
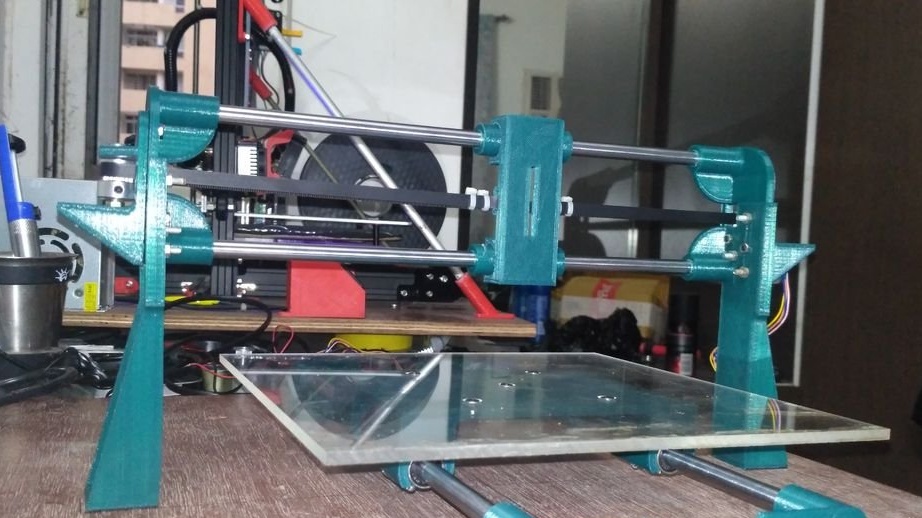
Kun etsit aliexpressin laser kaivertajia, päällikkö tapasi useita USB-käyttöisiä malleja. Oli hämmästyttävää, että he pystyivät kaiverremaan erilaisia materiaaleja sekä leikkaamaan muotoja ja kuvioita tarroista ja paperista ja tekemään kaiken tämän virran 5 V USB: ltä. Mutta näiden kaivertajien haittana oli, että niiden työalue oli pieni, useimmiten vain 40 mm x 40 mm.
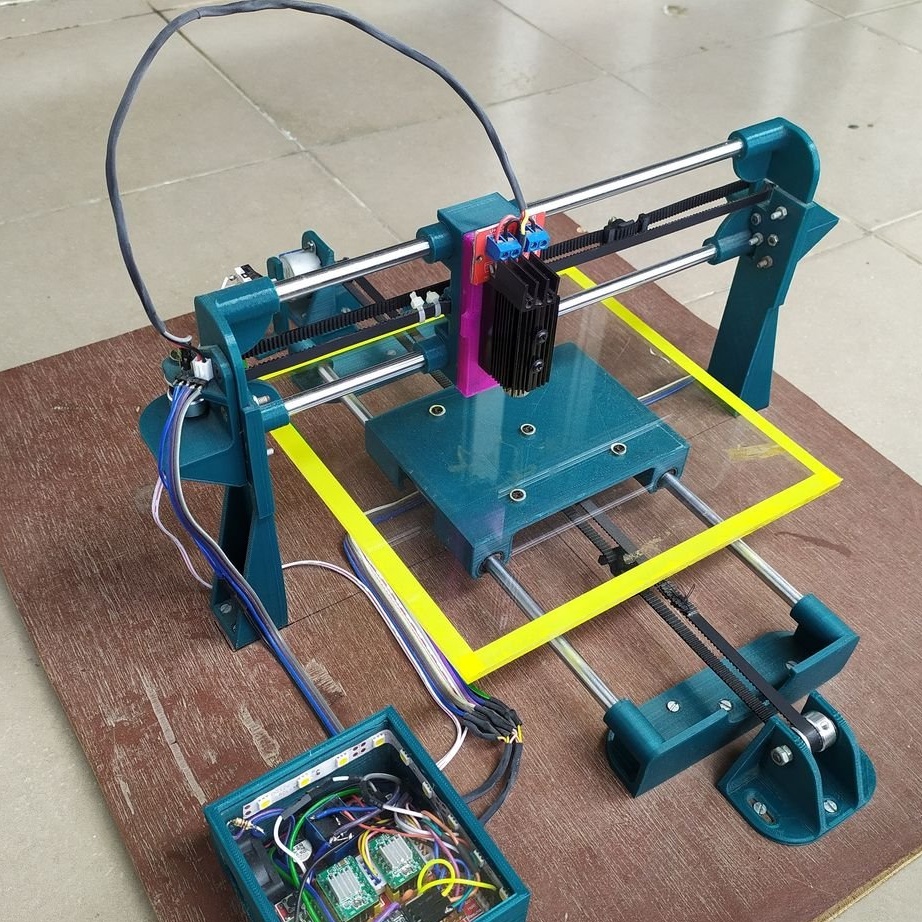
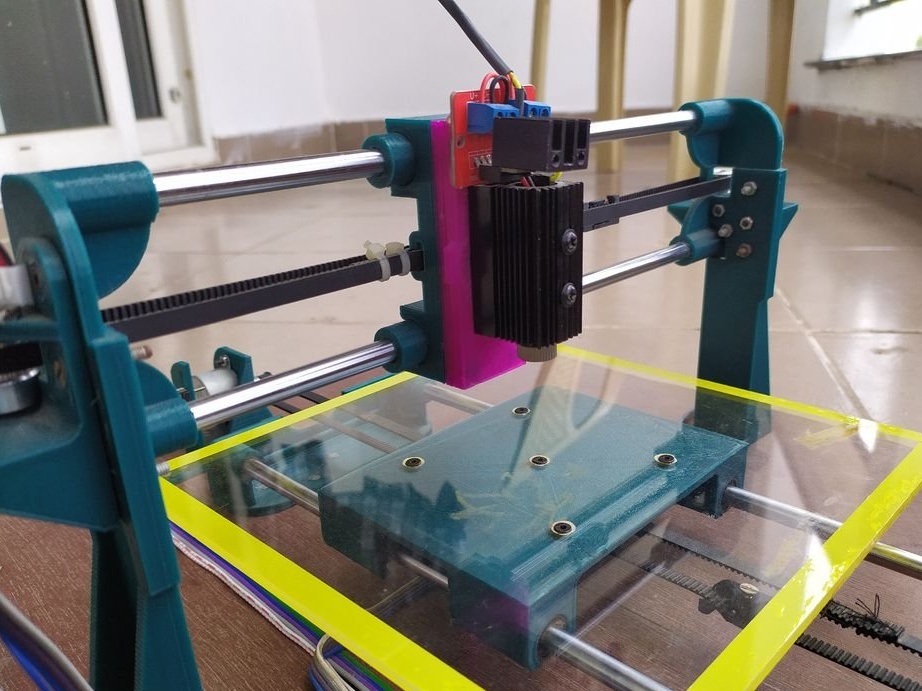
Sitten mestari päätti suunnitella ja valmistaa itsenäisesti kaivertajan käyttämällä 3D-tulostinta valmistukseen. Matkan varrella hän päätti tehdä laserpidikkeen modulaariseksi, jotta laser voidaan helposti korvata kynällä tai merkinnällä. Myös Bluetooth-yhteystoiminto on lisätty.
Kaivertajan tekniset tiedot ovat seuraavat:
- Työalue 200 x 162 mm
-1000 mw lasermoduuli
-Työ USB-virtalähteestä (5V)
-Auto-ohjaustoiminto
- Bluetooth-tiedonsiirto laser kaivertajan ja PC: n välillä
- PWM-laserohjaus. (Auttaa luomaan erilaisia mustasävyjä muotokuvien kaiverruksessa)
-102,4 askelta per resoluutio mm
- Kone voi kaivertaa, leikata ja piirtää eri materiaaleille

Työkalut ja materiaalit:
-Arduino UNO;
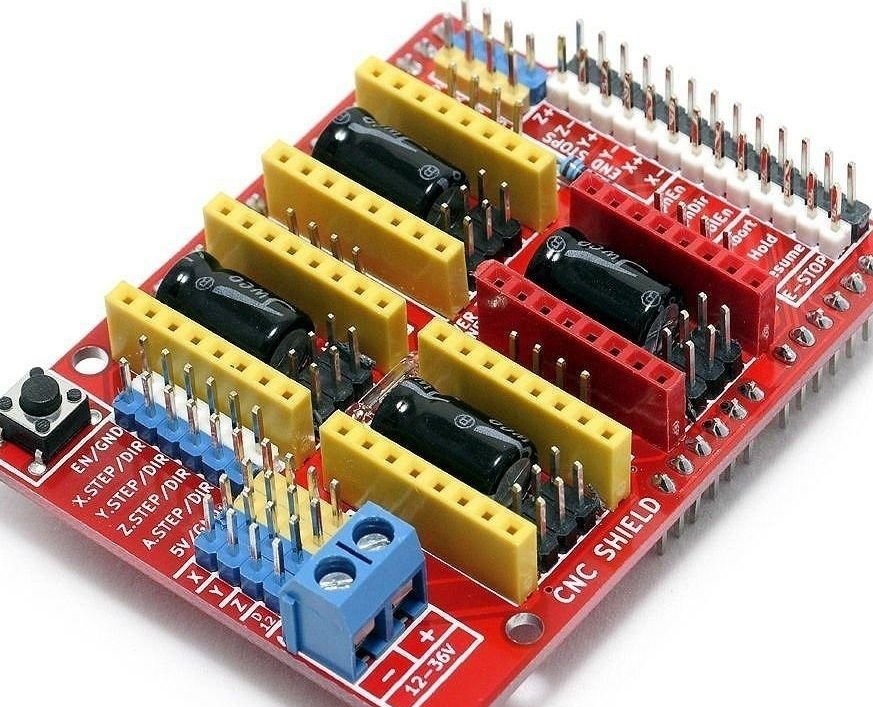
-Laajennus;
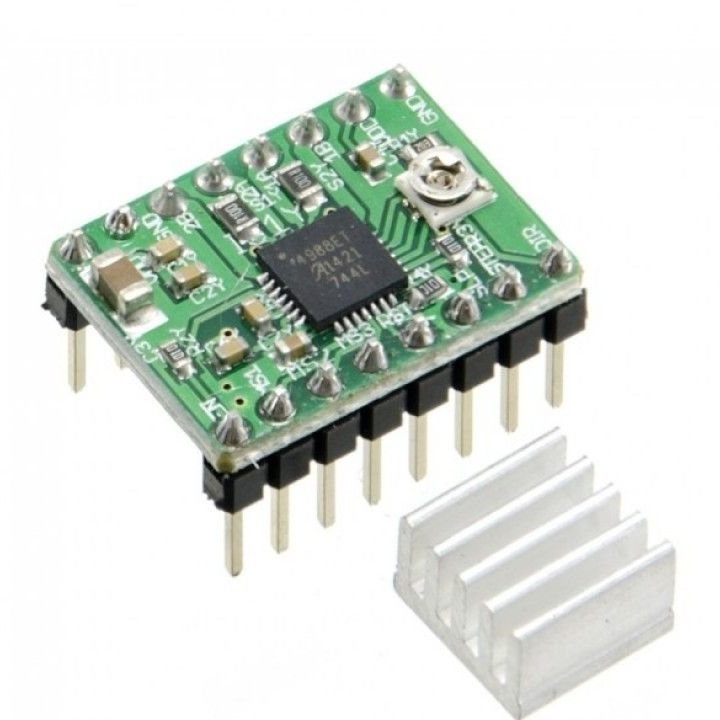
- A4988 askelmoottoriohjain - 2 kpl;
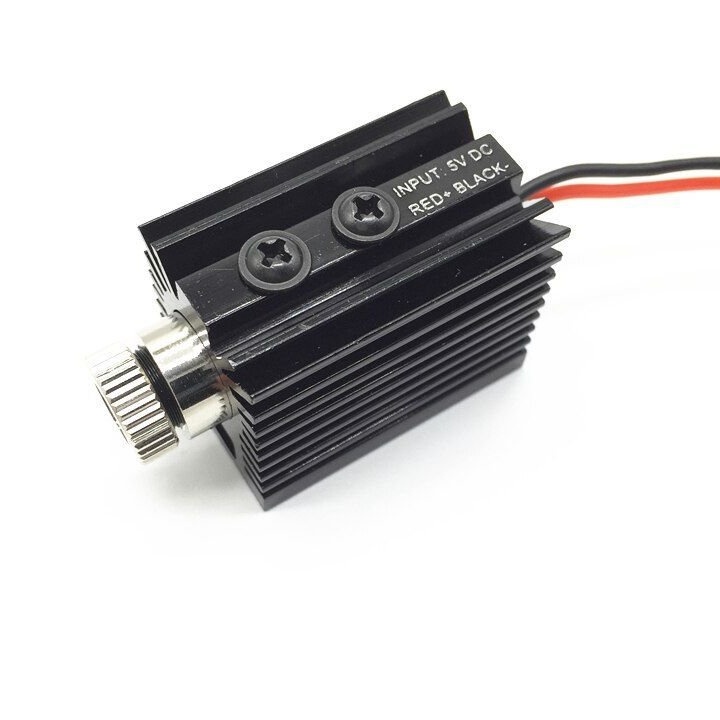
-1000 mW lasermoduuli;
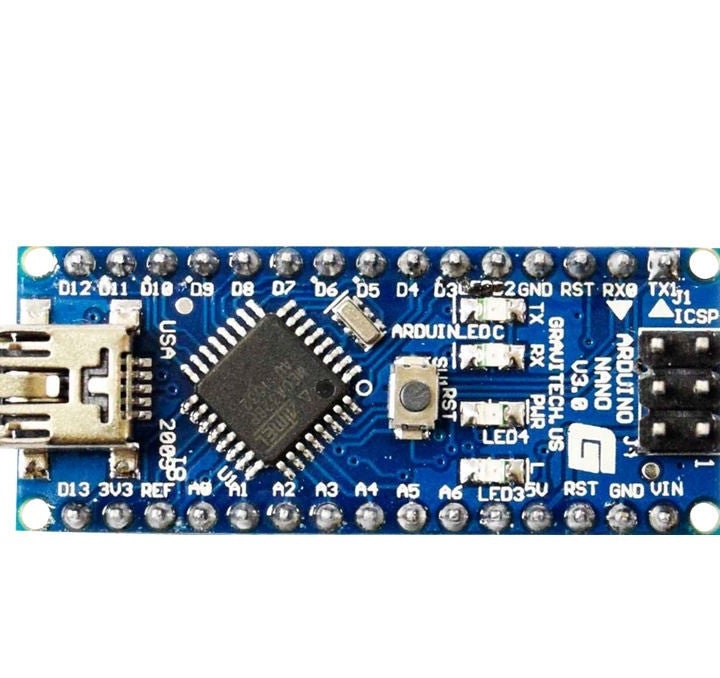
- Arduino Nano;
- XL6009 Boost Converter;
- LM8UU lineaariset kuulalaakerit - 6 kpl;
Hihnapyörä - 4 kpl;
- Tankojen halkaisija 8 mm, pituus 300 mm - 4 kpl;
-moduuli IRF520 Mosfet;
- rele;
- Rajakytkimet - 2 kpl;
-Step-moottorit 2 kpl;
- Neodyymimagneetit 18 x 5 mm x 3 mm;
-30 * 30 mm 5 voltin jäähdytyspuhallin;
-Remen;
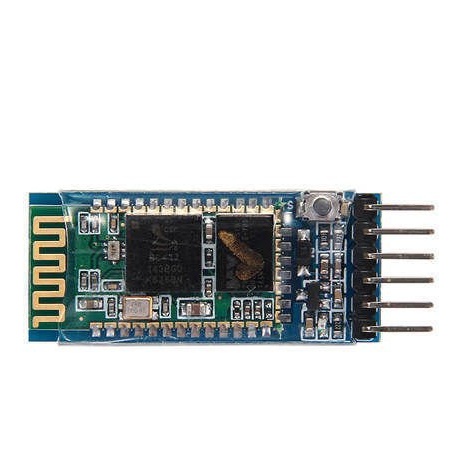
-HC-05 Bluetooth-moduuli;
-SG90-servomoottori;
Ruuviliittimet
-Puristusputki;
- Superglue;
-Kaapelisidokset;
-Krepezh
M3 30 mm
M3 12mm pultit
M4 40 mm
M3-pähkinät
M4 pähkinät;
- vaneri 8mm 48 x 42 cm;
-5 mm läpinäkyvä akryylilevy 22 x 22 cm;
- MicroUSB-kaapeli;
-Jätepaperi;
-Nadfil;
- ruuvimeisseli;
-Juotto tarvikkeet;
- Pihdit;
- sakset;
-Kusachki;
-Tietokone ohjelmistolla;











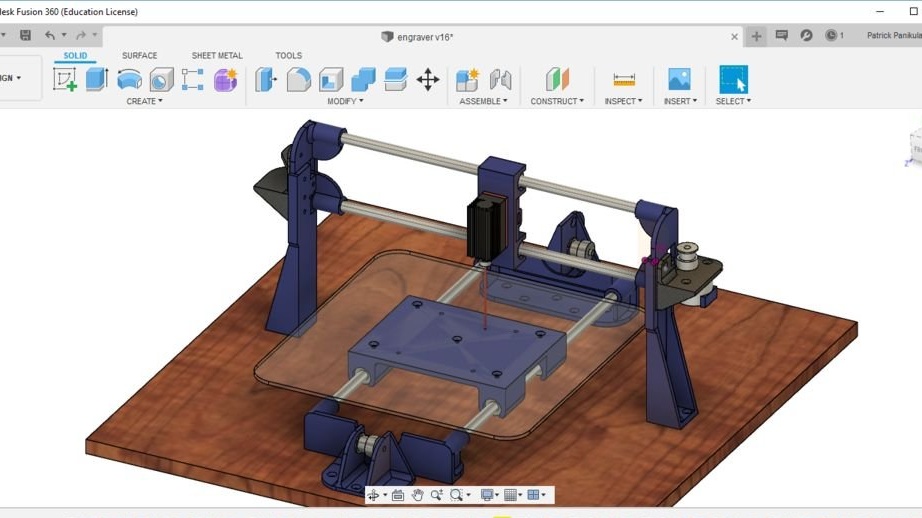
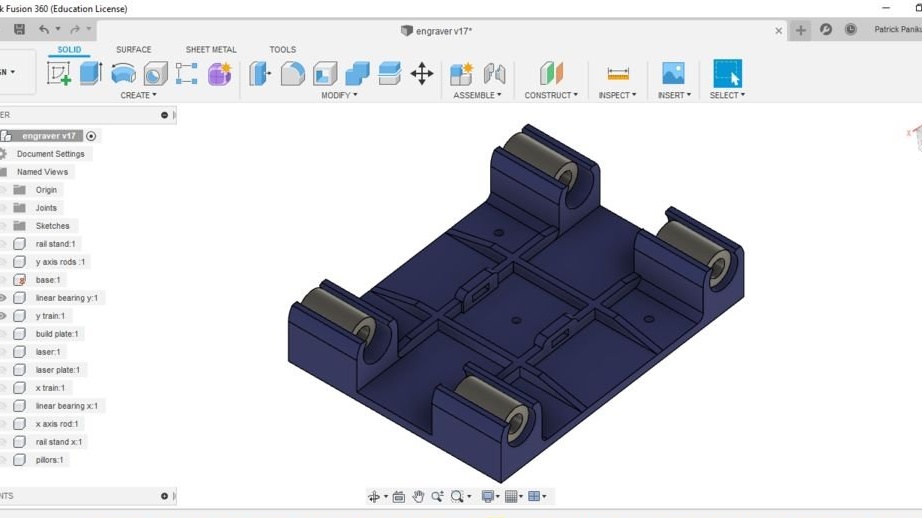
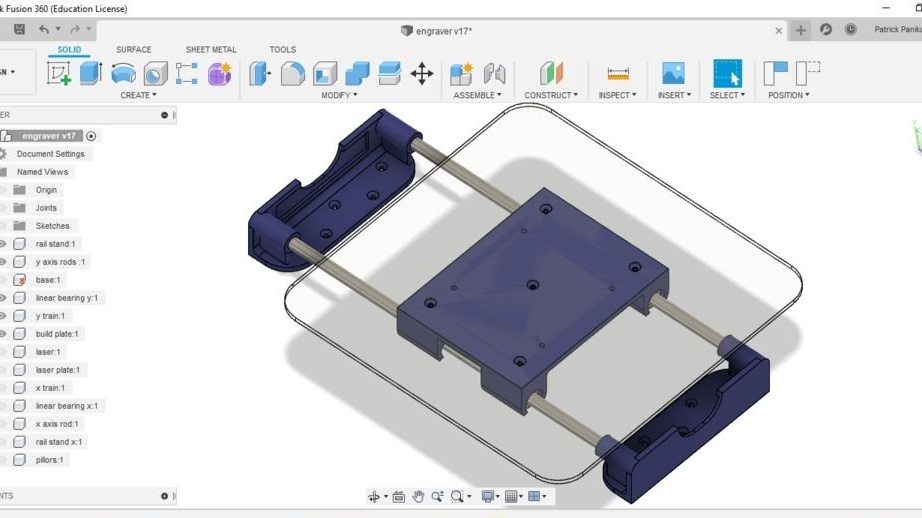
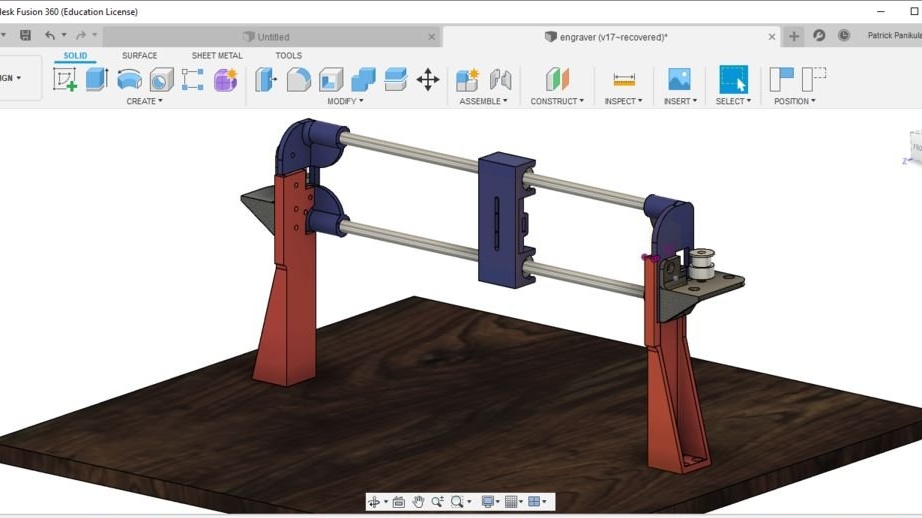
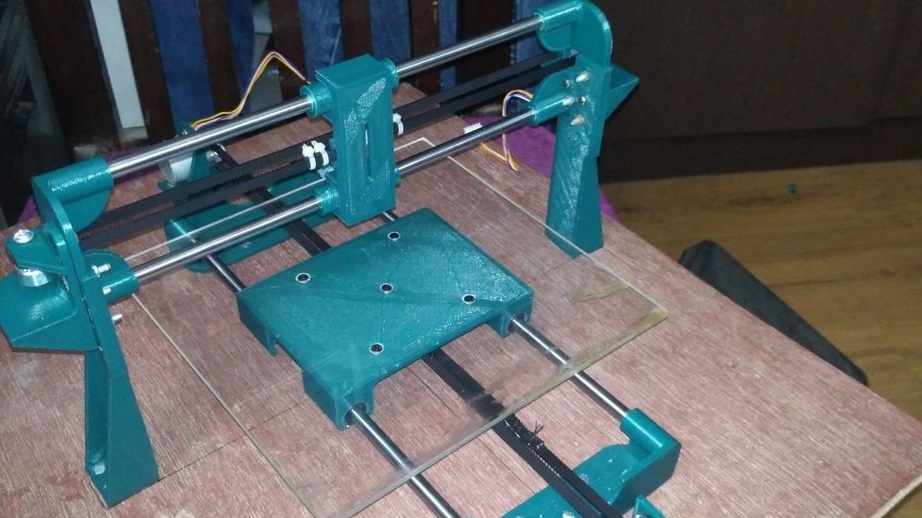
Vaihe yksi: Suunnittelu
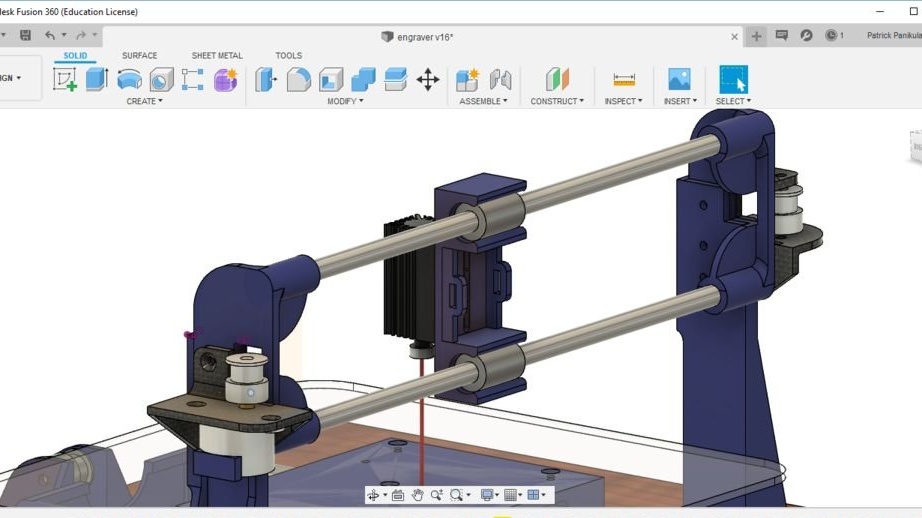
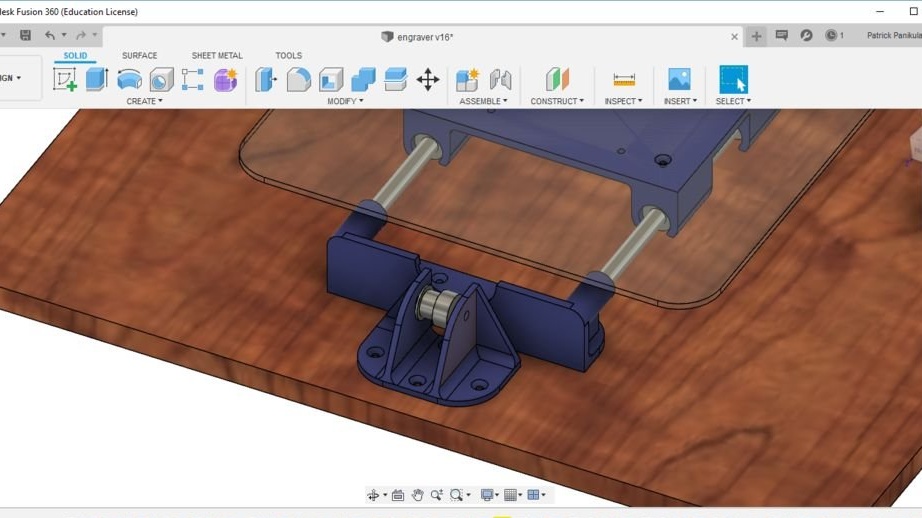
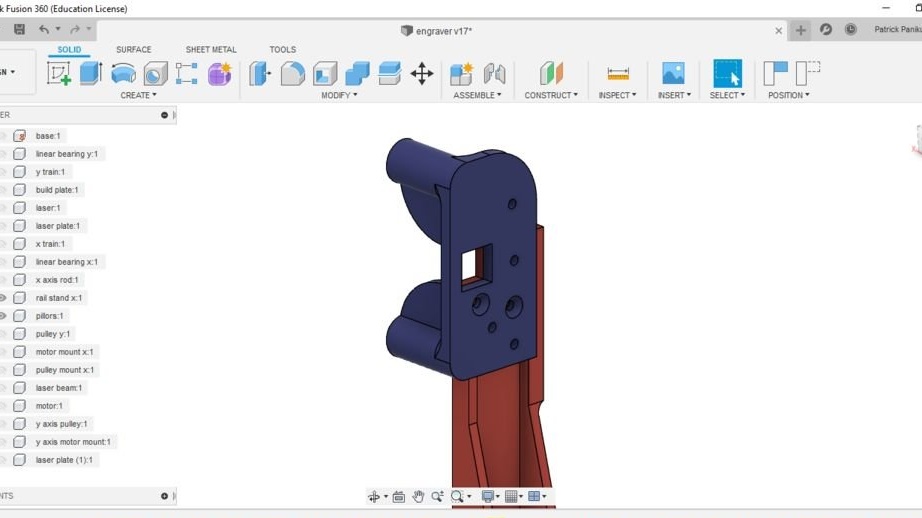
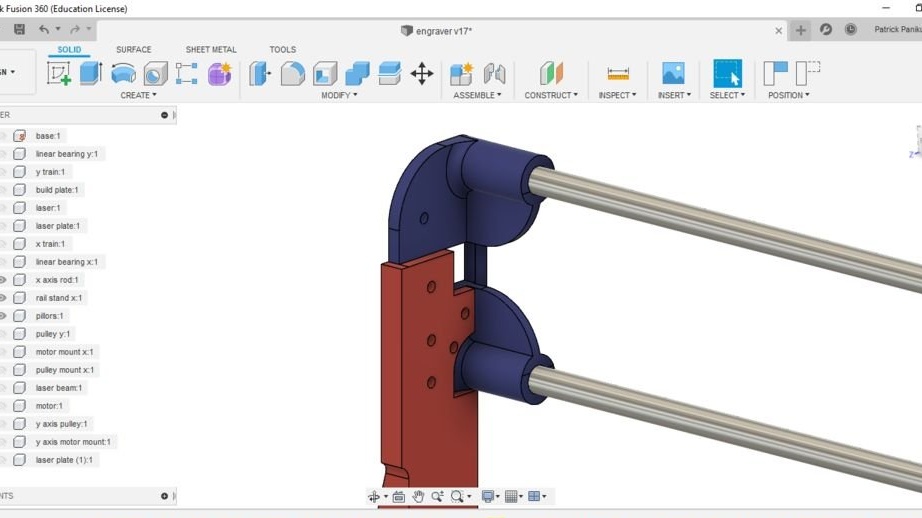
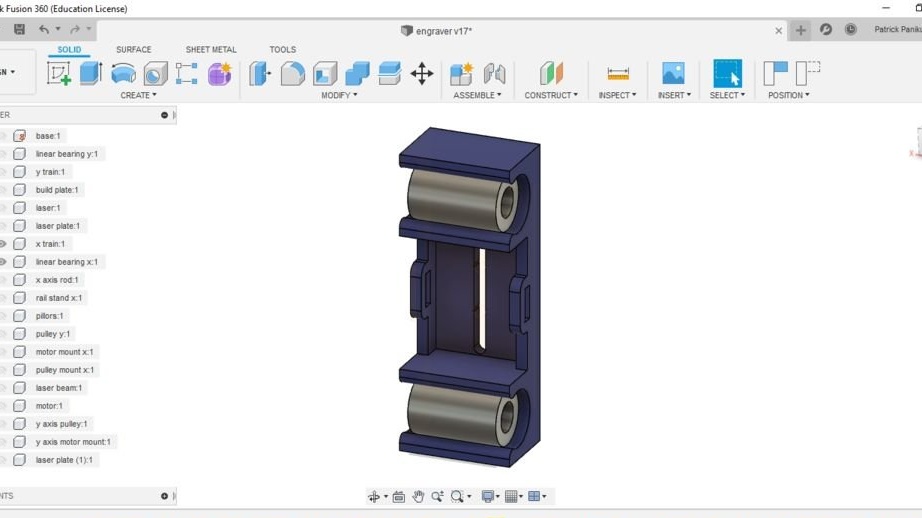
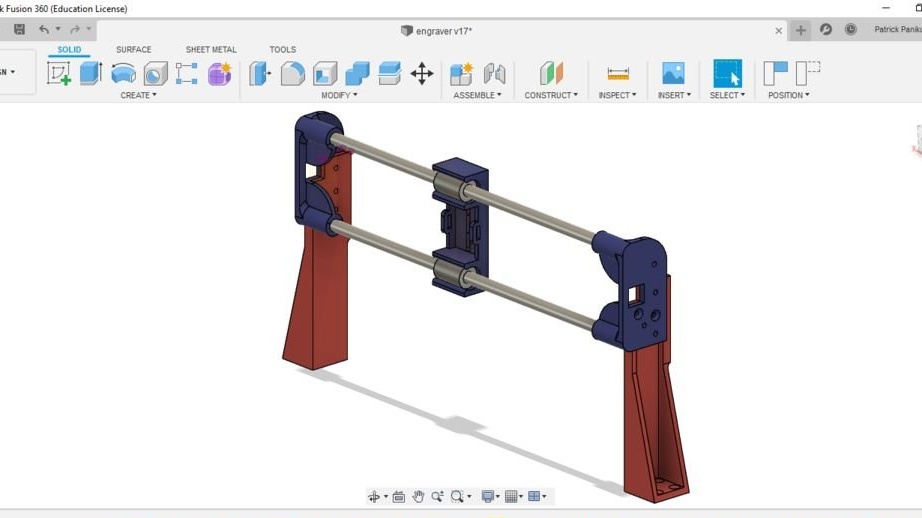
Ohjattu toiminto aloitti suunnittelemalla Y-akselin rungon ja pidikkeet. Koska pidikkeet koostuvat kahdesta identtisestä komponentista, Fusion 360: n peilitoiminto helpotti työtä. Peilitoimintoa käytettiin useita kertoja tämän laser kaiverruksen kehittämisessä.Toisin kuin muut CAD-ohjelmistot, yksi Fusion 360: n hienoista ominaisuuksista on, että sen avulla voit luoda useita komponentteja yhdelle näytölle linkin kanssa muihin komponentteihin, ts. malli voidaan suunnitella koottuna.
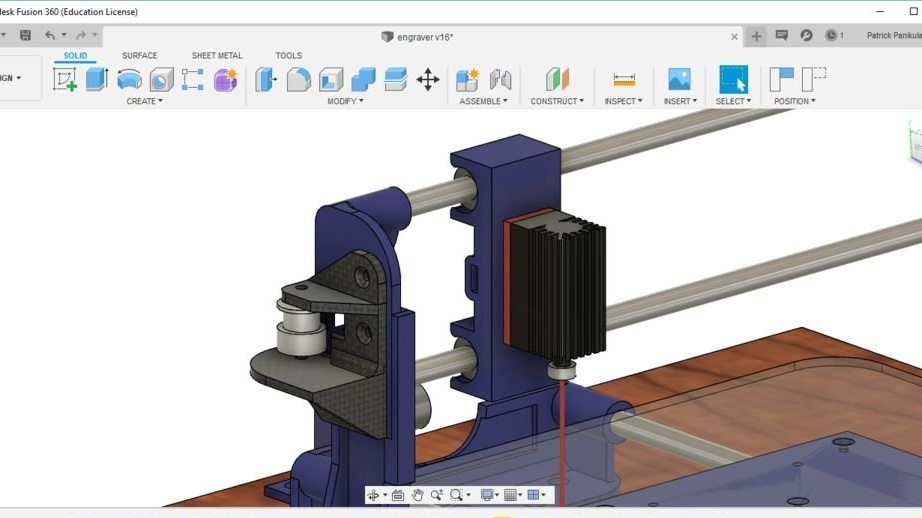
X-akselin ohjaimien korkeus riippuu käytetyn laserin polttovälistä. Sinun on vain varmistettava, että laserkorkeus on tällä alueella. Lasersäteen lopullinen tarkennus voidaan tehdä säätämällä linssiä laserilla.
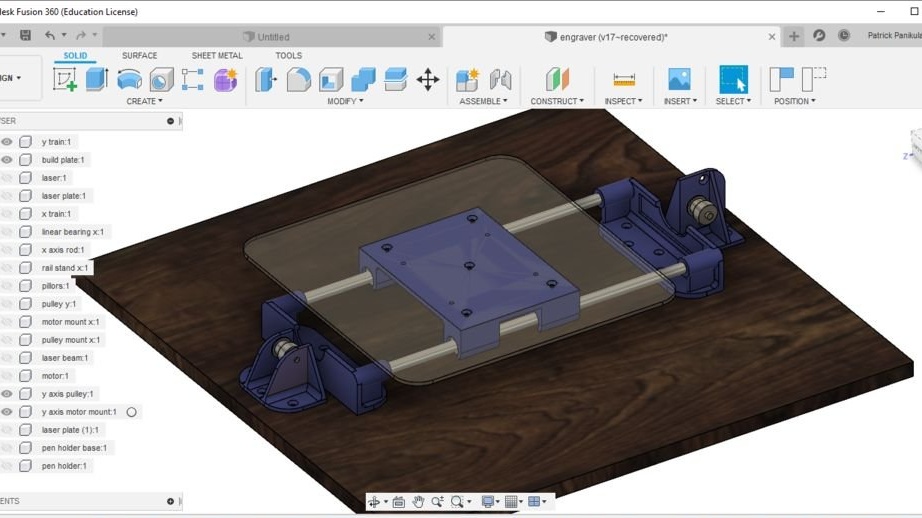
Fusion 360 antaa sinun myös valita komponenttien ulkoasun ja materiaalin, jotta lopullinen muotoilu näyttää todelliselta. Ohjelman avulla voit muuntaa ja tallentaa kehitettyjä komponentteja suoraan STL-muodossa 3D-tulostukseen.
Alla voit ladata Fusion 360 -tiedoston kaiverrusprojektin mukana.
laser kaivertaja v16.f3d
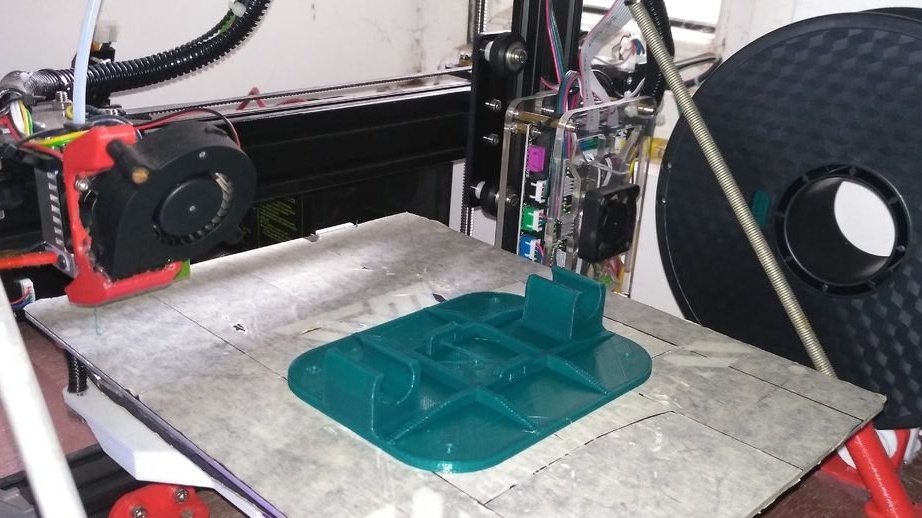
Vaihe toinen: 3D-tulostus
Sitten ohjattu toiminto alkaa tulostaa tietoja. Kaikki osat on suunniteltu siten, että ne voidaan helposti tulostaa 3D-tulostimella ilman tukia.
Ohjattu toiminto tulostaa yksityiskohdat TEVO 3D-tulostimella.
Materiaali: PLA (tummanvihreä)
Kerroksen korkeus: 0,3 mm
Täyttö: 30%
Seinämän paksuus: 0,8 mm
Ylä- / alapaksuus: 0,9 mm
Tulostustiedostot voidaan ladata napsauttamalla tätä linkki.

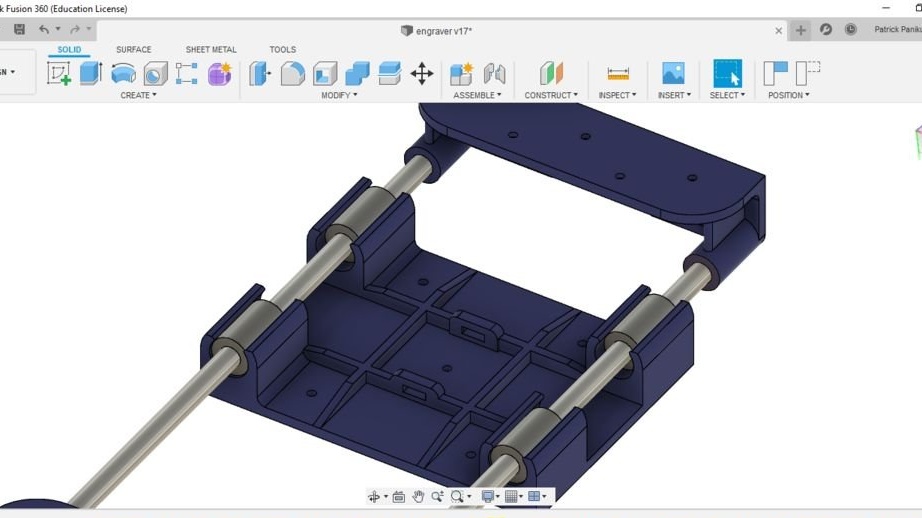
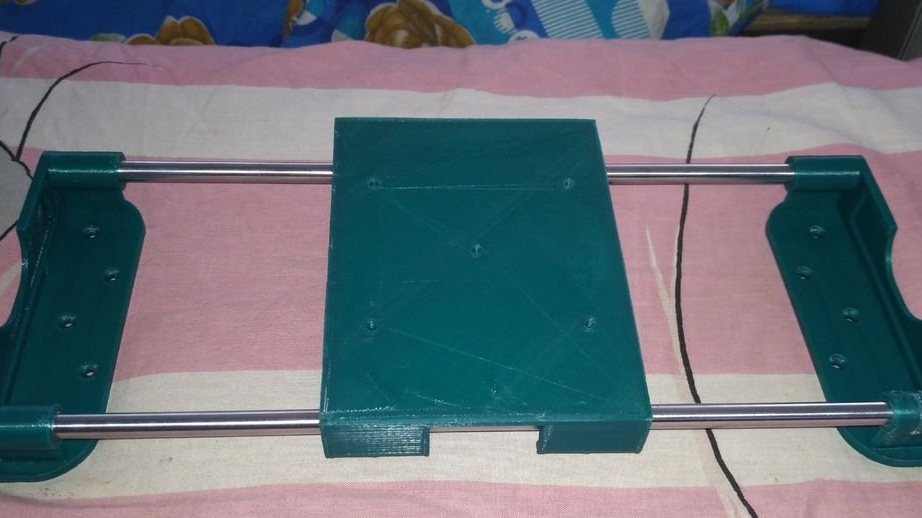
Vaihe kolme: Y-akselin kokoaminen
Ohjattu toiminto neuvoo avaamaan Fusion 360 PC -rakennustiedoston ennen kokoamista. Tämä auttaa rakennusprosessia ymmärtämään paremmin.
Ohjattu toiminto asentaa tangot ja lineaariset laakerit. Mestari on suunniteltu välttämään osien liimaamista, ts. istuvuus on tiukka. Tangot on täytettävä istuimeen vasaralla.
Asennuksen jälkeen varmista, että vaunu liikkuu vapaasti.



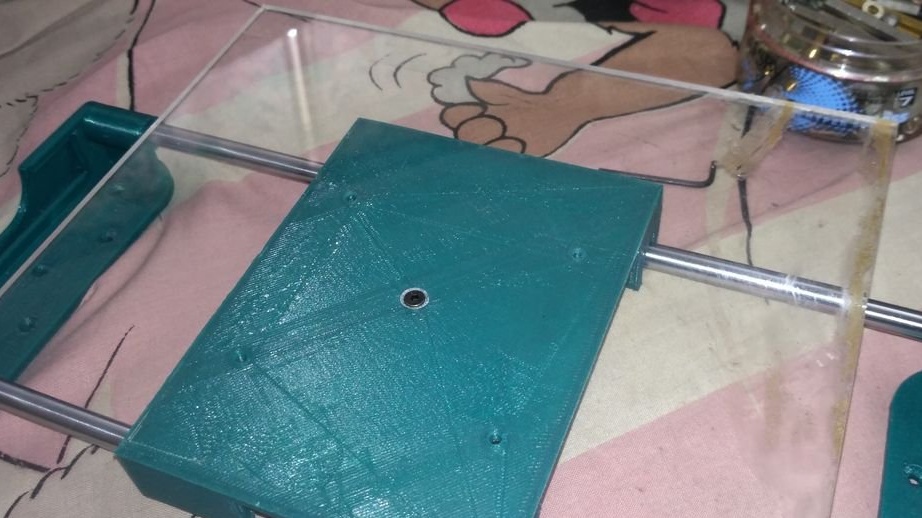
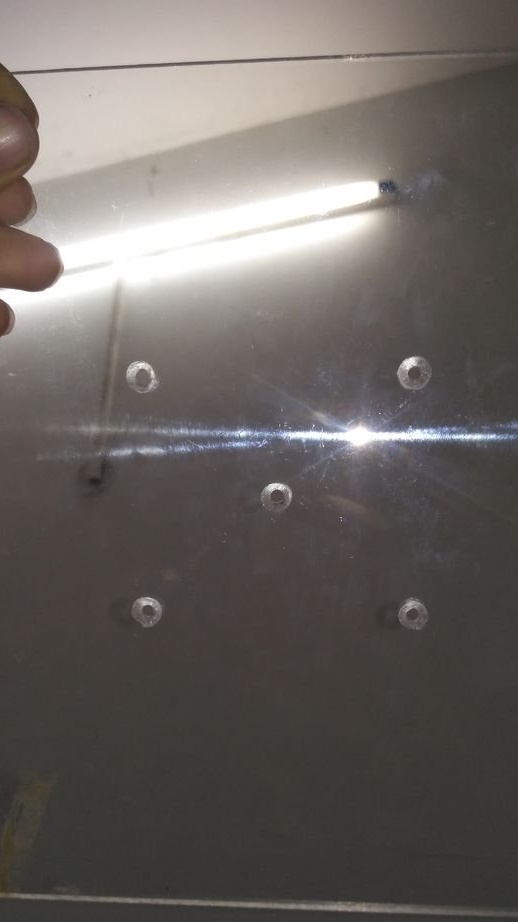
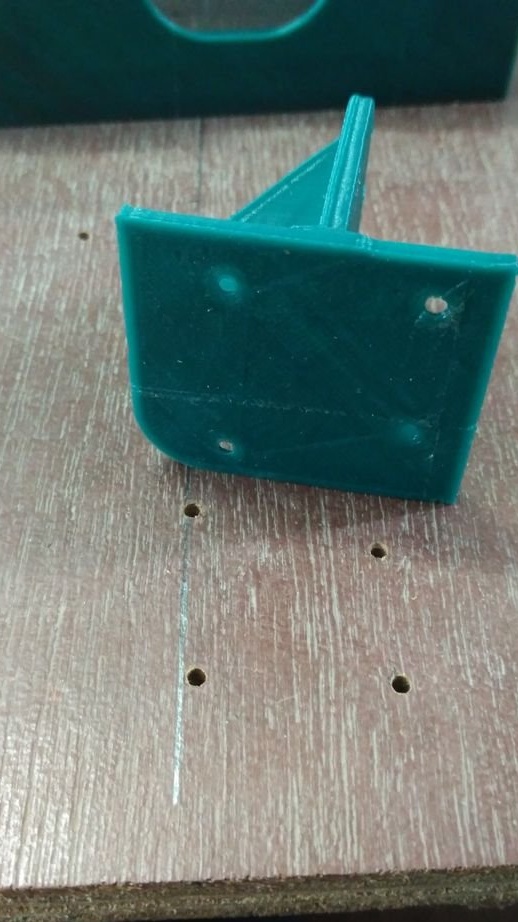
Vaihe neljä: Työpöytä
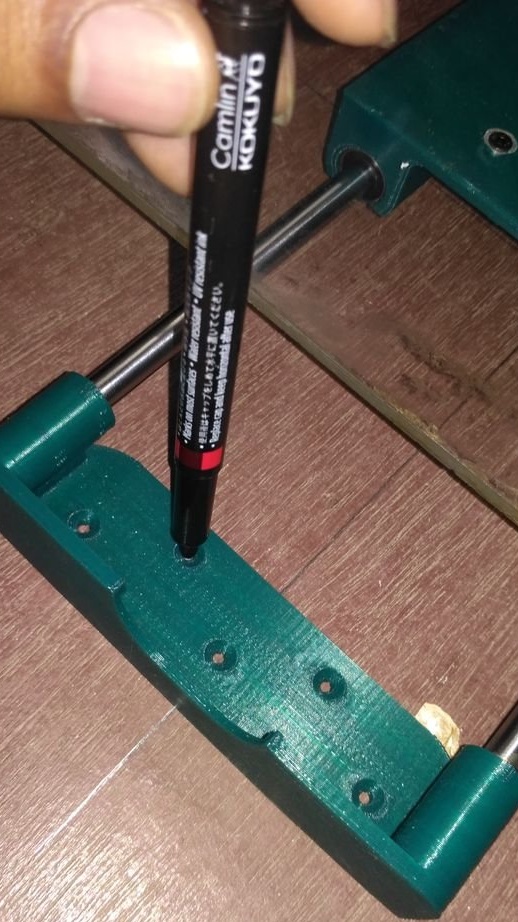
Reikä porataan akryylilevylle. Ruuvaa arkki kelkkaan ja asettaa arkin reunat tarkalleen vaunun reunojen suuntaisesti. Merkitsee ja poraa neljä asennusreikää. Ruuvit akryyli kelkkaan.





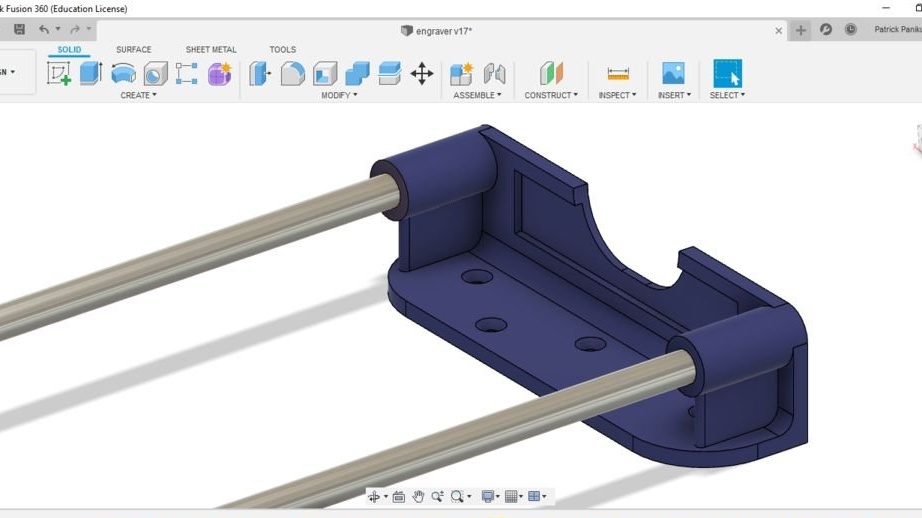
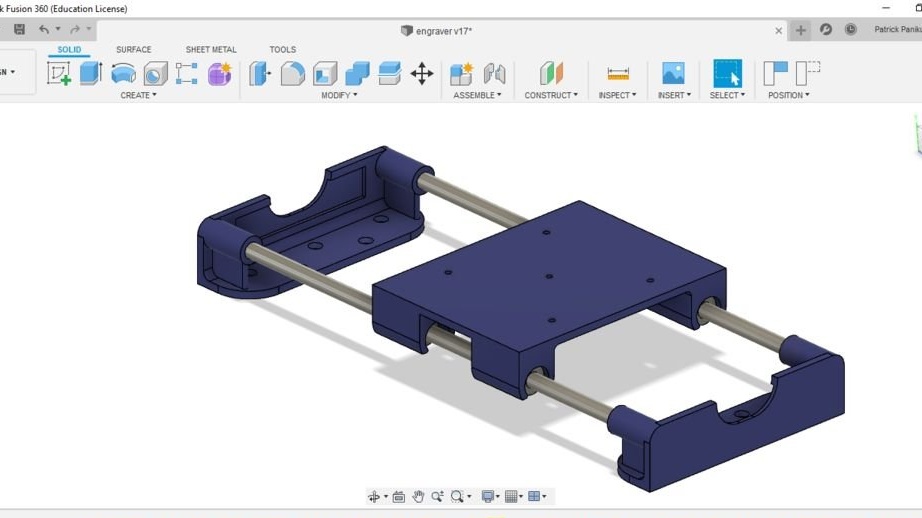
Vaihe viisi: X-akseli
Sitten isäntä kerää X-akselin. Asentaja on tulostanut akselin oppaat, koska hänen ostamansa osoittautuivat viallisiksi. Hänen mukaansa jauhatuksen ja voitelun jälkeen nämä ohjaimet eivät toimi huonommin kuin ostetut.





Vaihe kuusi: 28BYJ-48-yksinapaisen moottorin muokkaaminen bipolaariseksi
On kaksi pääasiallista syytä, miksi sinun täytyy muuntaa yksinapainen moottori bipolaariseksi moottoriksi.
Bipolaarisen moottorin ohjausalgoritmi A4988-askelmoottoriohjaimen avulla on yksinkertaisempaa kuin yksinapaisen moottorin ohjaaminen
Laajennuskortti tukee vain bipolaarisia askelmoottoreita.
Voit muokata moottoria kolmessa vaiheessa.
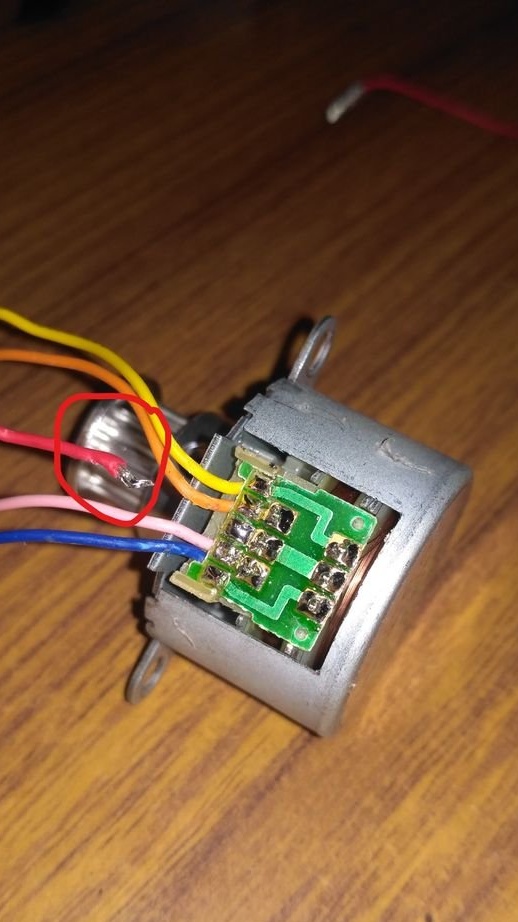
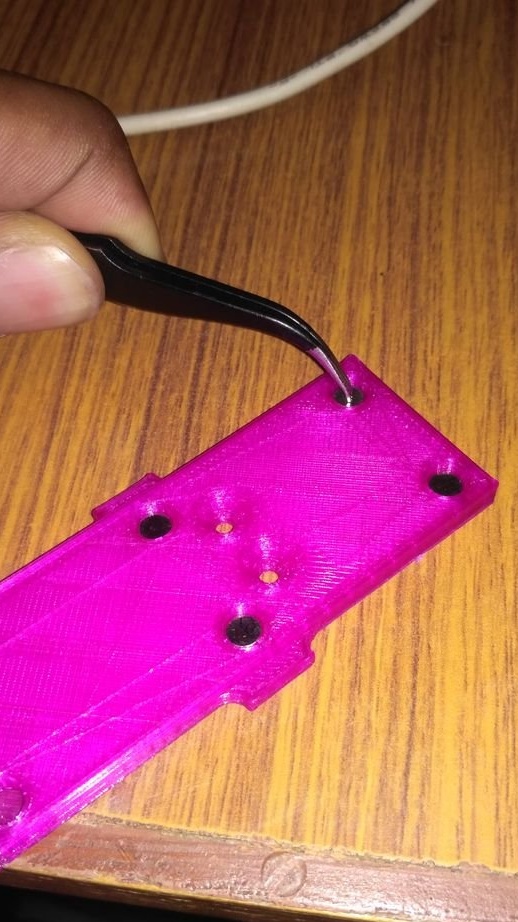
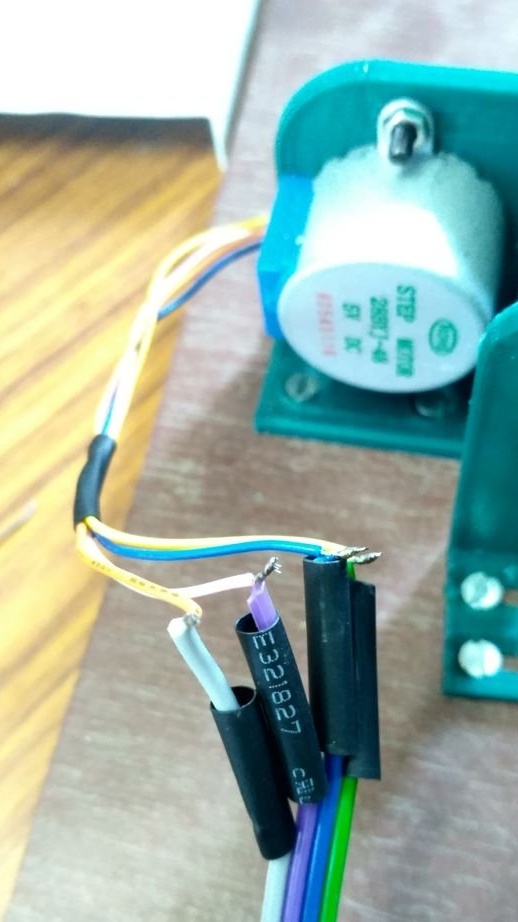
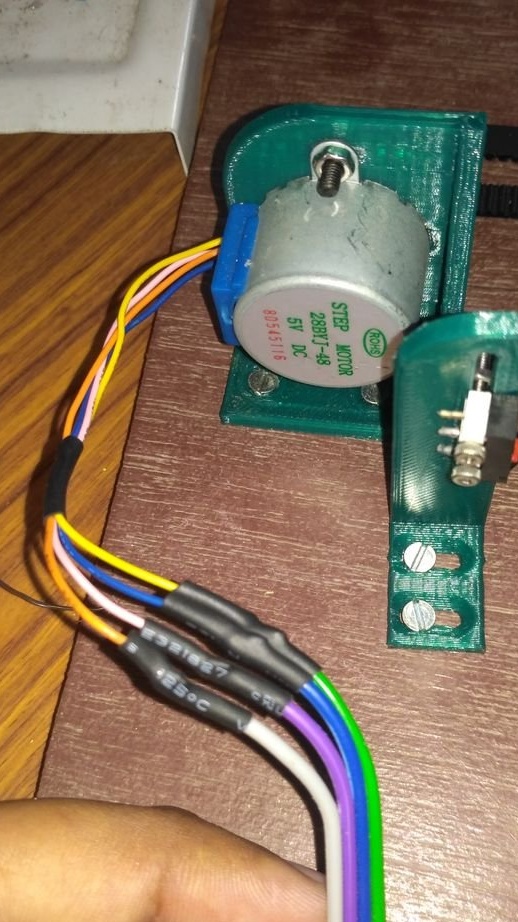
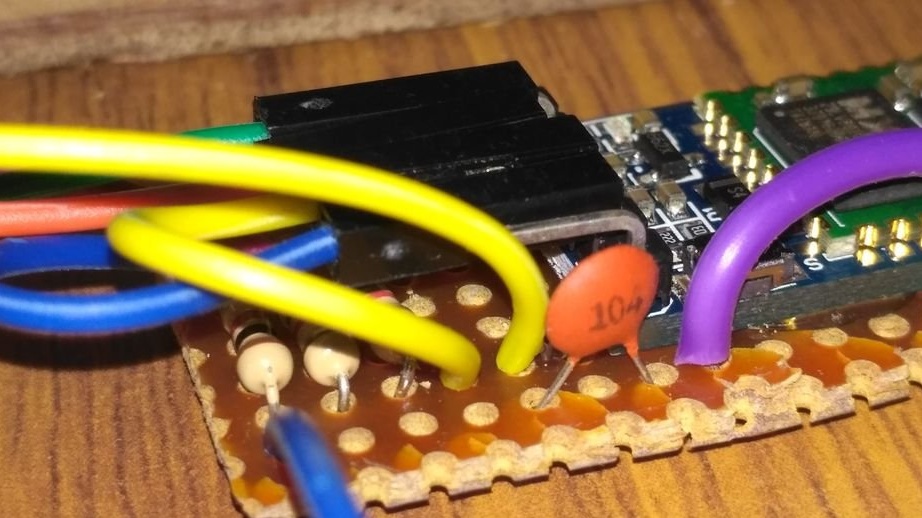
Avaa sininen muovikotelo, irrota punainen johdin levyltä, kuten ensimmäisessä kuvassa.
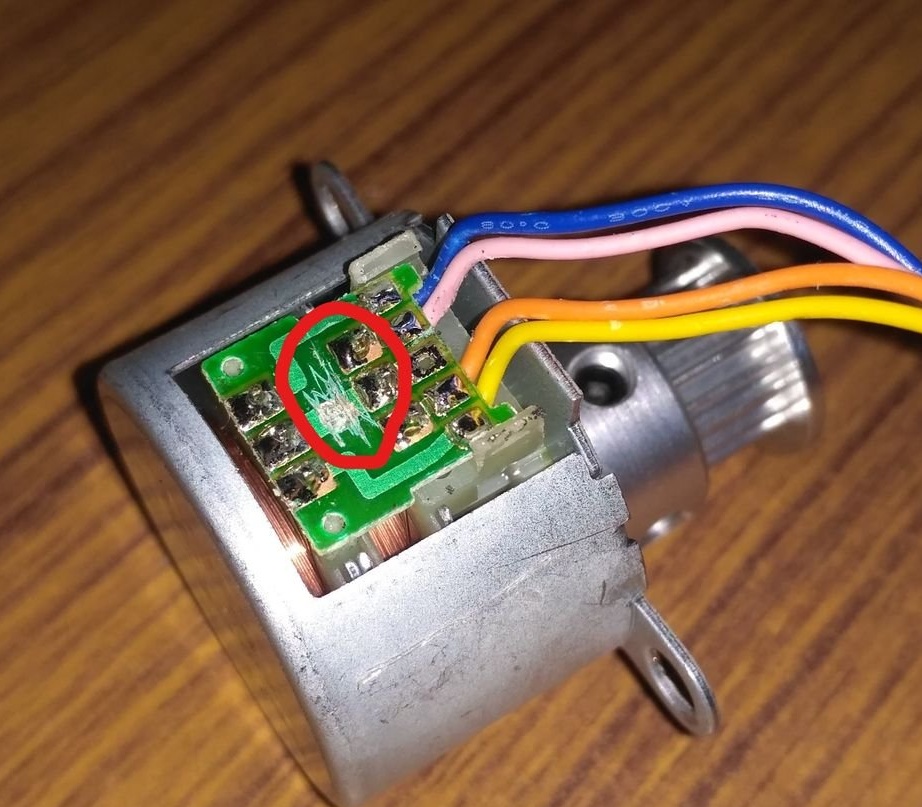
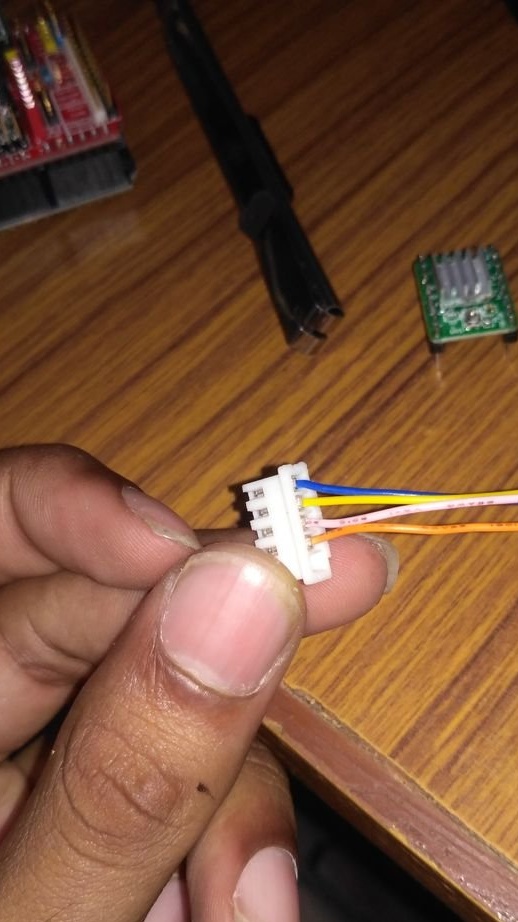
Nyt sinun täytyy vahingoittaa raita, kuten toisessa valokuvassa, ja vaihtaa lohkon johdot, kuten kolmannessa valokuvassa.
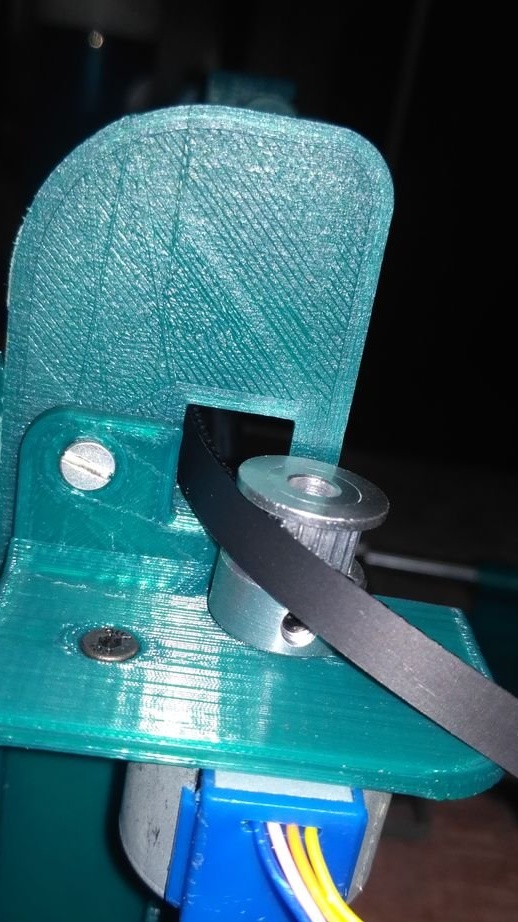
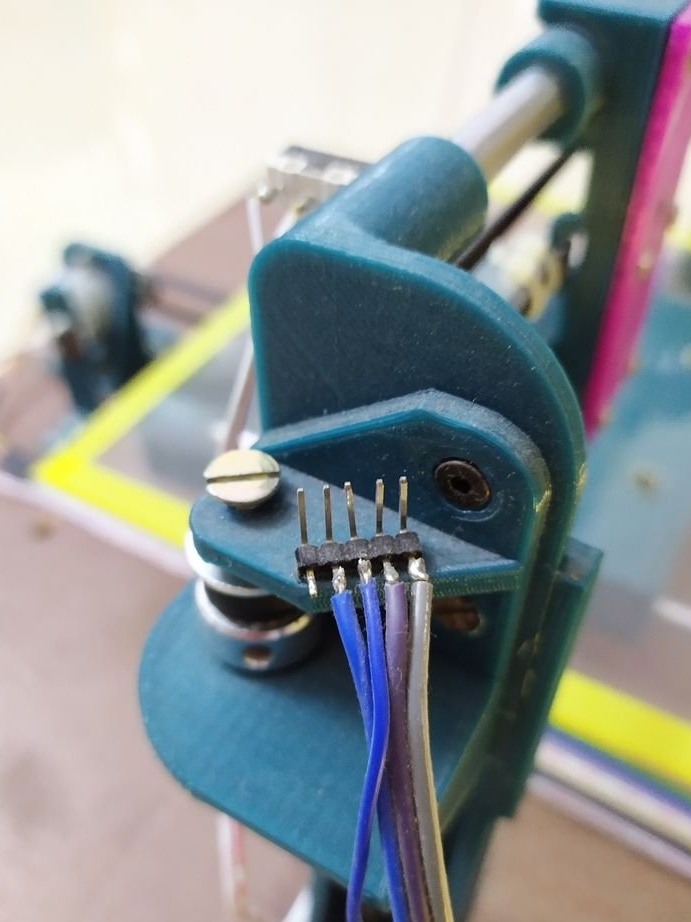
Seitsemäs vaihe: moottorin, hihnapyörän, hihnan asennus
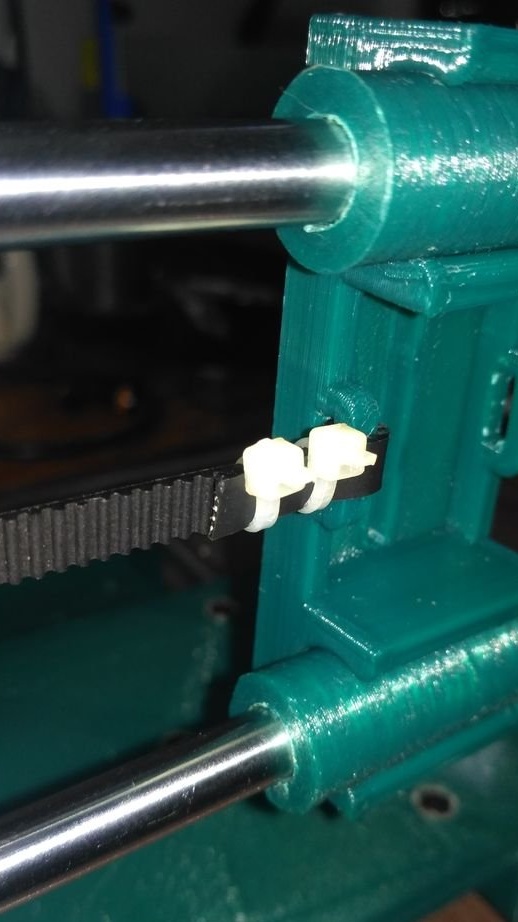
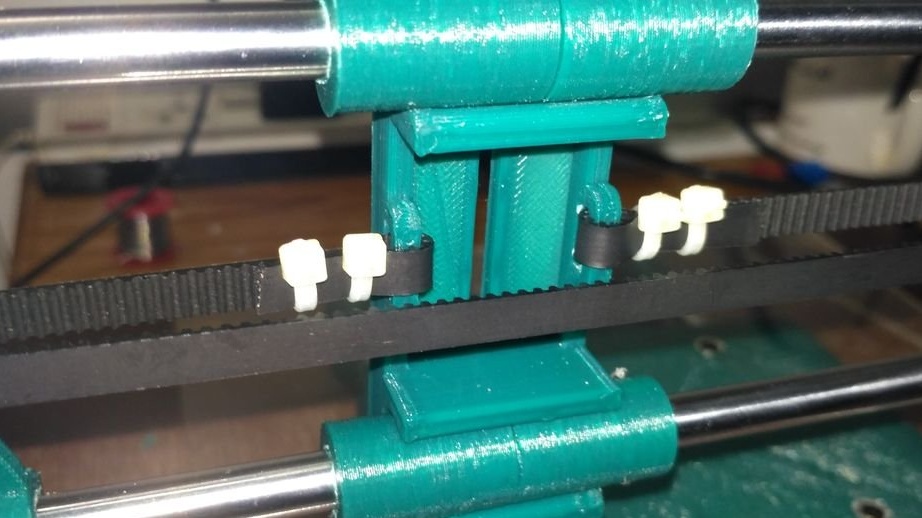
Asentaa moottorin. Akselilla moottori kiinnittää hihnapyörän. Toinen hihnapyörä asetetaan moottorin vastakkaiselle puolelle. Kiinnittää hihnan pää siteillä. Ohjaa hihnan toisen pään hihnapyörien läpi ja kiinnittää myös.



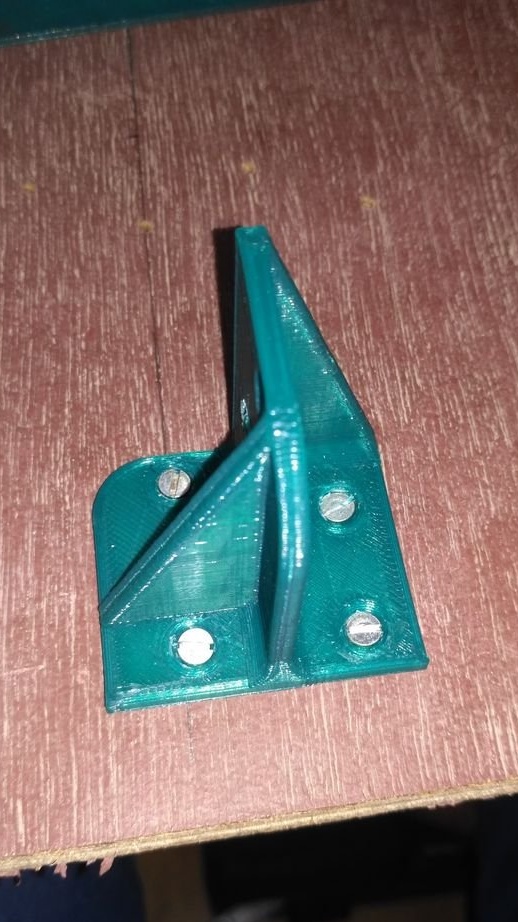
Kahdeksas vaihe: säätiö
Pohja on valmistettu vanerista. Mestari kiinnittää häneen X-akselin.







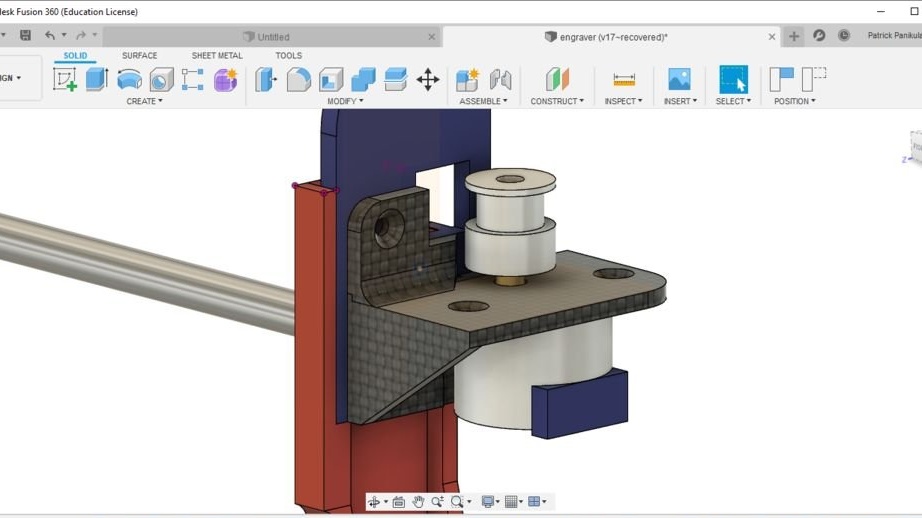
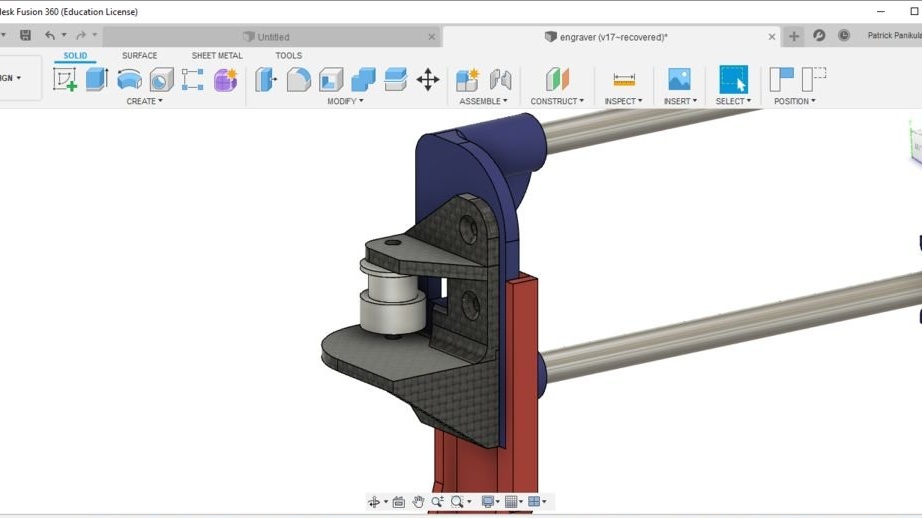
Vaihe yhdeksän: Y-akseli
Kerää Y-akselin, tämä on vaikea vaihe.
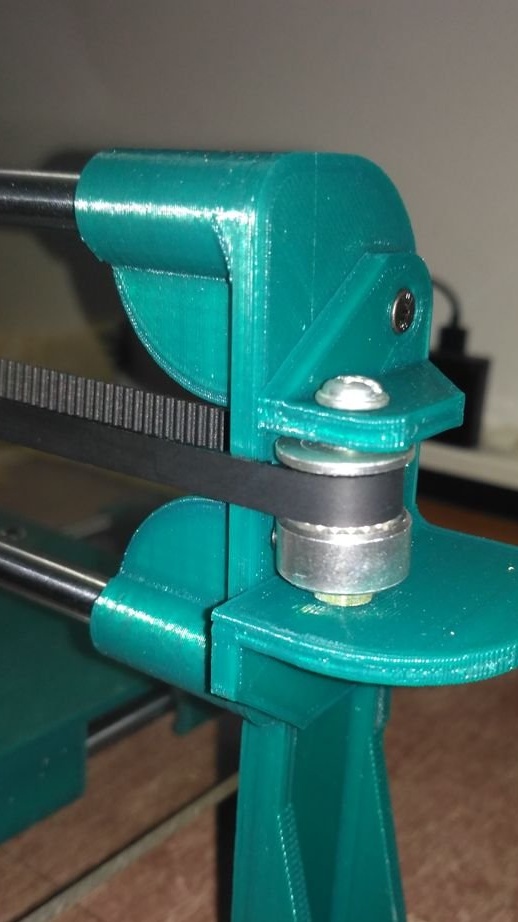
Kokoa hihnapyörä pitimellä Y-akselin hihnapyörällä, hihnapyörällä, 40 mm M4-pultilla / mutterilla ja metallilevyillä kahdessa ensimmäisessä kuvassa esitetyllä tavalla.


Kiinnitä jakohihnan toinen pää yhteen Y-akselin vaunun alla oleviin uriin.
Liu'uta hihnan vapaa pää aikaisemmin tekemäsi hihnapyöräkokoonpanon läpi ja napsauta sitten toiseen uraan, joka sijaitsee Y-akselin vaunun alla.
Kun nämä 3 vaihetta on suoritettu, sinun täytyy ruuvata Y-akselikokoonpano vanerin pohjaan.



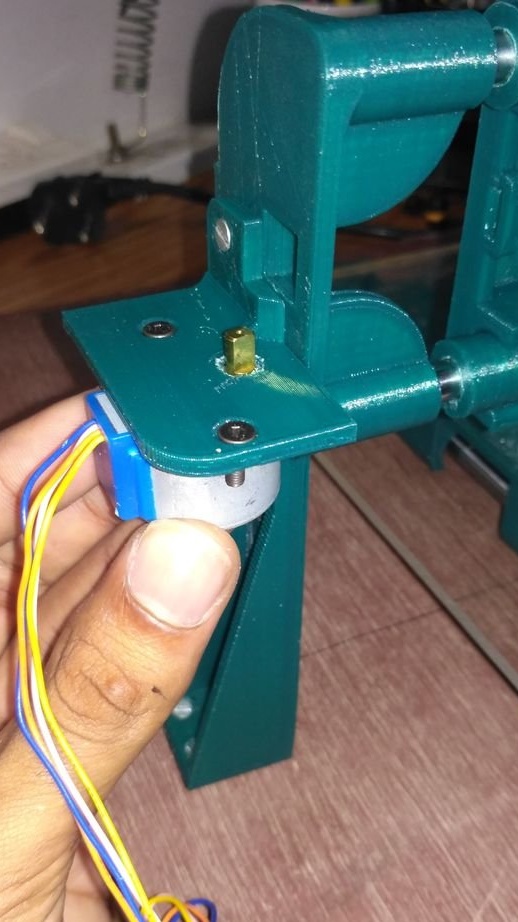
Kiinnitä askelmoottori Y-akselin moottorin kiinnikkeeseen kahdella 12 mm M3-ruuvilla ja mutterilla.
Ruuvaa nyt Y-akselin hihnapyörän pidike ja moottorin kiinnitys vanerin pohjaan.Tee tämä säätämällä molemmat puolet oikean hihnan kireyden saamiseksi. Vyönkiristin lisätään myöhemmin.

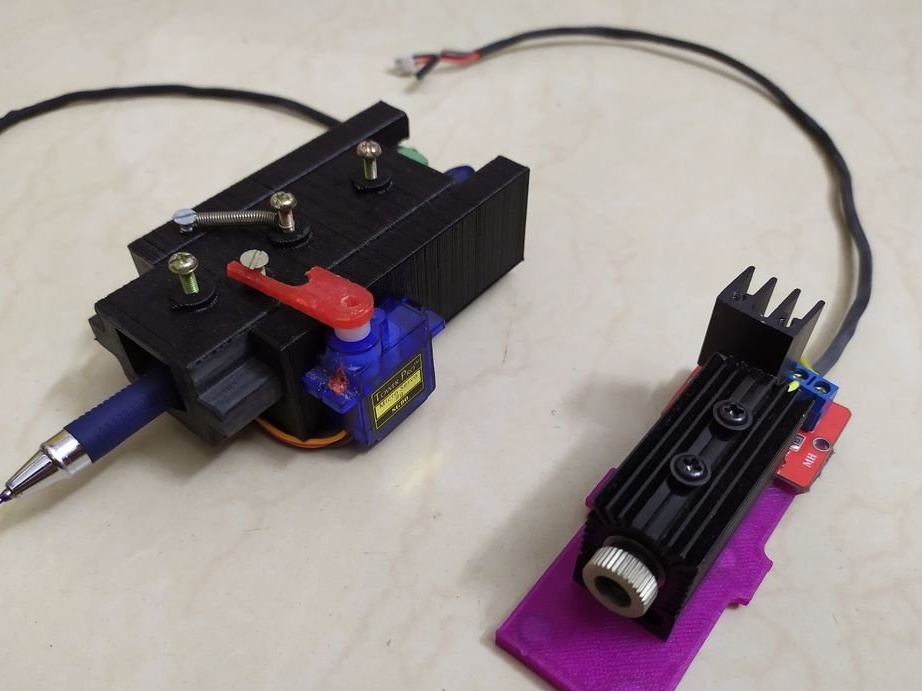
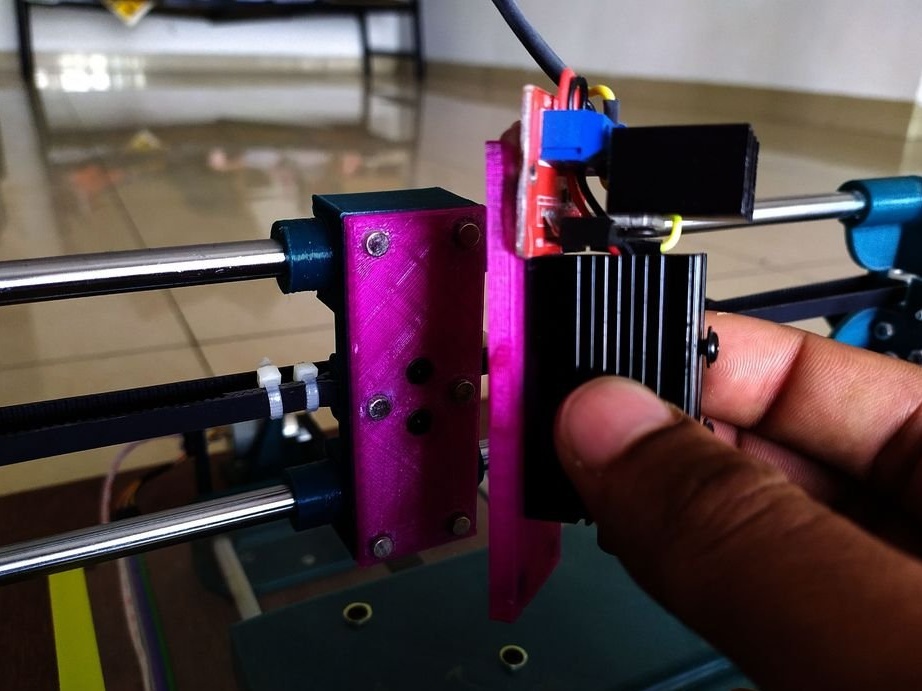
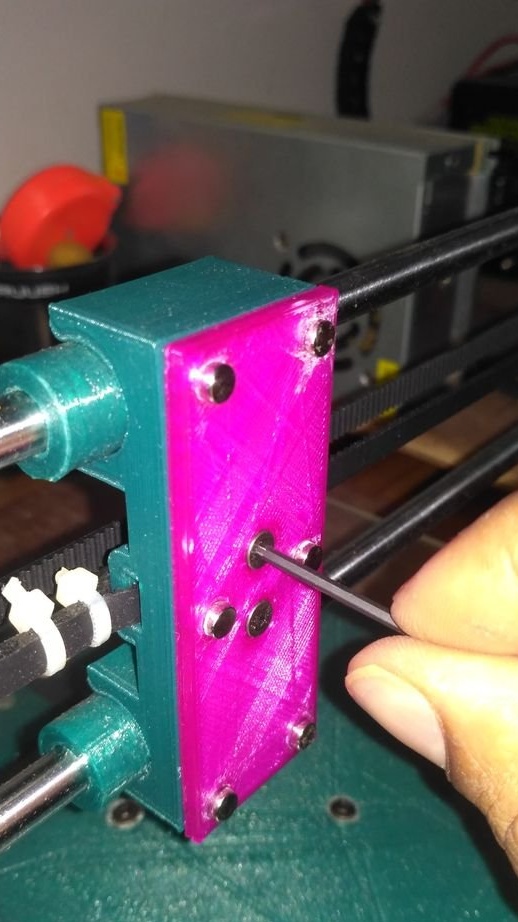
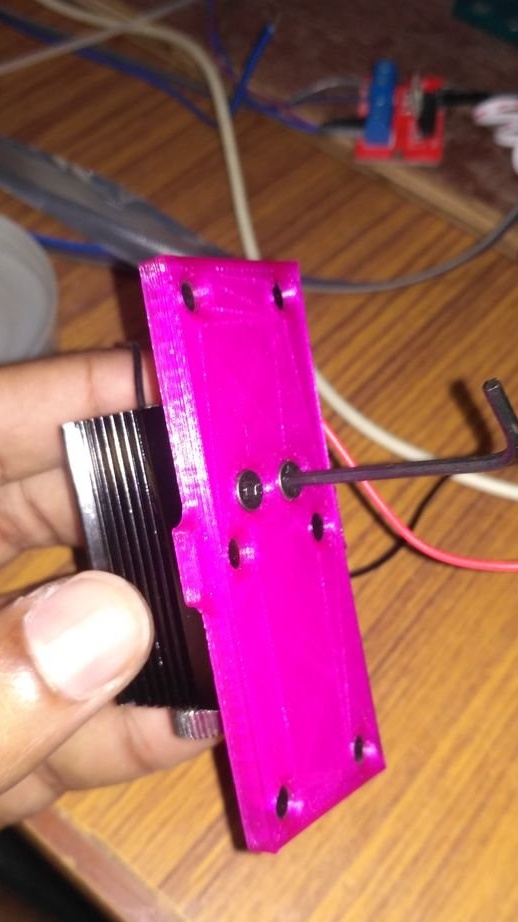
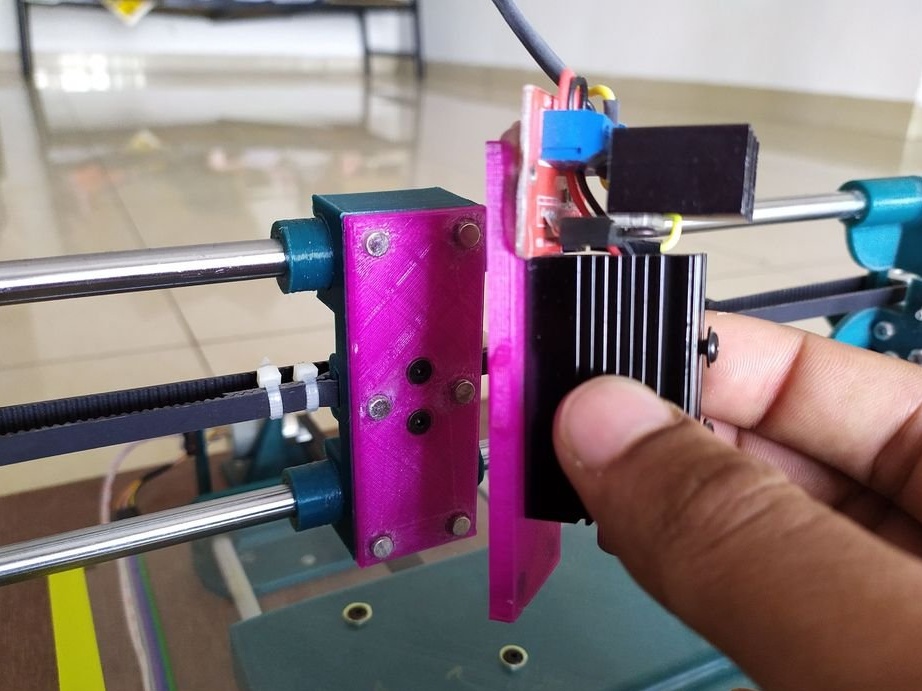
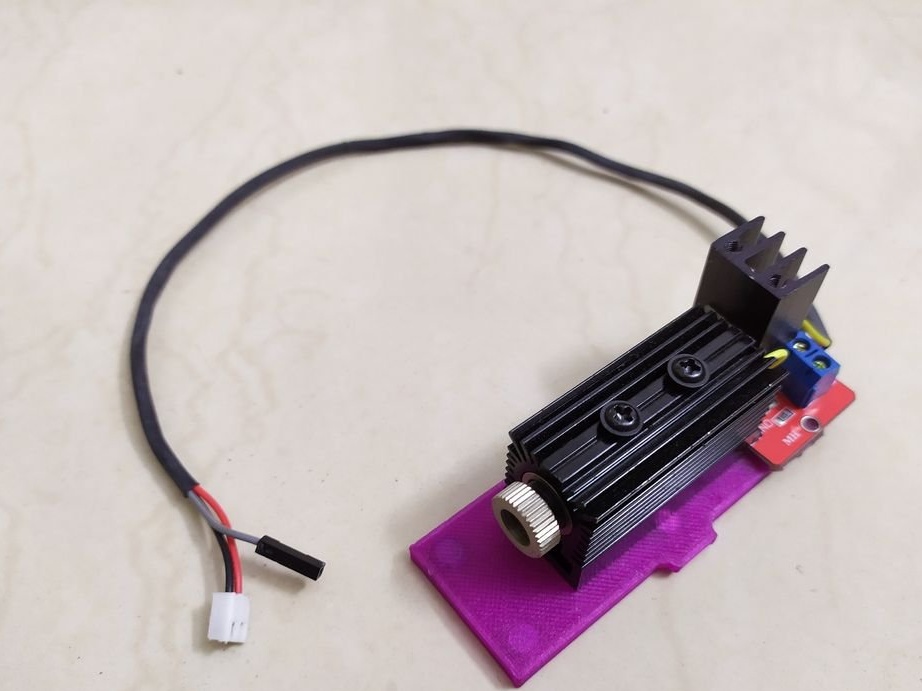
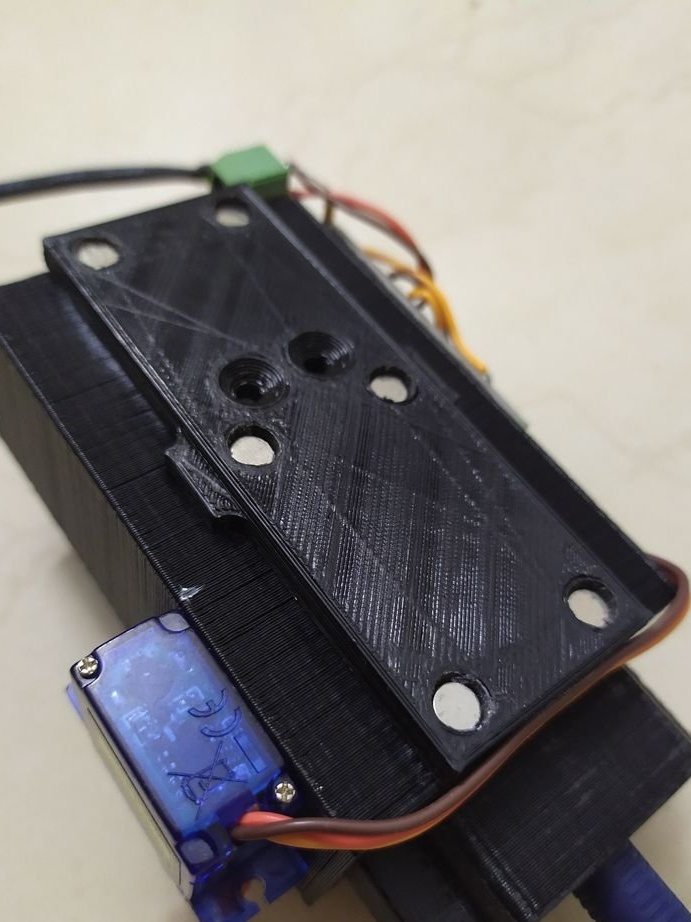
Vaihe kymmenen: Lasermoduuli
Kuten osoitettiin, määrityksissä kone toteutti lasermoduulin nopean korvaamisen muilla toimeenpanomoduuleilla. Tätä varten päällikkö teki kaksi suorakulmaista osaa (kannet). Jokaiseen asennetaan kuusi neodyymimagneettia. Yksi kansi on kiinnitetty X-akseliin, lasermoduuli on kiinnitetty toiseen.
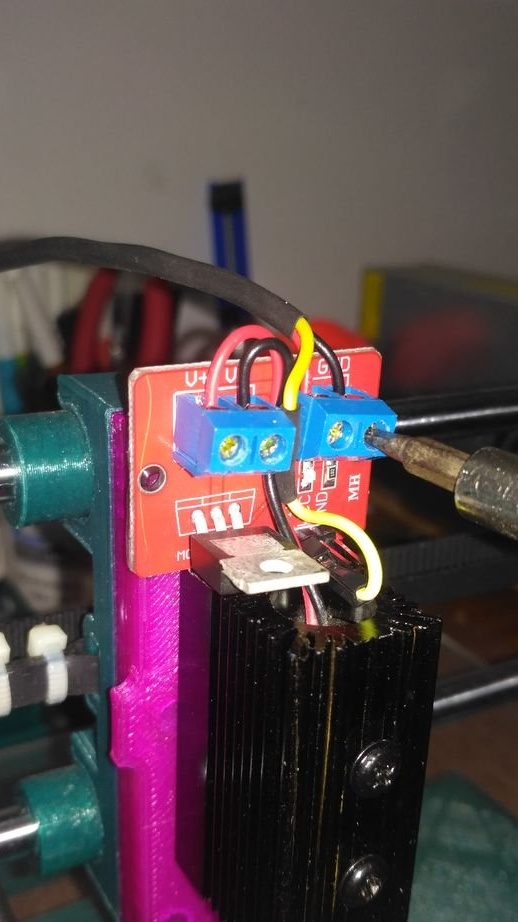
Johdot asennetaan seuraavasti.
+ ja - laserit on kytketty MOSFET-moduulin V + ja V-, vastaavasti. Virta on kytketty vastaavasti VCC: hen ja GND: hen. Signaalikaapeli on kytketty MOSFET-moduulin signaalitappiin.




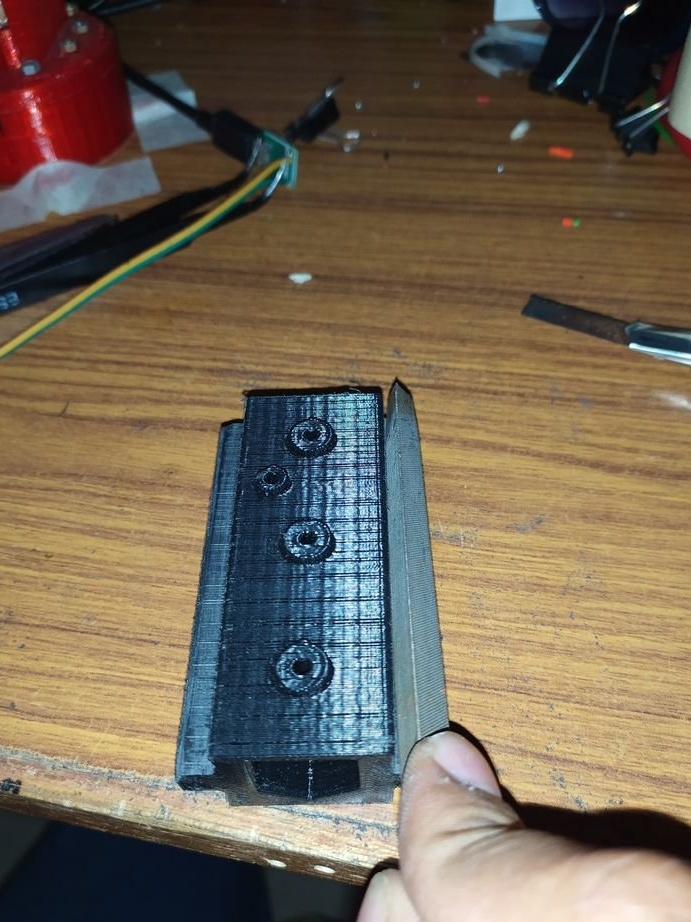
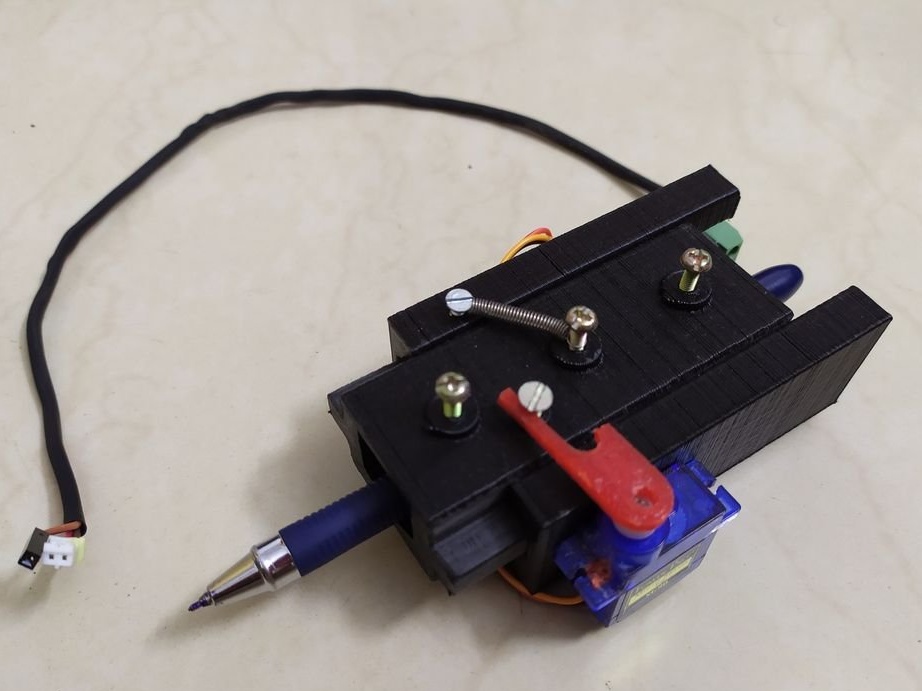
Vaihe yksitoista: piirturi
Kerää piirtäjän. Heti kun molemmat osat on painettu, päällikkö kiillottaa toistensa kanssa kosketuksissa olevat tasot, tasoittaa ne viilalla ja hiekkapaperilla, kunnes molemmat osat liukuvat hyvin pienellä kitkalla.



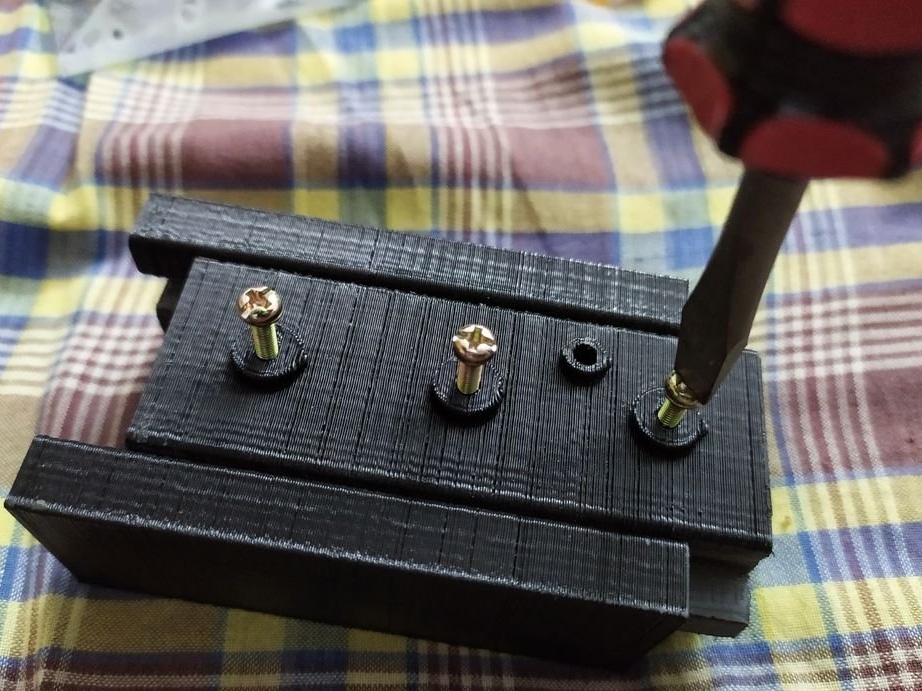
Kiristä nyt 40 mm M3-ruuvit ja säätää jousi.
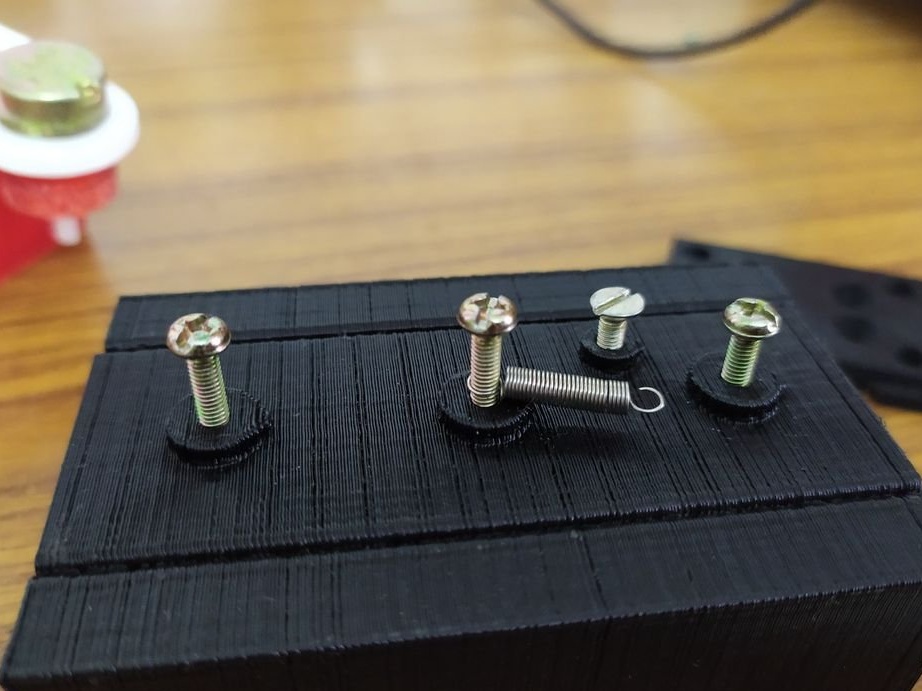
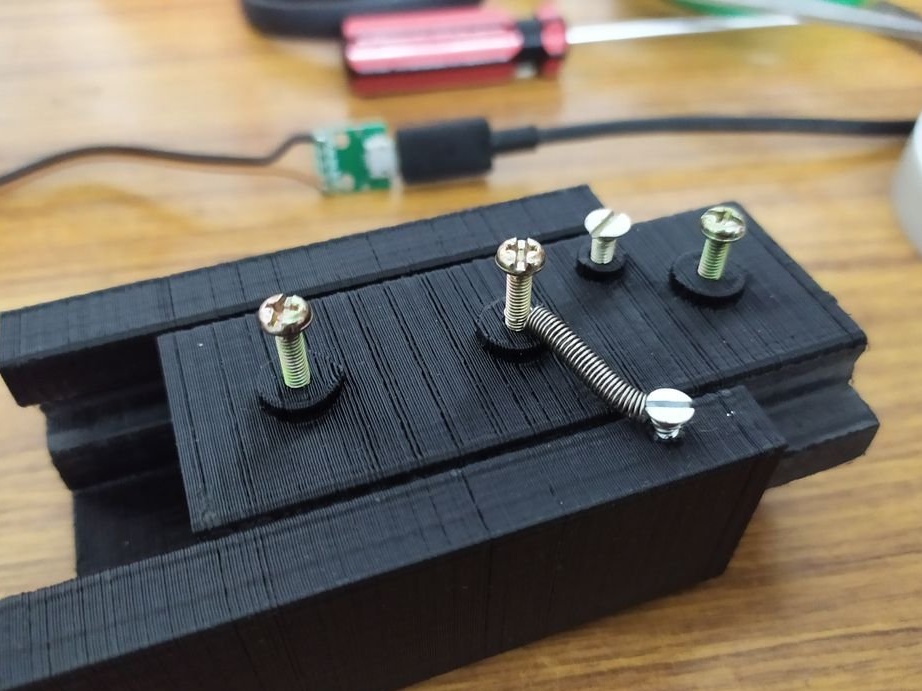
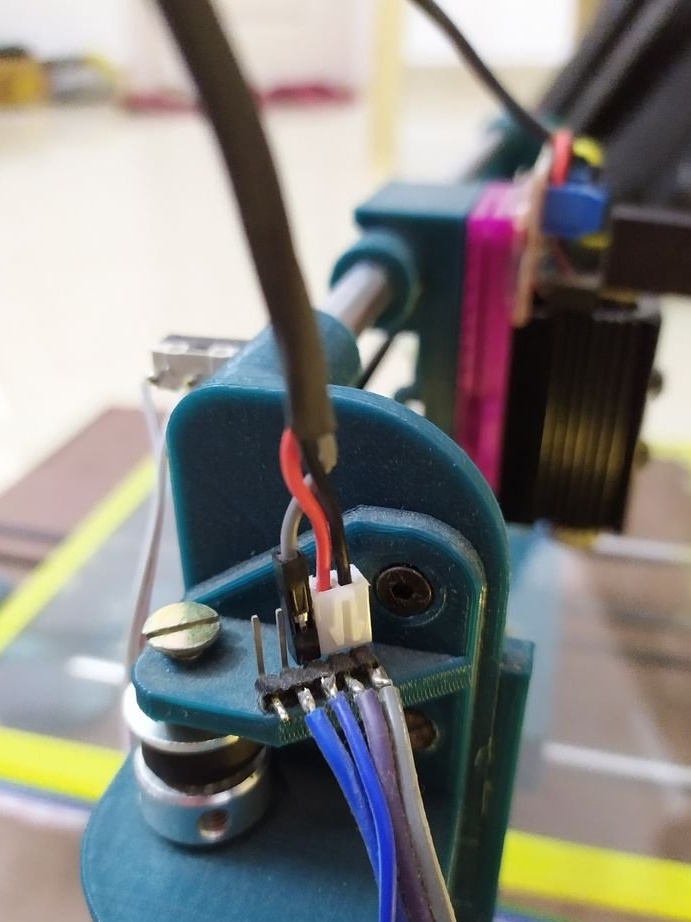
Servomoottori, liittimet ja Arduino tikkuvat kuvan osoittamalla tavalla.
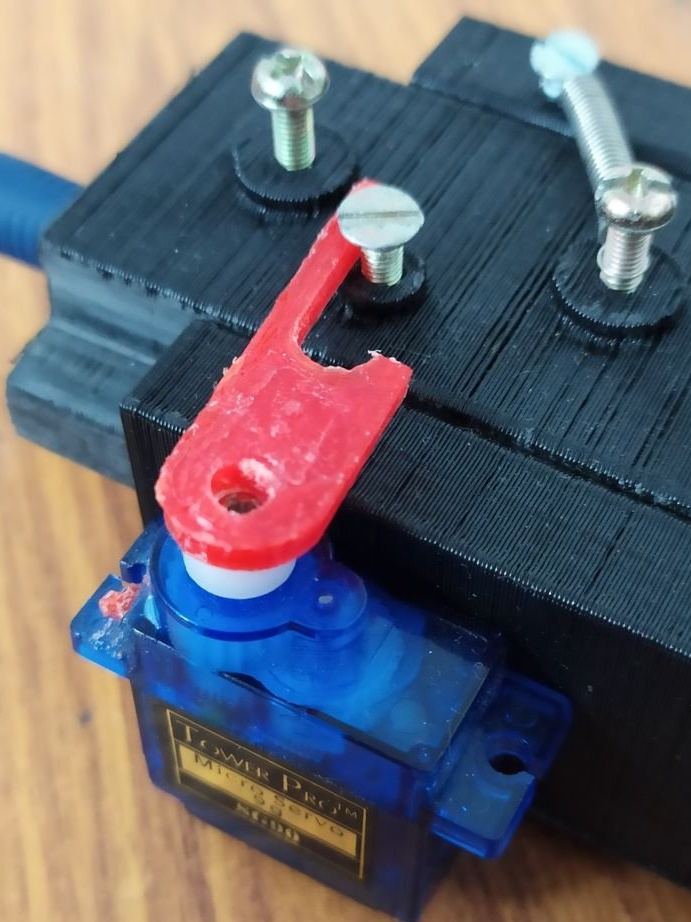
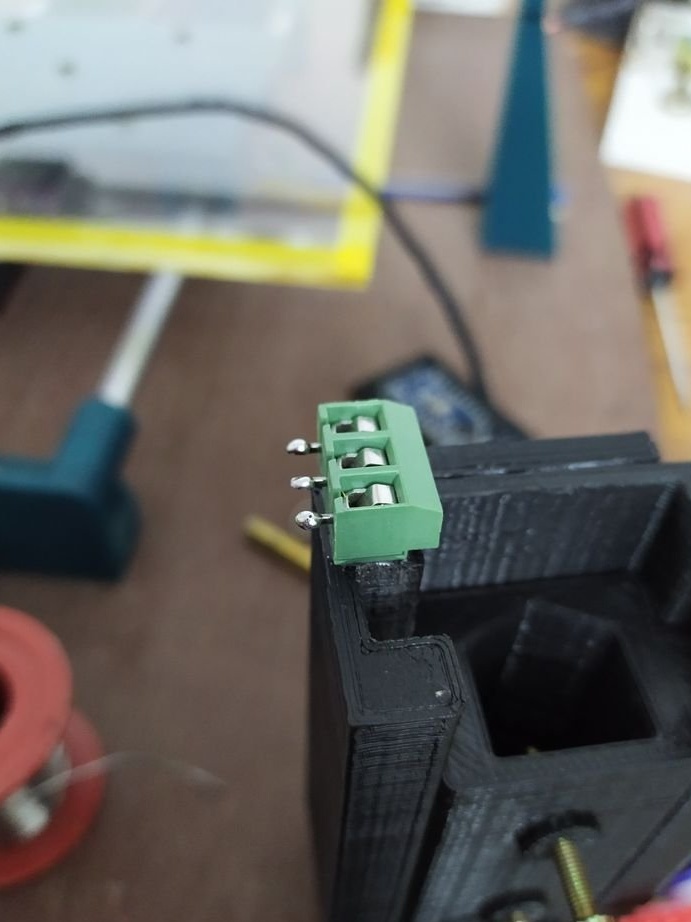
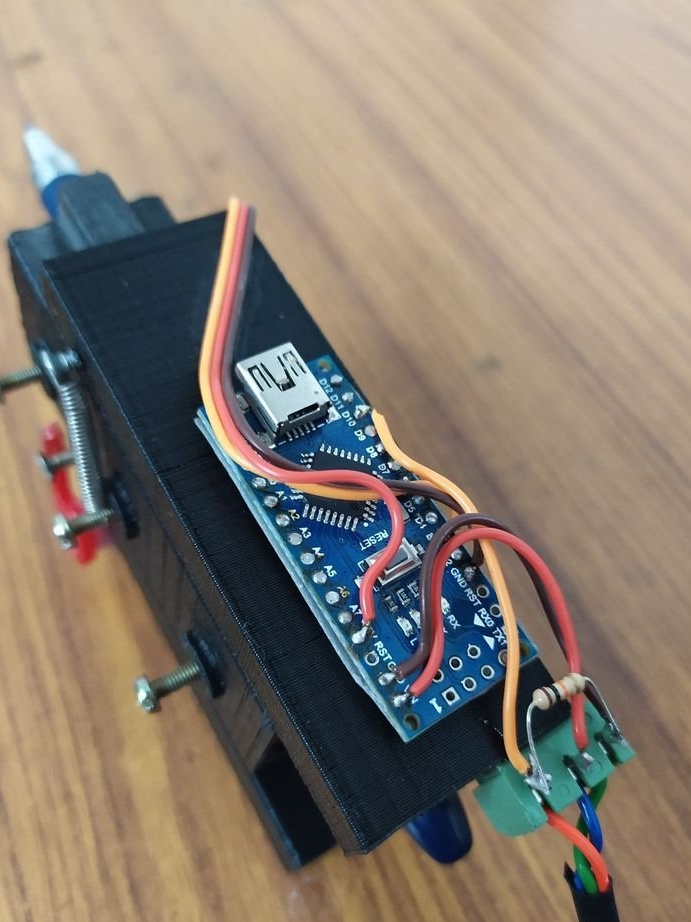
täällä Työläs nanoa käytetään muuntamaan laserohjaussignaalit PWM-signaaleiksi, jotka voivat ajaa mikromotoria.
Se on kytketty seuraavasti:
+5 V - Vin
-5 volttia - GND
Signaali - D10
Servovoima + ve - 5V
Servo power -ve - GND
Servosignaali - D3
Sitten koodi ladataan.
# Sisällytä Servo myservo;
tyhjä asennus ()
{
myservo.attach (3);
pinMode [10, INPUT];
}
tyhjä silmukka ()
{
if (digitalRead (10) == KORKEA)
{
myservo.write (20);
}
muu
{
myservo.write (60);
}
}
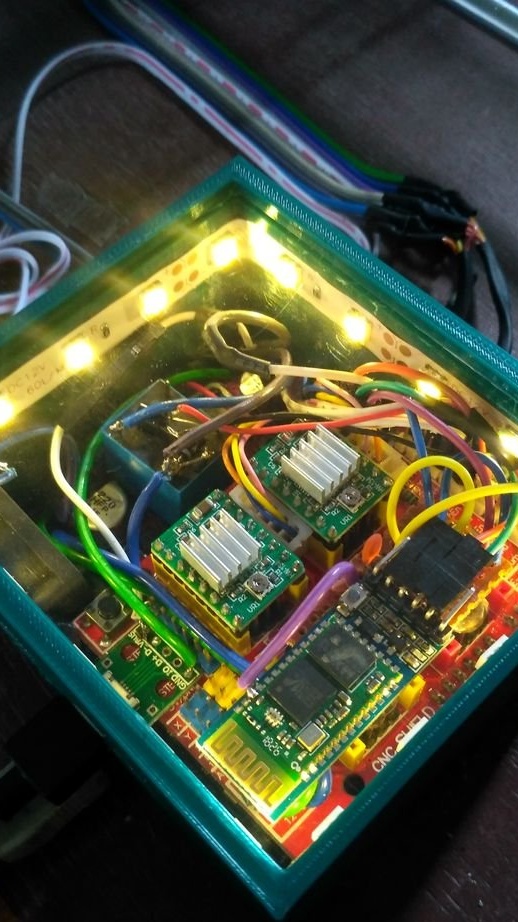
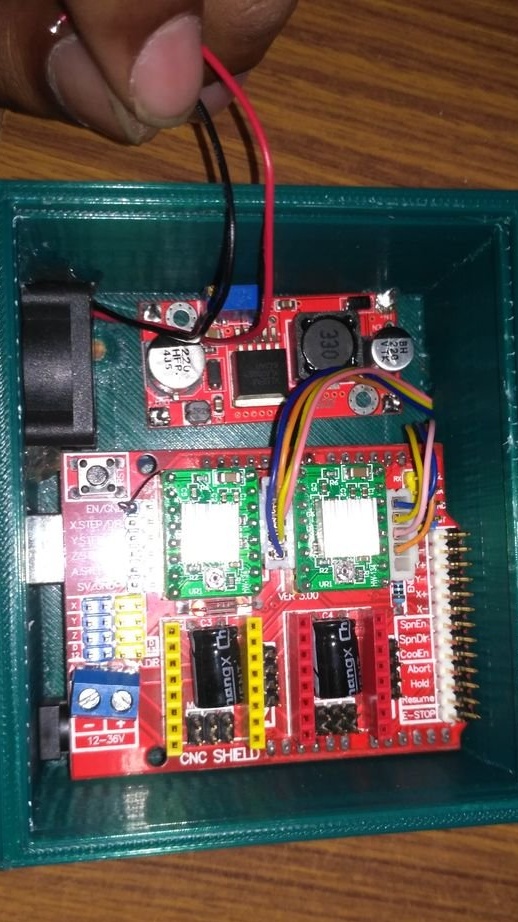
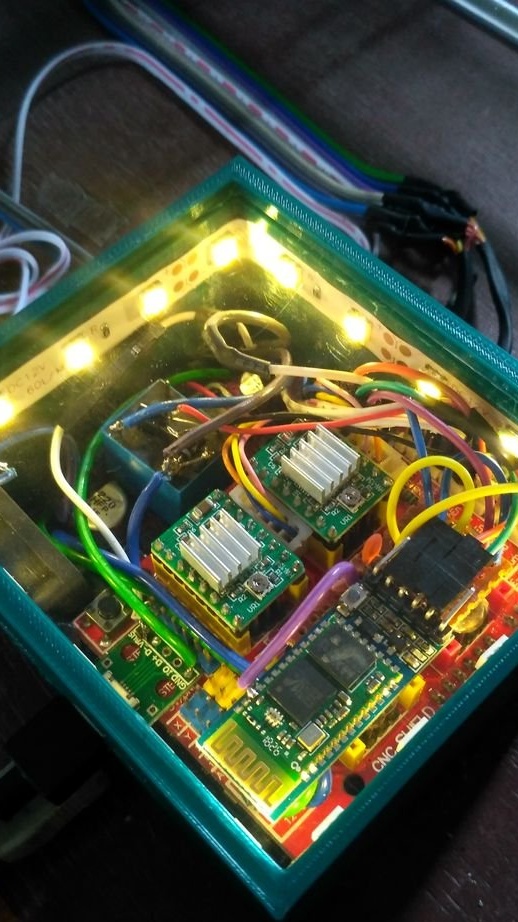
Vaihe 12: Asennus
Asennus kaavion mukaan.
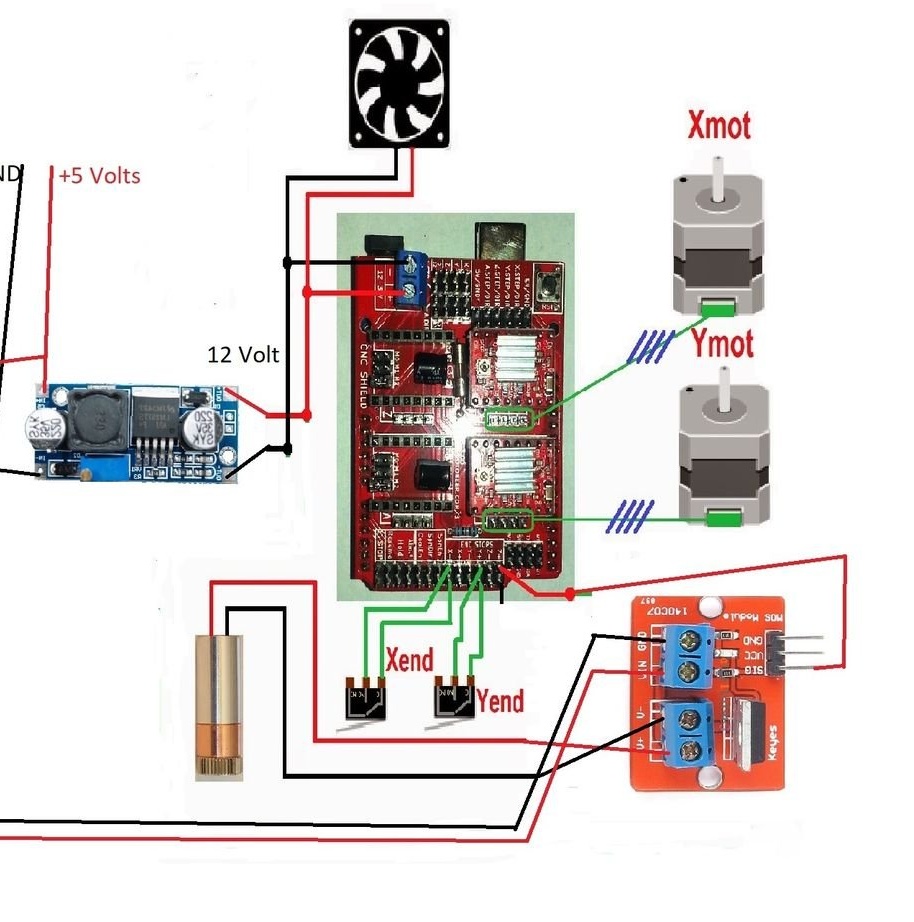
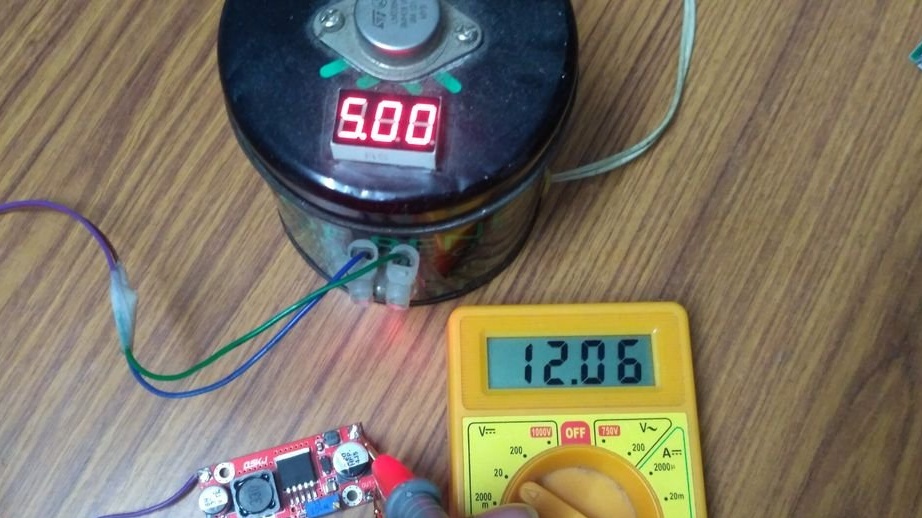
Lisäysmuuntimen arvoksi asetetaan 12 V.
Arduino on asennettu CNC-laajennusmoduuliin.
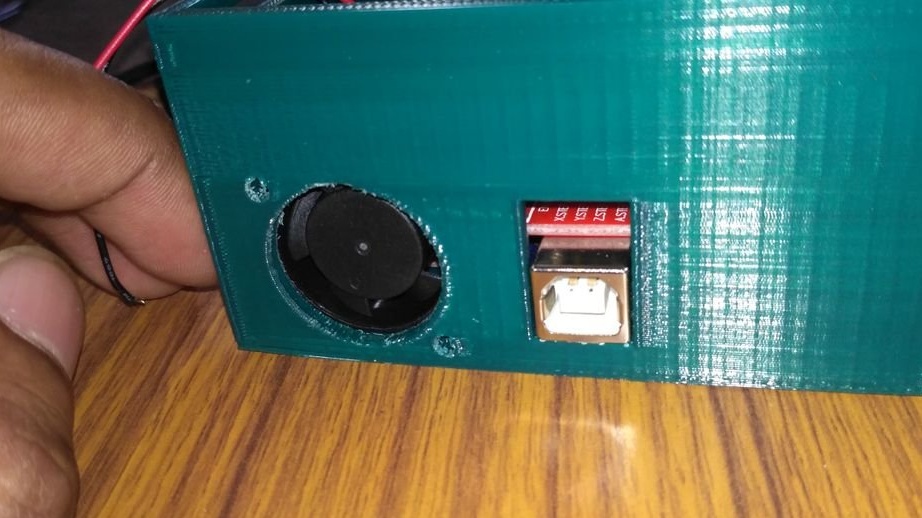
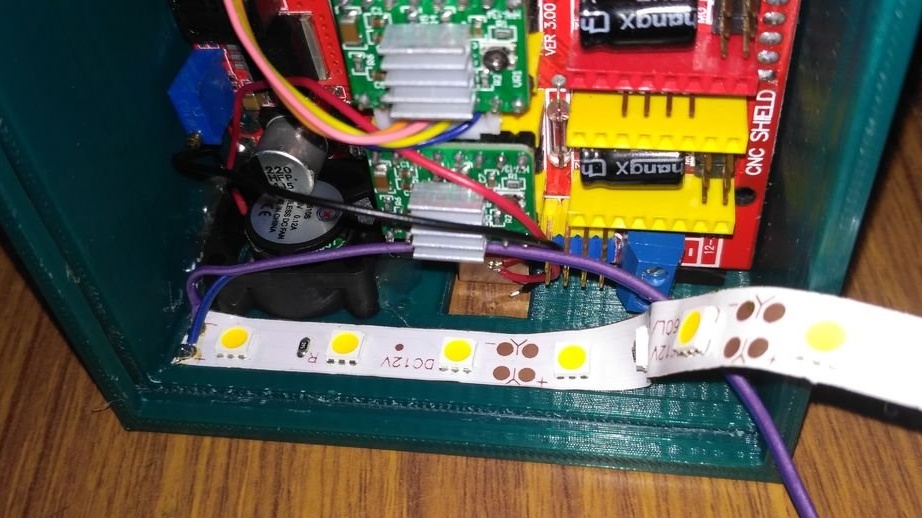
Puhallin liimataan tätä varten tarkoitettuun reikään kuumasulaliimalla.
LED-kaistale on lisätty sekä ulkoasun että virran ilmaisemiseksi.
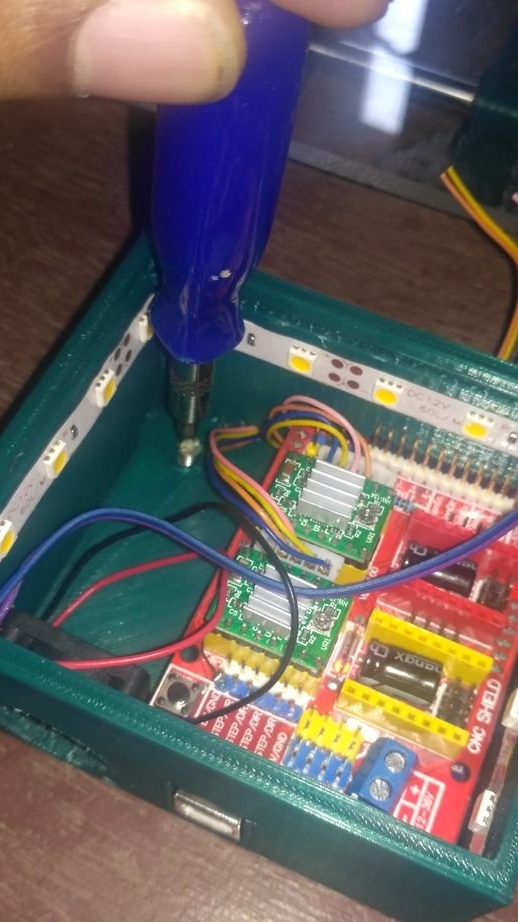
Painettu kotelo ruuvataan vaneriin.
Runkopeitteenä käytetään läpinäkyvää akryylilevyä 87 x 75 mm 2 mm paksu. Se voidaan työntää kotelon toisella puolella olevan uran läpi.
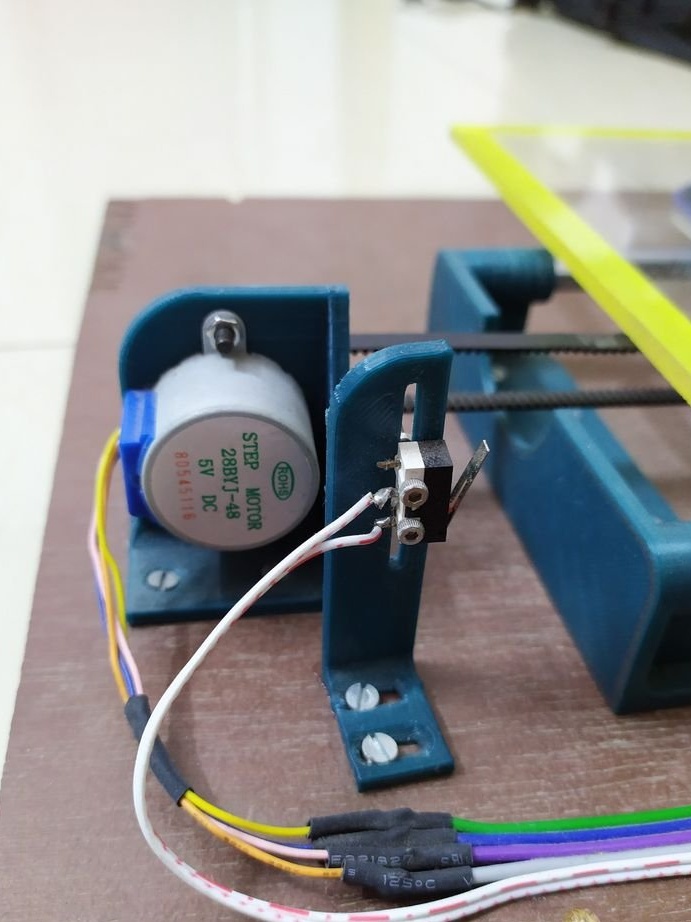
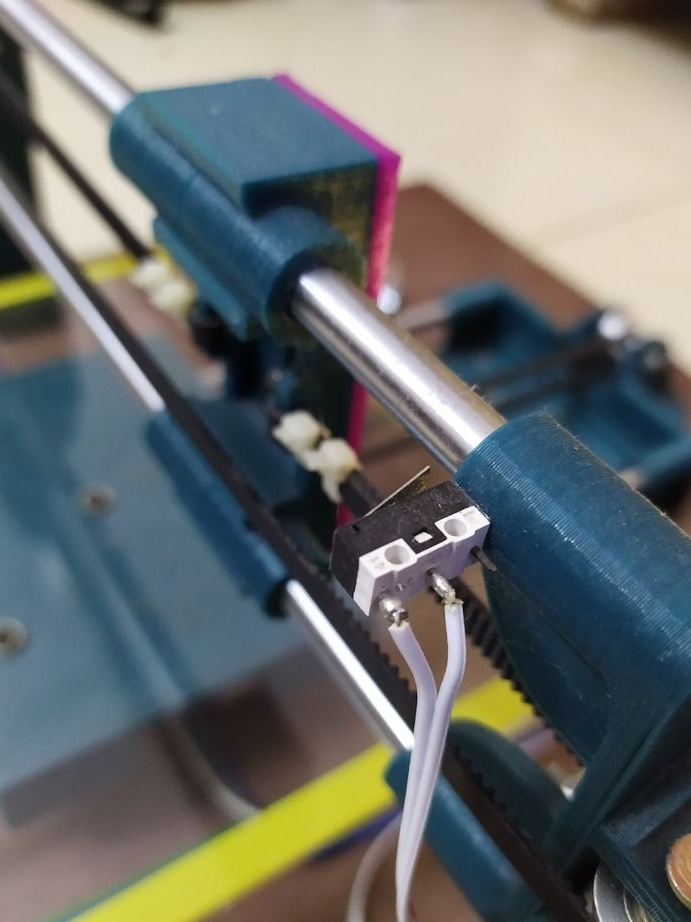
Rajakytkimet on kiinnitetty siten, että nappia painetaan 3 mm ennen kuin kunkin vaunun laakerit törmäävät pitopidikkeisiin.
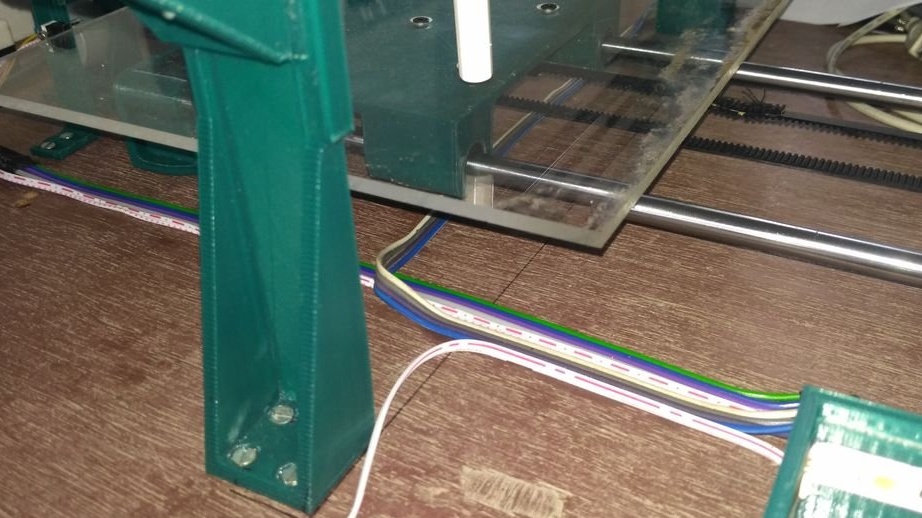
Moottorien ja rajakytkimien johdot ovat pitkänomaisia ja liitännät eristetty.

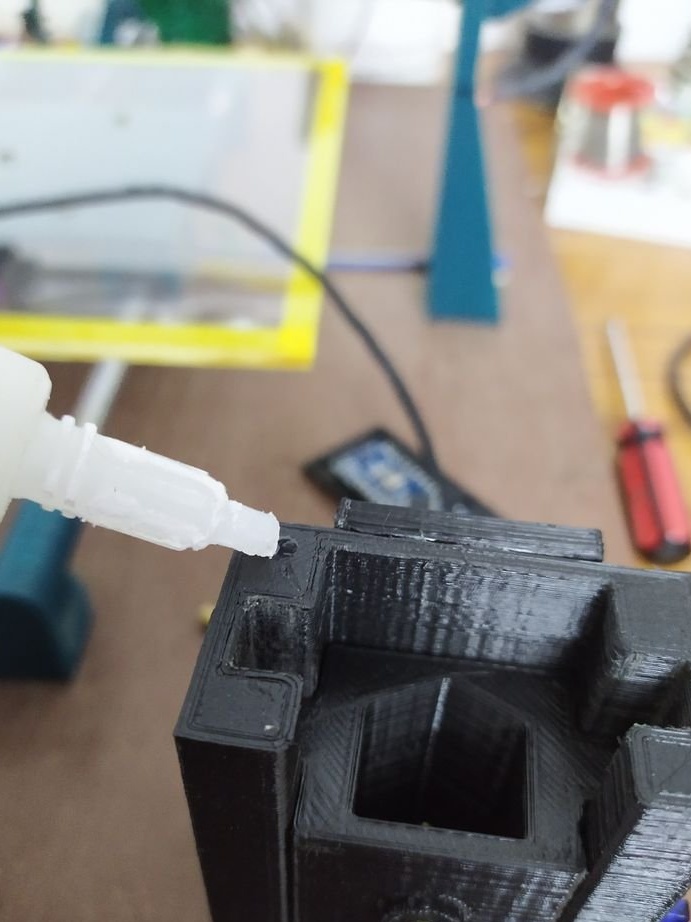
Langat liimataan vanerin pohjaan superliimalla.
Tätä varten lisäysmuuntajaa käytetään vain moottorin A4988-sirujen virran syöttämiseen. Jokainen moottori kuluttaa vain 150 mA virtaa.
Vaihe kolmetoista: Bluetooth-moduuli
Asentaa Bluetooth-moduulin.
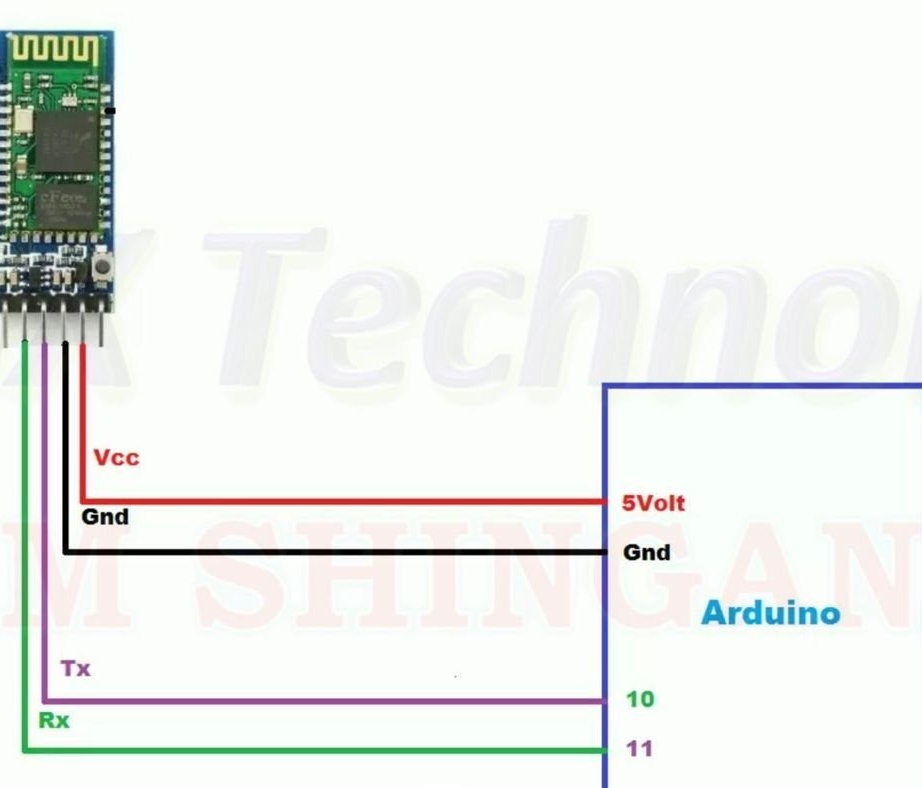
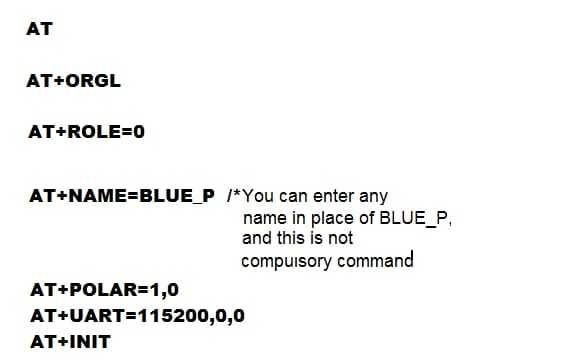
Jotta voit lähettää ja vastaanottaa tietoja tai tässä tapauksessa G-koodeja HC05 Bluetooth-moduulin kautta, sinun on ensin määritettävä moduuli.
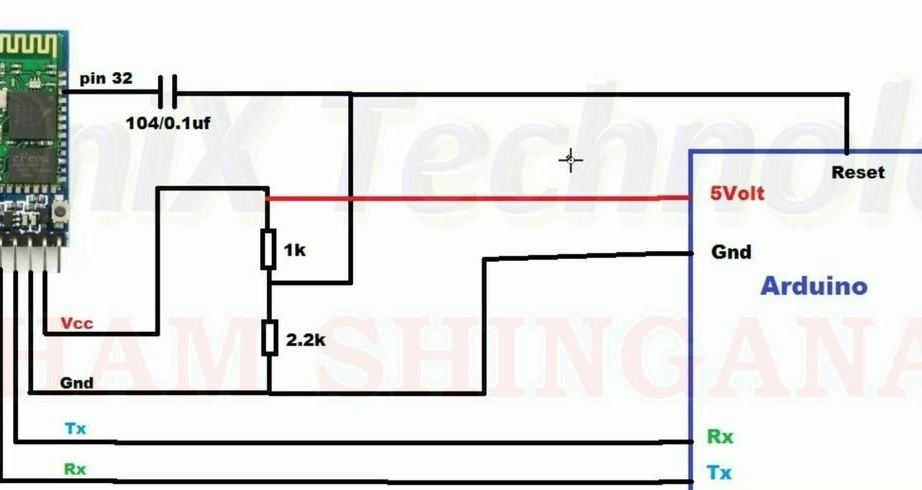
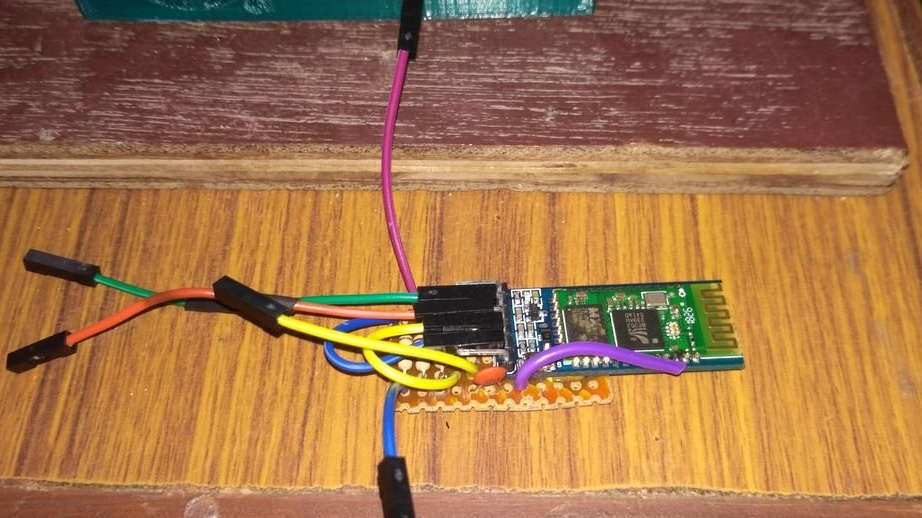
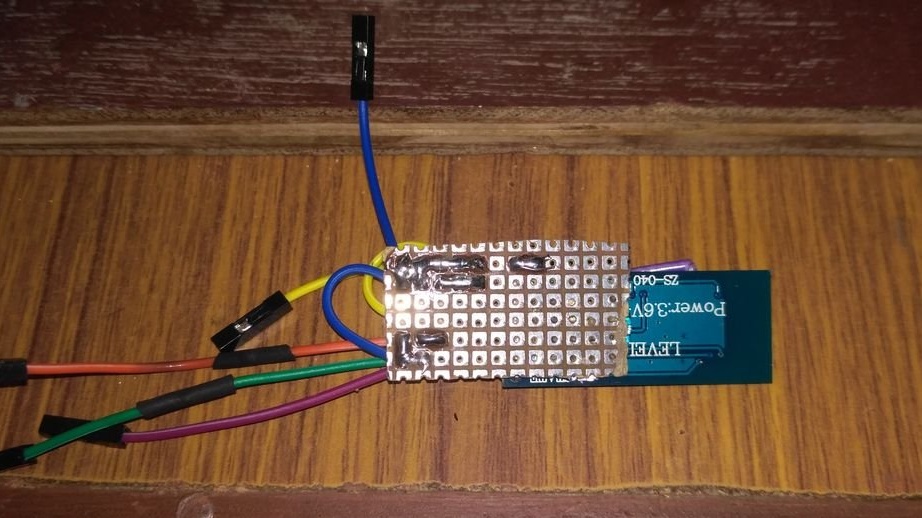
Kytke HC05-moduuli Arduino Unoon ensimmäisen kuvan osoittamalla tavalla.
Lataa tämän vaiheen liitteenä oleva koodi Arduinolle.
BLUE_P.ino
Kirjoita nyt toisessa kuvassa näkyvät koodit.
Kun olet suorittanut asetukset, irrota HC05-moduuli Arduinosta, jota käytit ohjelmointiin, ja kytke Arduino CNC-suojaan kolmannen kuvan piirikaavion mukaisesti.


Vaihe neljätoista: koodi ja asennus
Laserkaiuttimelle isäntä lataa koodin.
GRBL.zip
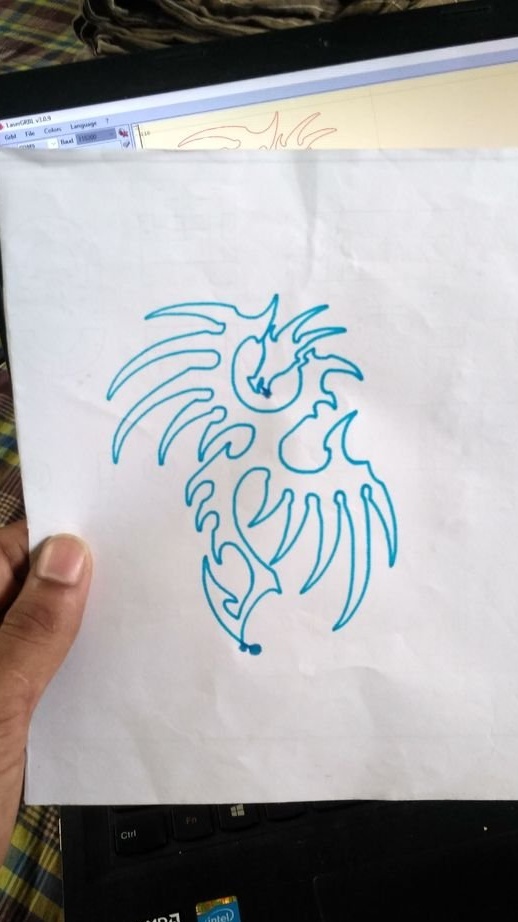
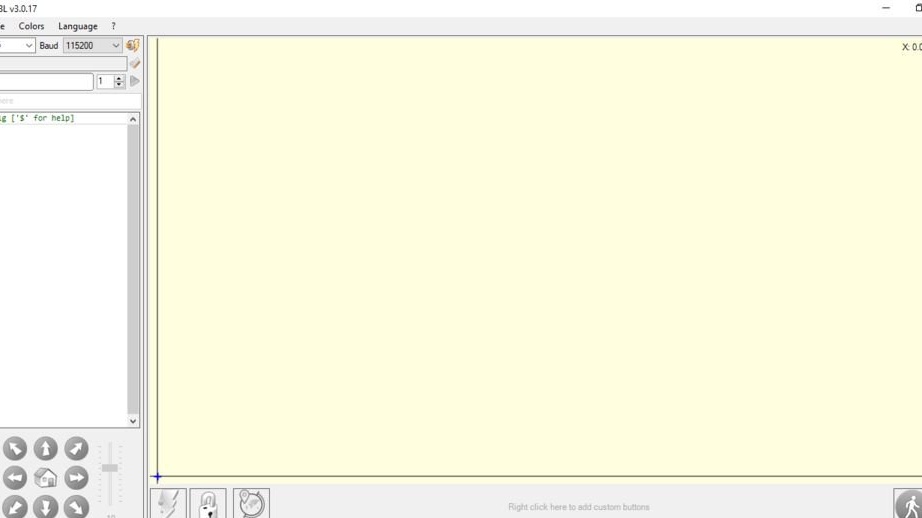
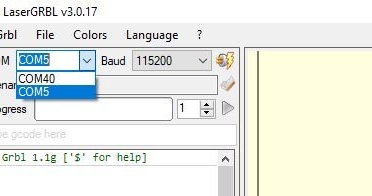
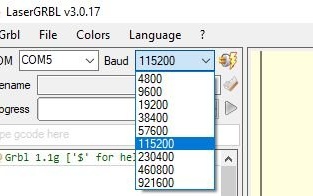
Laser GRBL on yksi parhaista ilmaisista G-koodin streamereista laser kaivertajille. Se voi siirtää G-koodeja suoraan Arduinolle som-portin kautta. Siinä on sisäänrakennettu työkalu kuvien muuntamiseksi G-koodeiksi.
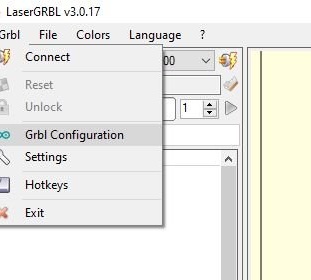
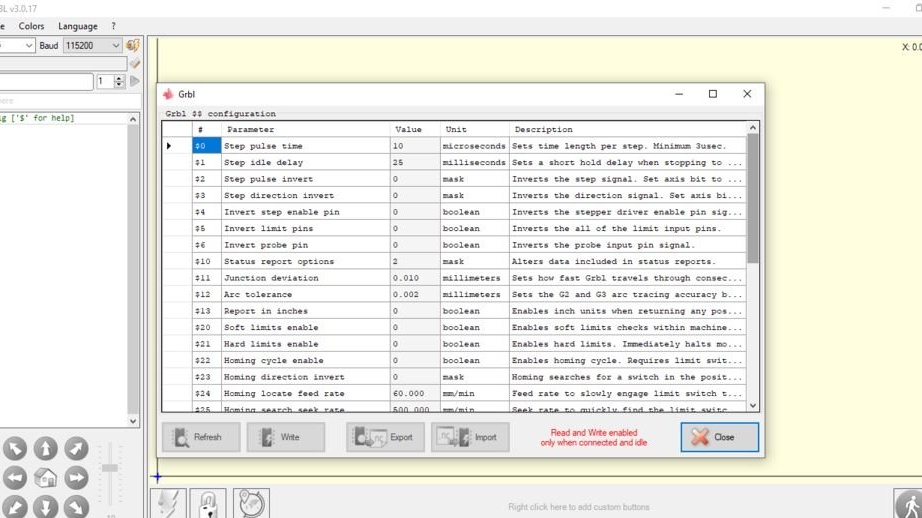
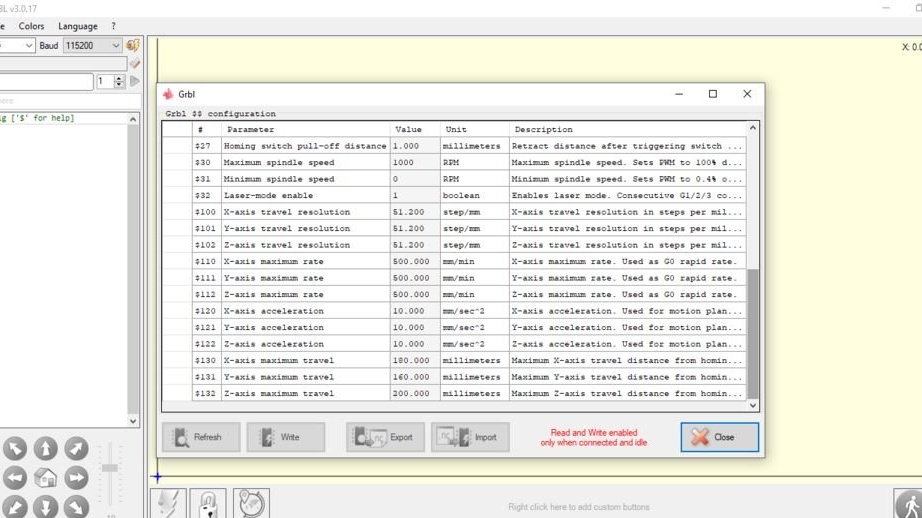
Kaikki asetukset on tehtävä kuten kuvassa, ottaen huomioon seuraavat:
Asenna monni-portti, johon laserkaiutin on kytketty.
Kokoonpanoarvoja voidaan muuttaa kaivurisi parhaiten sopiviksi.
Vaihe 15: Testaus
Kun laser on kytketty, on aika tarkistaa sen tarkkuus.
Tarkastellaan muutamia asioita:
Liikkuvatko X- ja Y-akselit oikeaan suuntaan?
Toimiiko asuminen oikein?
Hyppääkö moottori vaiheet korkean kitkan tai liian tiukkojen hihnojen takia?
Ovatko tulostettujen kuvakokojen mukaiset ohjelmistossa ilmoitetut koot. Vastaako askelmien lukumäärä millimetriä kohti käytettyä askelmoottoria.
Hihnan kireys voidaan säätää kiristimellä. Käännä pulttia, kunnes oikea kireys on saavutettu.
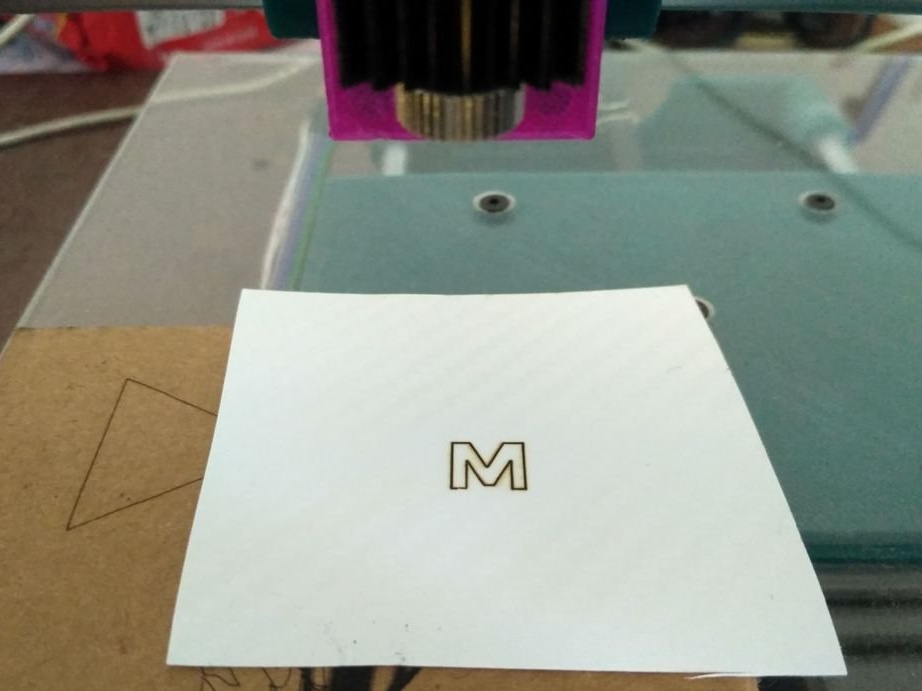
Tarkista, onko moottorilla portaita ja oikeat mitat, tulostamalla yksinkertainen jatkuva geometrinen kuva, esimerkiksi neliö, kolmio tai ympyrä. Jos laser käynnistyy yhdestä kohdasta ja pysähtyy ihannetapauksessa samaan kohtaan, tämä tarkoittaa, että laser ei ole ohittanut yhtä vaihetta ja toimii täydellisesti. Kun kolmio tai neliö on painettu, mittaa sen koko manuaalisesti viivalla ja tarkista, vastaako se määrittämiäsi mittoja.

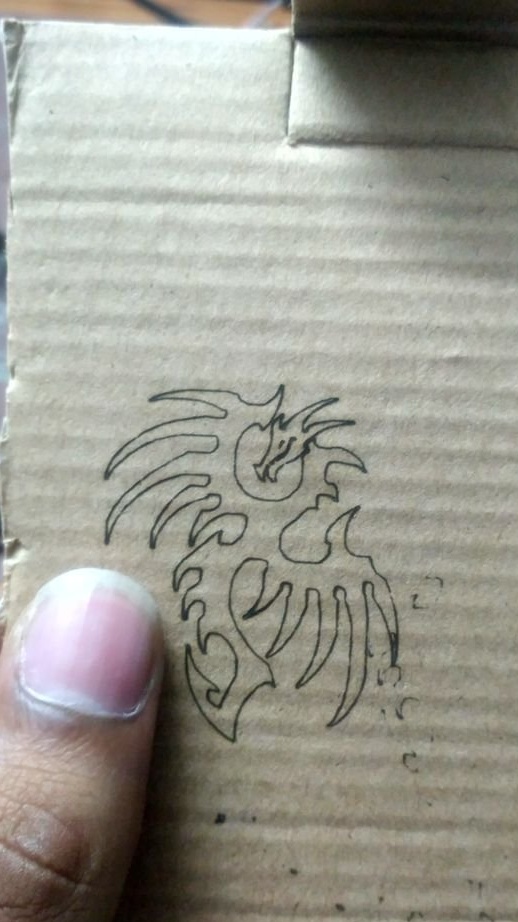
Mestarin mukaan hän on täysin tyytyväinen koneeseen.
Voidaan kaivertaa useille materiaaleille, kuten puu, pahvi, nahka, muovi jne.
Koska moottorilla oli noin 102 askelta / mm, voidaan tehdä pieniä kaiverruksia, joissa on hienoja yksityiskohtia.
Kaivertaja toimi ilman ongelmia USB-virtalähteessä.