
Materiaalit ja työkalut:
- mikrokontrolleri Arduino (tässä kotitekoinen tuote soveltaa Arduino Uno Rev 3);
- Kaksi servosta Parallakselta;
- joystick (myös Parallax);
- piirilevy) pieni);
- liittimet liitäntää varten;
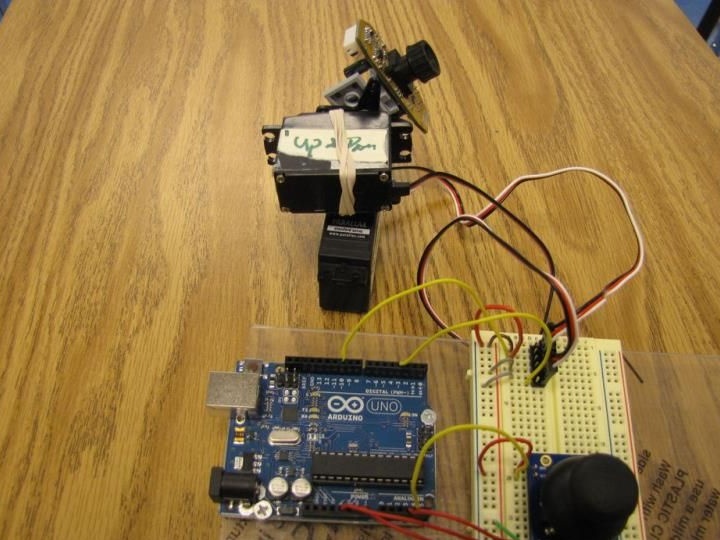
- Laite servomoottorien liikkumisen seuraamiseen (käytetään rikki verkkokameraa ja legokuutioita).
Kotitekoinen kokoonpanoprosessi:
Ensimmäinen askel. Yhdistämme servomoottorit
Kotitekoinen kokoonpanoprosessi alkaa servomoottoreiden kytkemisestä. Alustavan asettelun kokoamiseksi käytetään piirilevyä. Sitten on mahdollista tehdä erillinen suoja. Kuvassa näet kuinka tarkalleen kaikki on kytketty.
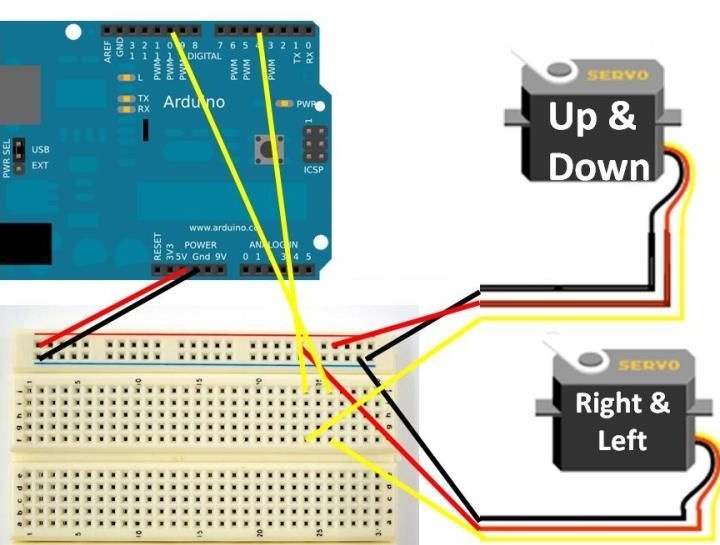
Punainen kaapeli on virta, se kytketään Arduino-ohjaimen 5 V: n napaan.
Musta johdin on miinus (maadoitettu), se yhdistyy Arduino-lähtöeseen nimeltään GND.
Oikean ja vasemman servomoottorin keltainen kaapeli on kytkettävä napaan 11. Joissakin malleissa se voi olla valkoinen.
Samanlainen keltainen ylös- ja alasjohto on kytkettävä napaan 4. Se voi olla myös valkoinen joissakin moottorimalleissa.
On tärkeätä muistaa, että moottorin ohjaamiseen käytettävät signaaliliittimet tulevat PWM-lähtöistä.
Vaihe toinen Kytke ohjaussauva
Kuinka ohjaussauva on kytketty, näkyy kuvassa. Aluksi järjestelmä voi vaikuttaa melko monimutkaiselta, mutta itse asiassa tässä ei ole mitään monimutkaista. Kuten moottoreissa, tässä käytetään johdotuslevyä.
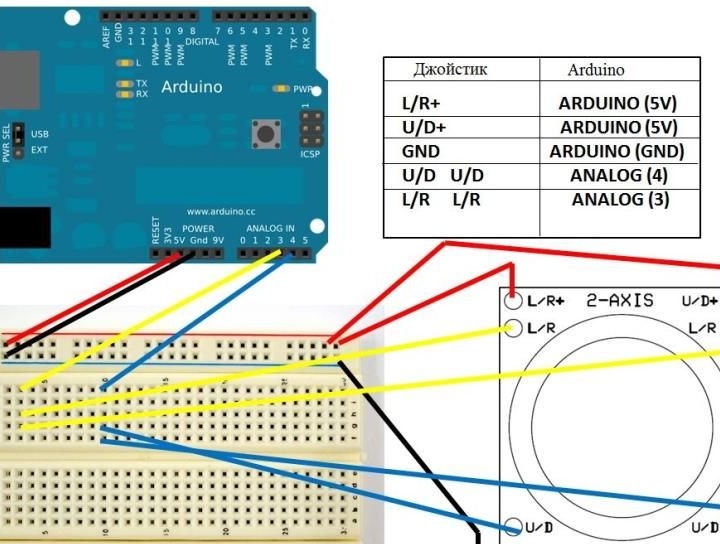
1. Joystick-moduulista löydät ulostulot U / R + ja L / R +. Näiden lähdöjen kautta virta kytketään. Siksi sinun on syötettävä + 5 V jännitettä vastaavasta tapista Arduinoon.
2. Joystickin alla on myös kaksi liitintä, nimeltään L / R ja kaksi U / D-liitintä. Ne on kytkettävä analogisiin lähtöihin A3 ja A4.
3. No, lopuksi, joystickin maan on oltava kytkettynä Arduinon maahan.
Asennuksen jälkeen yhteys on tarkistettava vielä kerran. Useimmissa tapauksissa ongelmia syntyy yhteysvirheiden takia. Tämä on erityisen totta, kun piirilevyä käytetään ja siinä on monia kytkentöjä.
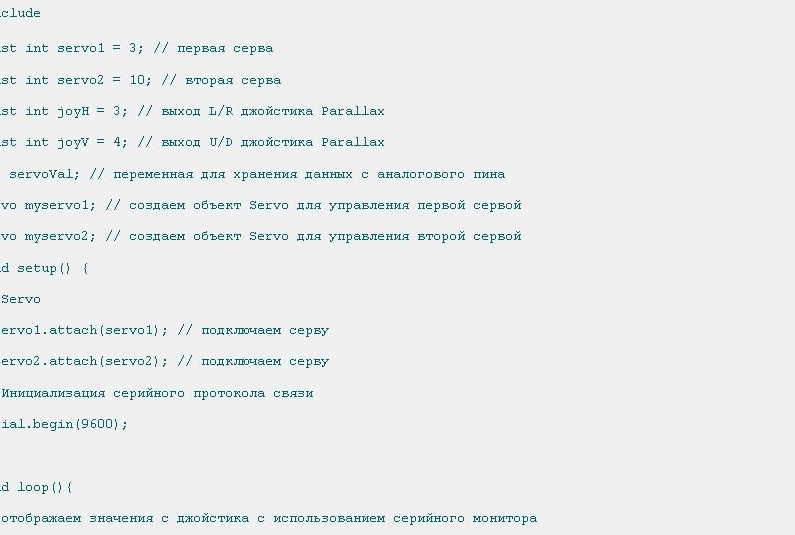
Vaihe kolmeLuonnos Arduinolle
Koodi on hyvin yksinkertainen ja sisältää yksityiskohtaisia kommentteja. Yllä oleva koodi on vain kopioitava Arduino IDE: hen. Kun koodi on ladattu, moottorien ei pitäisi liikkua. Niiden pitäisi alkaa liikkua vasta, kun ohjaussauvan painiketta painetaan.
Mahdolliset ongelmat ja niiden ratkaiseminen
1. Jos moottorit eivät käynnisty, tarkista liitos vielä kerran. PWM-lähtöjä käytetään moottorien kytkemiseen, ja analogisia ulostuloja käytetään ohjaussauvojen kytkemiseen.
2. Tapahtuu, että heti koodin lataamisen jälkeen moottorit alkavat täriseä. Näin tapahtuu, jos liität nastat U / D + L / R + väärin. Yhteys on tarkistettava huolellisesti. Jotta levy ei polttaisi testin aikana, se on irrotettava tietokoneesta.
3. Jos kaikki tarkistetaan uudelleen, mutta moottorit eivät vieläkään halua toimia, voit yrittää kytkeä ohjaussauvan uudelleen. Se on irrotettava piirilevyltä ja asennettava sitten takaisin jollain vaivalla. Joystick-liittimien tulee mennä hyvin asetteluun.
Jos kaikki osoittautui, voit nyt aloittaa minkä tahansa kotitekoisten esineiden luomisen ohjauksella ohjaussauvan avulla. Voit esimerkiksi tehdä robotin, jota voidaan ohjata joystickillä, ja paljon muuta.