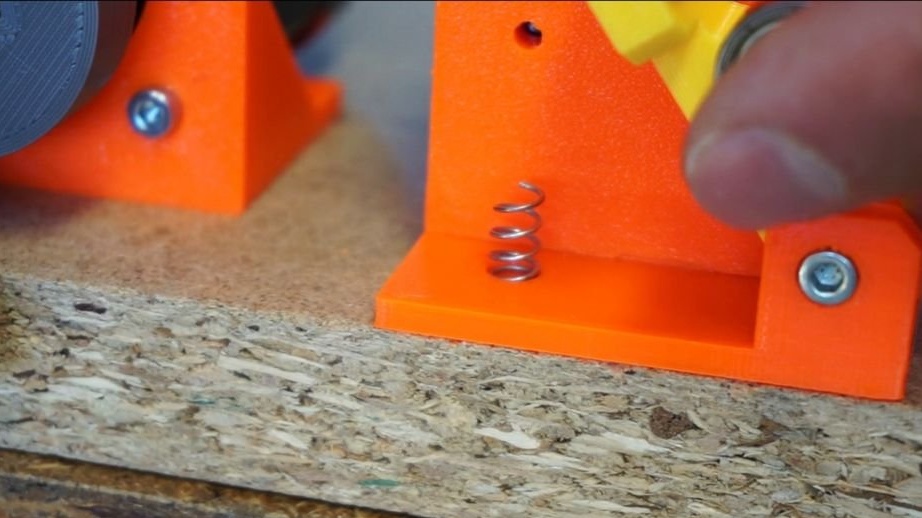
Vaihe neljä: Esite
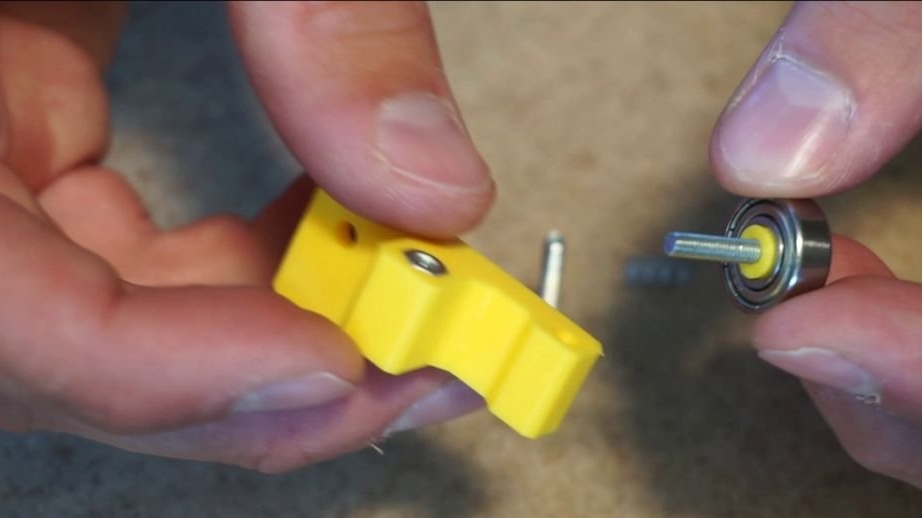
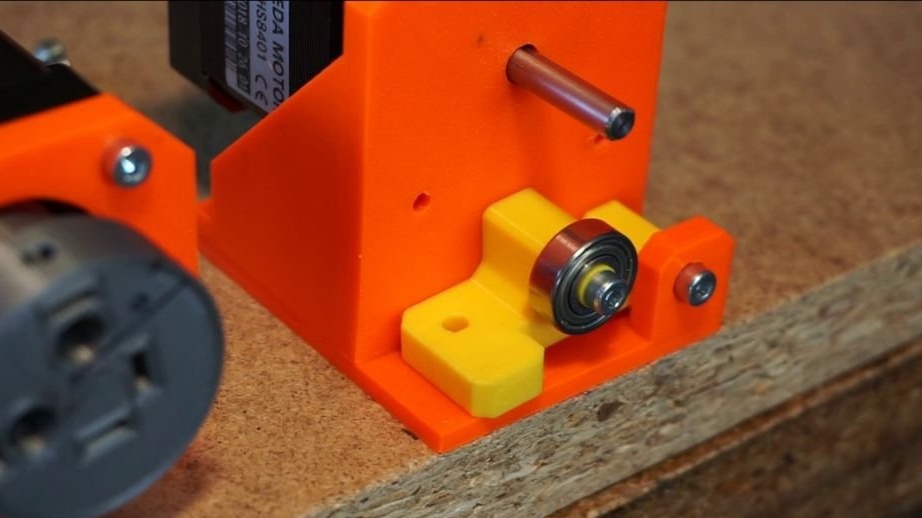
Runko on jo asennettu, joten ensimmäinen askel syöttömekanismin luomisessa on rakentaa vaunu välituotteelle, joka painaa vaijerin syöttömekanismiin. Poista muovitiiviste 6x15x4 mm: n laakerin sisällä. Asenna laakeri M3x20-pulttiin. Asenna M3-mutteri vaunuun ja ruuvaa laakeri pulttiin. Varmista, että laakeri pyörii vapaasti. Aseta toinen M3-mutteri moottorin runkoon (moottorin puoli vasemmassa alakulmassa) ja ruuvaa vaunu pienen kiinnikkeen läpi M3x20-pultilla. Älä kiristä pulttia liikaa, vaunun on liikuttava vapaasti. Nosta vaunu ja aseta jousi sen alla olevaan reikään.
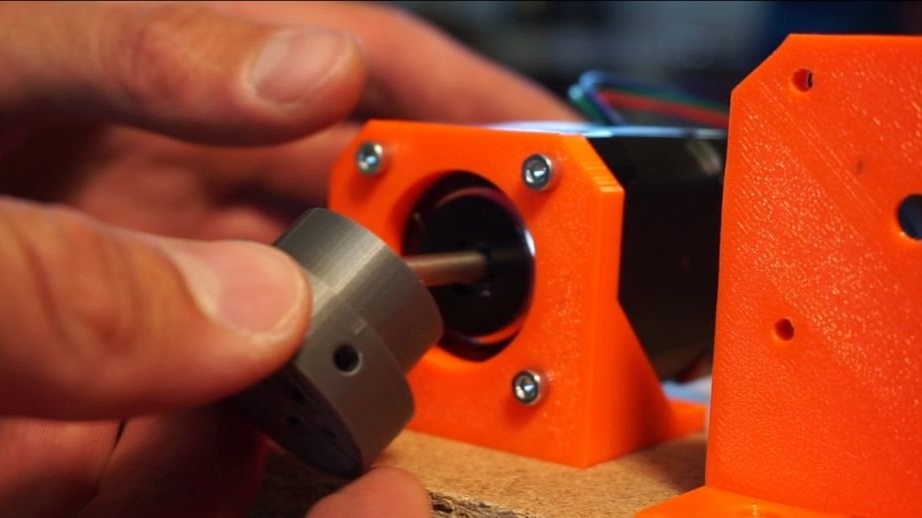
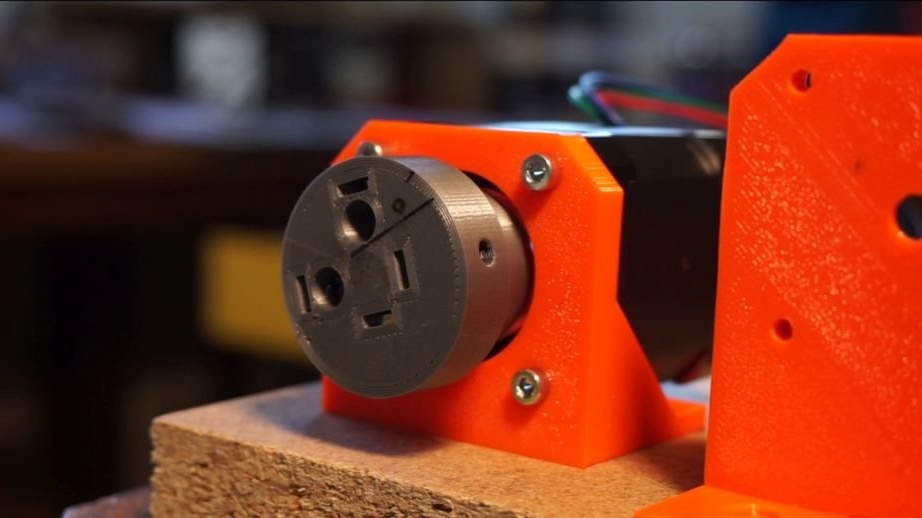
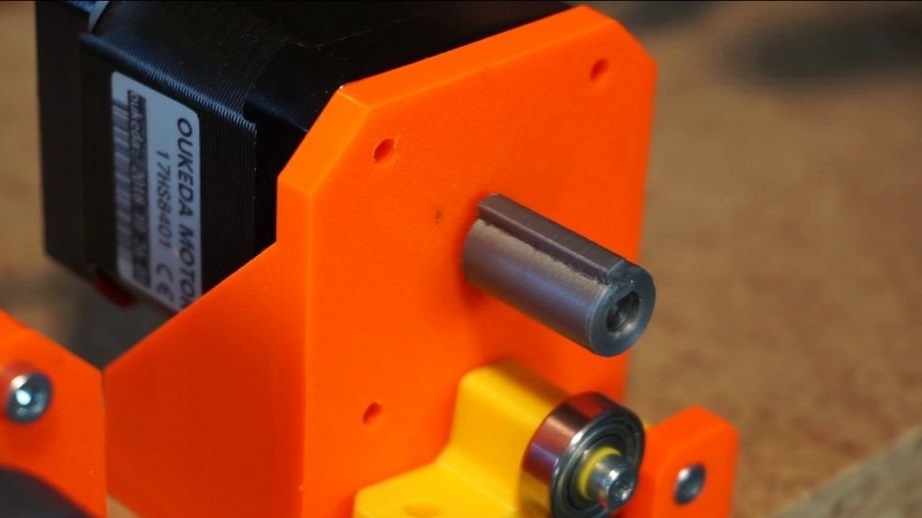
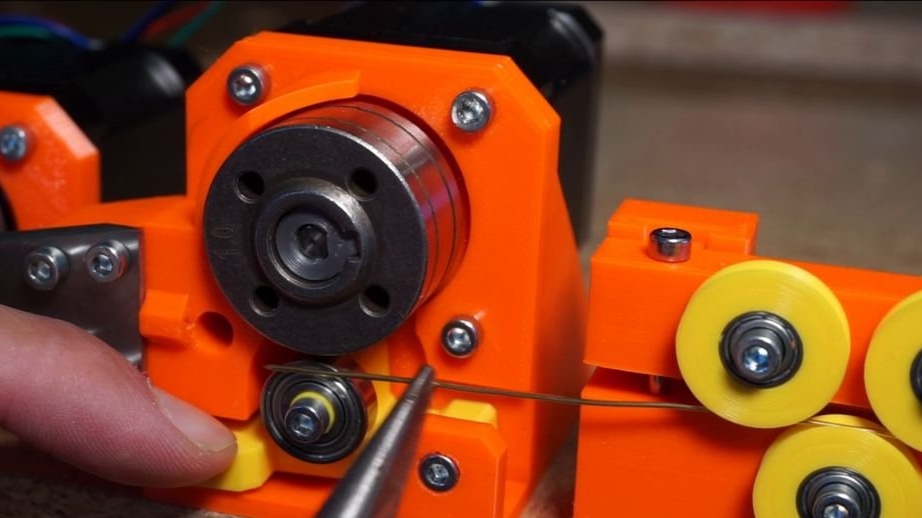
Ota toinen askelmoottori ja asenna se moottorin runkoon. Älä ruuvaa vielä. Paina syöttömekanismin välike moottorin akselille ja asenna syöttömekanismi.
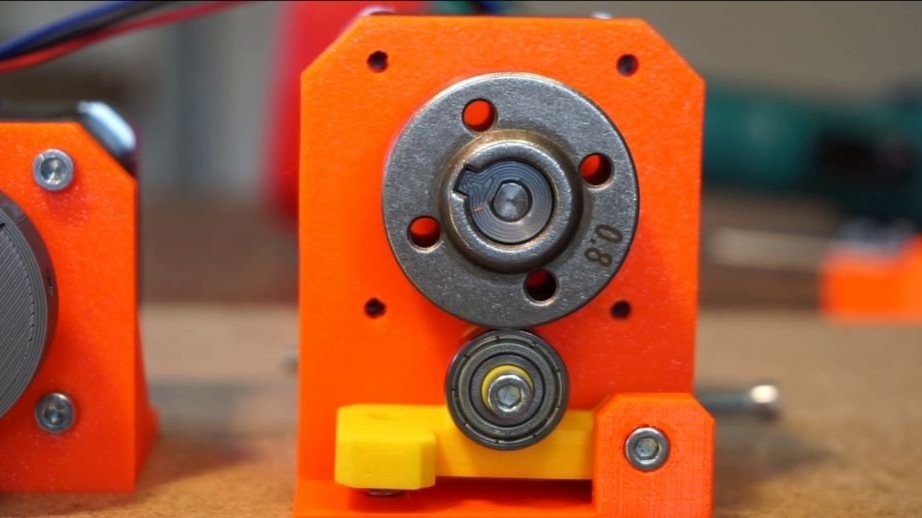
Syöttömekanismi, jota isäntä käyttää, on otettu MIG-hitsauskoneesta. Mekanismissa on kaksi syvennystä kelassa. Yksi 0,8 mm lanka ja yksi 1 mm lanka. Toisin kuin hammaspyörät (aikaisemmin isäntä yritti syöttää lankaa niiden kanssa), tämä mekanismi ei jätä jälkiä lankaan.
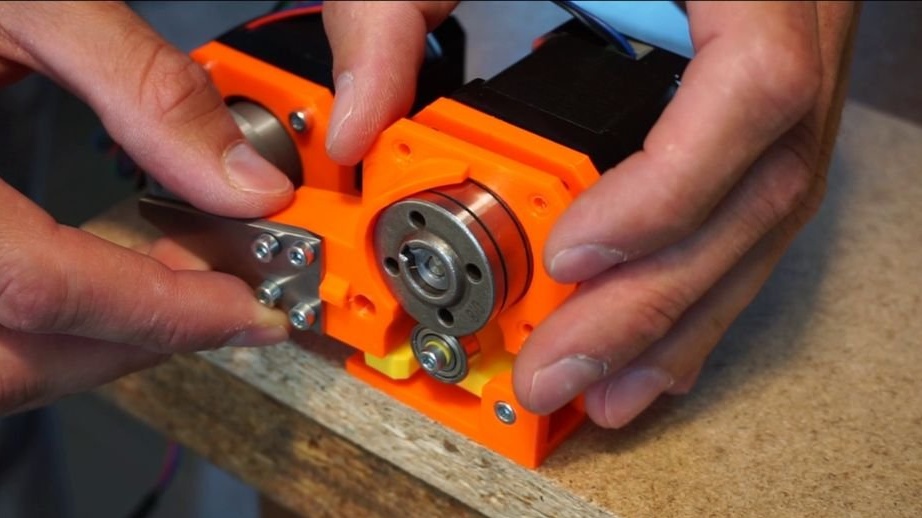
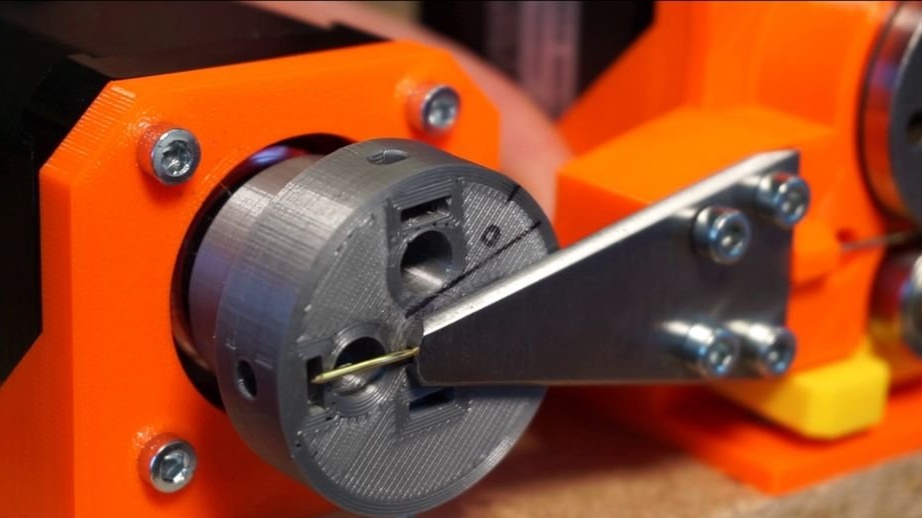
Syöttölaite ja taivutuslaite yhdistetään taivutuslevyllä - 2 mm paksuisella metallilevyllä, jonka takaseinällä on pieni ura, joka syöttää vaijerin suoraan taivutuspään keskikohtaan täydellisen taivutuksen aikaansaamiseksi. Tulostamista varten on muoviset taivutuslevyt, jotka toimivat hyvin, mutta kuluvat nopeasti ja vaativat usein vaihtoa. Voit käyttää sitä tai tehdä siitä metallilevyn.
Seuraavaksi ota lankaohjaimen muoviosa ja asenna neljä M3-mutteria sen takana oleviin reikiin. Ruuvaa nyt taivutuslevy M3x20-pulteilla. Aseta vaijeriohjain syöttömekanismin moottorin rungon eteen ja kiinnitä se moottoriin neljällä M3x12-ruuvilla. Säädä taivutuslevyn sijainti. Sen tulisi olla tarkalleen taivutuspään keskellä.
Esite on valmis. Jos sinulla on suora lanka, voit käyttää johtoa nyt. Muuten tarvitset tasasuuntaajan.





Vaihe viisi: Esite
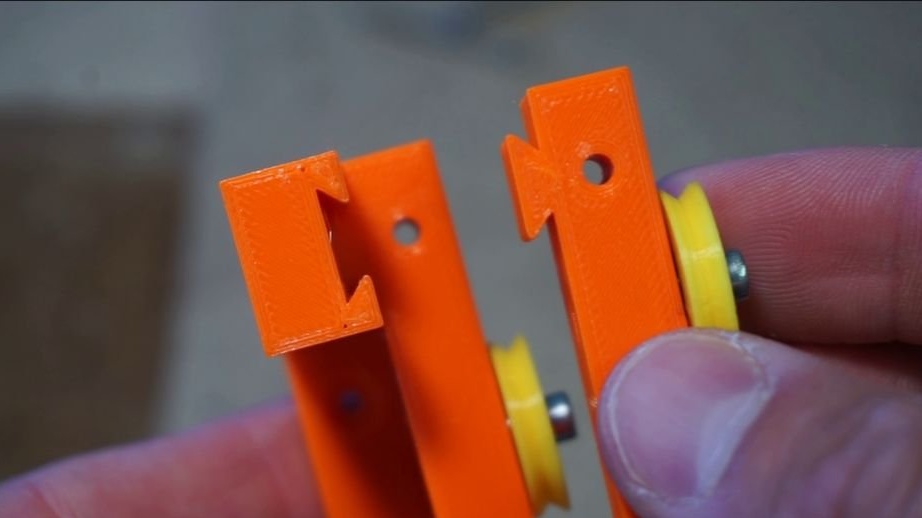
Lanka toimitetaan yleensä kelan muodossa. Lanka taivuttaaksesi sinun on ensin suoristettava se. Tasasuuntaaja koostuu 7 telasta (4 yläosassa ja 3 alaosassa), jotka voidaan puristaa toisiaan vasten varmistaaksesi langan oikean kireyden. Se estää myös vaijerin kiertymisen taivutuksen aikana.
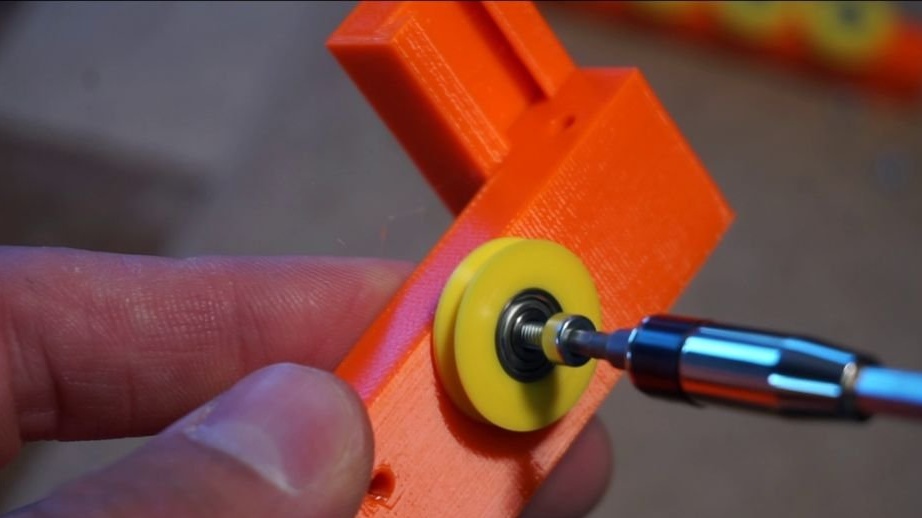
Aloita kokoonpano rullapyörillä. Ensin sinun täytyy painaa laakeri 3x10x4 mm muovirullakoteloon. Aseta M3x12-pultti toiselle puolelle ja M3-aluslevy rullan toiselle puolelle. Aluslevy estää pyörän kitkaa rungossa. Ruuvaa kaikki rullat ala- ja yläkehykseen. Yhdistä molemmat kehykset. Kiinnitä kehykset kahdella M3x40-ruuvilla.
Voit säästää rahaa rullalaakereilla. Tulosta Suoristusosa_RollerNoBearing-osa Suoristaja_Rollerin sijaan. Mutta suorituskyky on hiukan huonompi.
Saat vielä parempia tuloksia käyttämällä 2 suoristajaa peräkkäin.




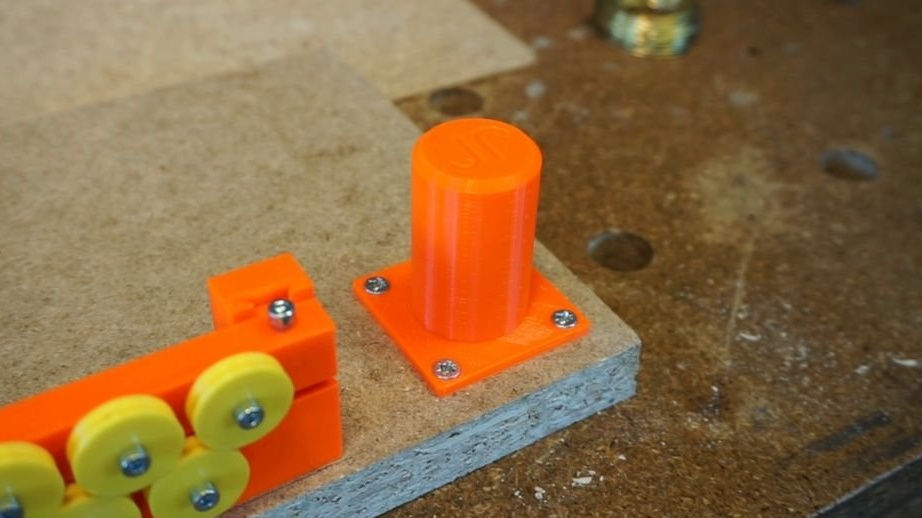
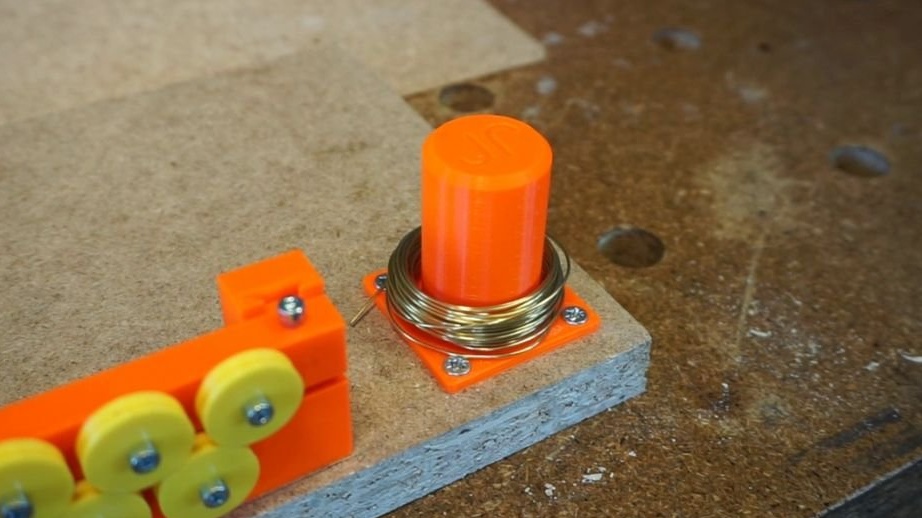
Vaihe kuusi: Kelan pidin
Puolan pidike on yksinkertainen sylinteri, joka pitää lankaa ja antaa sen kelautua kelaan. Ruuvaa se pohjaan neljällä 3x16 ruuvilla.
Vaihe seitsemän: yhdistä
Ensin taivutuslanka on syötettävä koneelle. Mestari käyttää 0,8-1mm messinkilankaa kelan muodossa.
Lanka menee kelalta telojen läpi. Kiinnitä johdin vain telojen väliin. Sitten hän käy läpi esitteen.Säädä syöttömekanismin sijainti siten, että kouru on tasossa lankaohjaimen pinnan kanssa. Paina välivaihteen vipu ja työnnä vaijeri syöttölaitteen läpi taivutuslevyyn. Vapauta vipu ja anna sen painaa syöttömekanismia vasten. Voit nyt vierittää syöttömekanismia manuaalisesti työntääksesi langan taivutuspäähän. Säädä telojen kireys varovasti kiristämällä pultit. Telojen ei tulisi pyöriä vapaasti, mutta vaijerin tulisi liikkua tasaisesti.
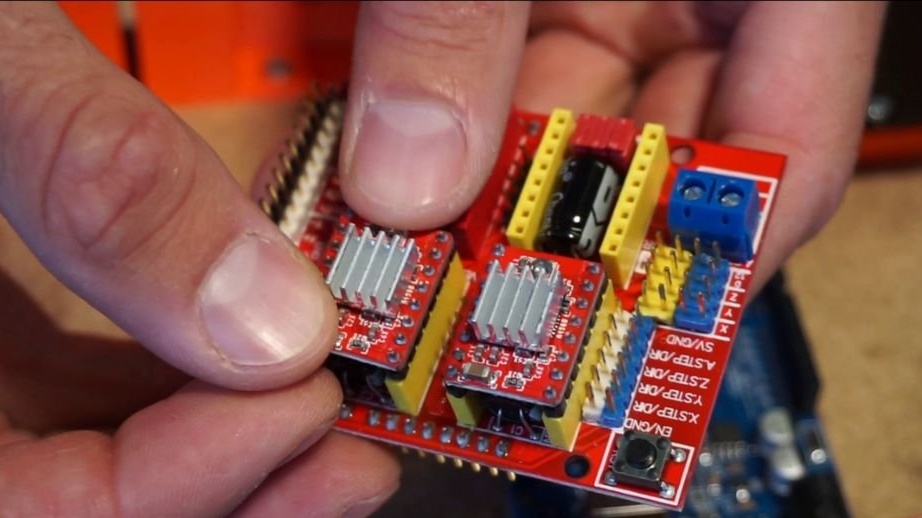
Toiseksi elektroniikka Säädin on myös kytkettävä. Mestari käyttää klassista Arduino UNO: ta CNC: n ja kahden A4988-askelmoottoriohjaimen kanssa. Syöttömoottori on kytketty Z-akseliin ja taivutuspäämoottori X-akseliin.Ajurit on konfiguroitu parhaan mahdollisen tarkkuuden saavuttamiseksi - kaikki 3 askelohjaimen alla olevaa hyppääjää asetetaan paikoilleen. Kaikkien tulee olla kytketty 12 V: n 3A: n virtalähteeseen.

Kahdeksas vaihe: Laiteohjelmisto
Nyt voit yrittää käynnistää koneen. Mestari käyttää GRBL yhdessä cncjs. Ne on suunniteltu toimimaan jyrsinkoneessa, mutta toimivat hyvin kaikenlaisissa CNC-tyypeissä. GRBL on firmware, joka sinun on asennettava Arduino UNO: han. Parametrien asettamiseen on hyvä cncjs-web-asiakas. Asenna GRBL Arduinoon ja cncjs: iin tietokoneellesi.
Asennuksen jälkeen sinun on muodostettava yhteys laitteeseen ja tarkistettava sen toiminta painikkeilla Z +/- tai X +/-.
Nyt sinun on kalibroitava: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Tämä on joukko arvoja, jotka määrittelevät kuinka muuntaa koodissa ilmoitettu luku moottorin liikkeeksi. Jos esimerkiksi asetat Z-akselin arvoon 30, se tarkoittaa todella, että hän työntää 30 mm lankaa syöttölaitteen läpi.
Selvytimme kalibroinnin, nyt sinun on asetettava taivutuspää nolla-asentoon.
Taivutuspään liikkeen määrää taivutuspään tunnettu kiinteä sijainti. Tässä tapauksessa tämä on sijainti, jossa pään taivuttamistappi osoittaa vasemmalle. Katso kuva.
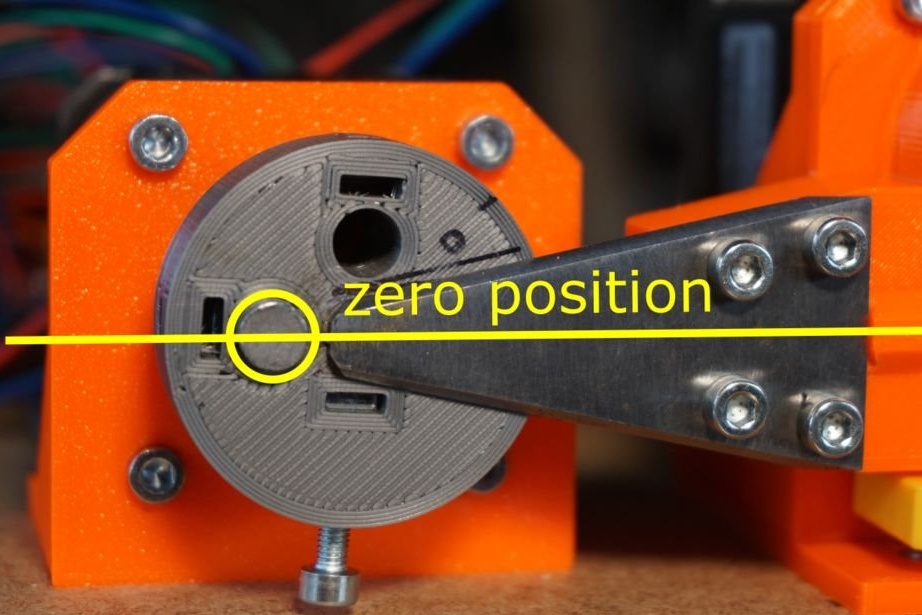
On suositeltavaa merkitä tämä nolla-asento päähän, jotta se voisi palata samaan asentoon. Syöttömekanismilla ei tarvitse määrittää nolla-asemaa, koska se liikkuu aina suhteessa nykyiseen sijaintiin.
Katsotaanpa nyt Gcode-esimerkkiä. Se näyttää tältä:
G91
G1 Z1
G90
G1 X2
G1 X-6Ja tässä on mikä kukin arvo on kirjoitettu:
G91 - käytä suhteellisia koordinaatteja (vaaditaan ennen liikettä Z-akselilla)
G1 Z1 - syötä 1 mm lanka
G90 - käytä absoluuttisia koordinaatteja (vaaditaan ennen liikettä X-akselilla)
G1 X2 - käännä taivutuspää asentoon 2 (tällä numerolla ei ole yksiköitä)
G1 X-6 - käännä taivutuspää asentoon -6
Jos toistat vaiheet 100 kertaa, saat jousen taipumiskoodin. Lisää lähdetiedostoja löytyy alla.
heks-inner.gcode
heks-outer.gcode
spring.gcode
Kone on valmis. Mutta mestari pyrkii edelleen parantamaan sitä.
Koko tällaisen koneen valmistusprosessi näkyy videossa.