Mestari kokosi tämän jyrsinkoneen pääasiassa käytettävissä olevasta materiaalista.
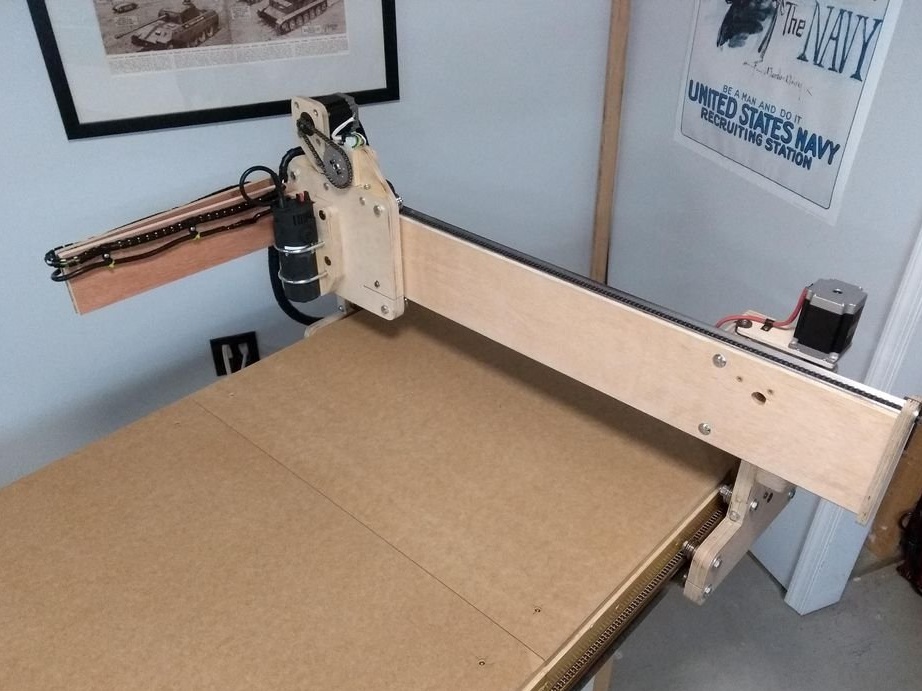
Tämä on klassinen kolmiakselinen jyrsin. Siinä on portaali, joka liikkuu kannan pituutta (Y-akseli) pitkin. On kelkka, johon reititin on asennettu, ja se liikkuu edestakaisin (X-akseli). Ja siellä on mekanismi, joka nostaa ja laskee reititintä ylös ja alas (Z-akseli). Liikkeessä päällikkö käyttää askelmoottoreita ja ketjuja. Lineaarisissa kiskoissa käytetään teräs V-laakereita, jotka ulottuvat teräskulman yli. Ohjattu toiminto ei anna yksityiskohtaisia ohjeita, vaan vain yleisen konseptin ja ideat.
Työkalut ja materiaalit:
- Yöpöytä;
ovinen;
-Roliki;
-Metallinurkka;
-Fanera;
-Krepezh;
-Drel;
Jyrsin;
-Pila;
näkö-;
-ketjun;
-Kierrelanka;
-Step-moottorit;
-Zvezdochki;
-Podshipniki;
-Pölynimurin sovitin;
-Arduino;
- Estlcam-ohjain;
- puolijohderele;
-Virta;
-Vaiheen ohjaimet;
Vaihe yksi: Taulukko
Mestari redidi pöydän vanhasta yöpöydästä. Työtasona mestari naulasi puisen oven pöydälle. Alla olivat asennetut telat.



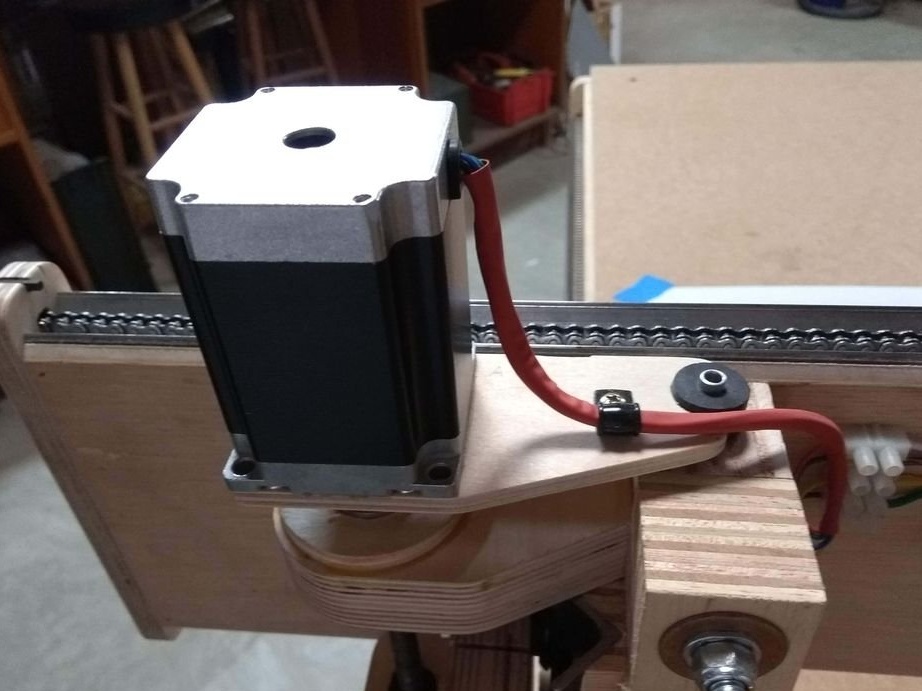
Vaihe toinen: Kiskot
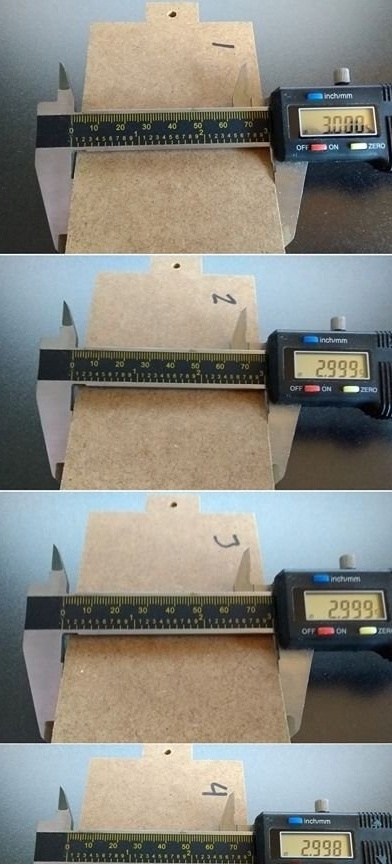
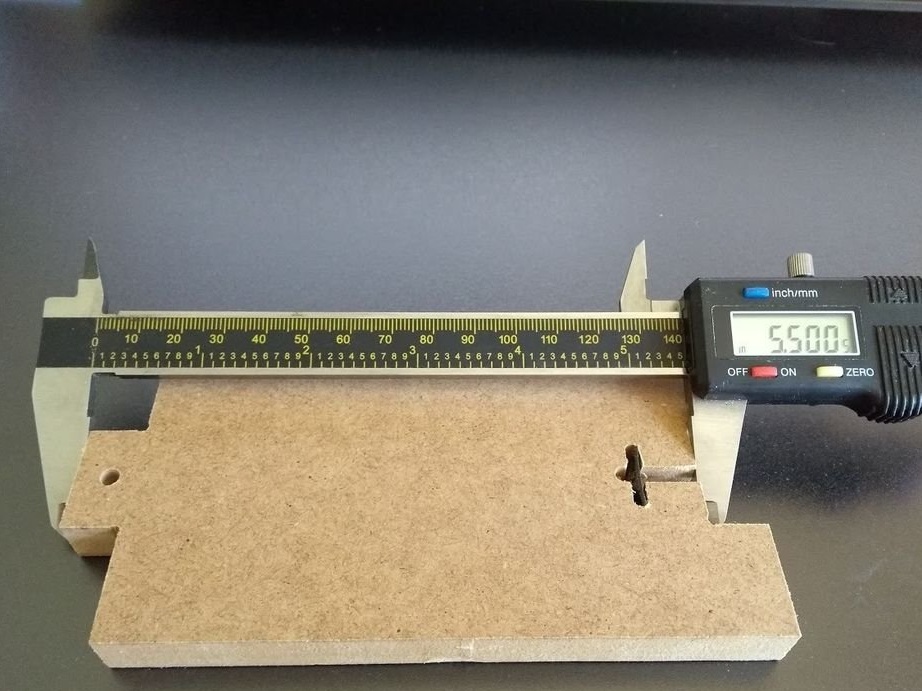
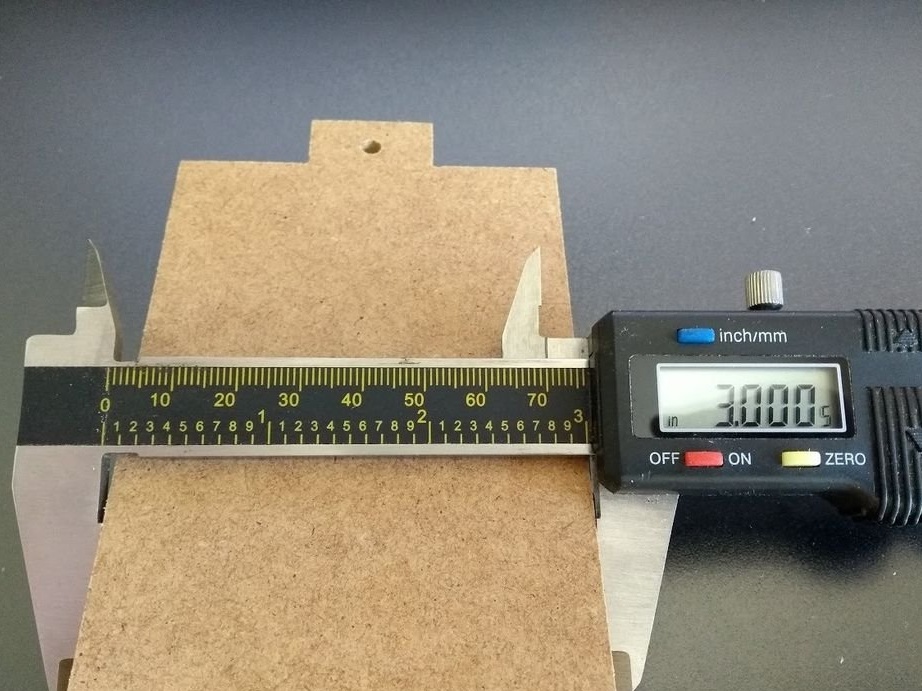
Mestari käyttää metallinurkkaa ohjeena. Vaneri-aihion päällikkö kiinnittää neljä laakeria uralla. On selvää, että kulma on kiinnitetty pöydän molemmille puolille.




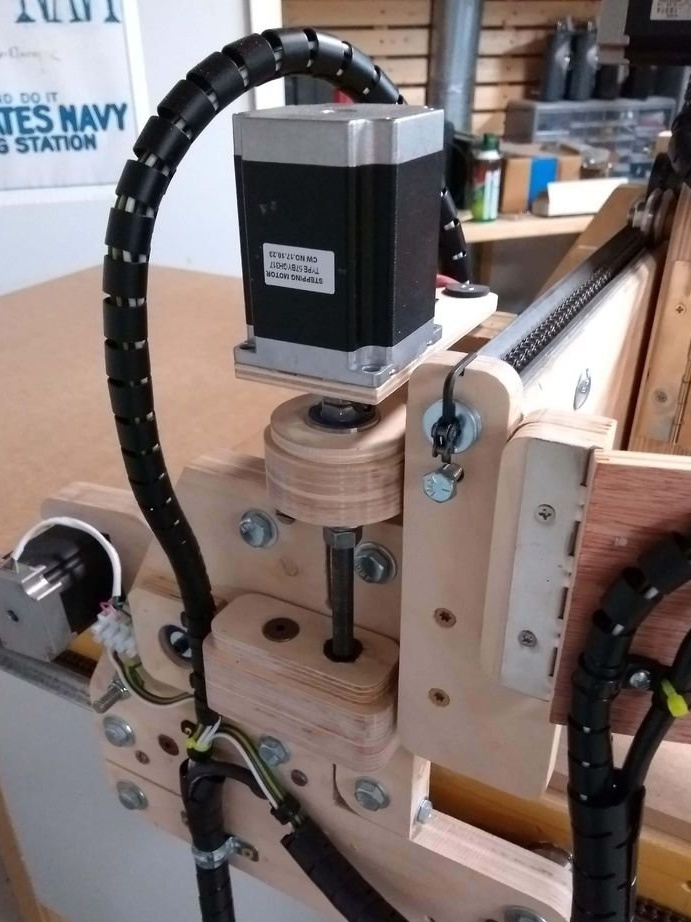
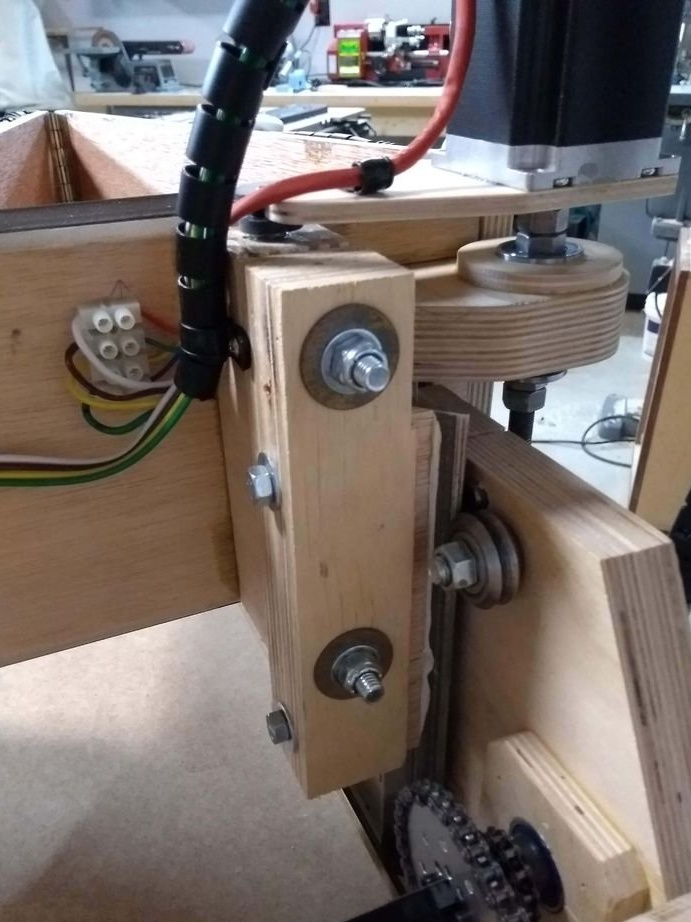
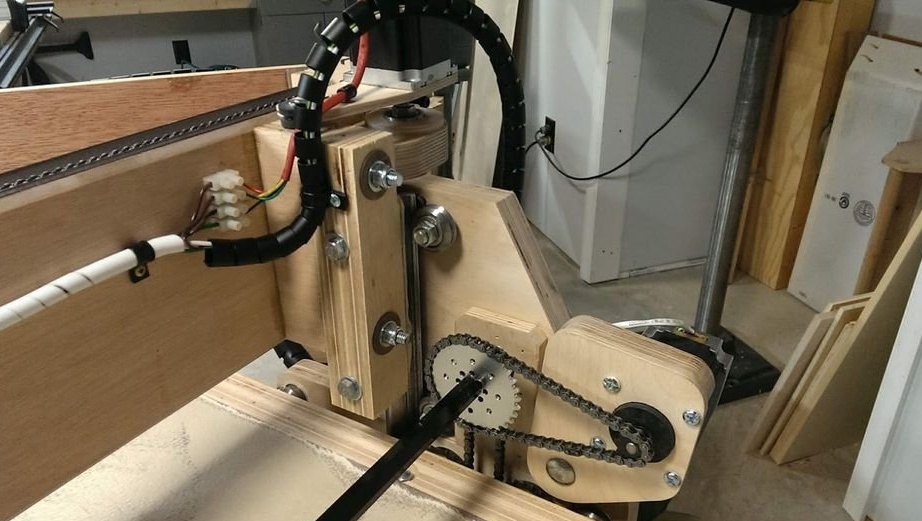
Vaihe kolme: Portaali
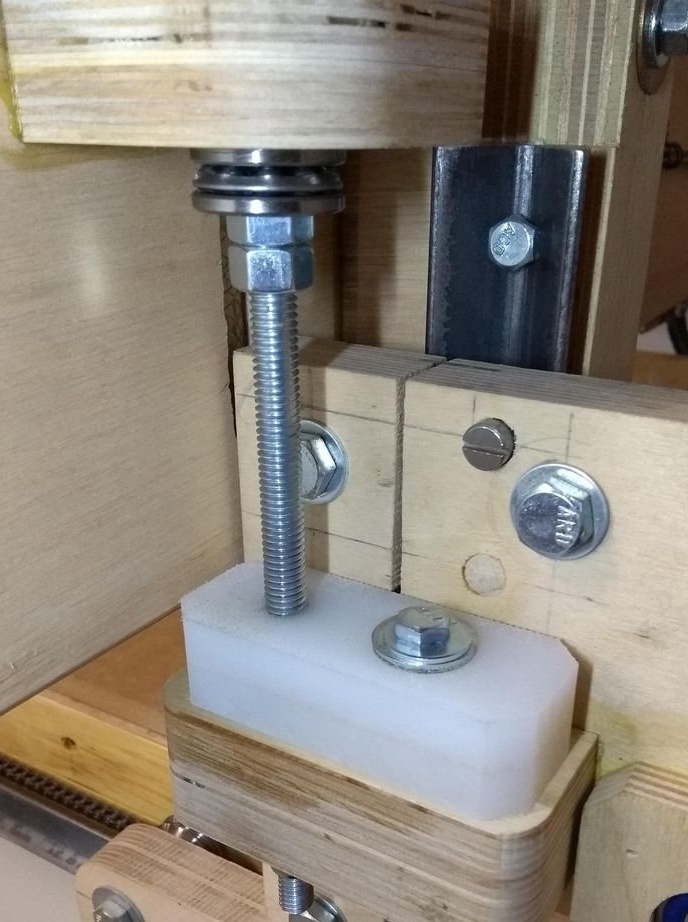
Portaali on rakennettu kahdesta vanerikerroksesta, jotka on liimattu yhteen. Jyrsin on asennettu portaalin poikittaisosaan. Poikittainen osa yhdessä jyrsimen kanssa liikkuu ylös / alas samoja kiskoja pitkin kuin edellisessä vaiheessa. Kaksi askelmoottoria on asennettu liikkumaan reunoja pitkin. Päällikkö kiinnitti pitkät pultit moottorien akseleihin. Alaosassa on solmu muttereilla. Komennolla moottorit alkavat toimia, akselit pyörivät ja jyrsin putoaa tai nousee.
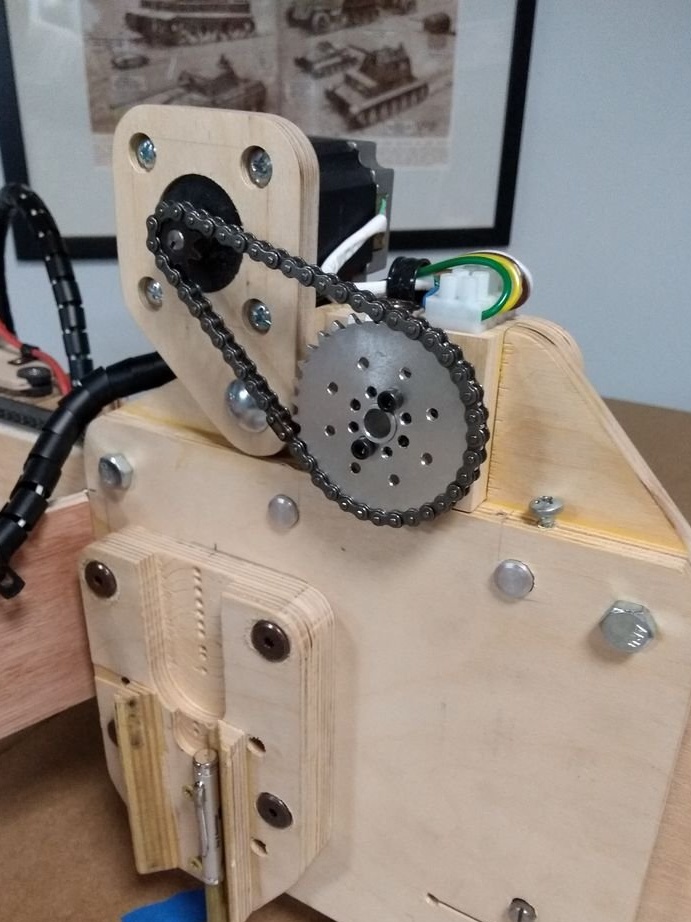
Vaunun siirtämiseksi tehtaan ollessa Z-akselilla isäntä käyttää askelmoottoria ja ketjuvaihteistoa.





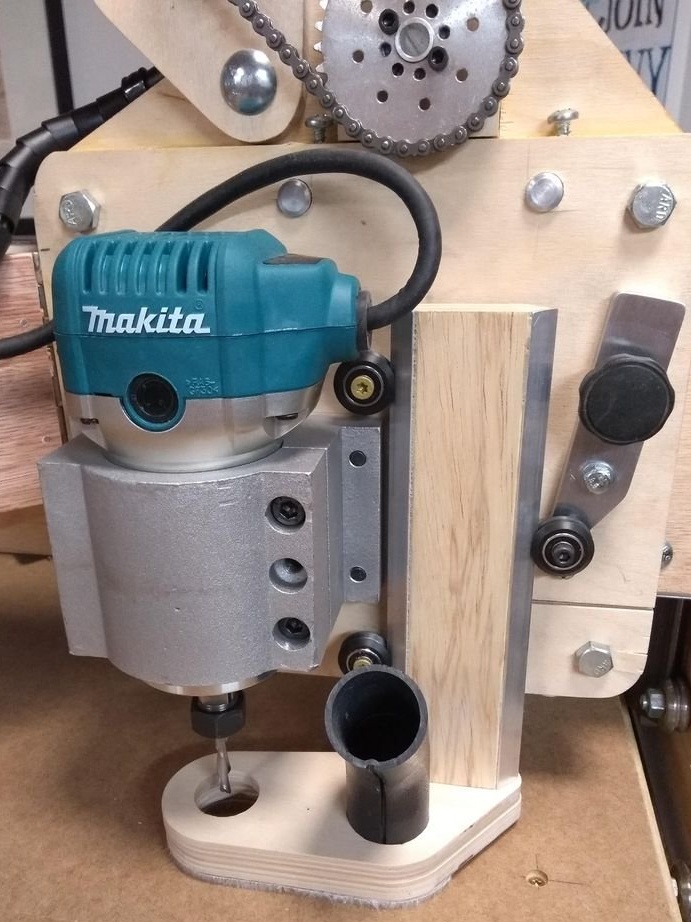
Vaihe neljä: Jyrsin
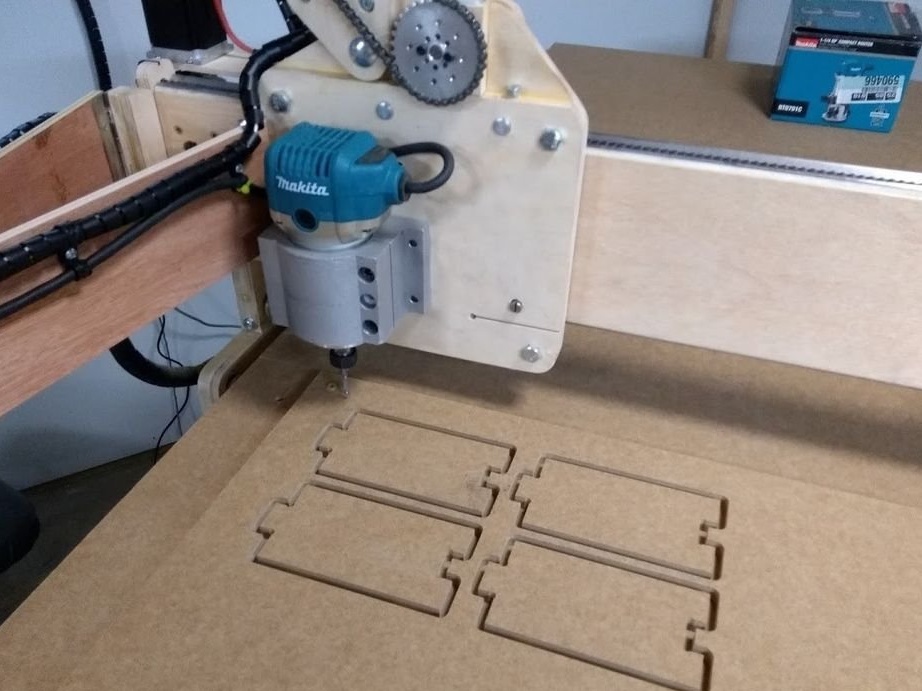
Makita RT0701C -reititin on asennettu koneeseen. Päällikkö asentaa myös sovittimen imurin letkujen kytkemistä varten.



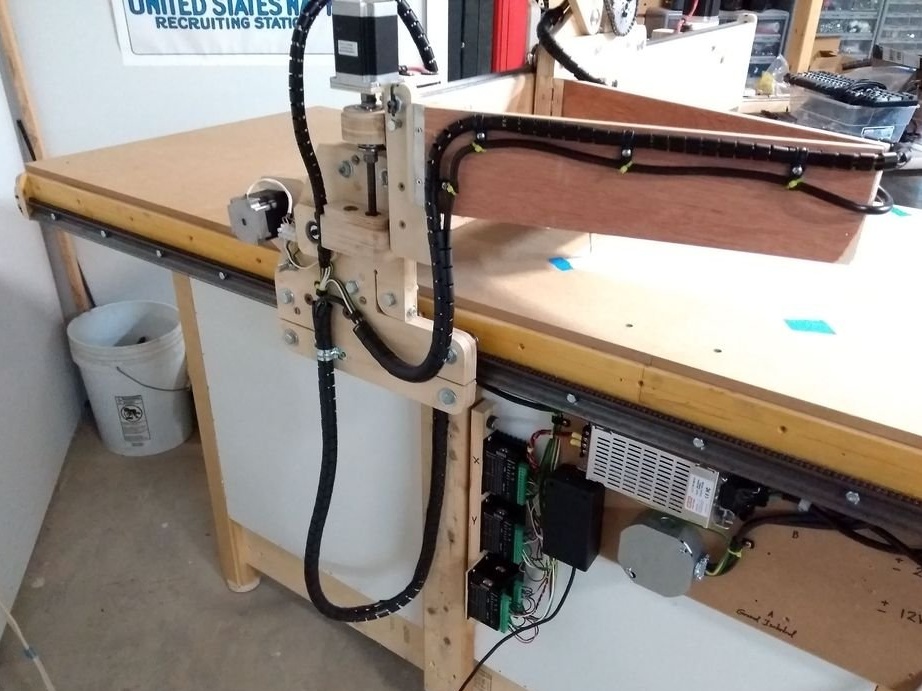
Vaihe viisi: hallinta
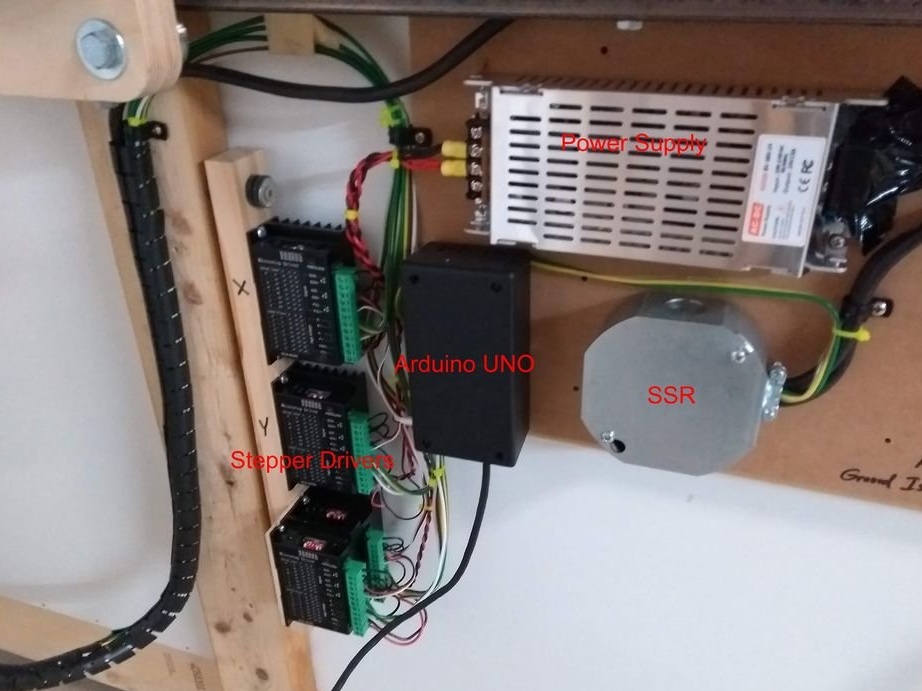
Johtamisjärjestelmä perustuu Työläs UNO ja pieni tietokone EstlCAM CNC -ohjelmistolla.
Arduino Uno on asennettu koneen takaosaan ja tukee Estlcam-ohjainohjelmistoa. Sähkökotelo sisältää 10A SSR (Solid State Relay), joka kytkee reitittimen päälle ja pois päältä. Vasemmalla puolella TB6600-askelmoottorit ja 24 V, 15 A: n virtalähde. Moottorien johdot kulkevat aallotuksen läpi. Windows 10 -tietokone näyttää kuvan näytöllä, ja sitä ohjataan langattomalla hiirellä ja näppäimistöllä.

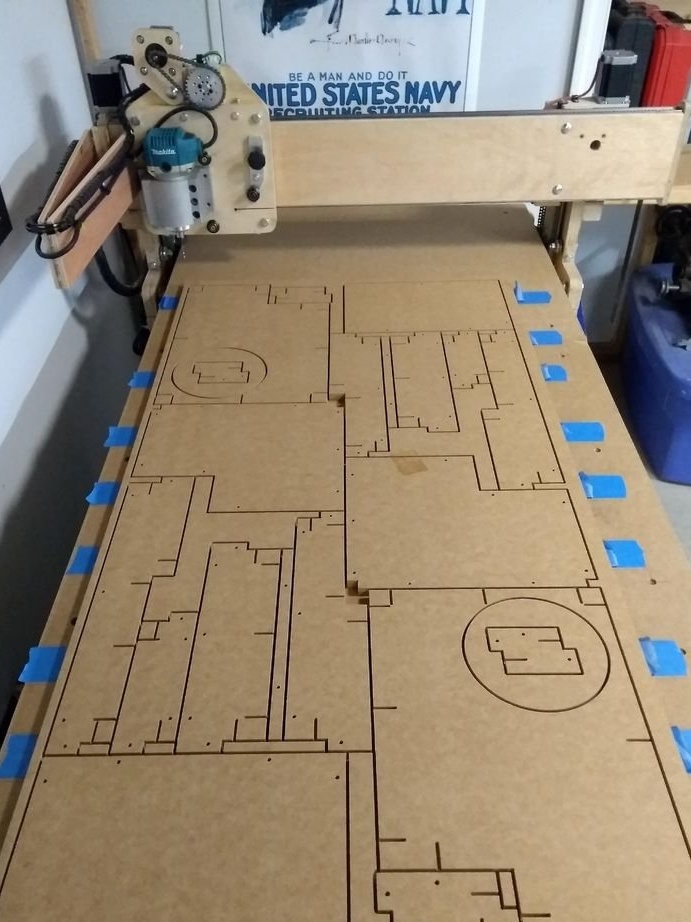
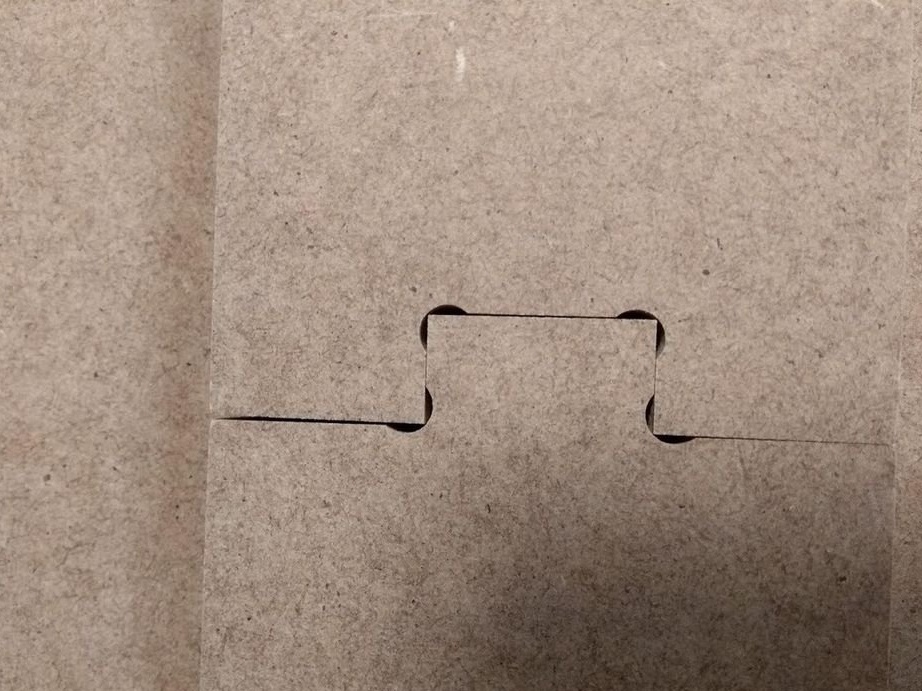
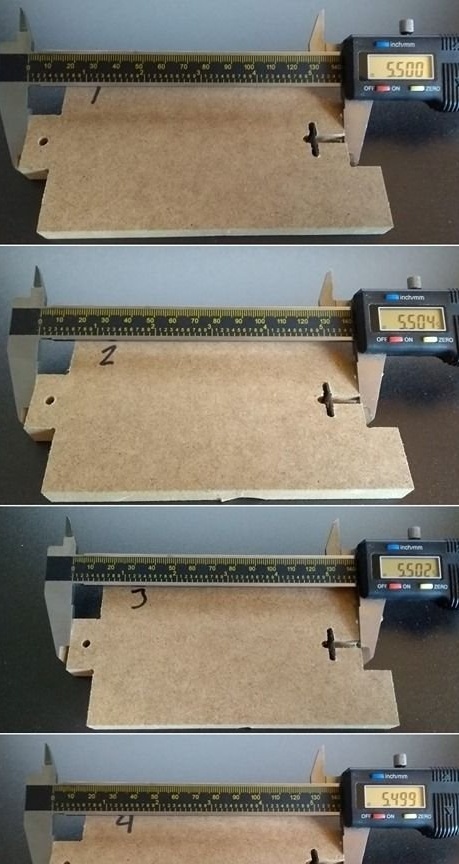
Mestarin mukaan kone osoittautui aivan normaaliksi, viimeisessä kuvassa on esimerkkejä koneen toiminnasta.