
Olen viime aikoina rakentanut kymmeniä robotteja, lähinnä BEAM-robotiikan ihmeiden innoittamana. Jos et ole perehtynyt tähän tekniikkaan, BEAM on erityinen menetelmä robottien rakentamiseen painopisteellä B - biologia, E - elektroniikka (elektroniikka), A- estetiikka (estetiikka) ja M - mekaniikka (mekaniikka). Tämä on lyhenne BEAM. Se, mikä erottaa tämän tekniikan muista lähestymistavoista, on vain säteilyenergian käyttö ravinnoksi (pääasiassa aurinkoenergiaa), erilaisten materiaalien hävittäminen (uudelleenkäyttö) ja minimalismi. Vaikka olenkin omaksunut nämä periaatteet robotit eivät olleet aivan BEAM-hengessä (he saavat virtansa akusta).
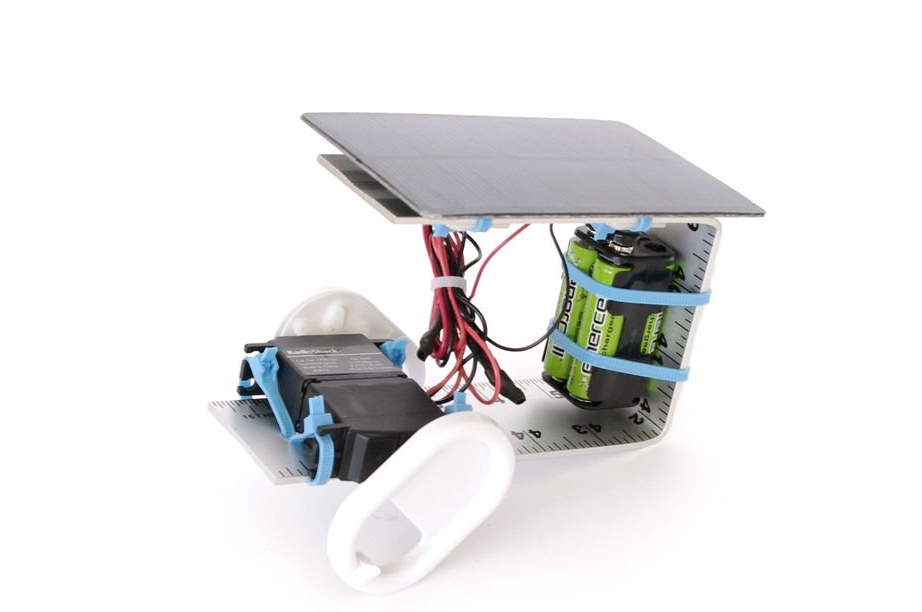
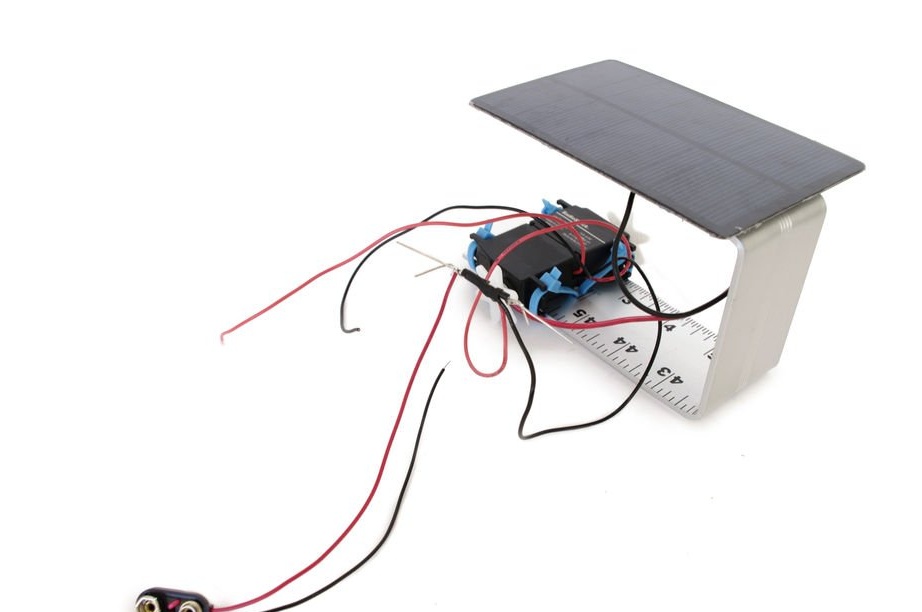
Koska BEAM -robotiikka inspiroi minua vakavasti, halusin tehdä aurinkoenergialla toimivan robotin. Mutta sen sijaan, että valmistaisin vain palkkirobotin, päätin integroida aurinkopaneelin tavalliseen tyyliini kuuluvaan robottiin. Auringon täyden virran sijasta päätin rakentaa ladattavat paristot. Toisin sanoen robotti voi saada virtansa joko akusta tai aurinkopaneelista riippuen siitä, mikä virtalähde on tällä hetkellä tehokkaampi. Aurinkopaneeli lataa myös akut, kun auringonvalo osuu siihen. Tämän avulla robotti voi liikkua sekä valossa että varjossa.
Mielestäni tämä lähestymistapa yhdistää onnistuneesti kaksi tyyliä, ja tämä on mielenkiintoinen kokeilu robottien rakentamisessa.
Vaihe 1: Materiaalit
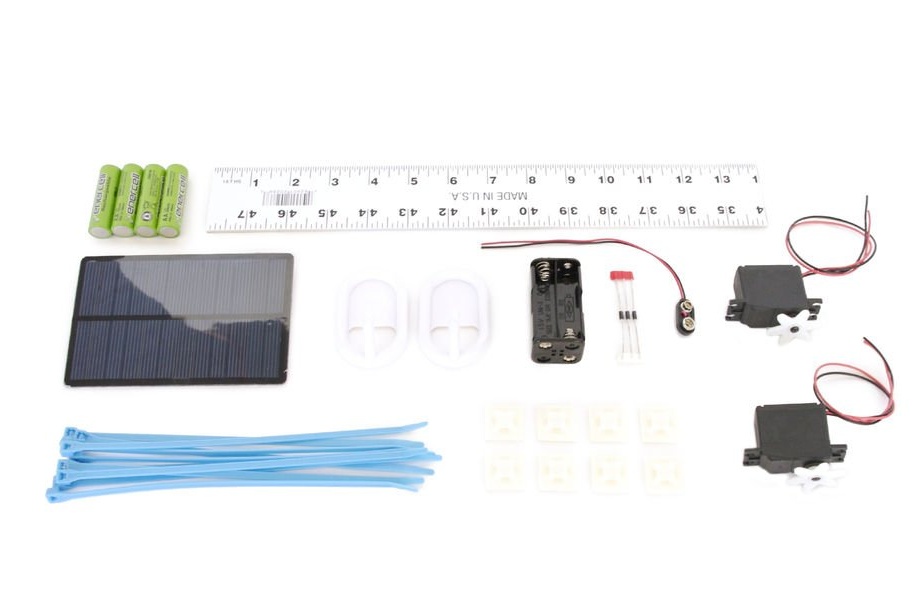
Tarvitset:
(x1) Aurinkopaneeli
(x2) Vakiovirran moottorit
(x3) Schottky-diodit 1N5817 - NTE578-ekvivalentti
(x1) 9 V akku
(x8) ladattavat AA-paristot
(x1) 8 x AA -akku
(x12) kiinnittimien jalusta
(x1) Viivain (30-50 cm)
(x2) Seinälle kiinnitettävät liimakoukut
(x1) Muoviset puristimet
(x1) lämpö kutisteputket
Vaihe 2: Muokkaa servoa

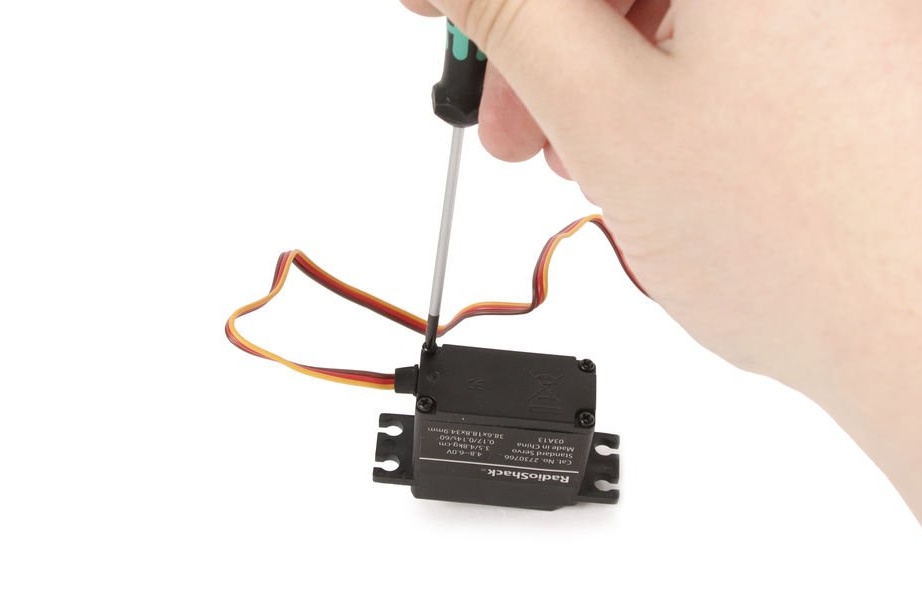
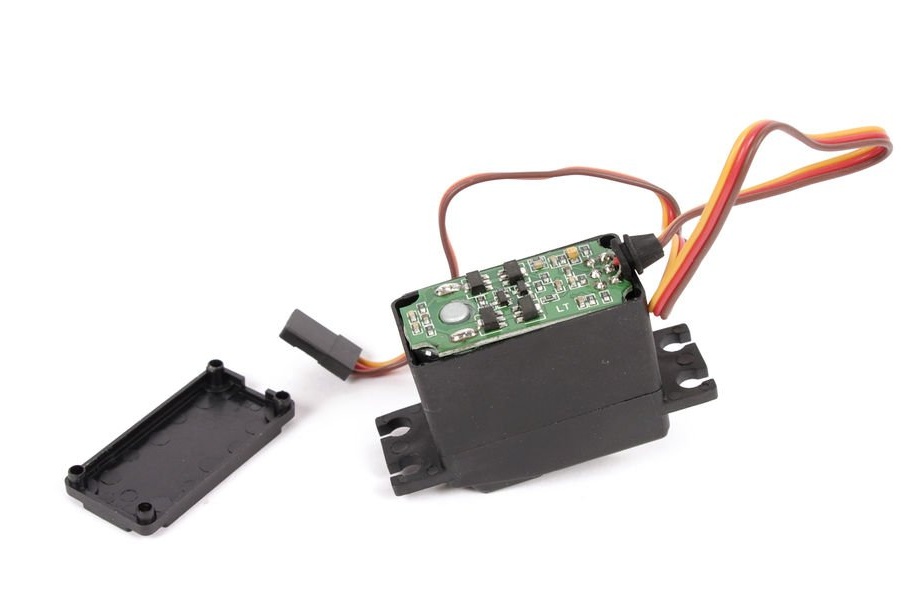
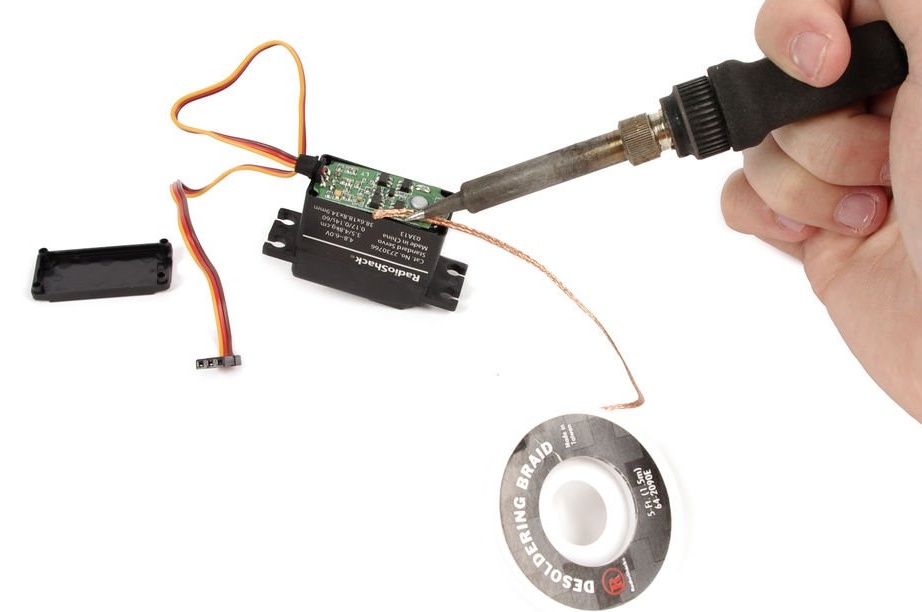
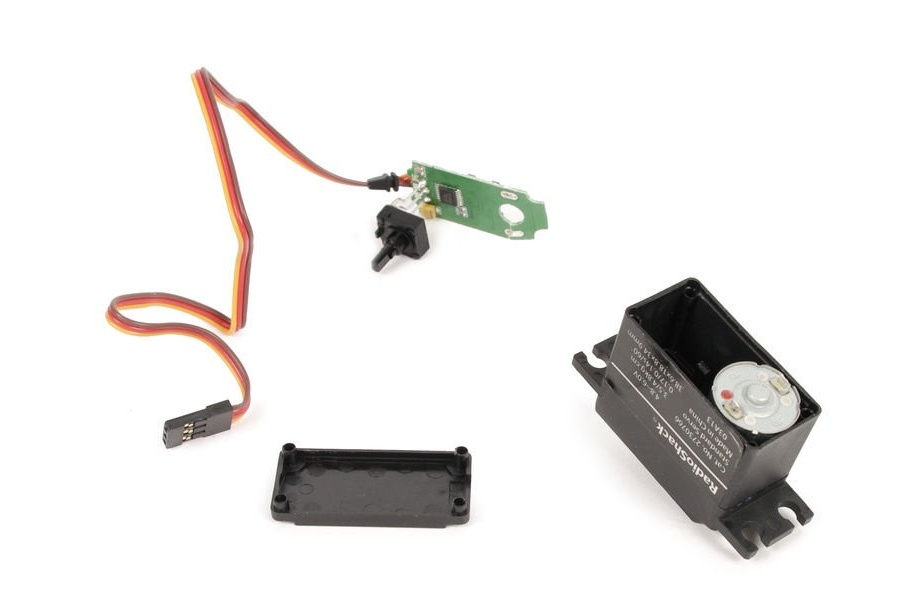




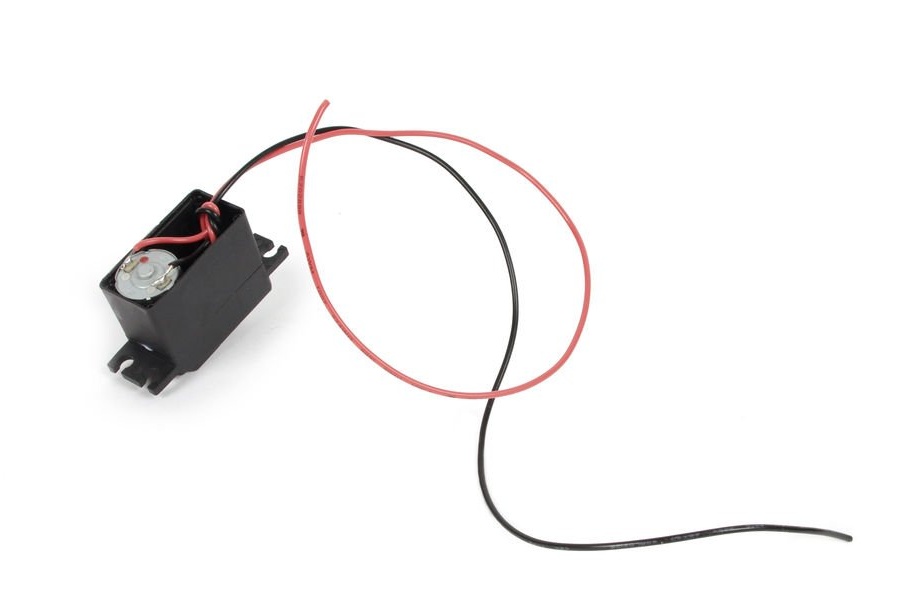
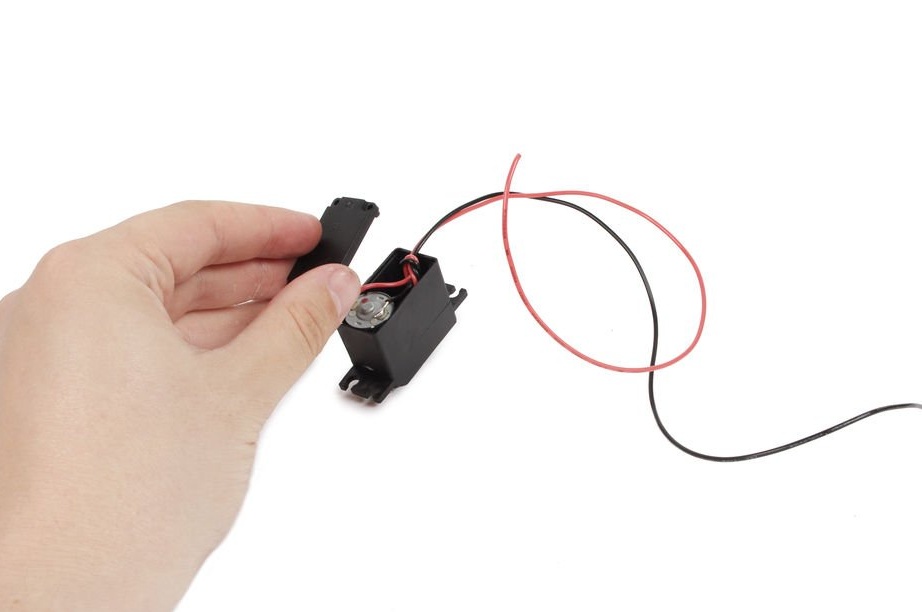

Avaa servopesä ruuvaamalla irti 4 ruuvia alapaneelissa. Pura kortti sisällä ja kytke punainen ja musta johdotus taajuusmuuttajan jokaiseen napaan.
Avaa vaihde ja löydä vaihde pienellä muovisella korkilla, joka estää jatkuvaa pyörimistä. Leikkaa korkki vaihdeesta.
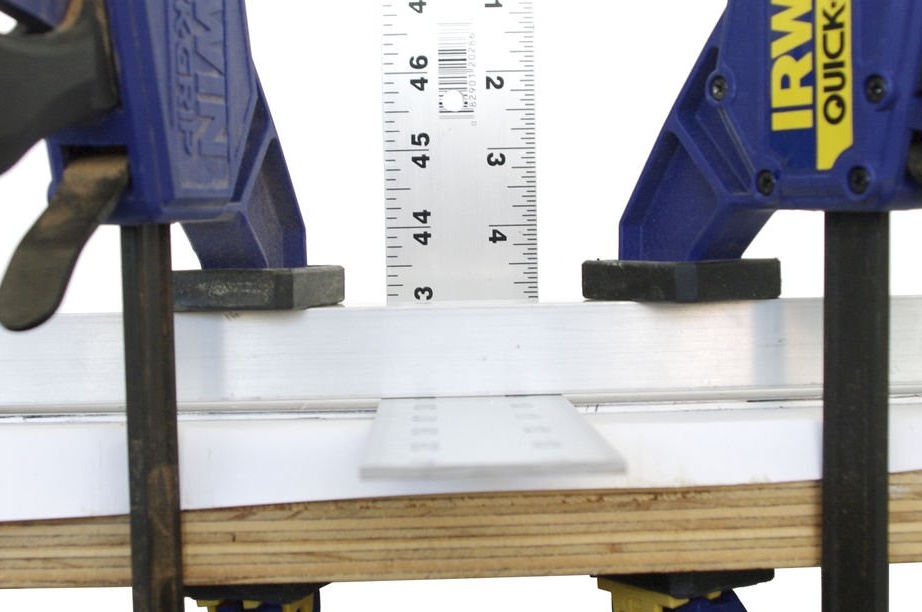
Vaihe 3: Poraa
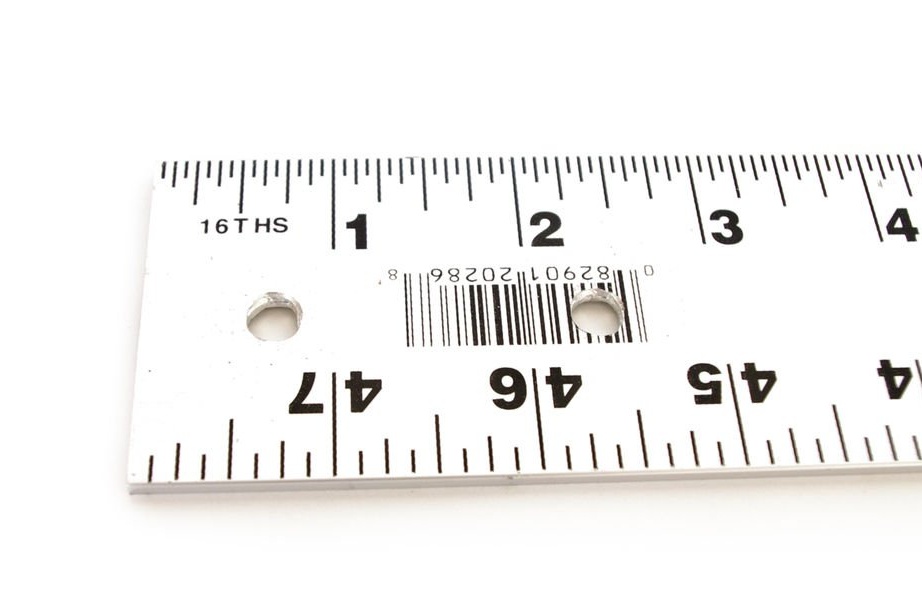


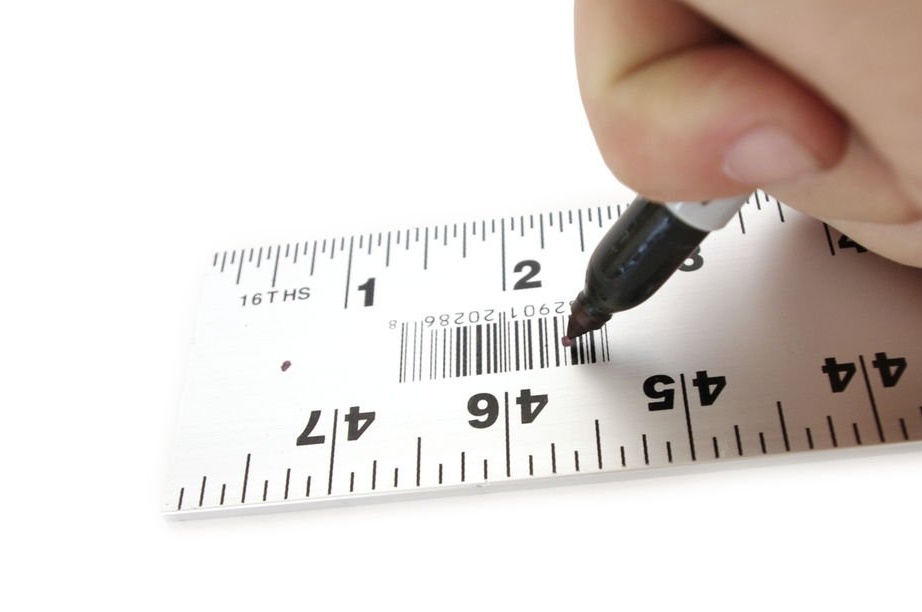
Poraa neljännestuumainen (6,3 mm) reikä viivaimen keskelle, noin 15 mm päässä lyhyestä reunasta. Poraa toinen reikä noin 60 mm samasta reunasta.
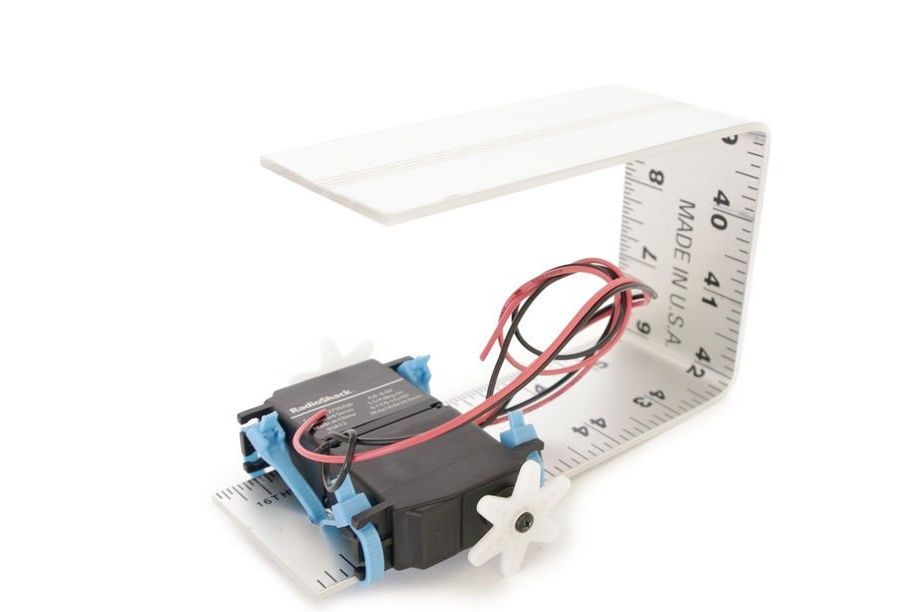
Vaihe 4: Taivuta

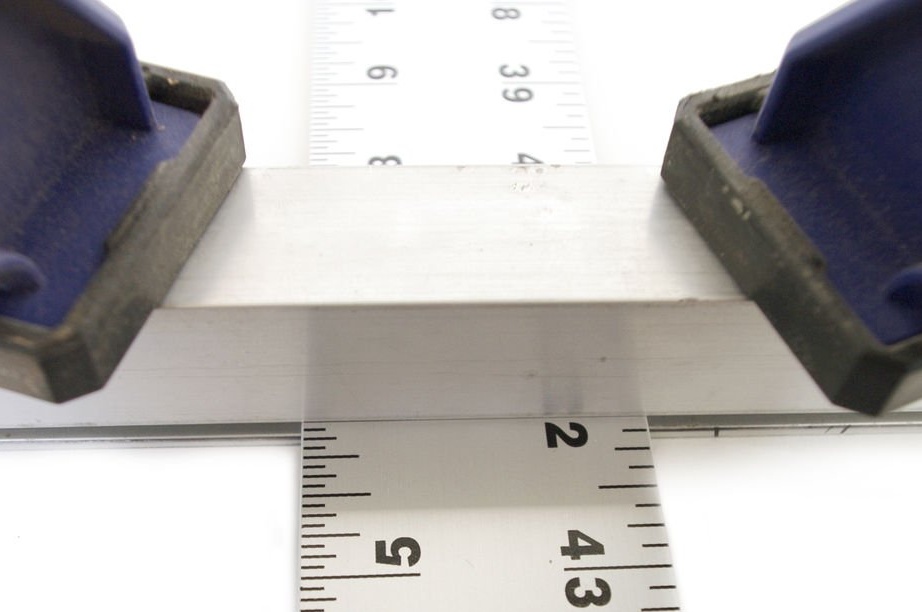
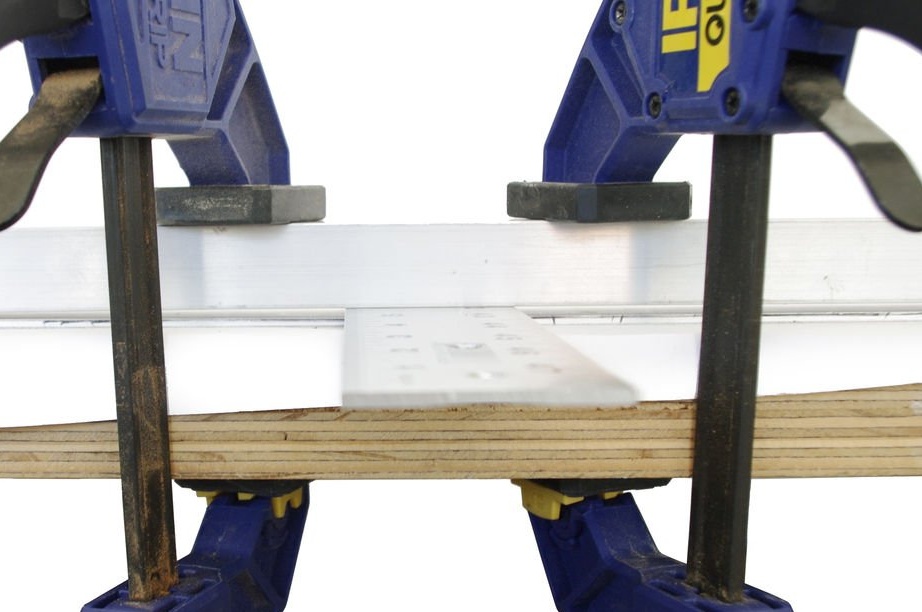


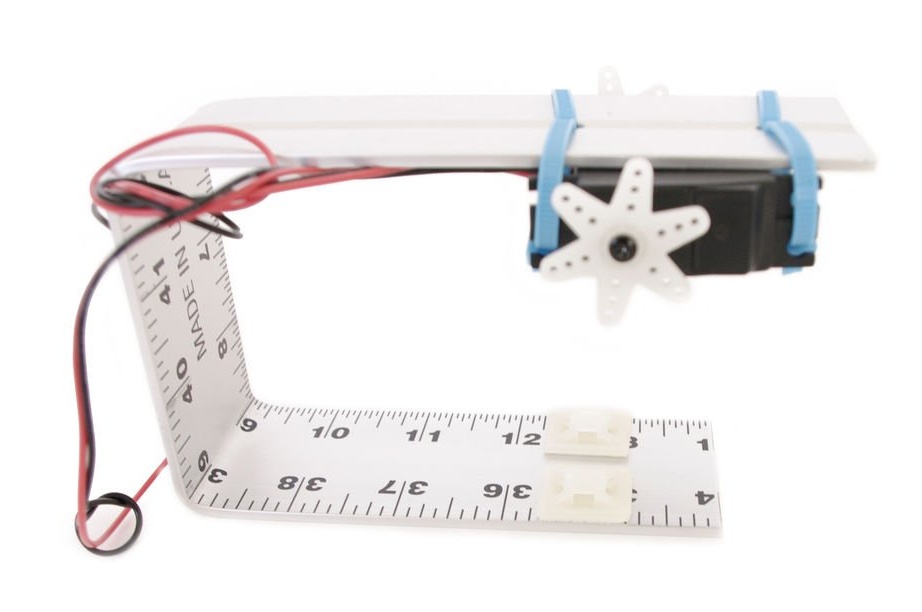
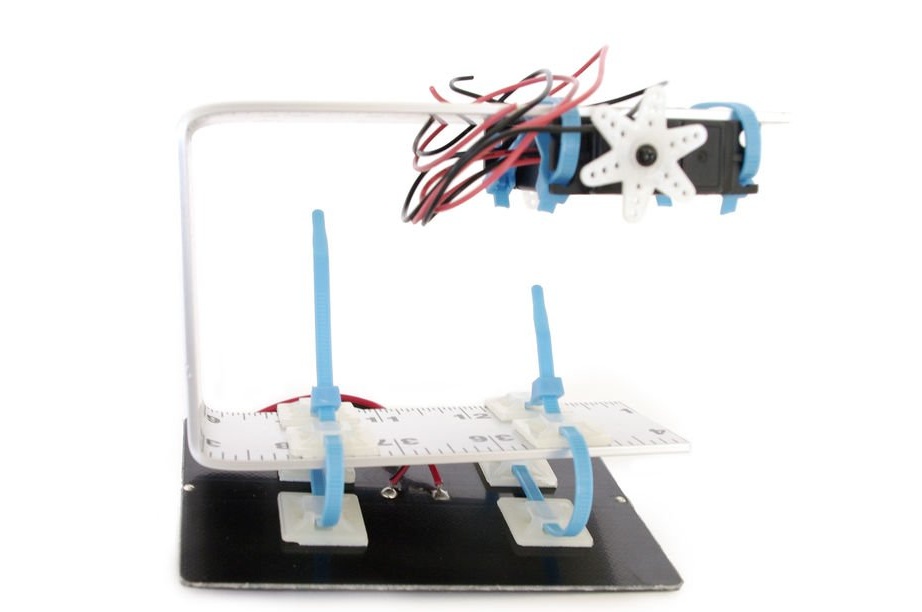
Taivuta viivainta 90 asteen kulmassa 15 cm: n etäisyydellä reunasta, johon reikät porattiin, käyttämällä viseä tai kahta pöytäreunaan kiinnitettyä metallilevyä.
Tee sama mutka 90 asteen kulmassa 15 cm etäisyydeltä toisesta reunasta. Saat kuvan P-kirjaimen muodossa.
Vaihe 5: Yhteys

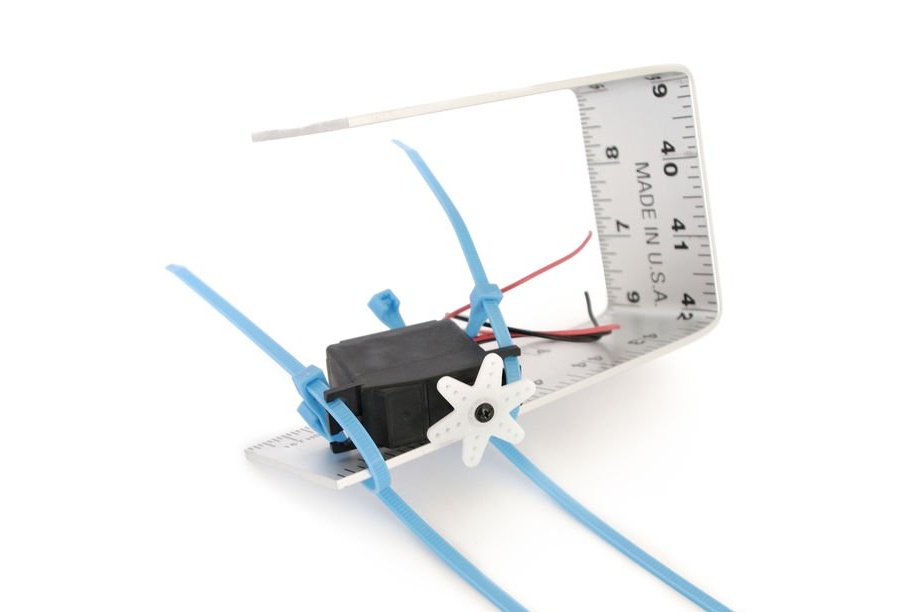
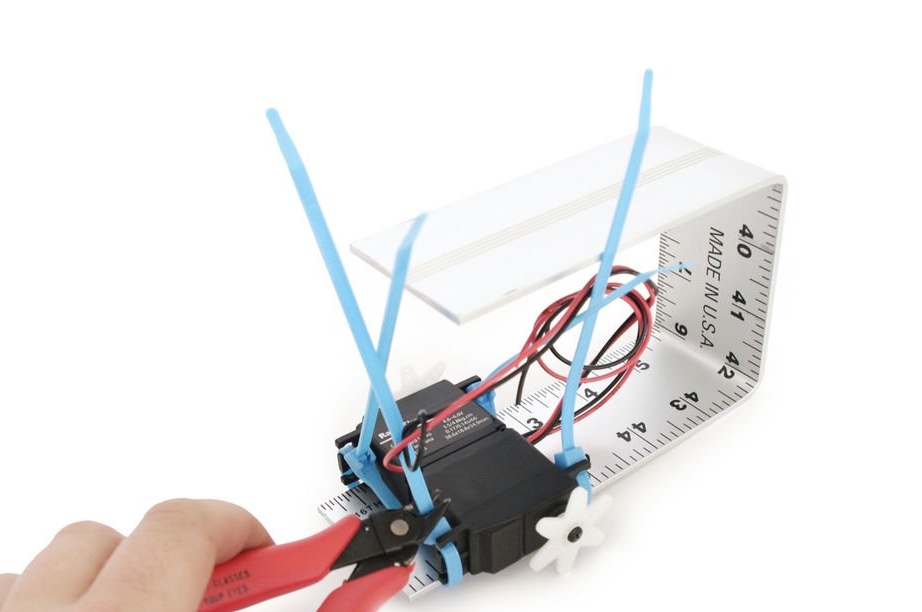
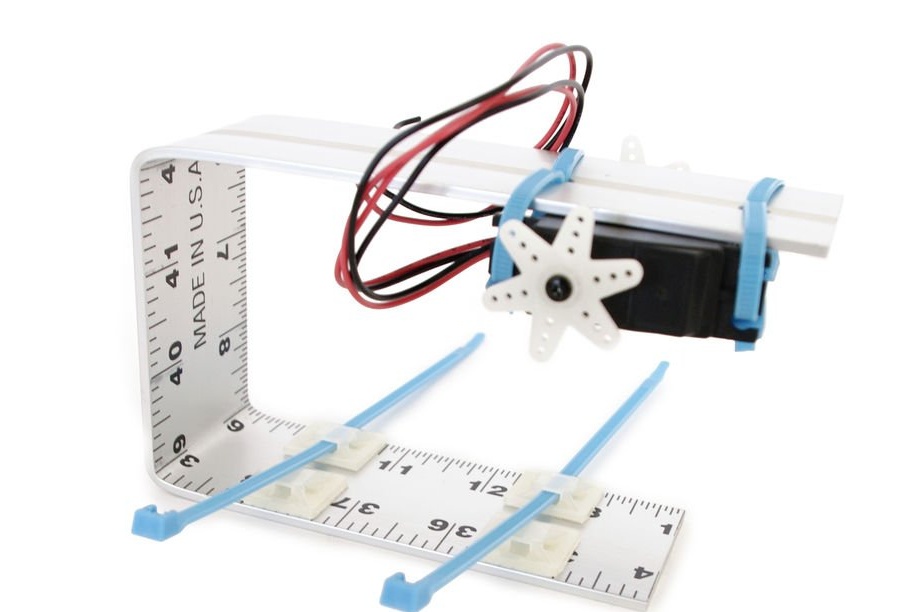
On välttämätöntä kiinnittää servot linjalle muovipidikkeillä porattujen reikien läpi. Servomoottorien on istettava selkänsä toistensa kanssa.
Vaihe 6: Pohja kiinnittimiin
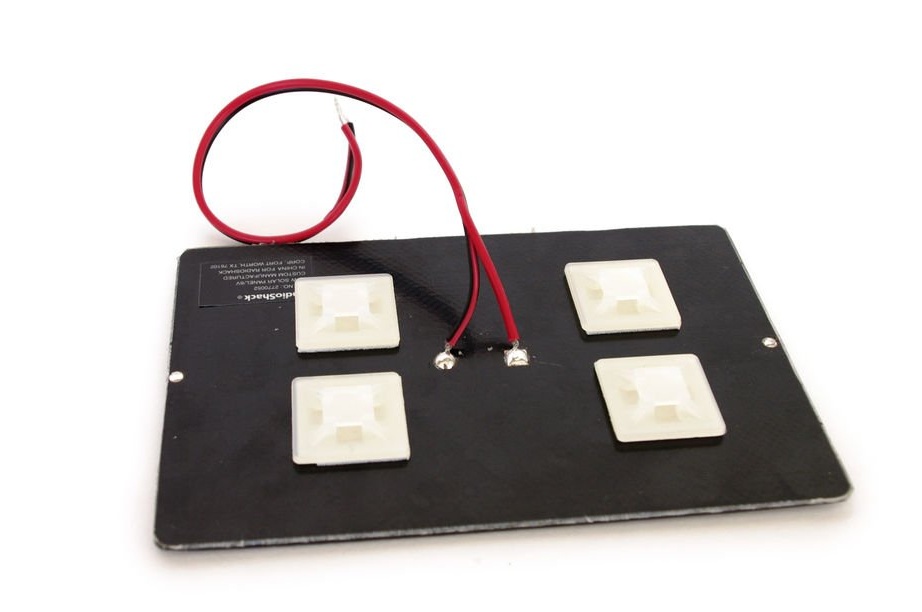

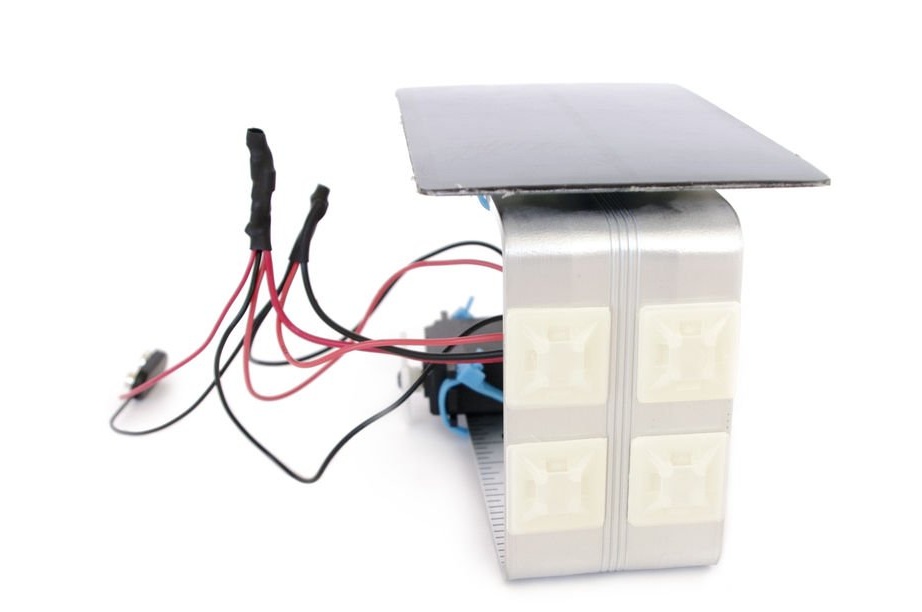
Aseta kaksi paria kiinnitysalustoja vierekkäin aurinkopaneelin takaosaan. On tärkeää, että kunkin parin kanavat ovat samalla linjalla.
Vaihe 7: lisää syitä
Kiinnitä kaksi uutta alustaa U-tankojen sisäpuolelle, servossa vastapäätä olevalle puolelle.
Vaihe 8: Yhteys
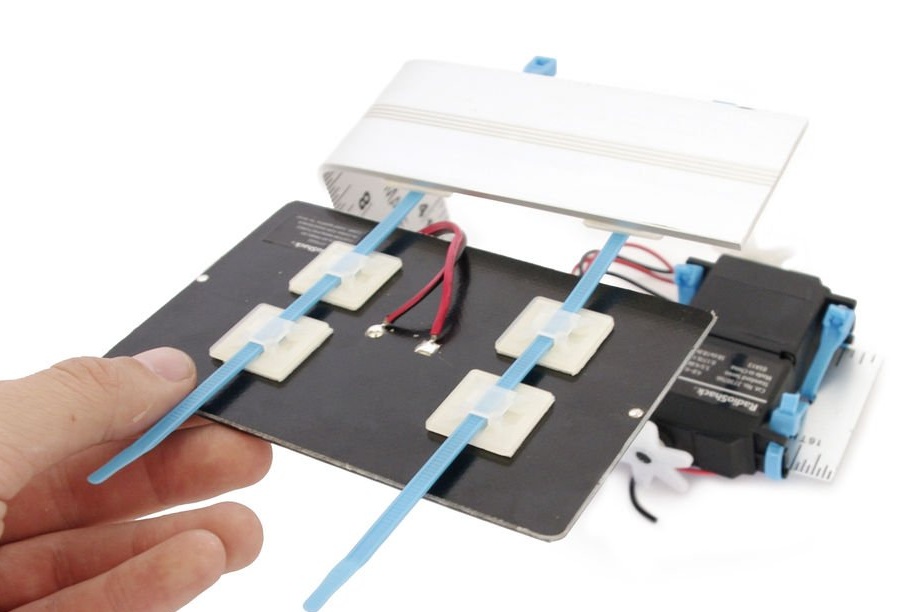
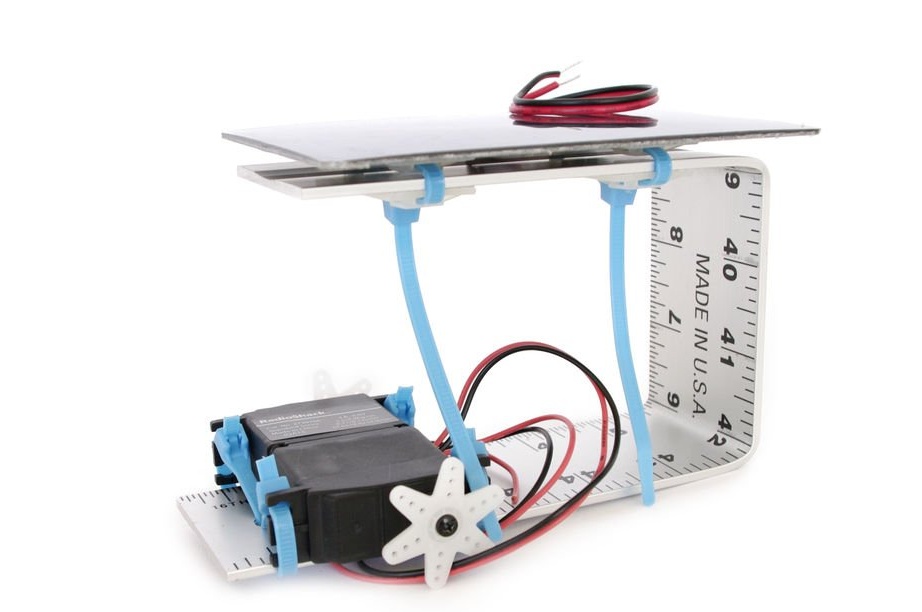
Kiinnitä aurinkopaneeli puristimilla kiinteiden tukikohtien läpi.
Vaihe 9: Aseta paristot paikoilleen


Aseta paristot akkuun.
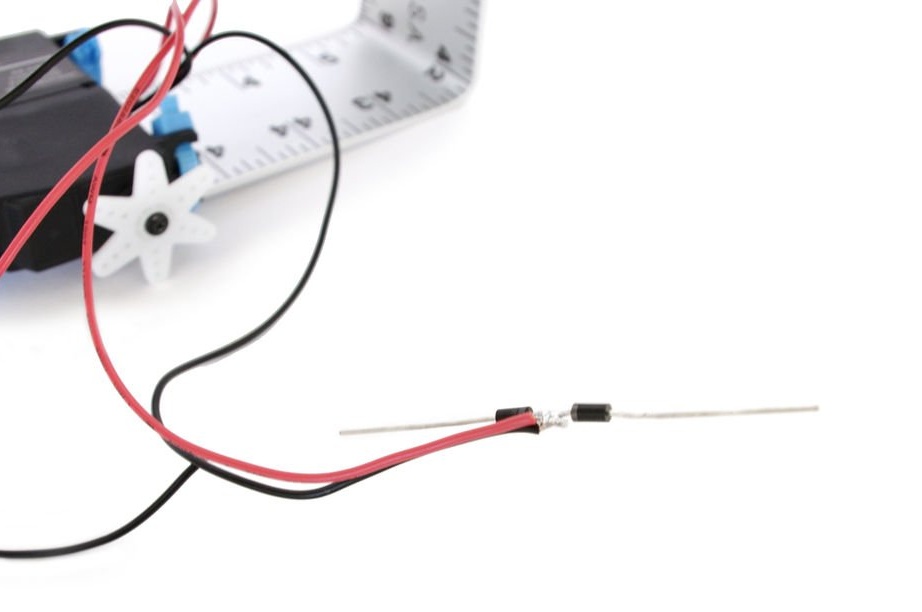
Vaihe 10: diodit

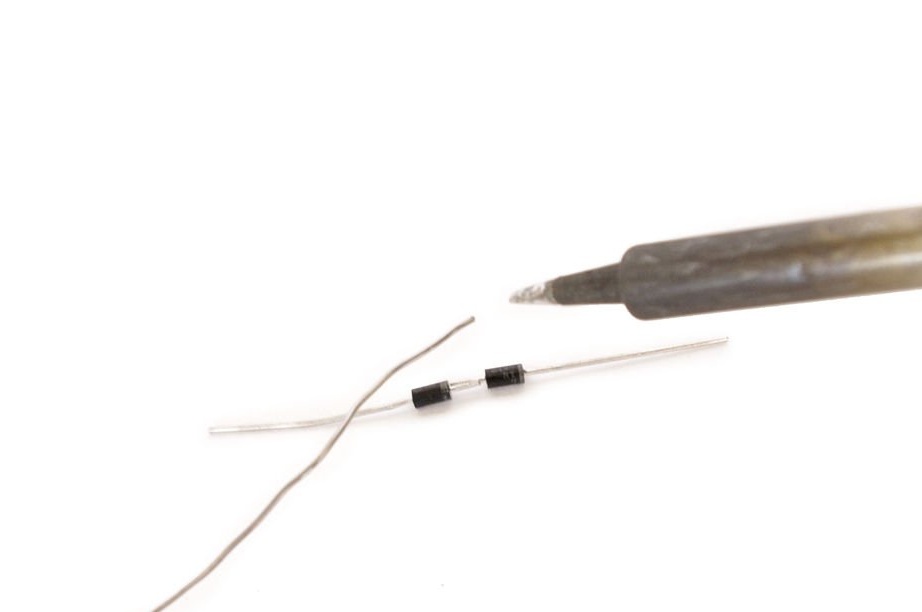
Juotosta kaksi diodia yhdessä katodien kanssa (diodien sivu kiskolla).
Vaihe 11: ketjun kokoonpano
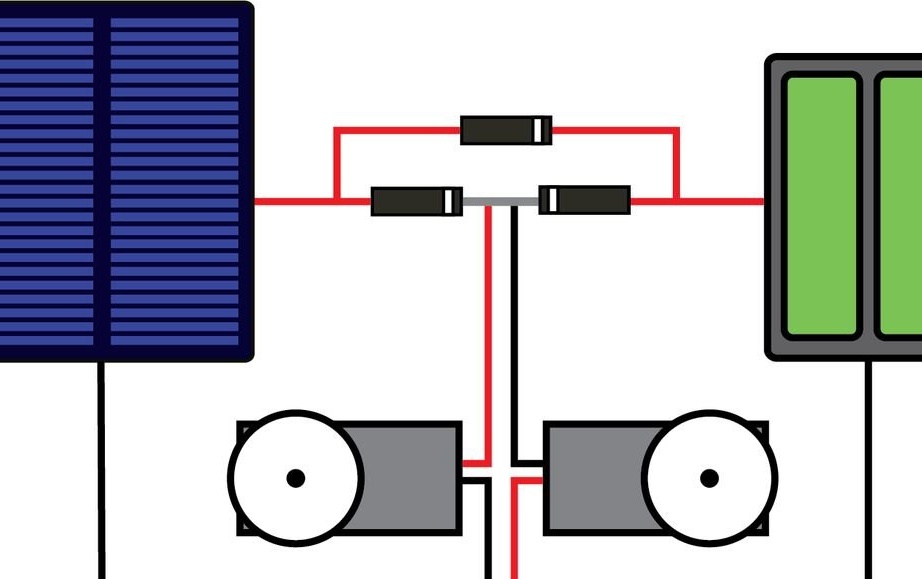
Tämän robotin piiri perustuu David Cookin yksinkertaiseen aurinkoenergian latauspiiriin. Piiri sisältää kaksi Schottky-diodia, jotka on kytketty katodi-katodi, yksi diodi on kytketty aurinkopaneeliin ja toinen akkuista. Tämän kokoonpanon ansiosta virta saadaan sekä akkuista että aurinkopaneelista olosuhteista riippuen.
Koska akut ovat ladattavia, kolmas Schottky-diodi on kytketty suoraan aurinkopaneelista akkuosastoon akkujen lataamiseksi auringosta.
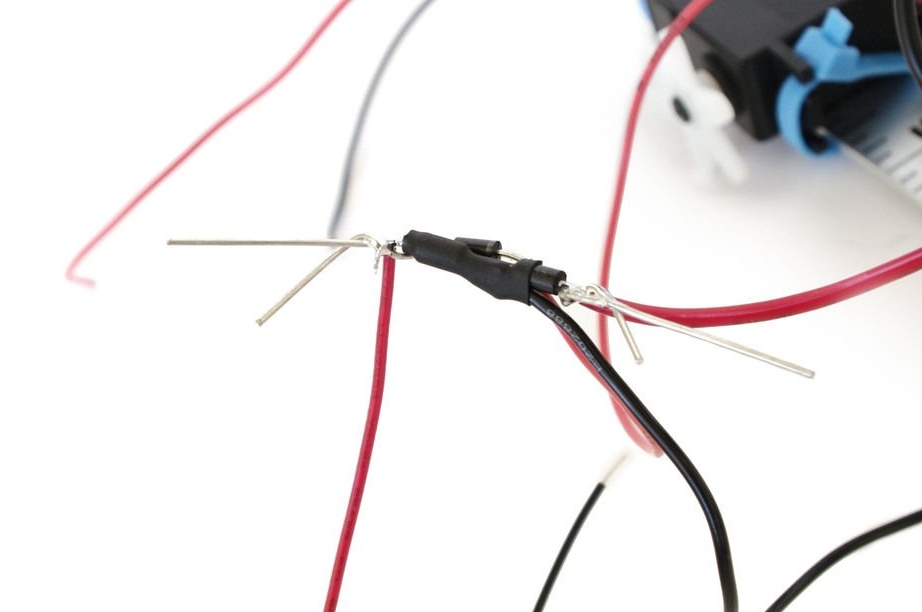
Yhdistä kaikki kytkemällä punainen johto yhdestä servosta ja musta johto toisesta katodiliitännän keskipisteeseen.
Kytke seuraavaksi punainen johdin akun navasta yhden Schottky-diodien anodiin. Kytke punainen johdin aurinkopaneelista toisen diodin anodiin.
Juota nyt kolmannen diodin anodi punaiseen johtoon, joka on kytketty aurinkopaneeliin, ja katodi punaiseen johtoon akun navasta.
Kierrä kaikki johdot lämpö kutisteletkuilla suojaamaan piiriä oikosululta.
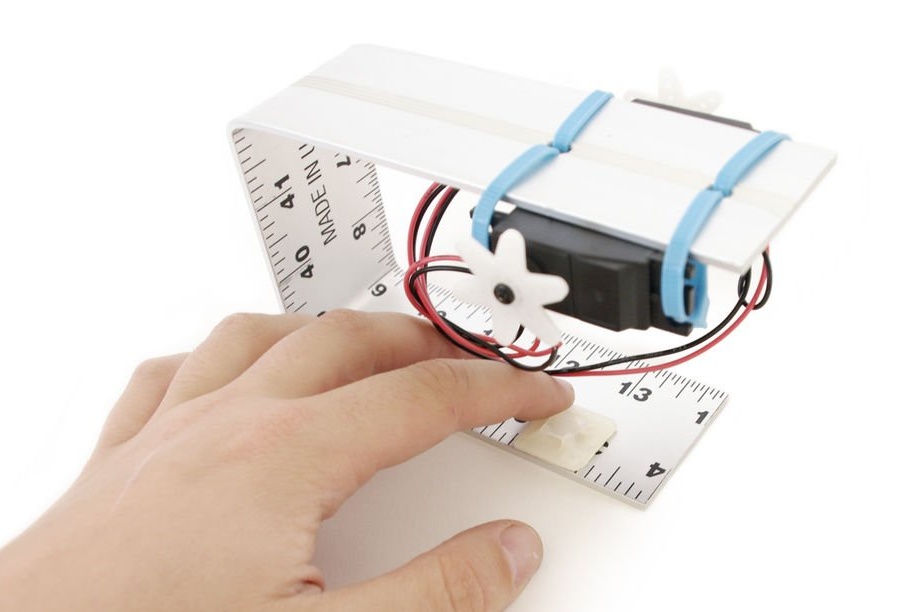
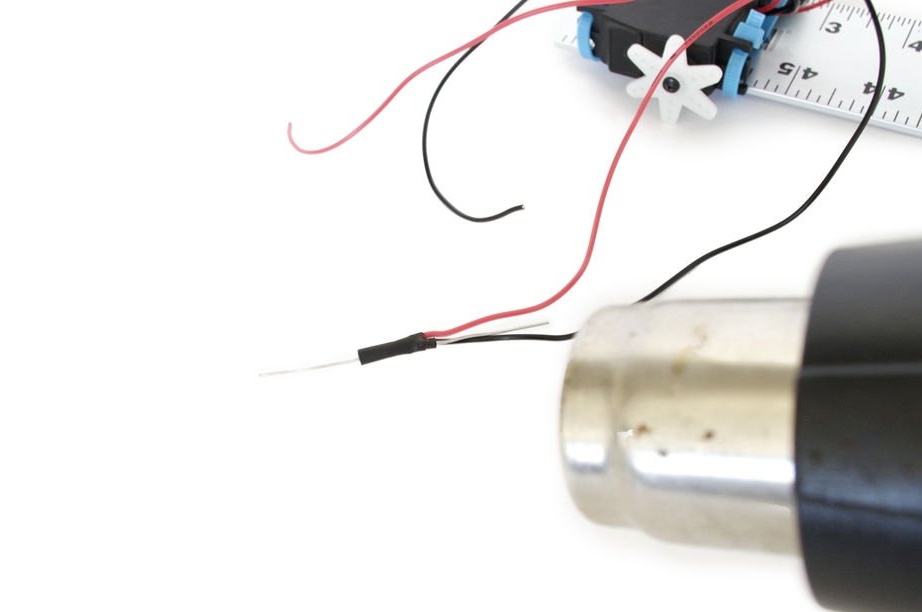
Vaihe 12: Jotkut johdot
Juota yhteen kaikki mustat johdot ja loput vapaat punaiset johdot servoista.
Hanki kaksi juotettua liitosta; yksi voimalle ja toinen maadoitukselle. Kääri nämä molemmat liitokset lämpö kutistuvilla letkuilla tai sähköteipillä.
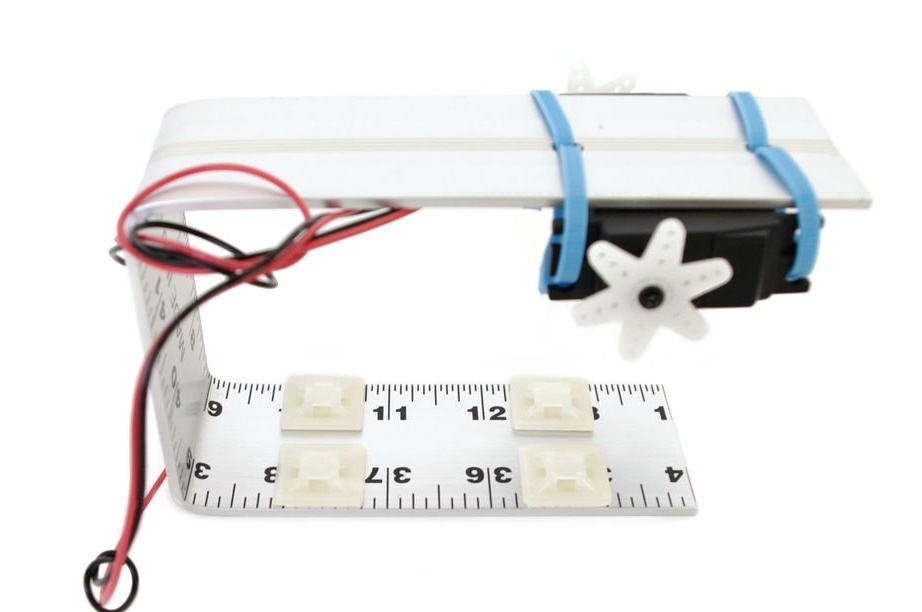
Vaihe 13: Ja vielä joitain syitä kiinnittimiin
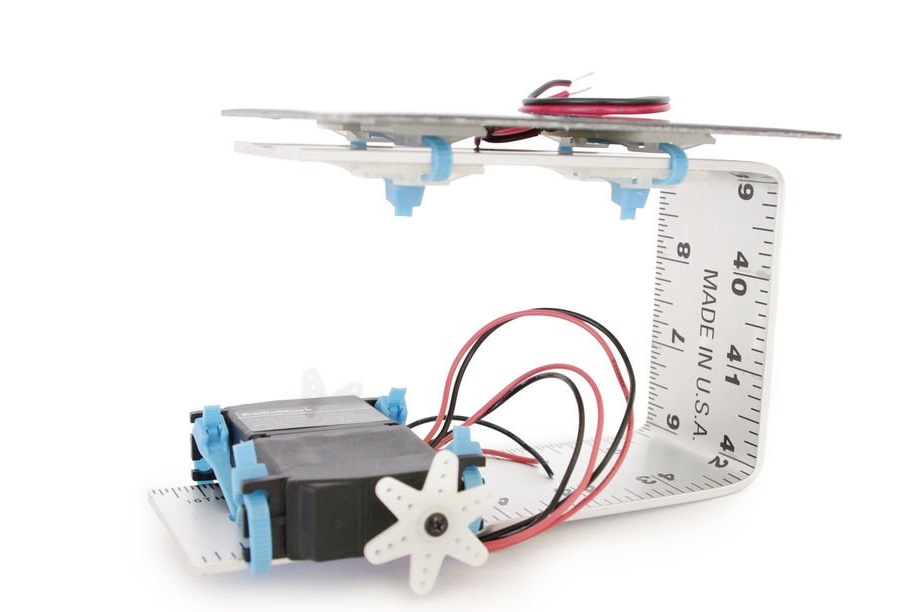
Kiinnitä kaksi paria emäksiä U: n muotoisen kaarevan viivaimen alapintaan.
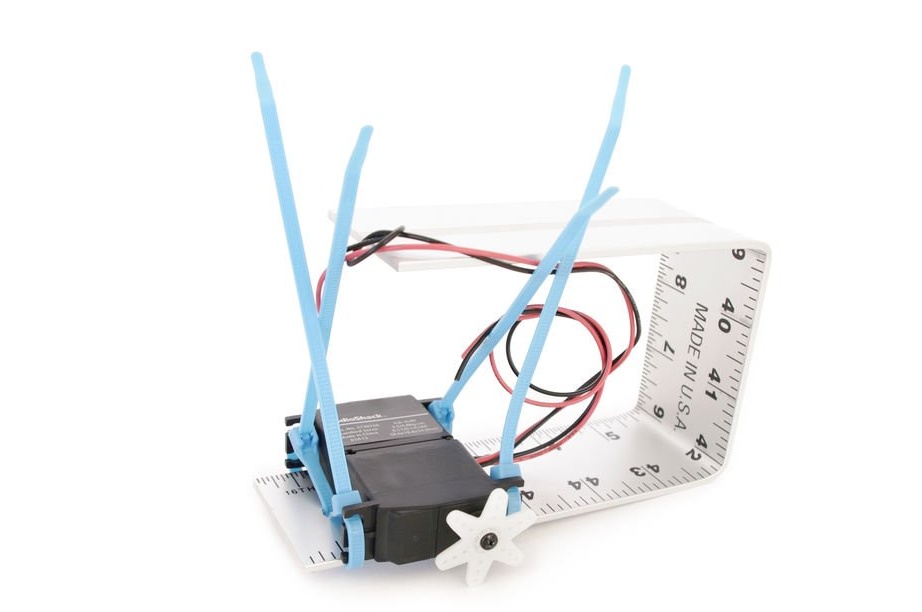
Vaihe 14: Paristojen kiinnittäminen
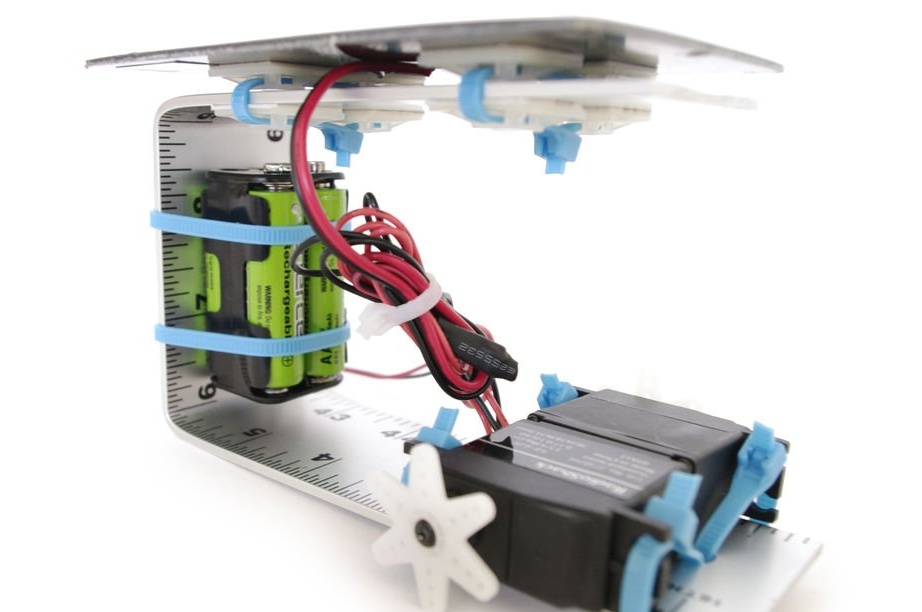
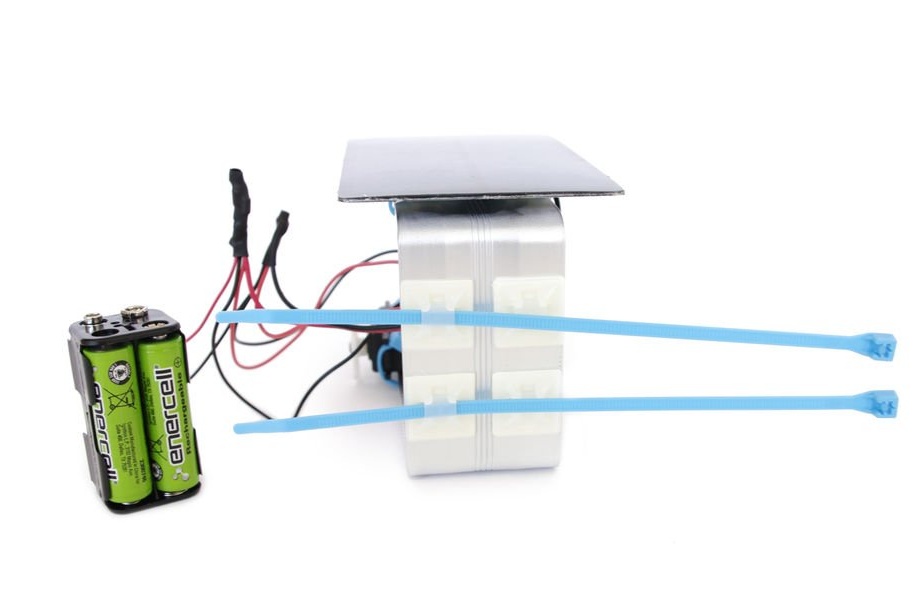
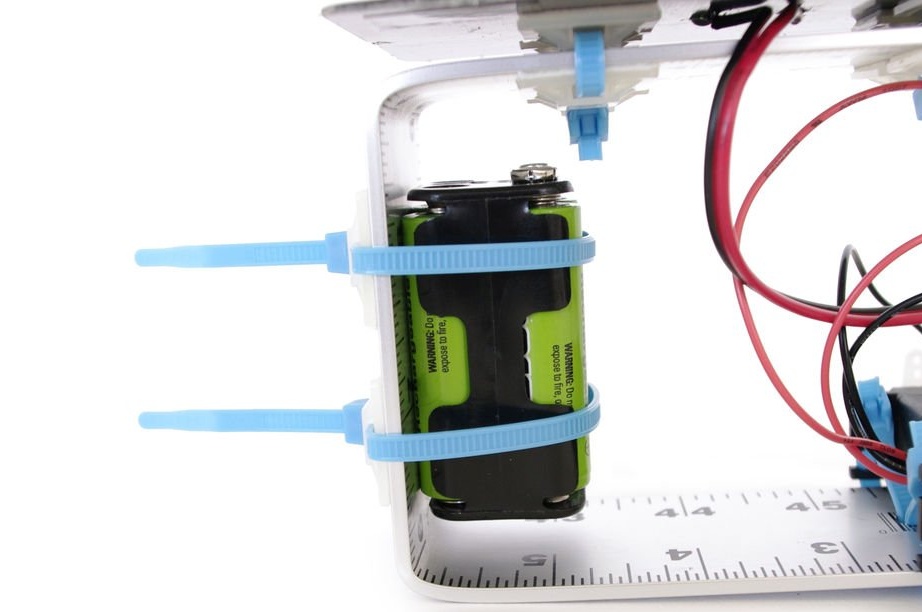
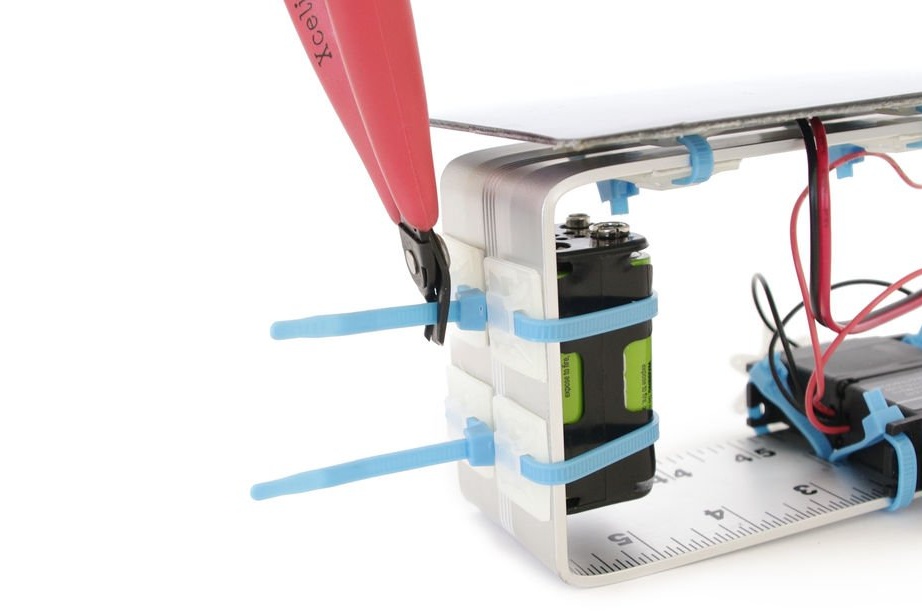
Kiinnitä akut kiinnittimillä U-muotoisen viivaimen sisälle niin, että ne istuvat tukevasti ja liikkumattomasti paikoillaan.
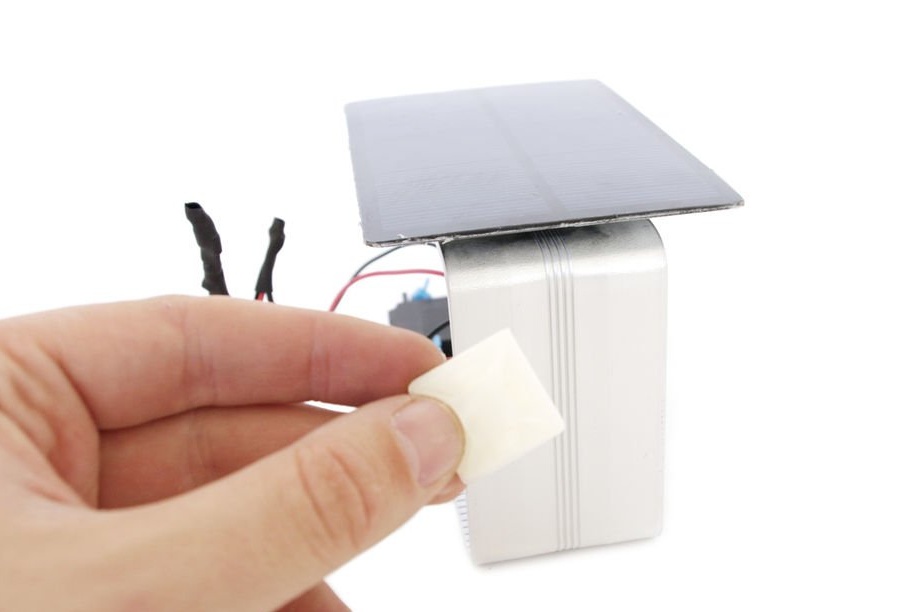
Vaihe 15: leikkaaminen


Leikkaa koukut muovisiin seinätelineisiin.
Vaihe 16: Pyörät
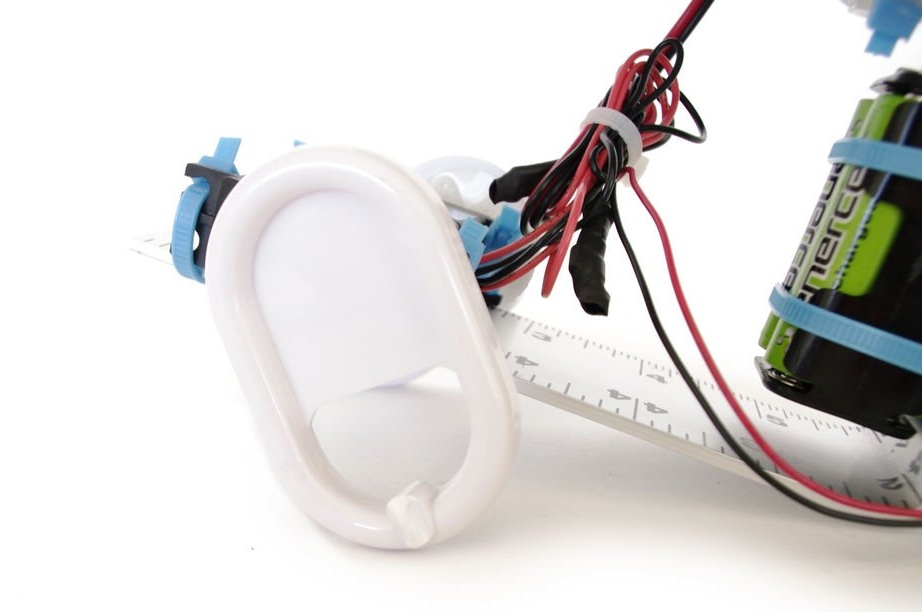
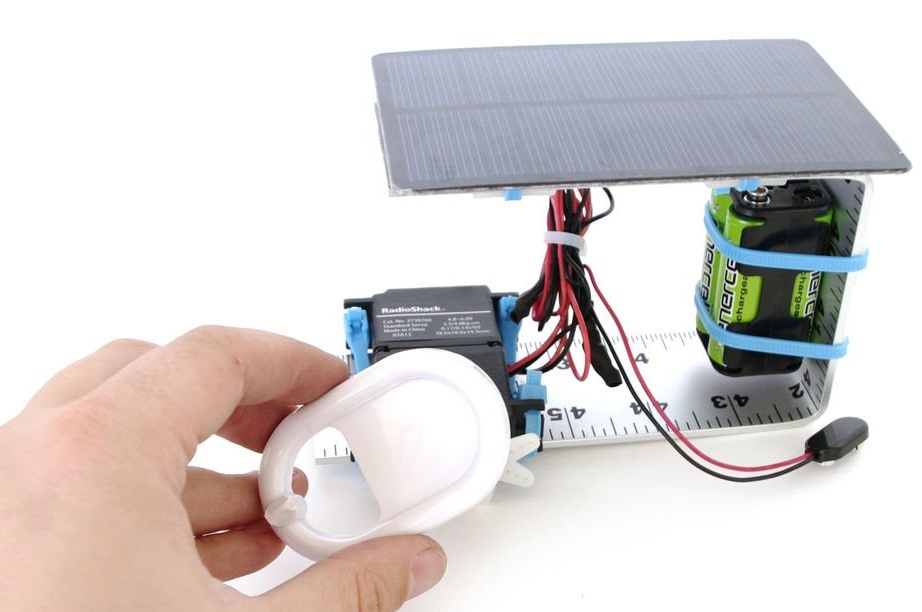
Liimaa seinäkiinnikkeet servojen ulkovaihteisiin (tämä on jotain pyöriä).
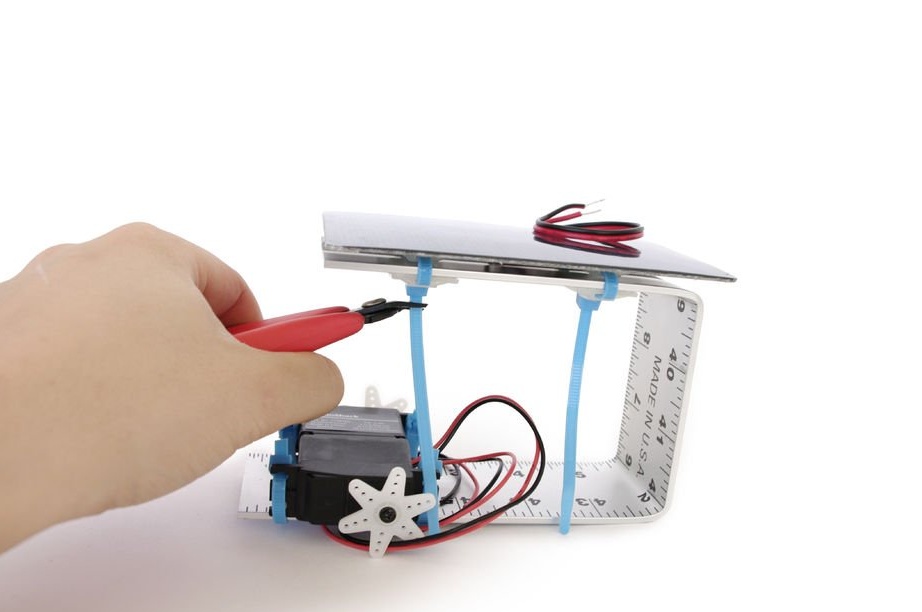
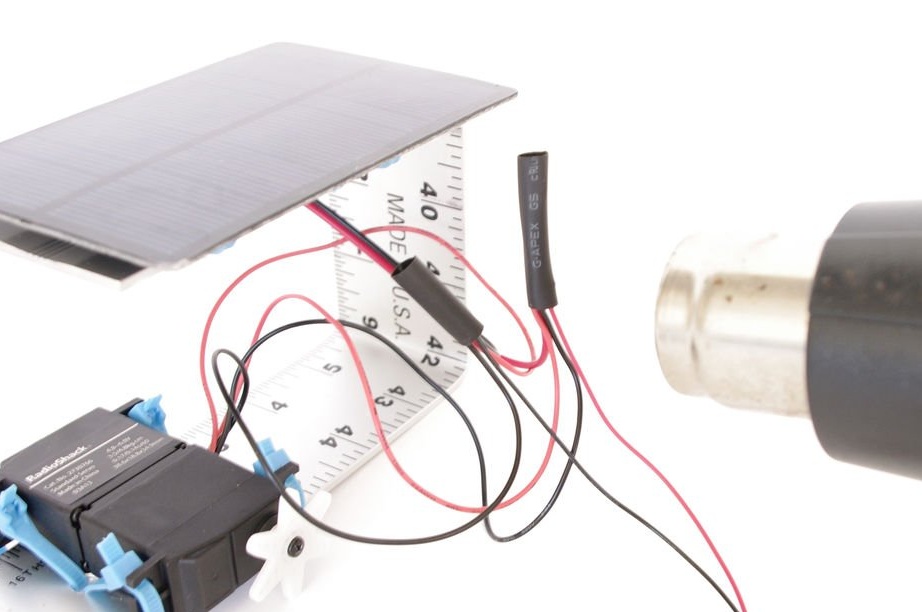
Vaihe 17: Ota käyttöön!

Kytke johto akkuun ja robotti alkaa liikkua.