
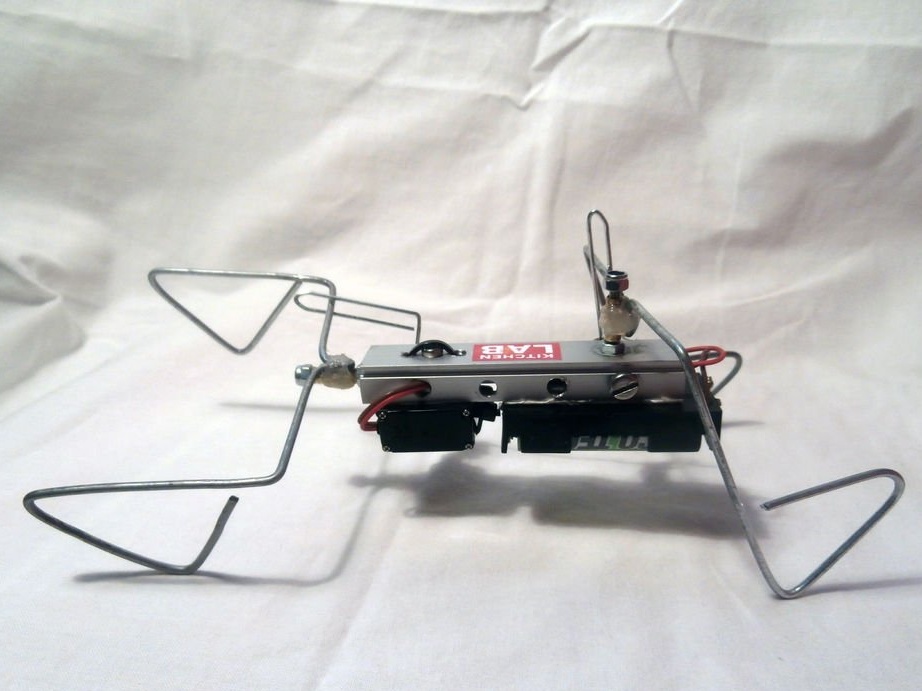
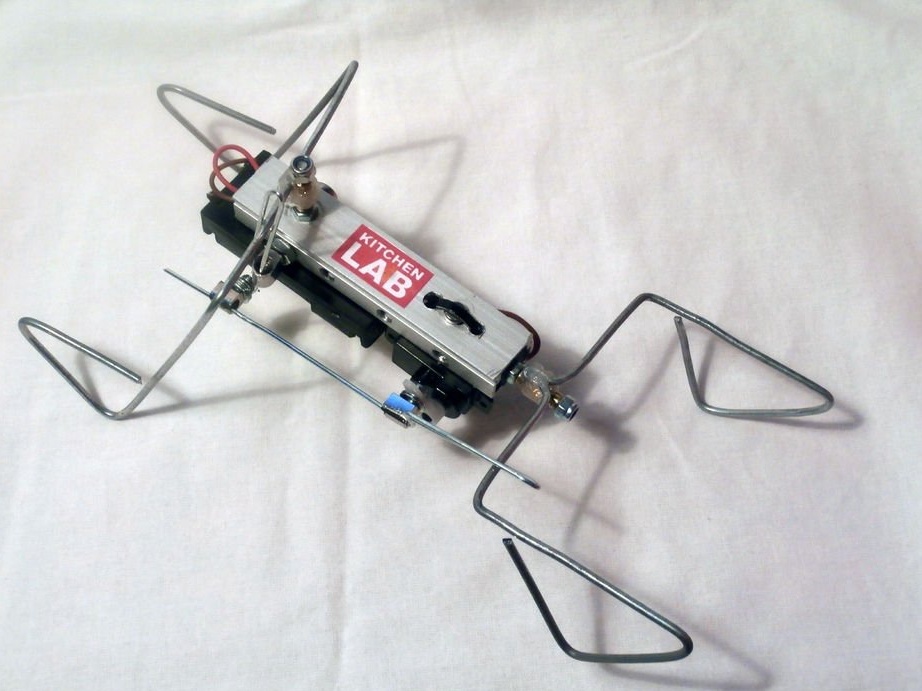
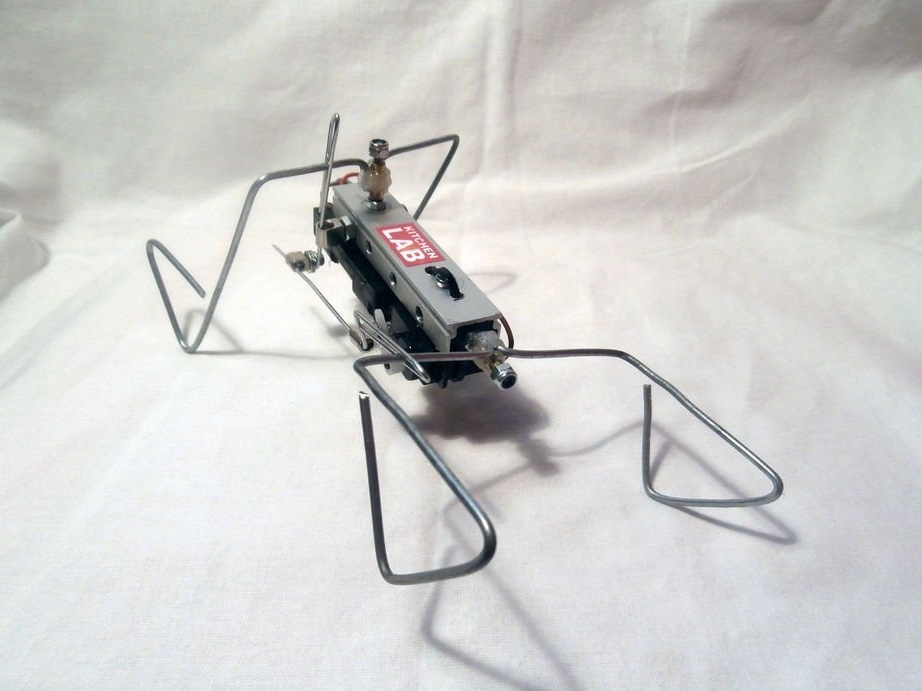
Hei kaikki! Minua inspiroitiin luomaan BEAM-robotti, kun olen nähnyt tarpeeksi tällaisia robottien yksimoottorisia ja kaksimoottorisia ihmeitä Internetissä. Ideana oli luoda kävelyrobotti, joka astuu samalla tavalla kuin 1- tai 2-moottoriset BEAM-kävelijät. Useiden epäonnistuneiden kokeilujen jälkeen tein mitä halusin!
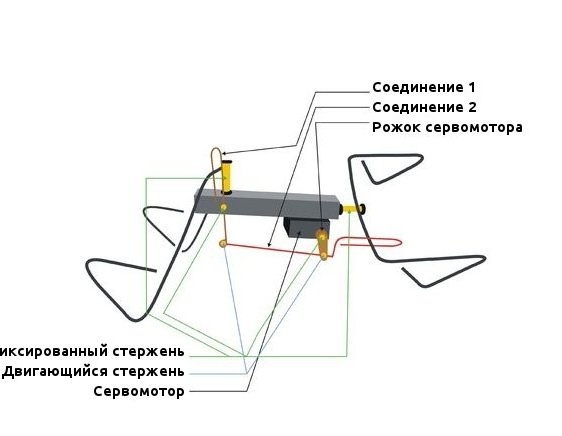
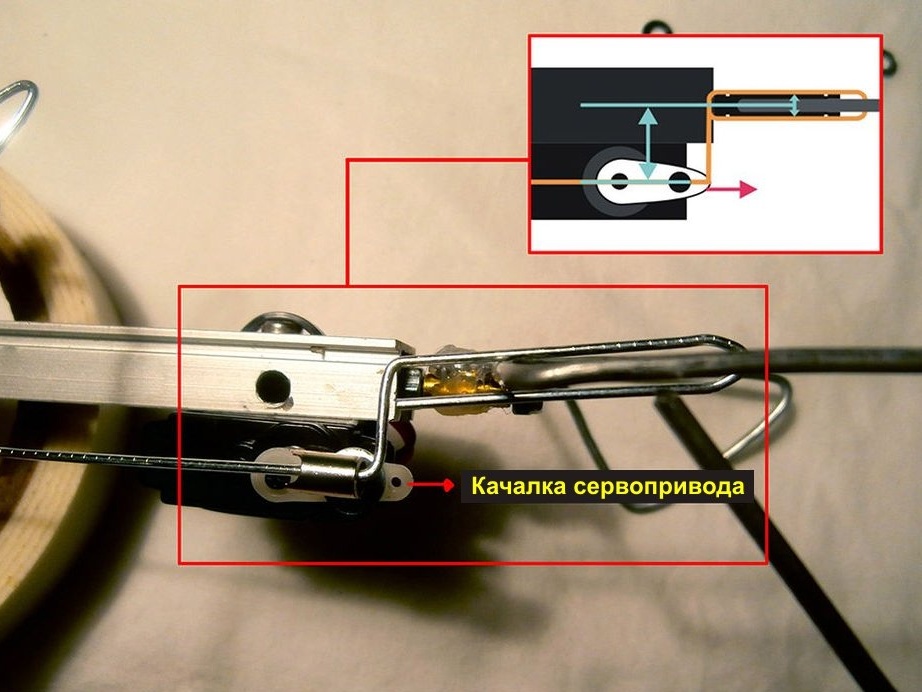
Vaihe 1: Mekanismi
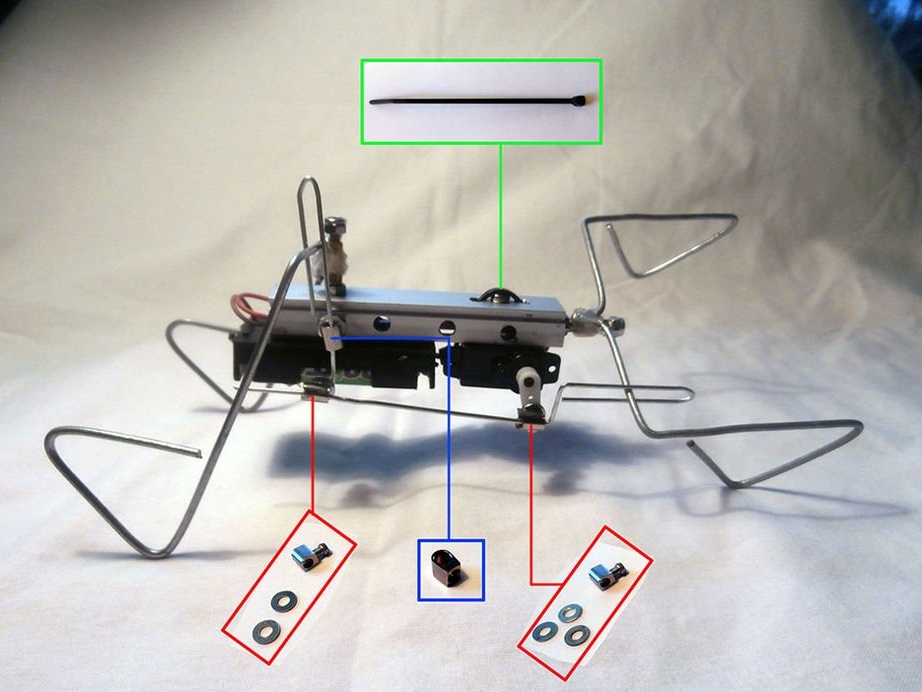
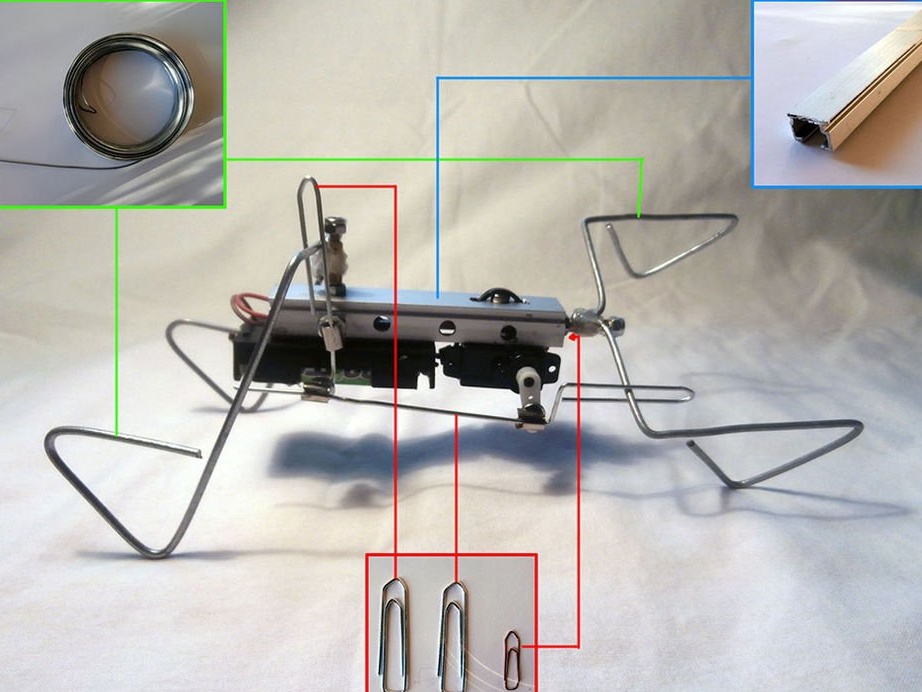
Vaihe 2: Vaadittavat osat

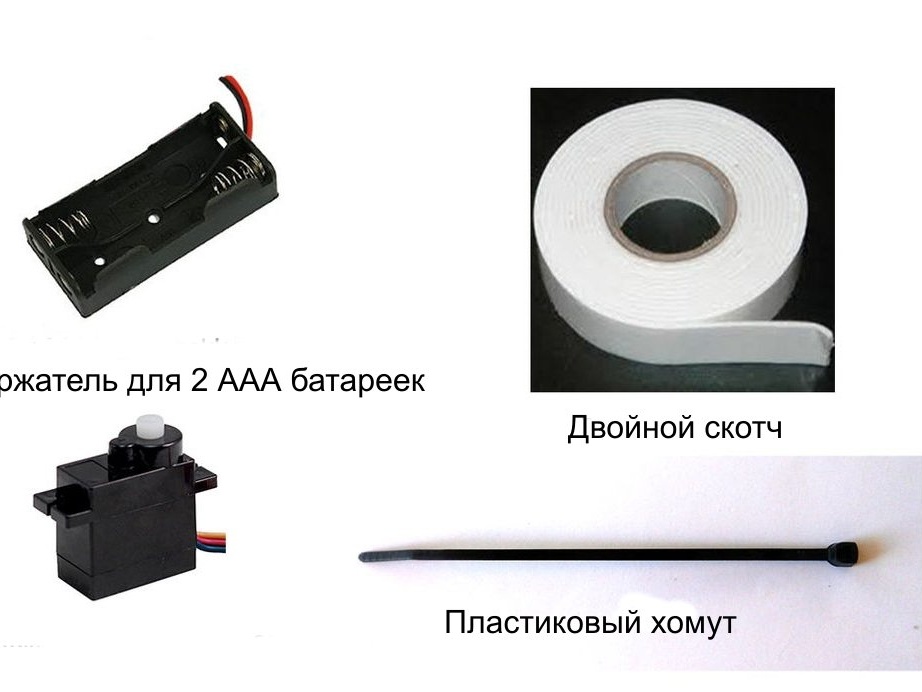



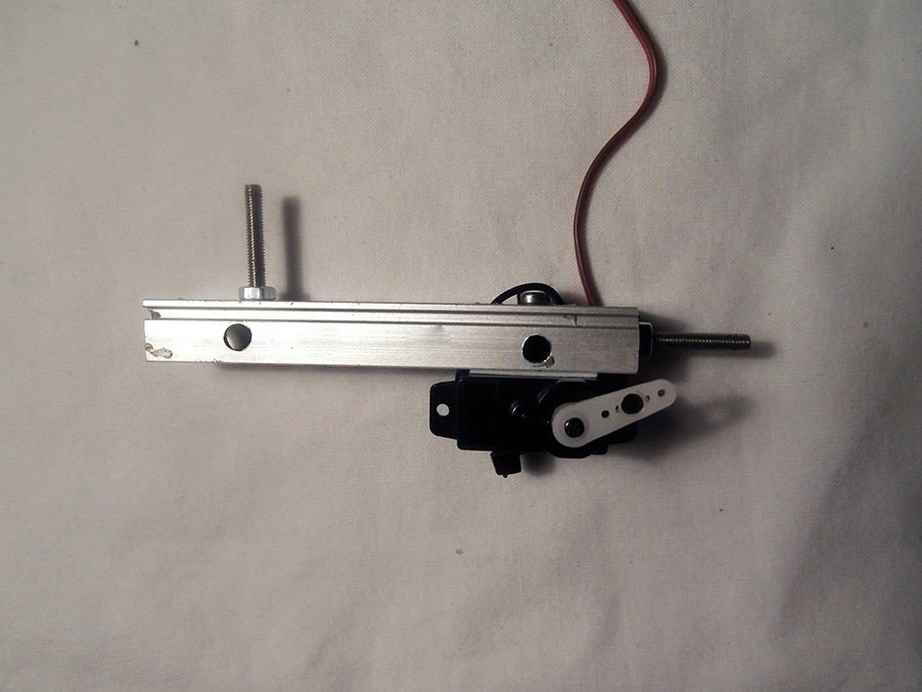
(1x) jatkuva kierto servo
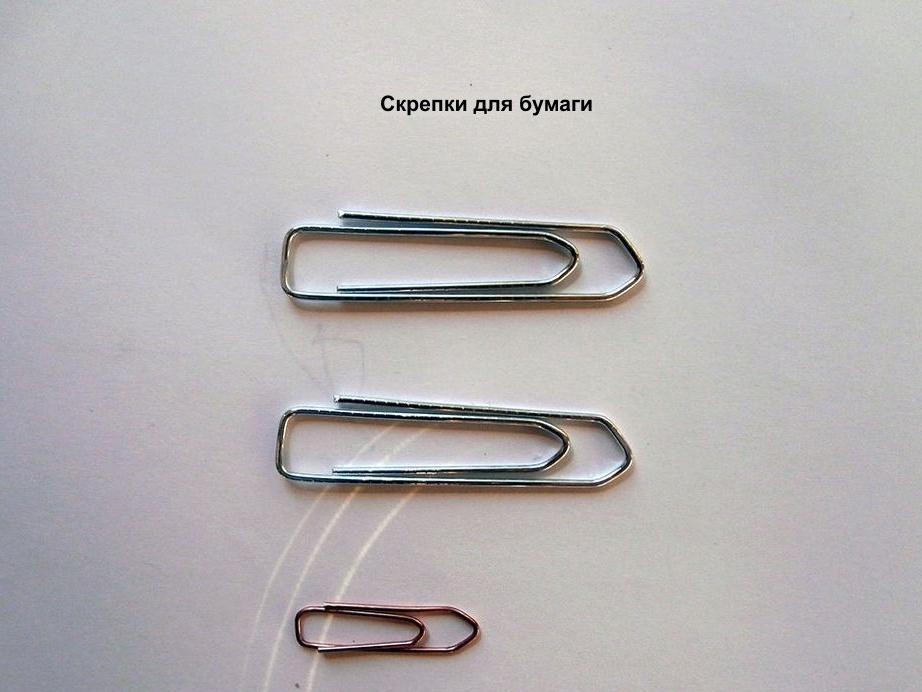
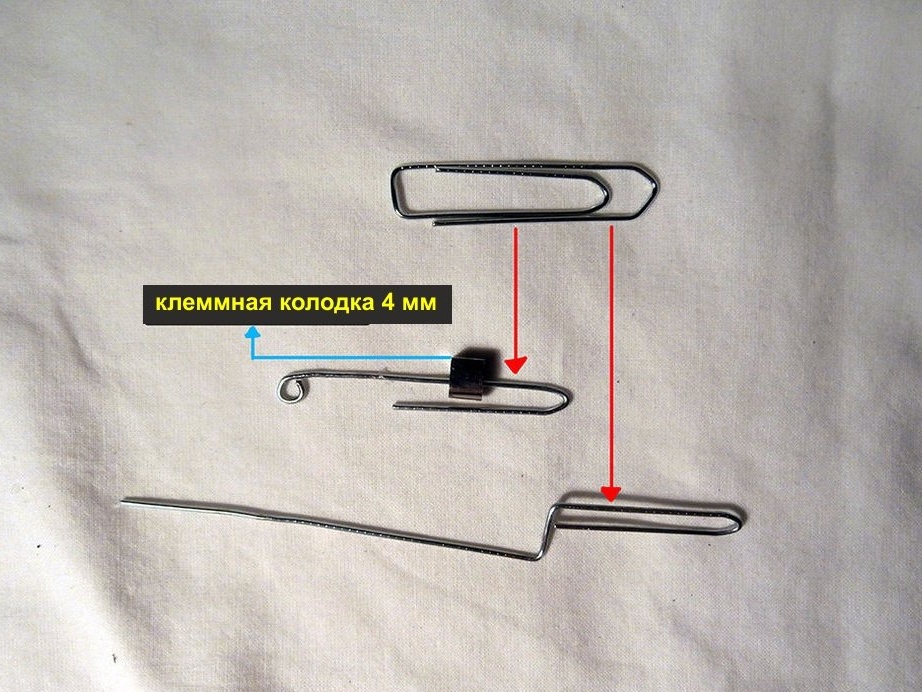
(2x) suuret paperiliittimet
(1x) pieni paperiliitin
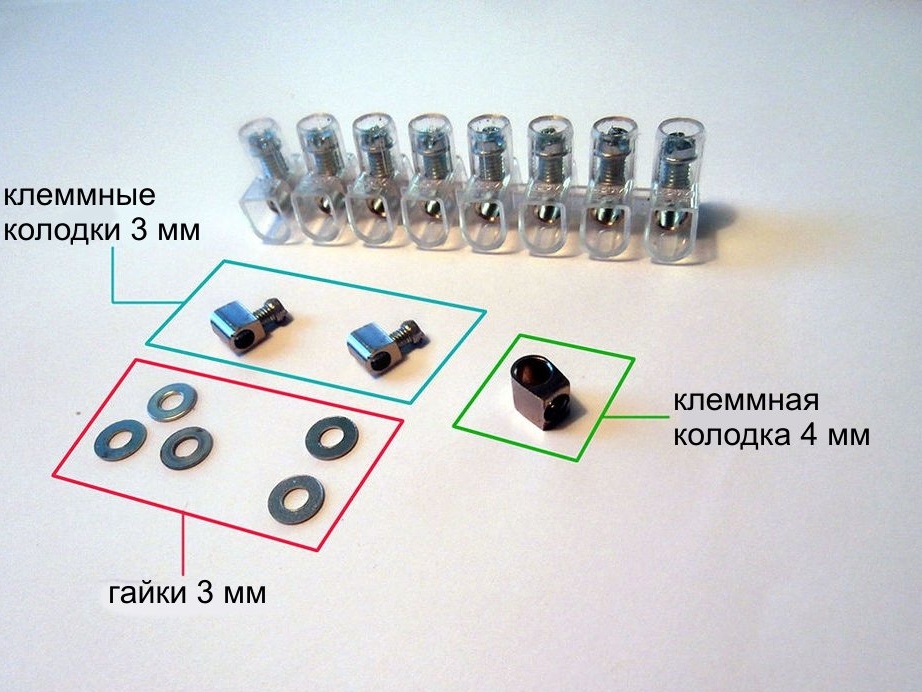
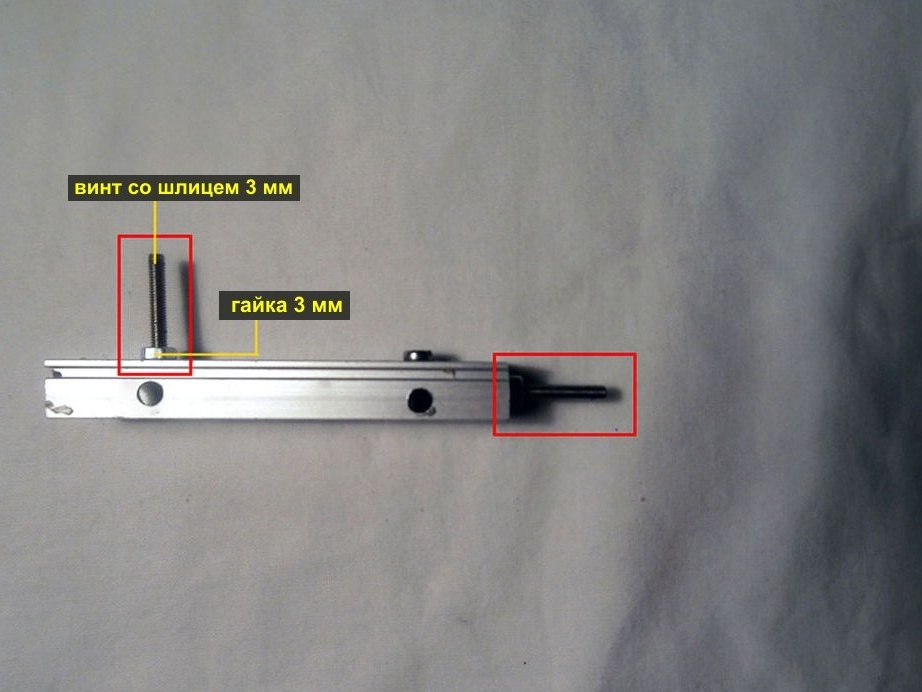
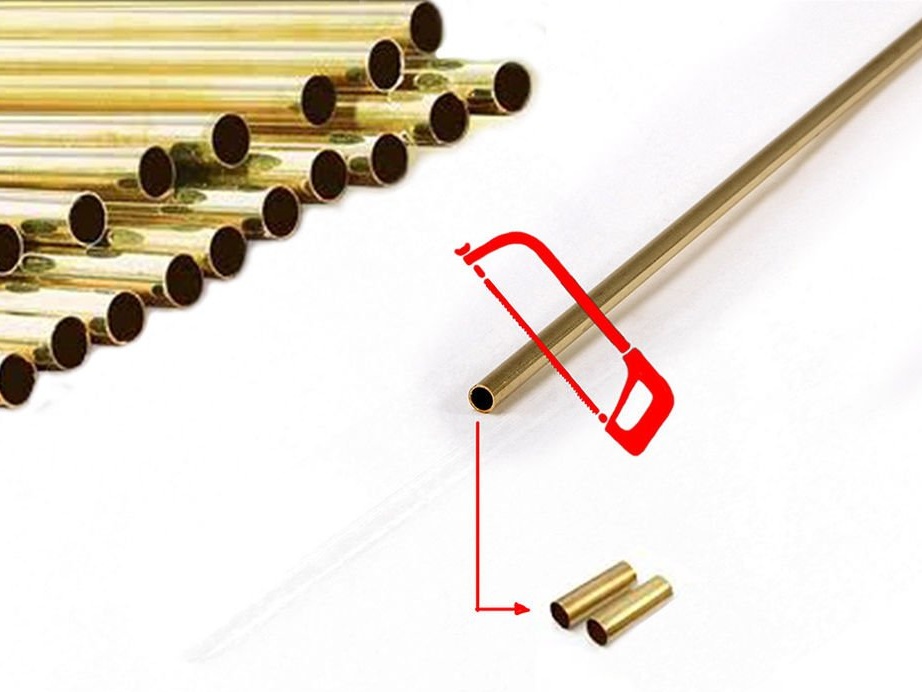
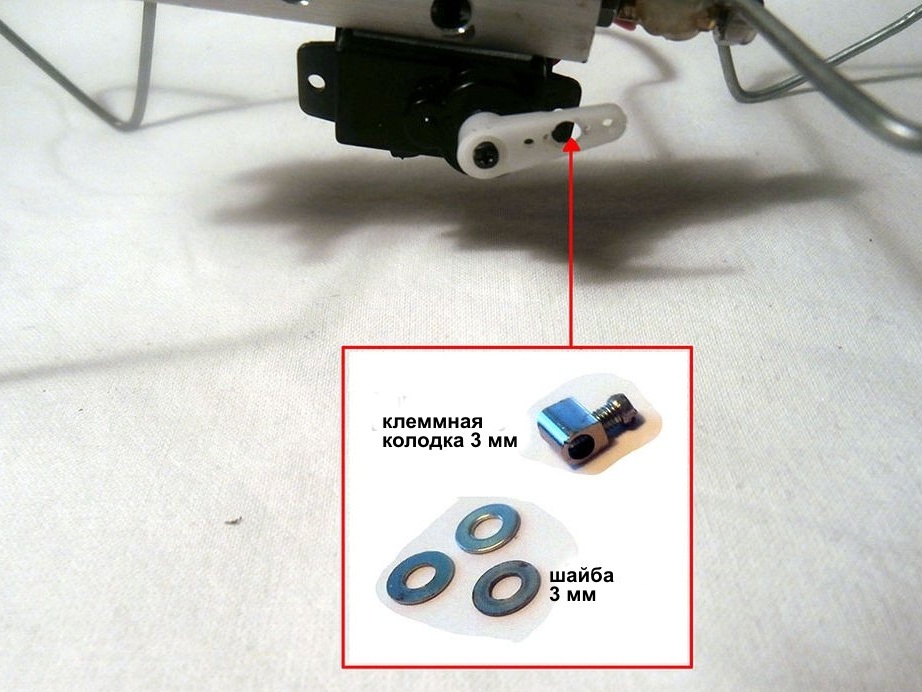
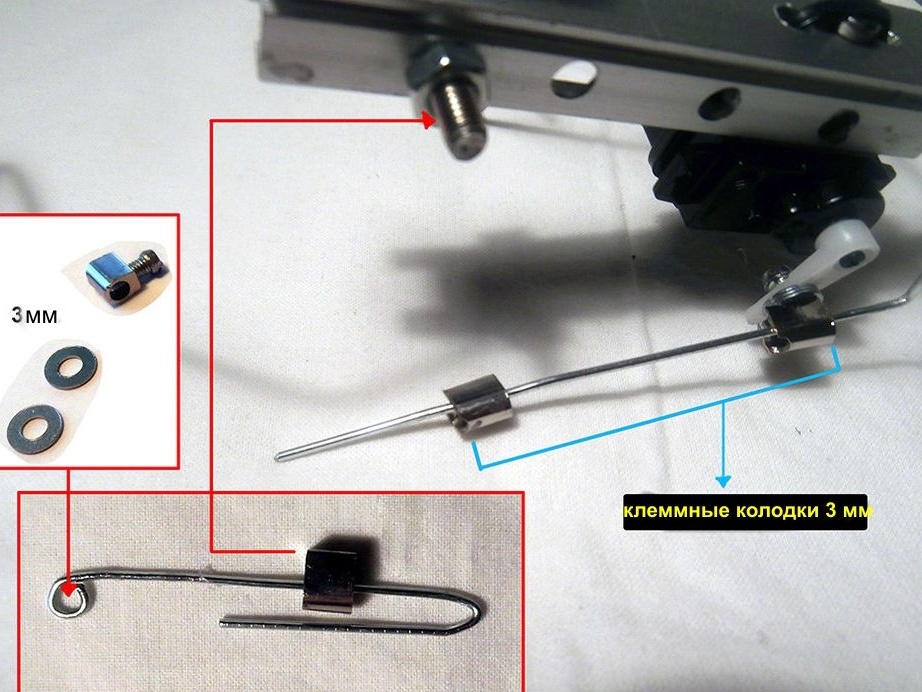
(2x) riviliittimet (3mm)
(1x) riviliittimet (4mm)
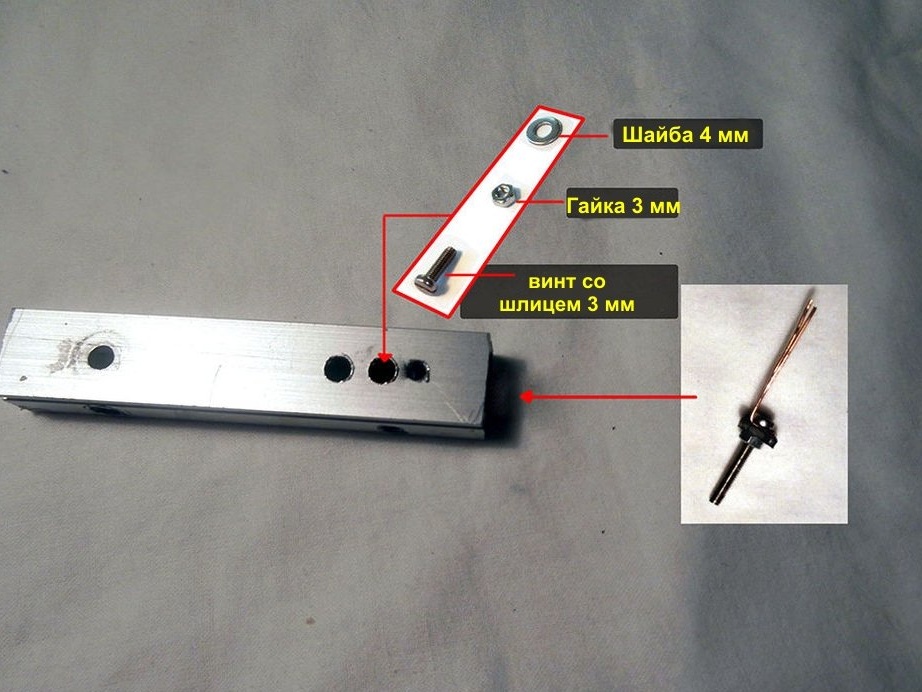
(1X) Käytetty alumiiniprofiilikappale
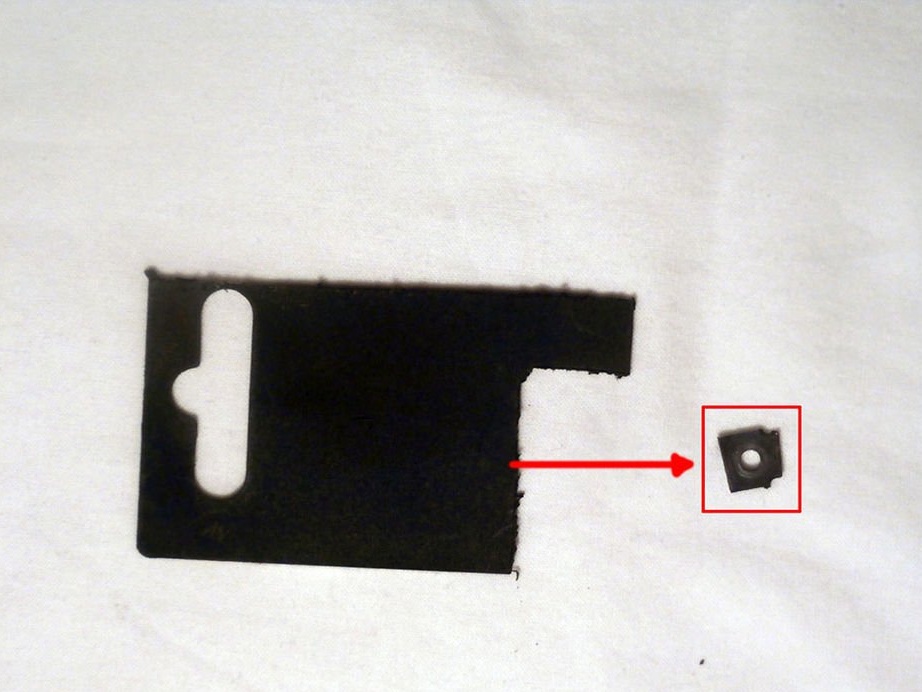
(1X) muovipala
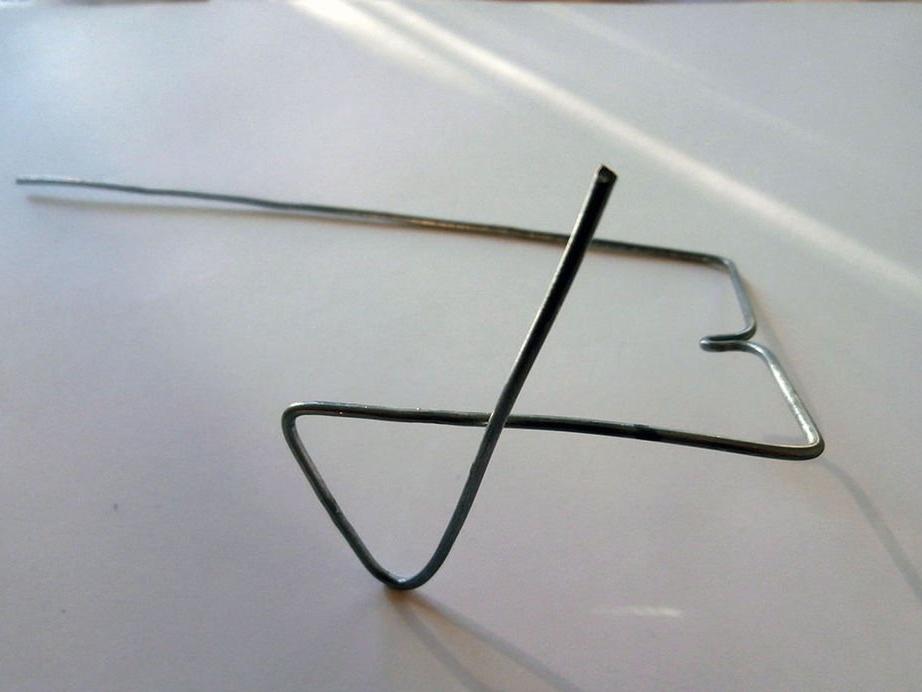
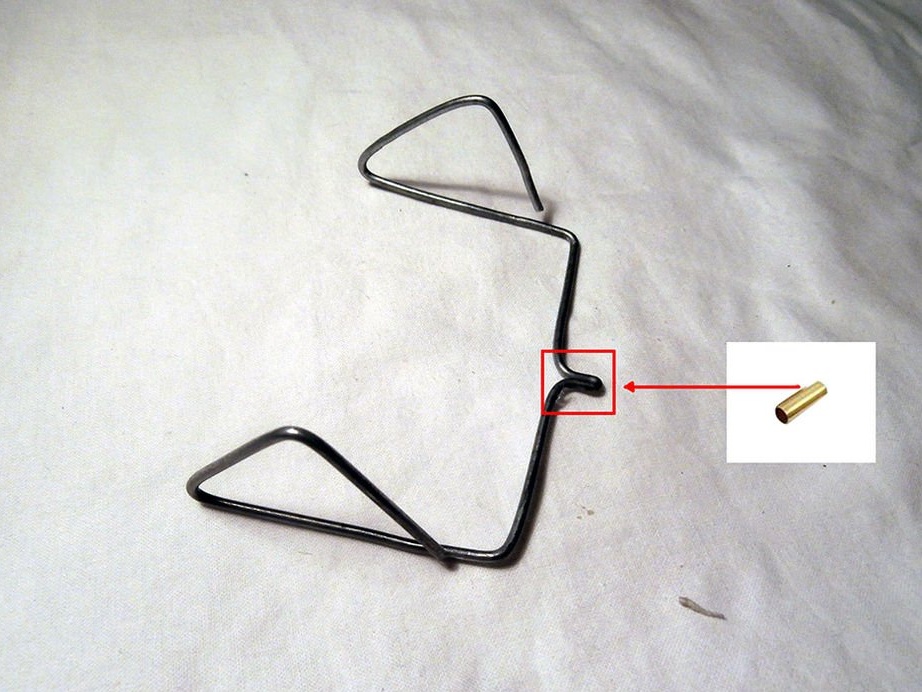
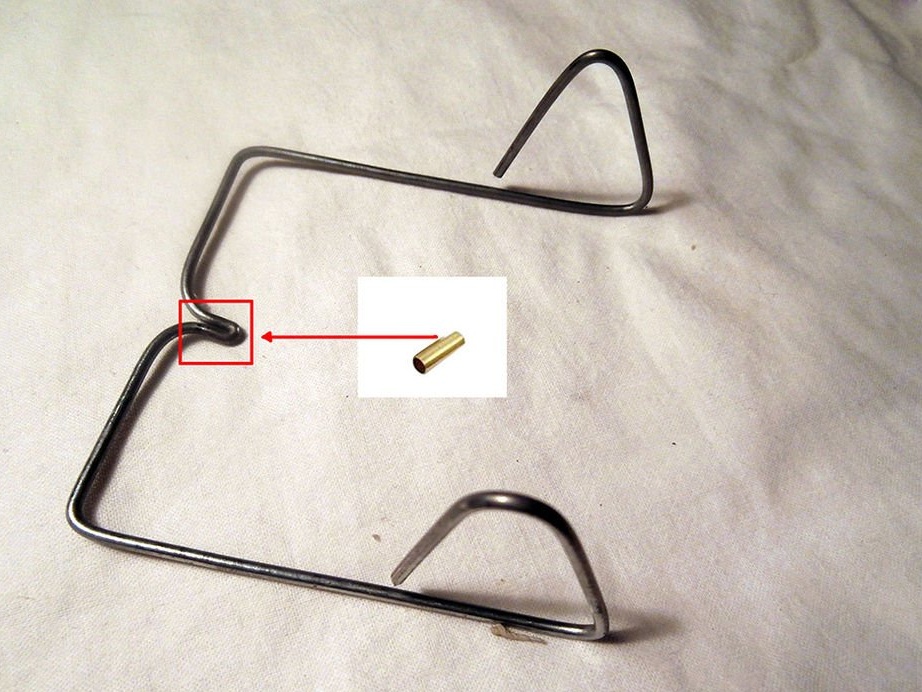
Teräslanka (2 mm)
Kaksinkertainen teippi
Messinkiputki
(1X) pieni puristin
(1X) akku (2 x AAA)
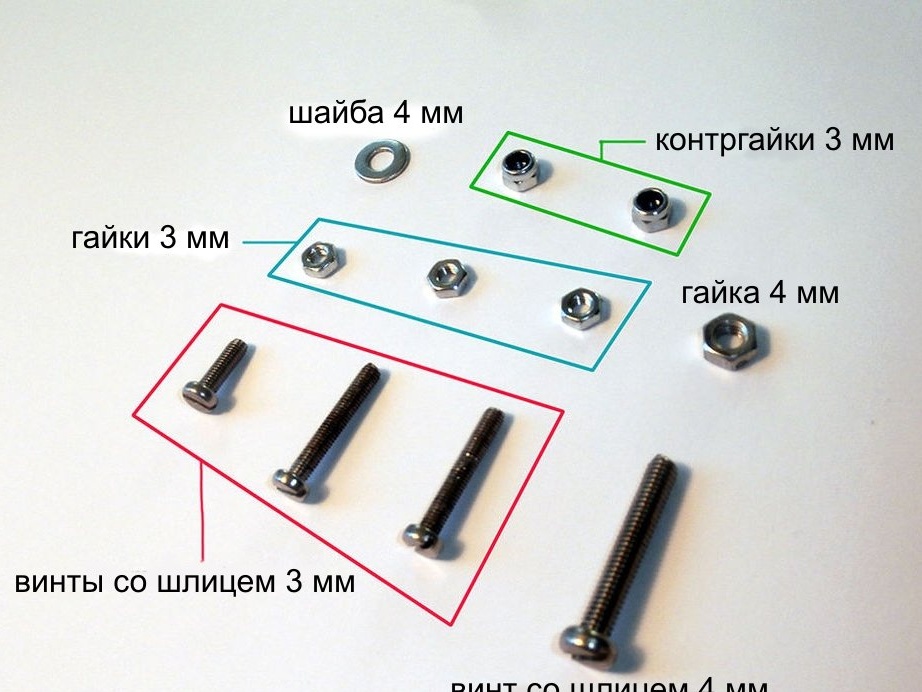
(2X) lukkomutterit (3 mm)
(3X) mutterit ja ruuvit (3 mm)
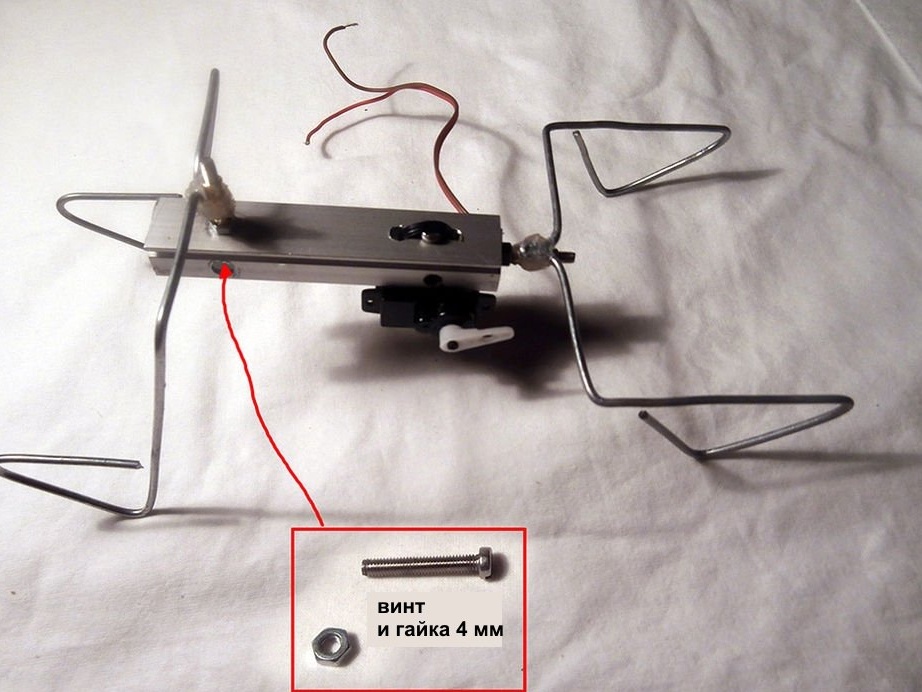
(1x) mutterit ja ruuvit (4 mm)
(5x) aluslevy (3mm)
(1X) aluslevy (4mm)
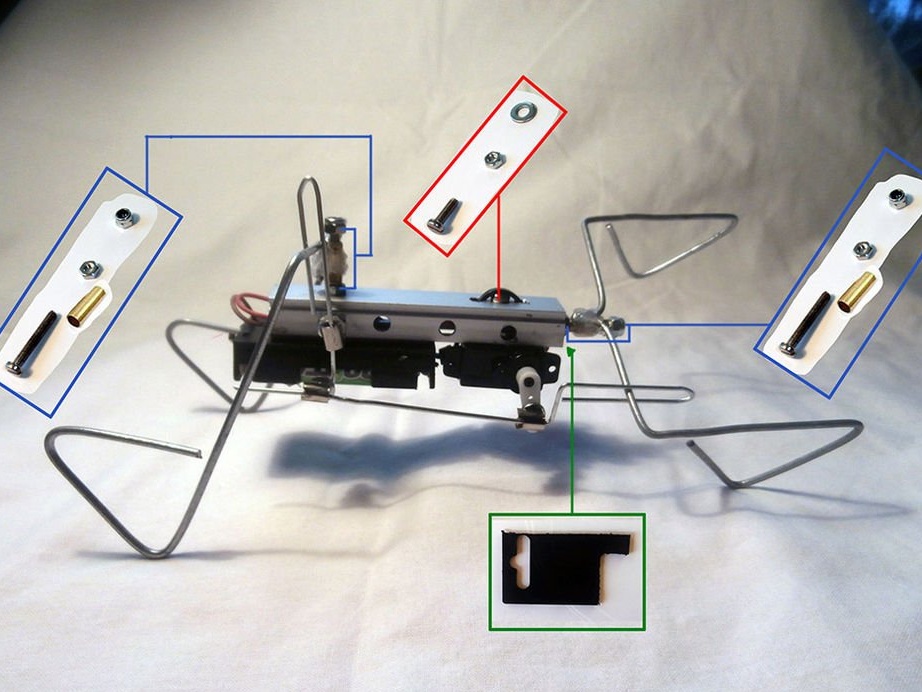
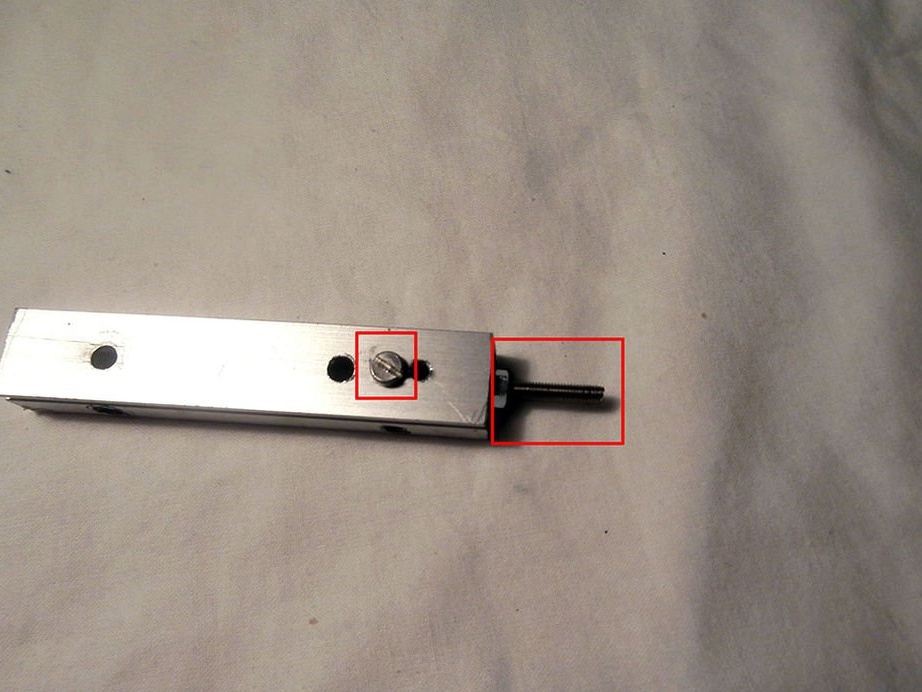
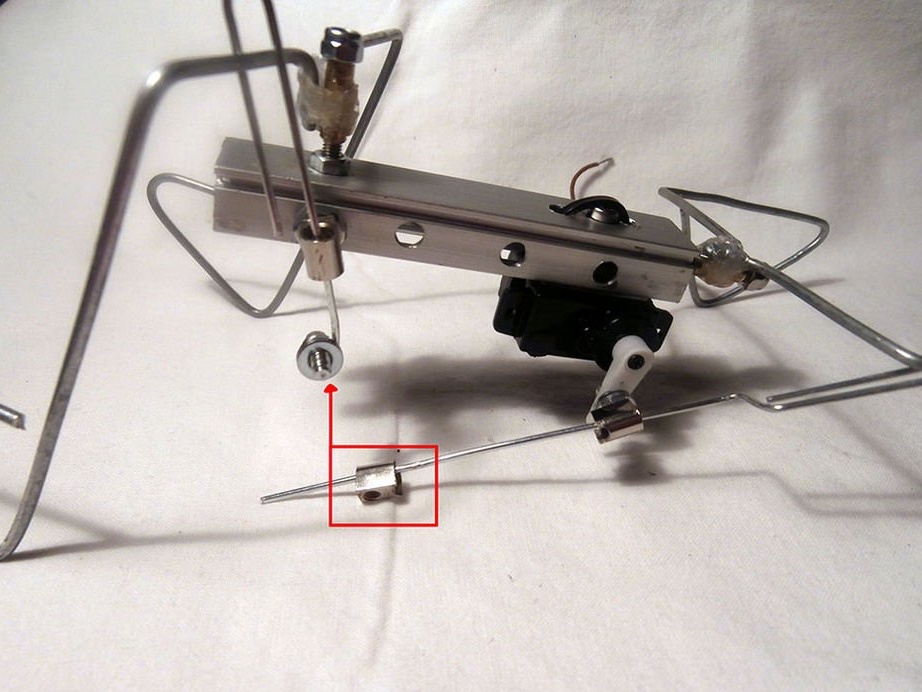
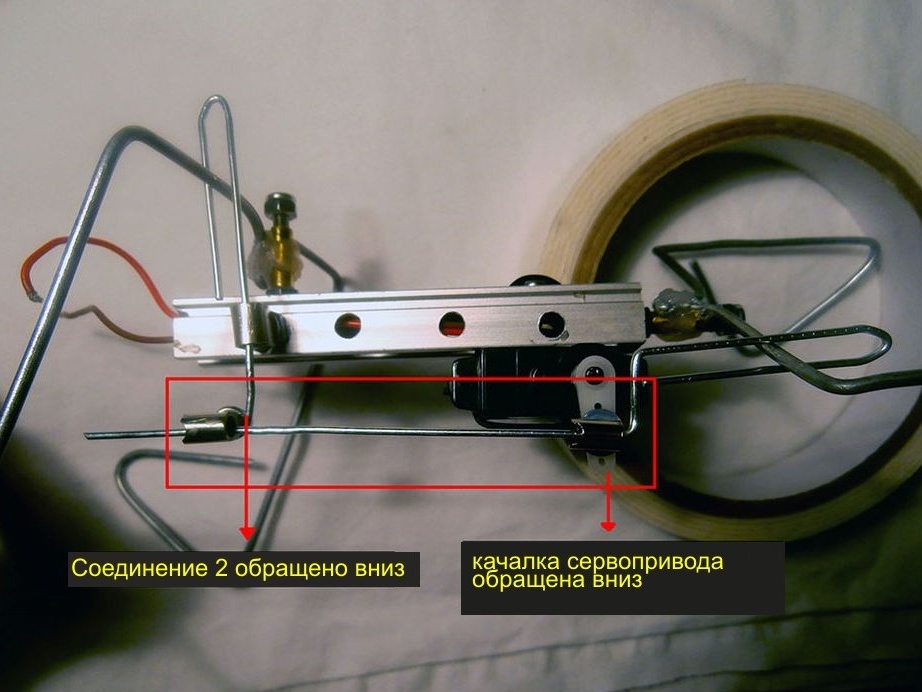
Vaihe 3: Osien kokoaminen
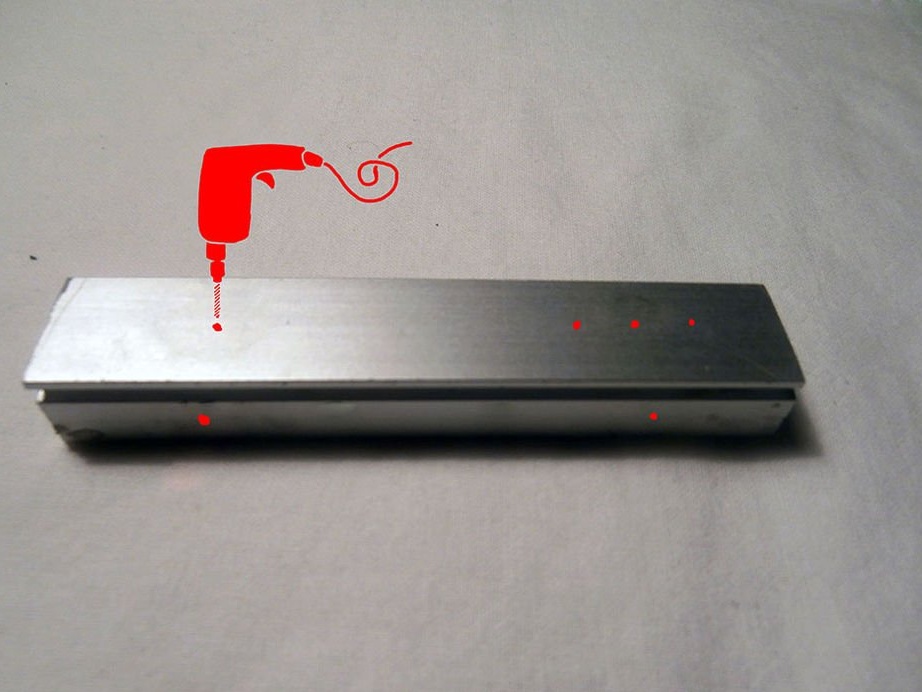
Vaihe 4: Työkalut
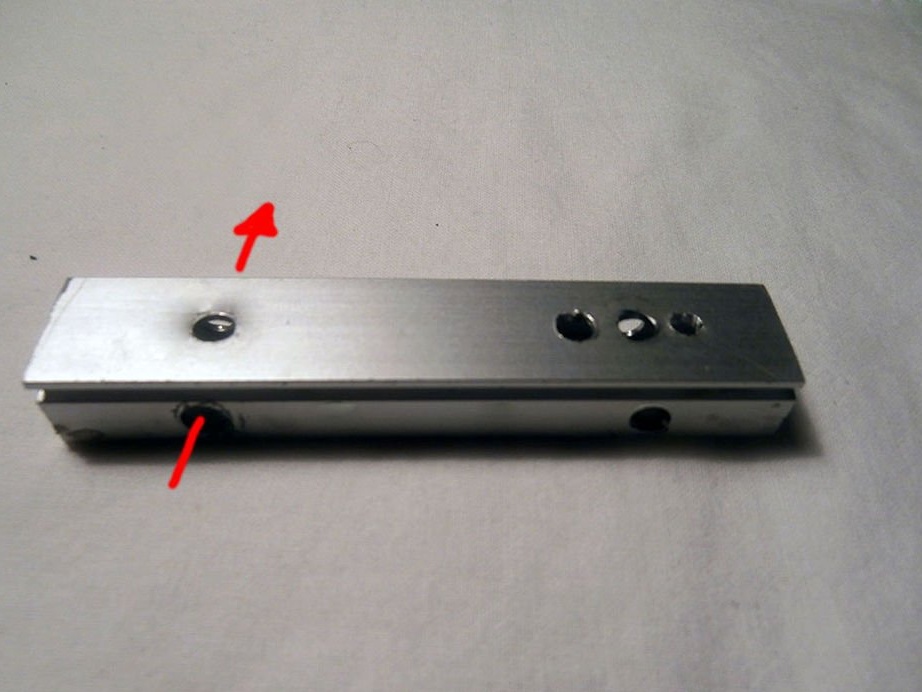
Vaihe 5: Asuminen

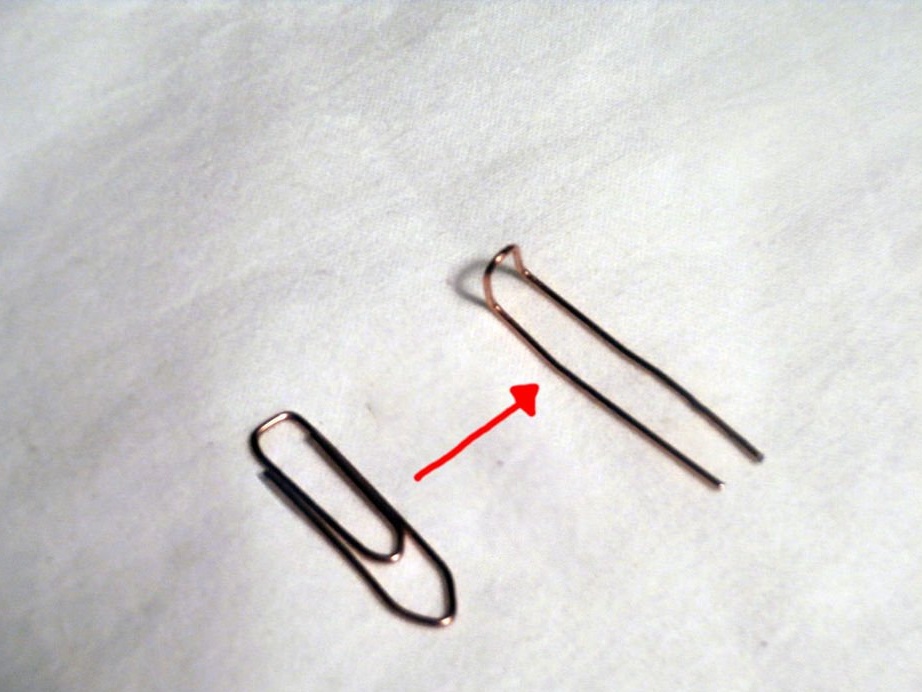
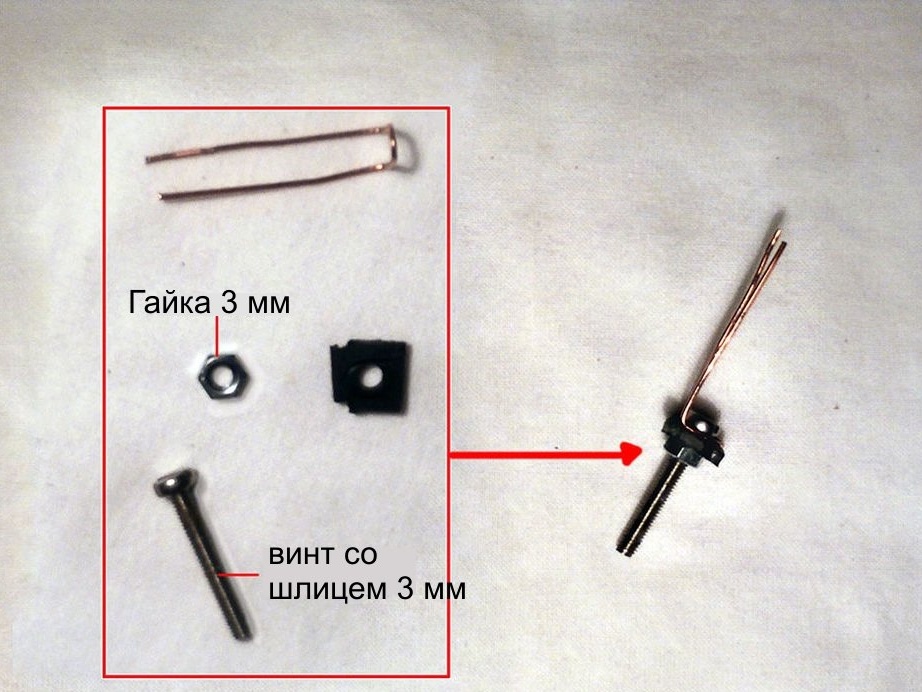

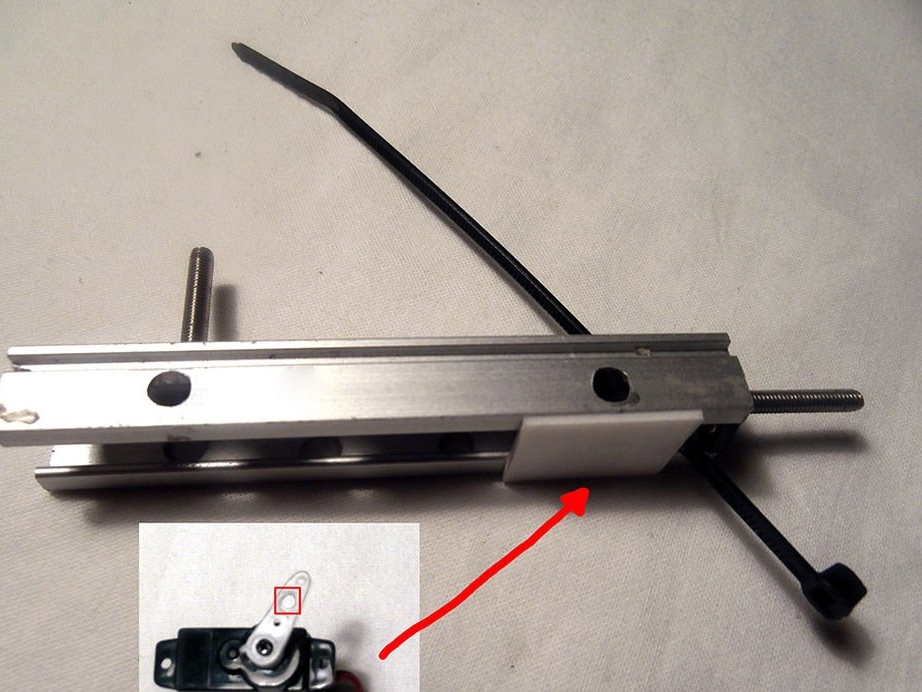
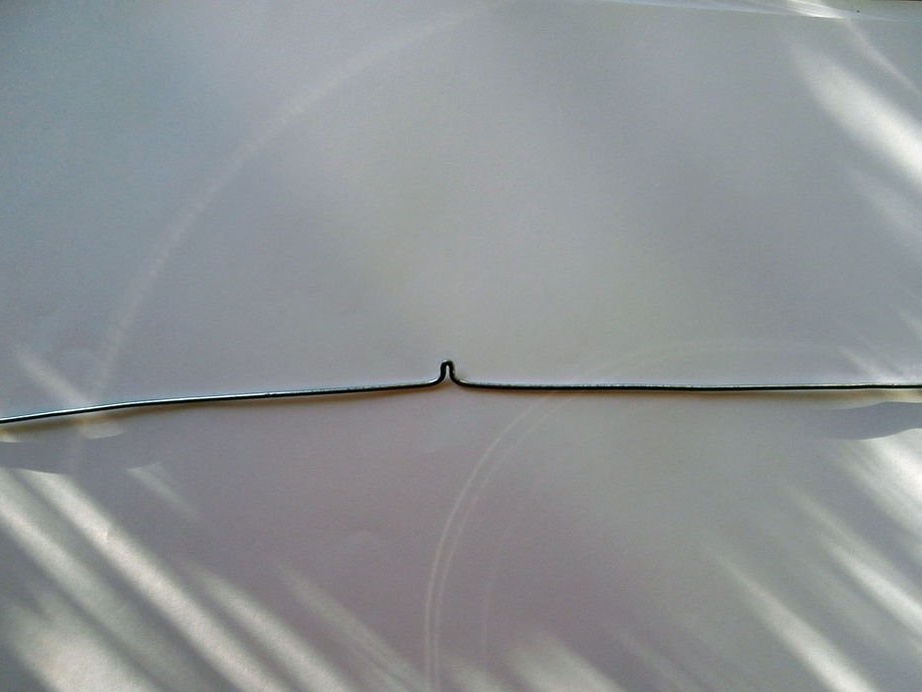
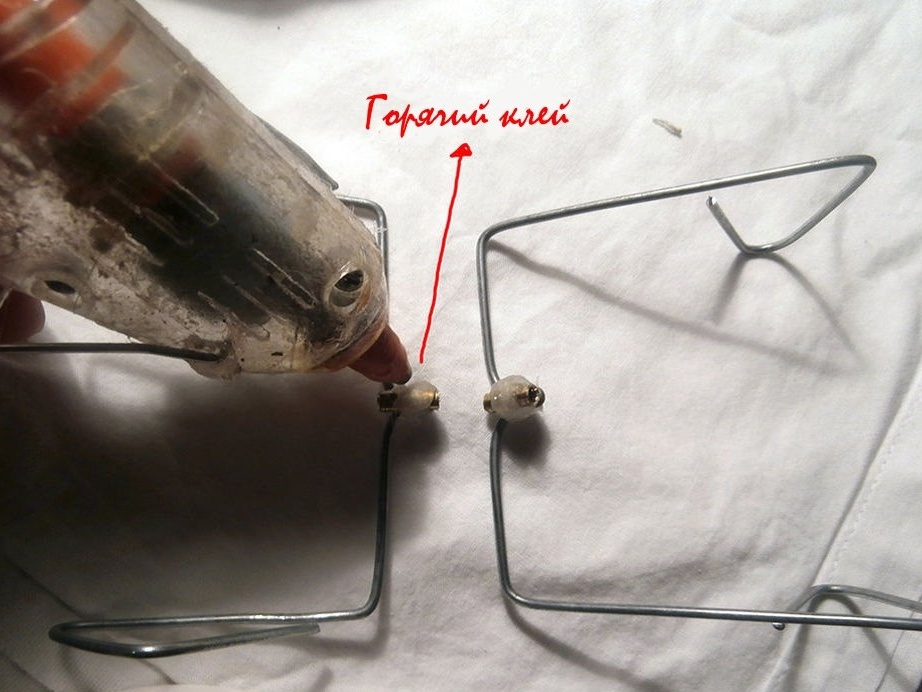
Vaihe 6: etujalat
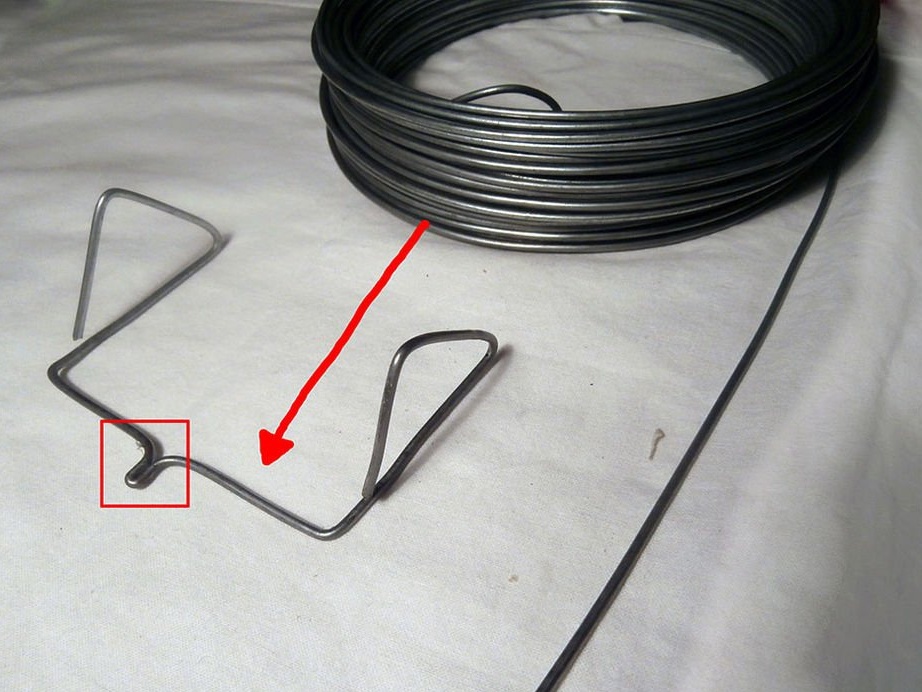
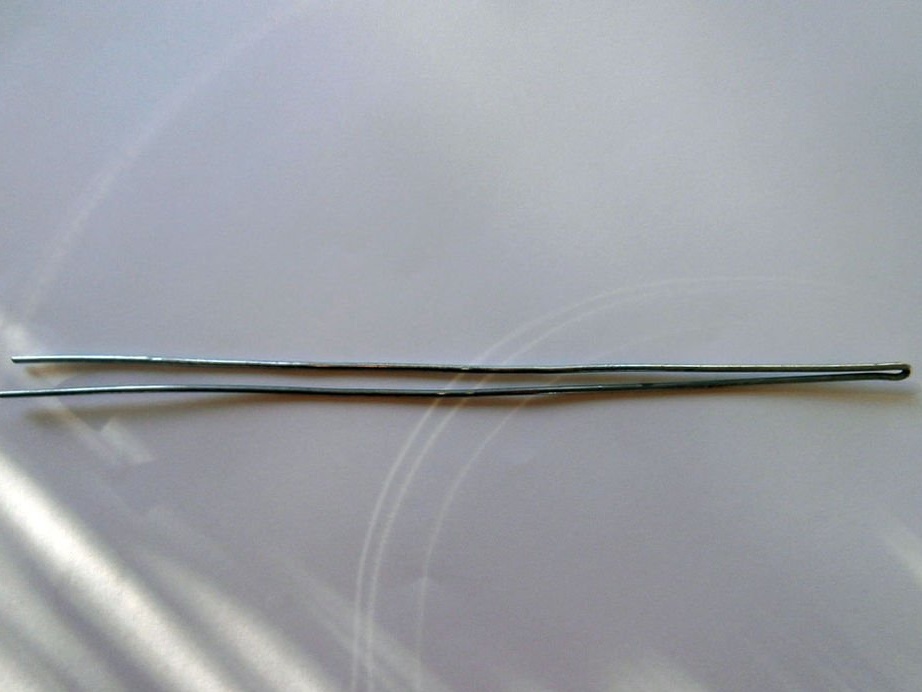
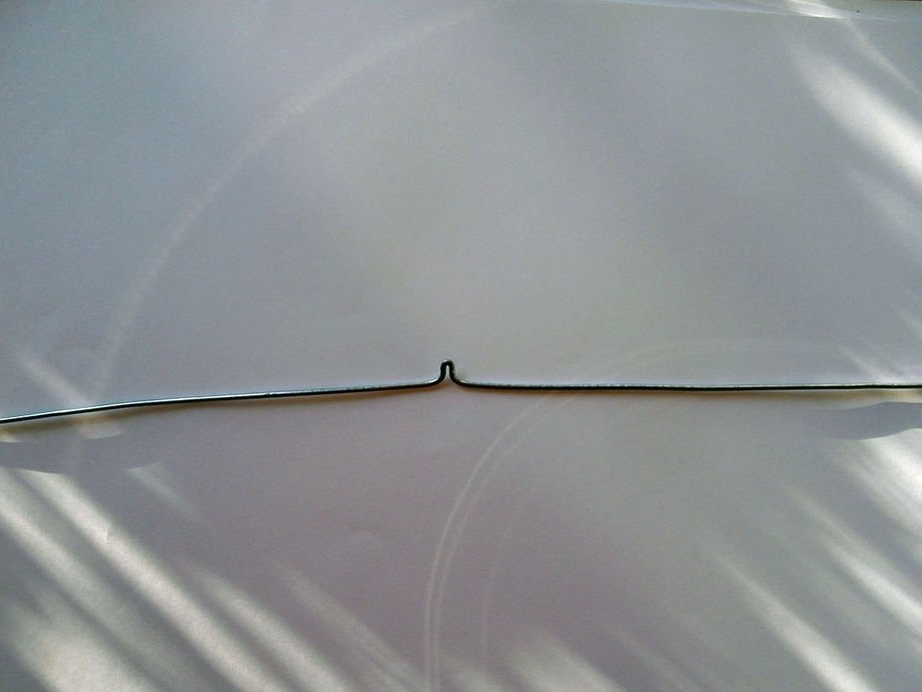
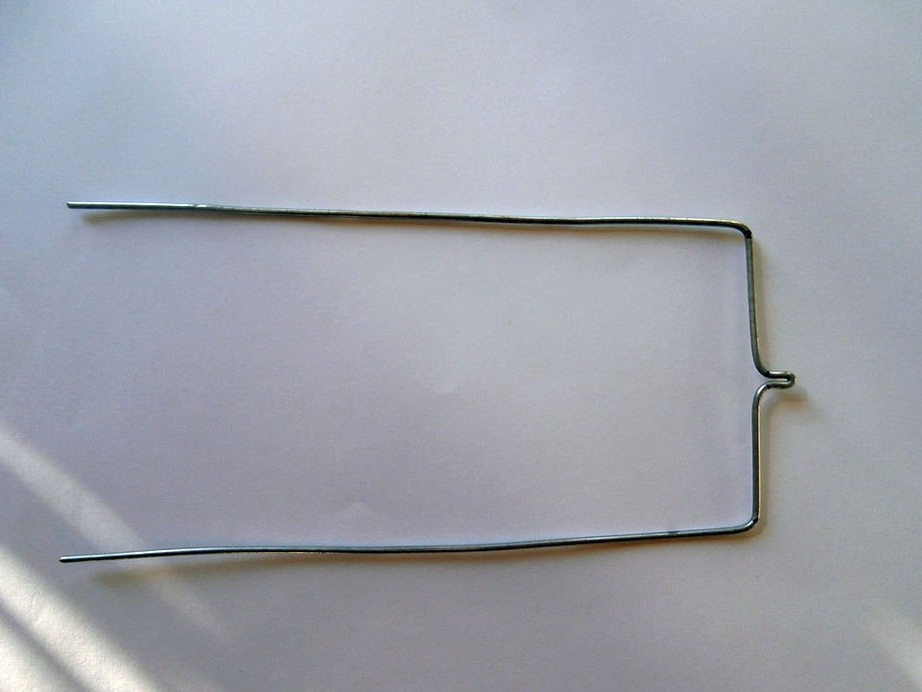
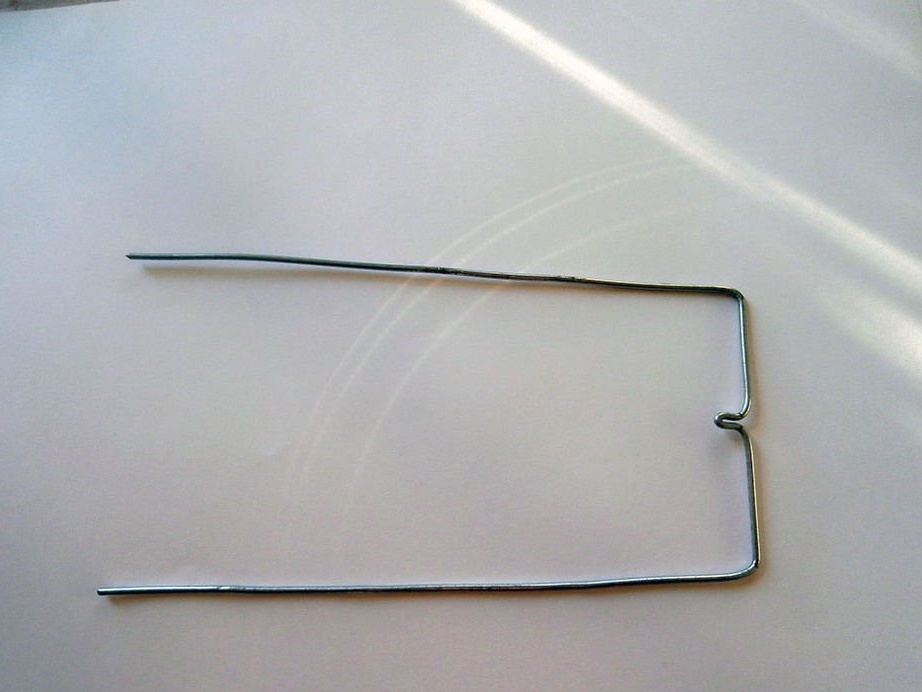
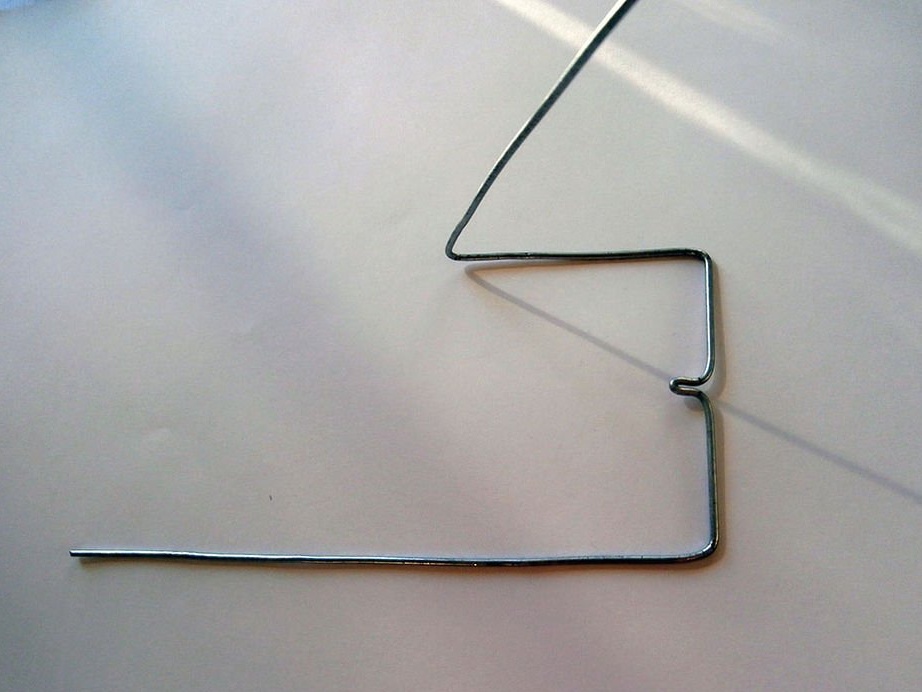
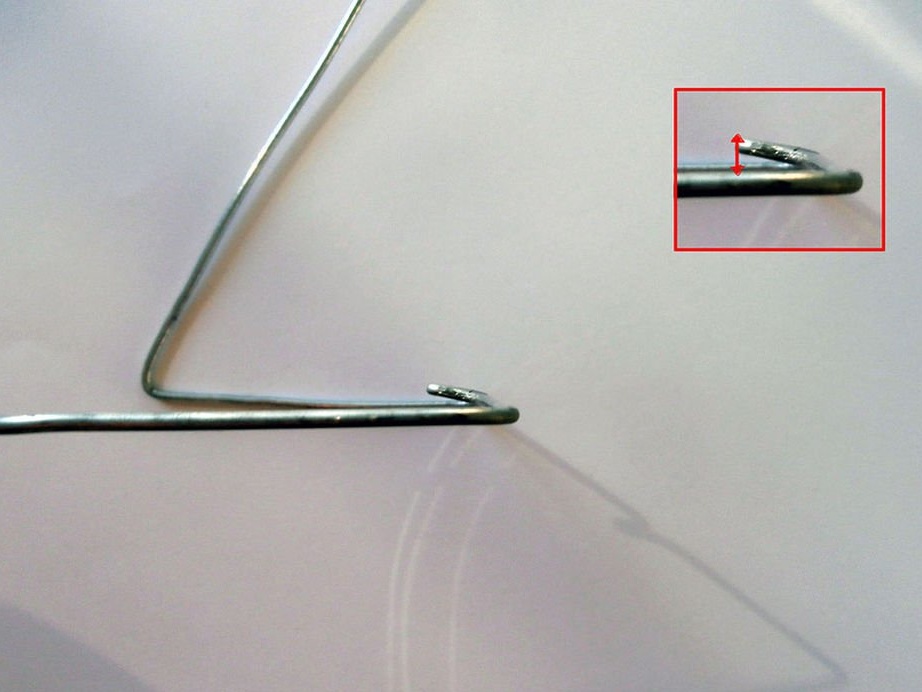
Vaihe 7: Takajalat
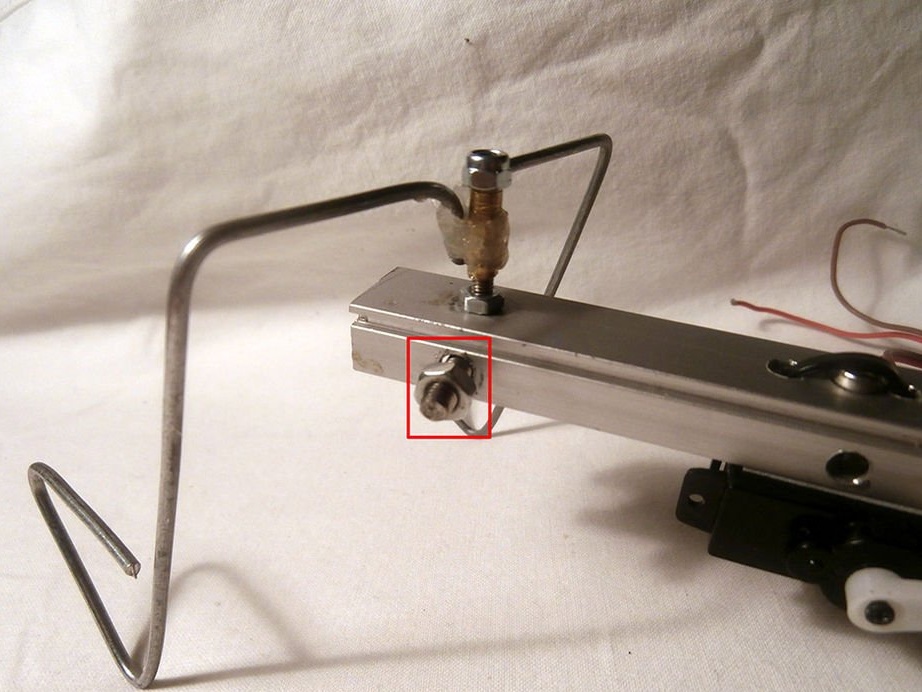
Vaihe 8: Jalkojen kiinnittäminen
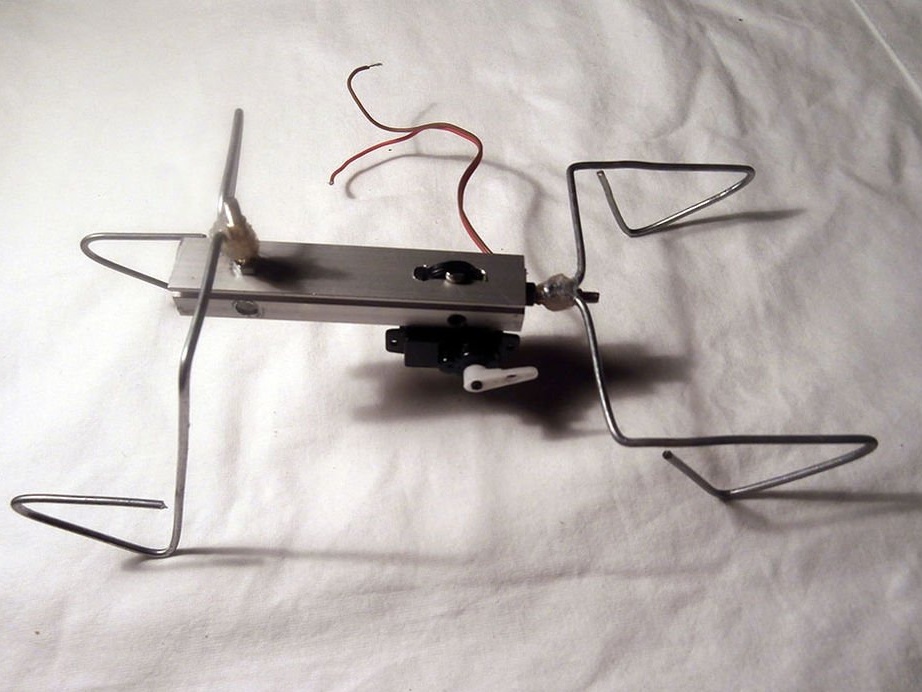
Vaihe 9: Kytkin
Vaihe 10: Kytkinasennus
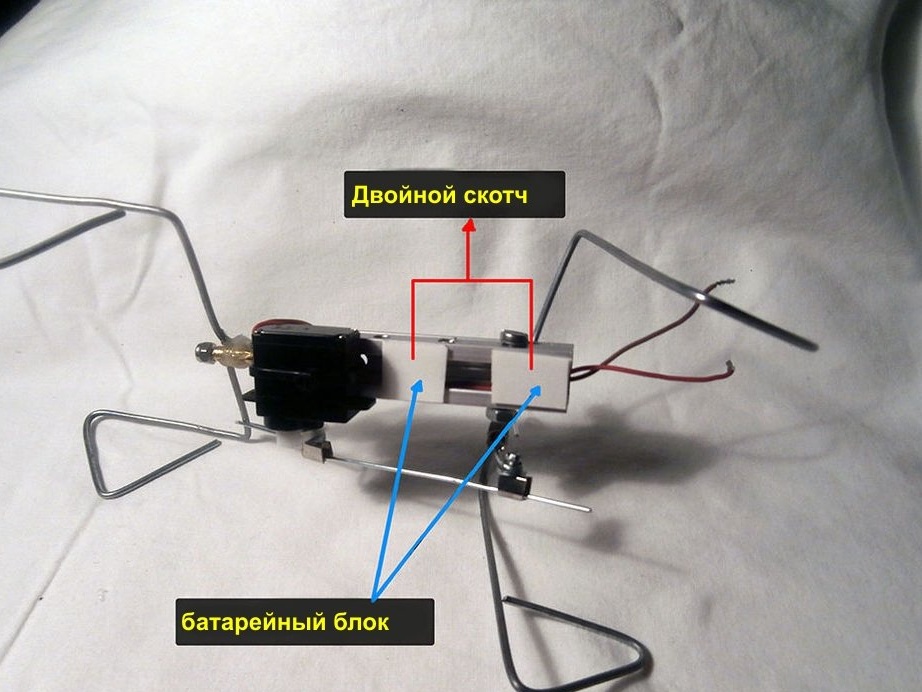
Vaihe 11: viimeinen kosketus
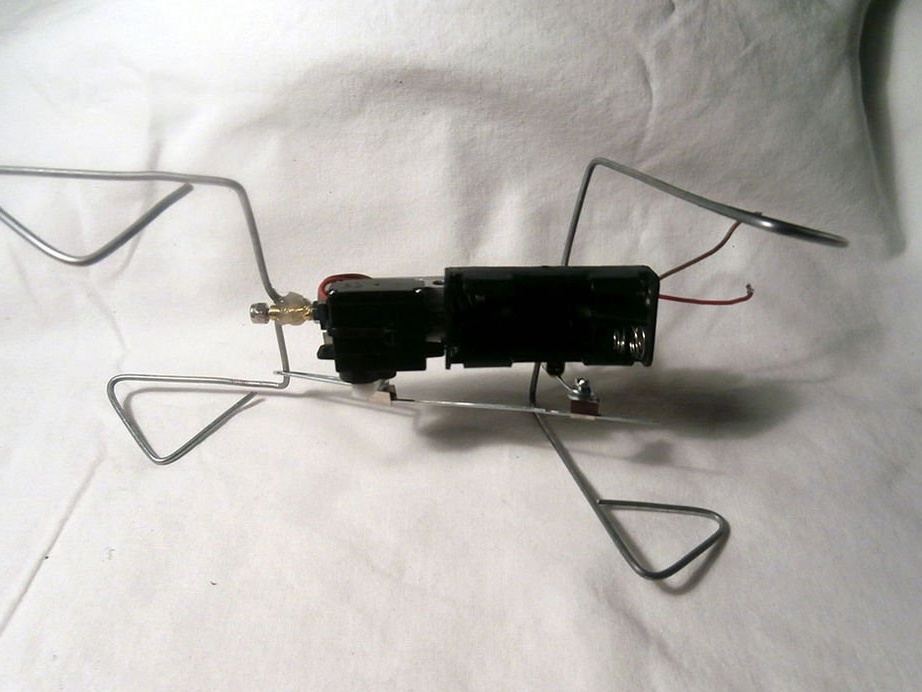
Lopulta johdottaa vain servo ja akut ja robotti Pöllö aloittaa matkan kotisi ympäri :)