


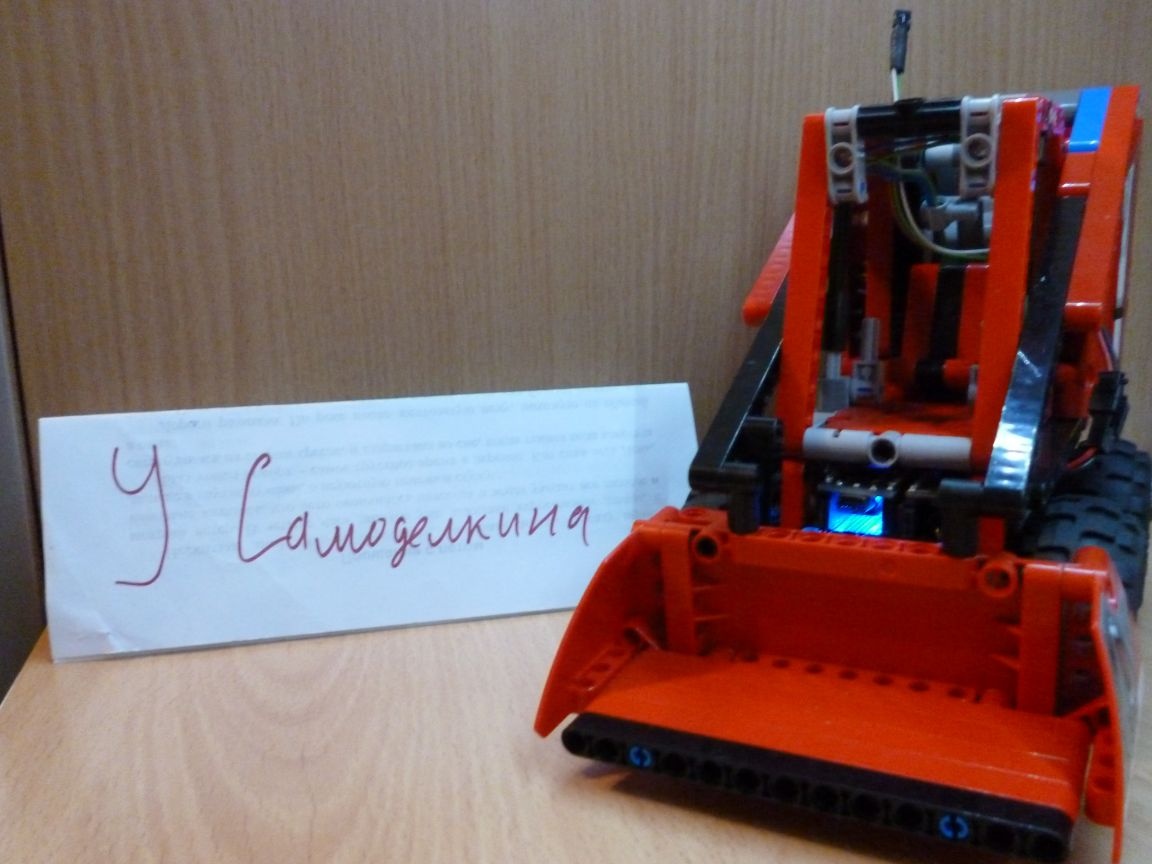
Joten ottaen lego-tekniikan poikaltani ja kotona Työläs Nano alkoi yhdistää näitä suunnittelijoita.
Tarvitsemme:
- Lego Technic (sarjat 42029 ja 42033)
- Arduino Nano (linkki taululle)
- DRV 8833
- 2 servoajoa SG-90
- IR-vastaanotin
- vaihdemoottori
- 2 LEDiä
- 2 vastuksia 150 ohmia
- Kondensaattori 10v 1000uF
- 2 yhden rivin kampaa PLS-40
- 2 PBS-20-liitintä
- Induktori 68mkGn
- 4 NI-Mn 1.2v 1000mA -paristoa
- Liitin isä-äiti kahden navan johdolla
- Homutik
- Eriväriset johdot
- juote
- Rosin
- juotosrauta
- Pultit 3x40 ja mutterit ja aluslevyt
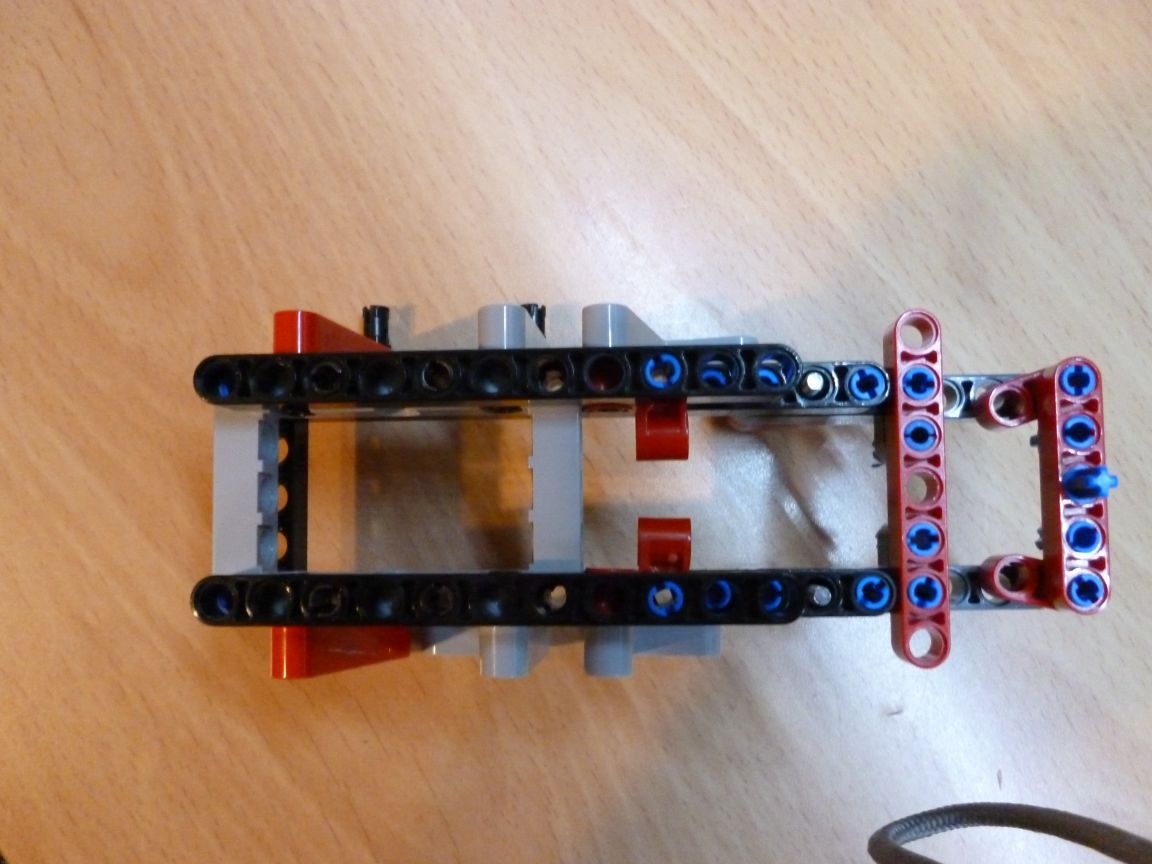
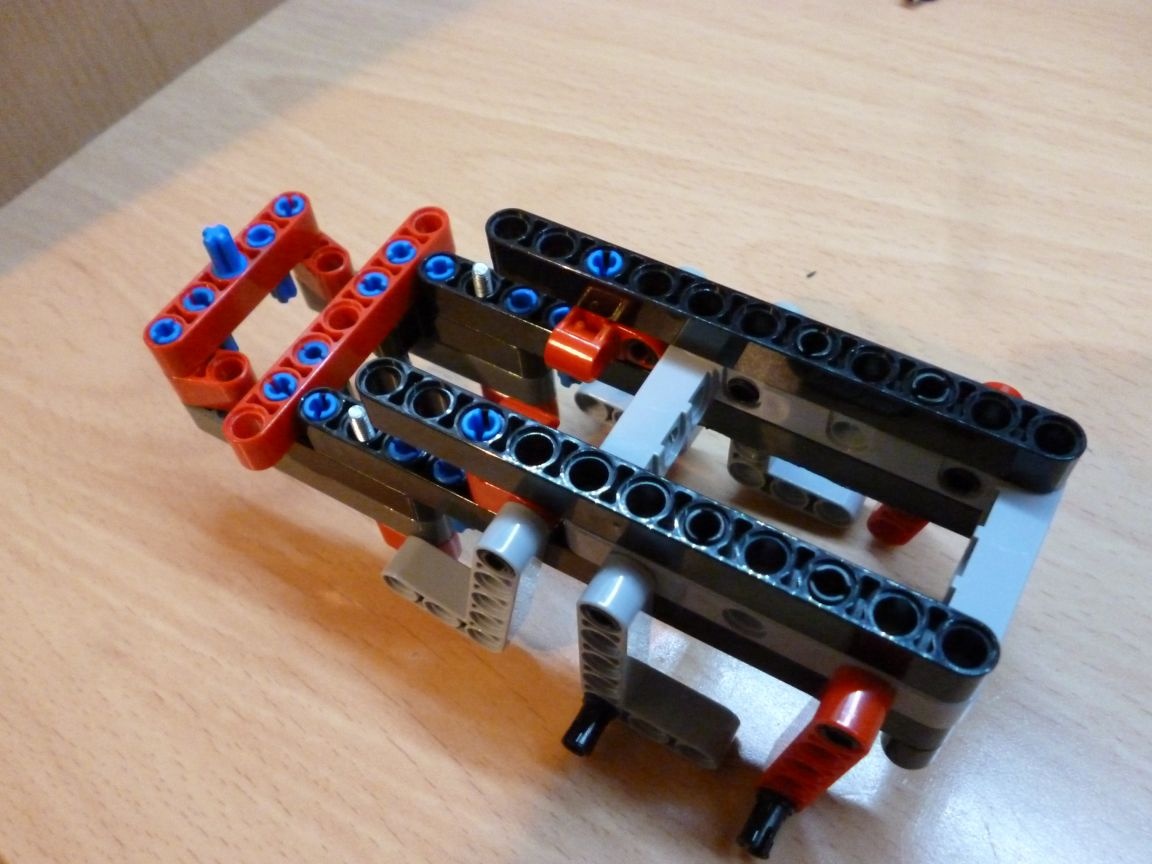
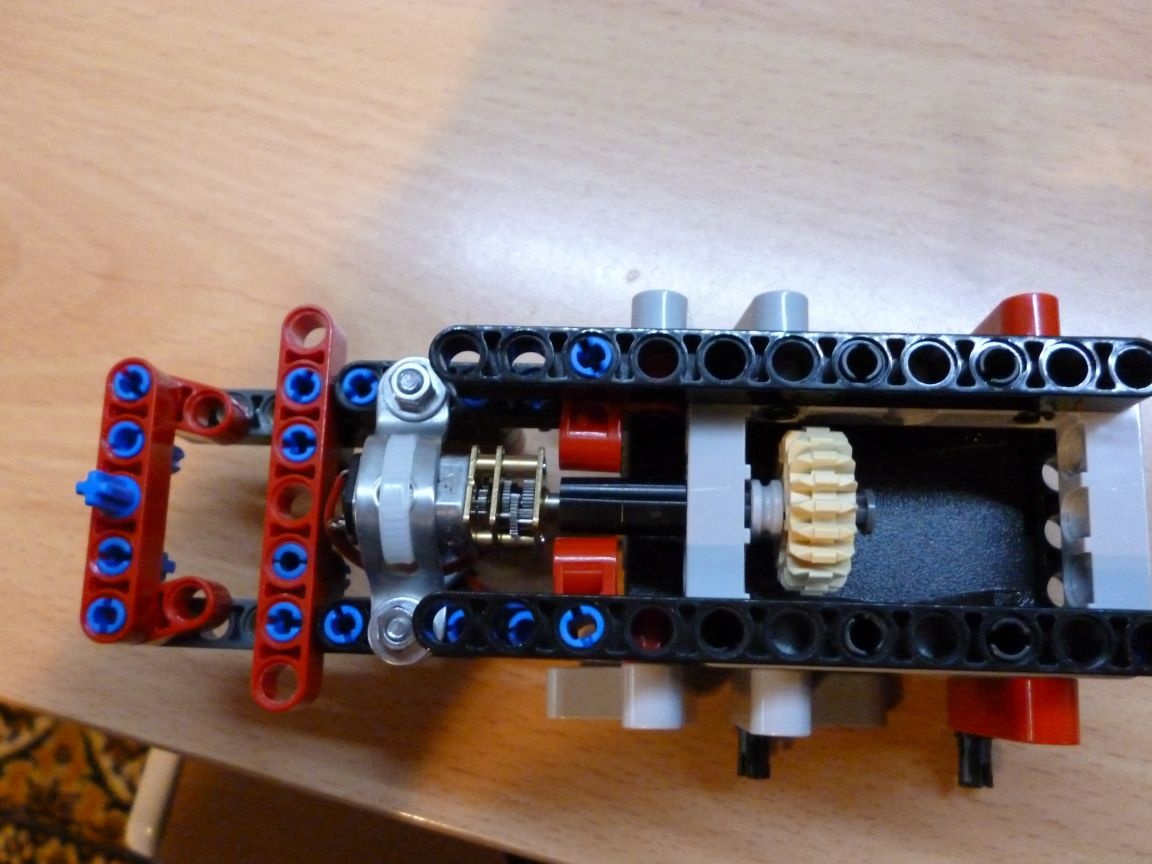
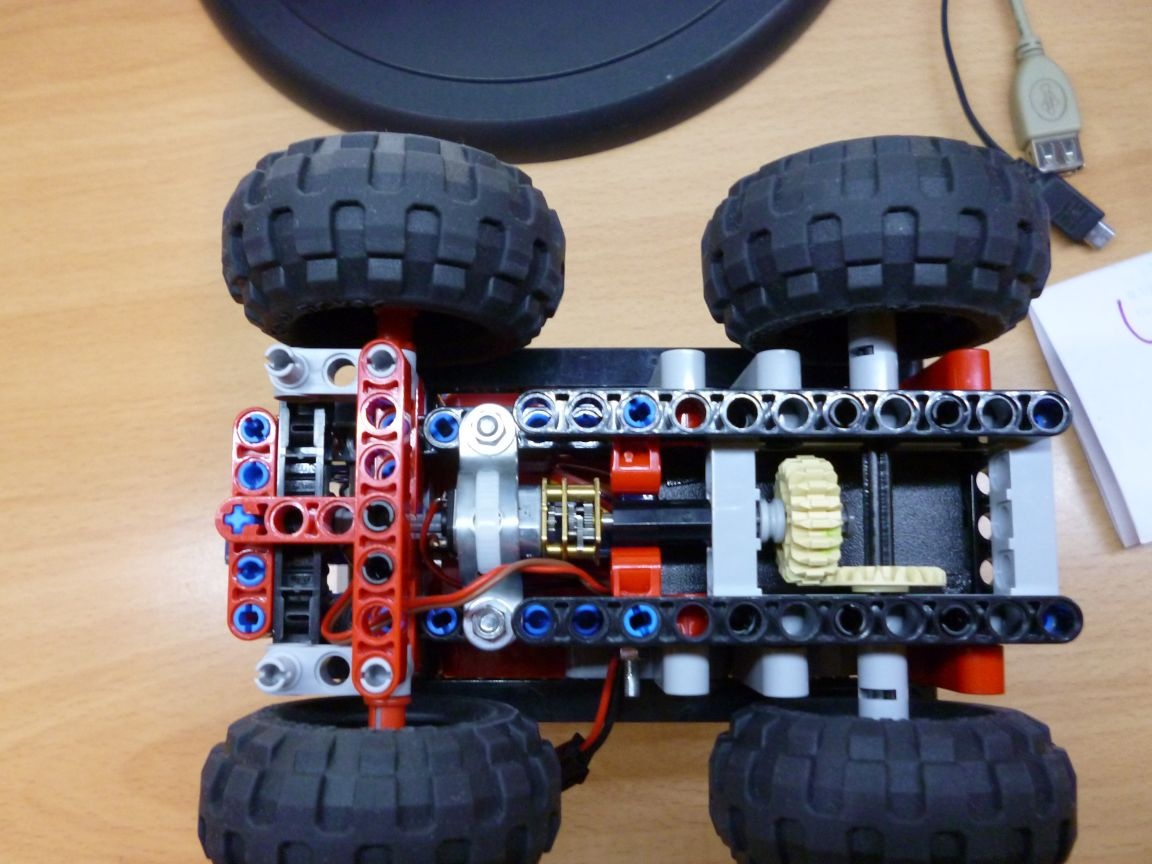
Vaihe 1 koota alusta ja vetoakseli.
Voit koota minkä tahansa alustan Techniciltä, joka tapauksessa se osoittautui näin.
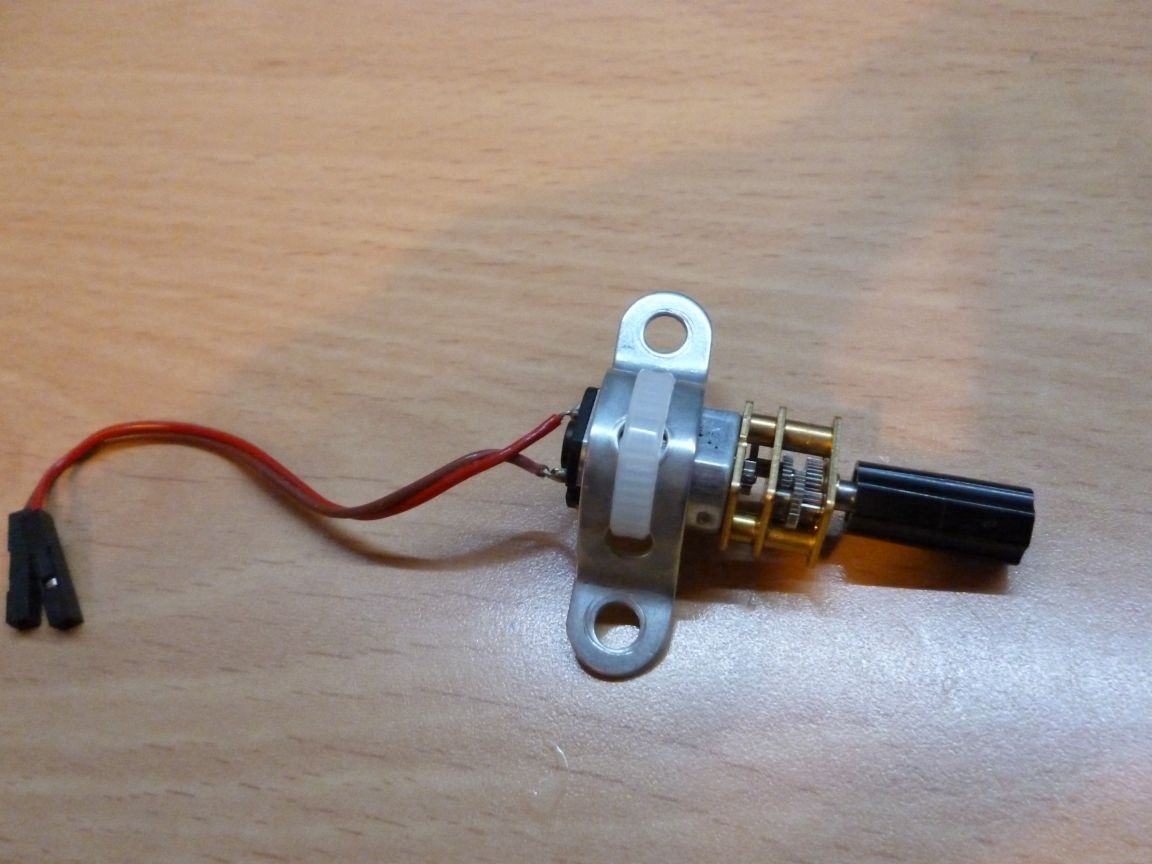
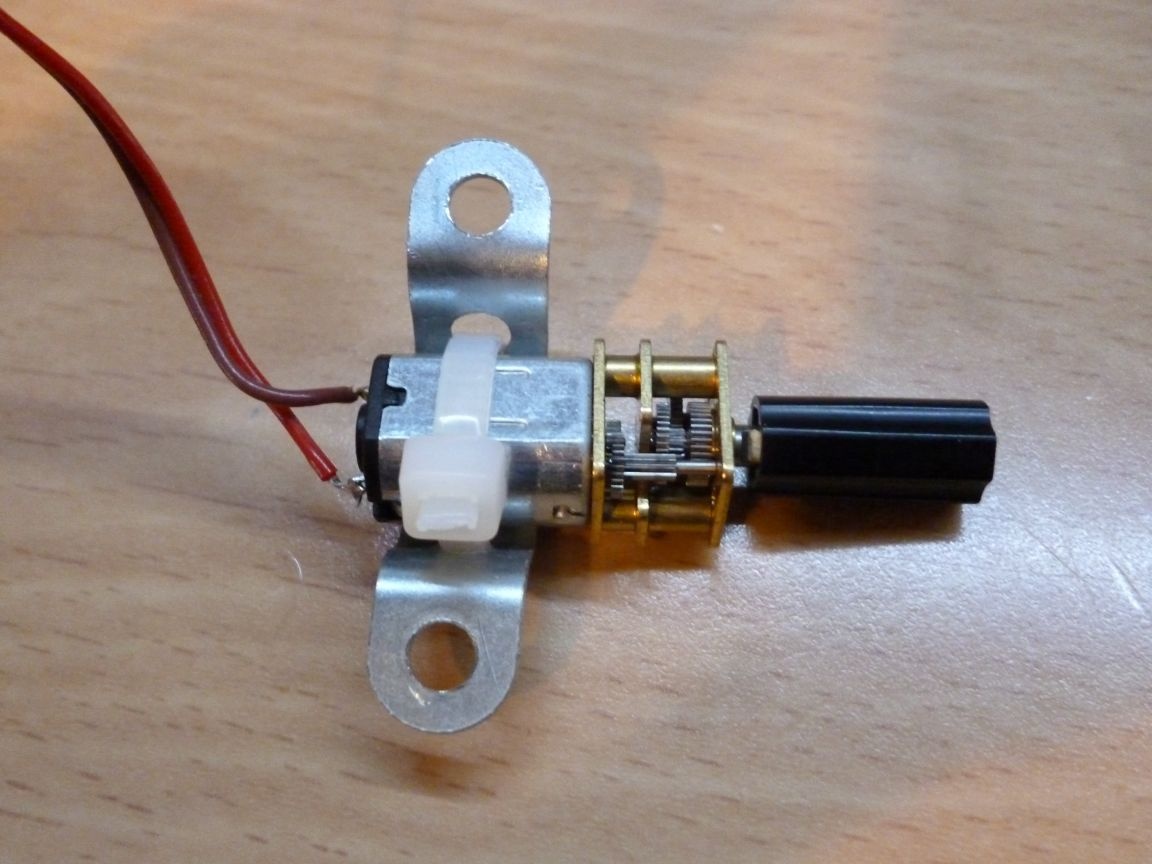
Vaihdemoottorin kytkeminen suunnittelijan osiin on vain ongelma. Päätin tämän seuraavasti: laita vaihdemoottorin akselille kytkentäholkki ja työnsi romu ottelusta kiinnitystä varten. Vaihdemoottorin asennukseen käytettiin rauta-suunnittelijan ja puristimen metallimuovia. Kävi ilmi seuraavaa:
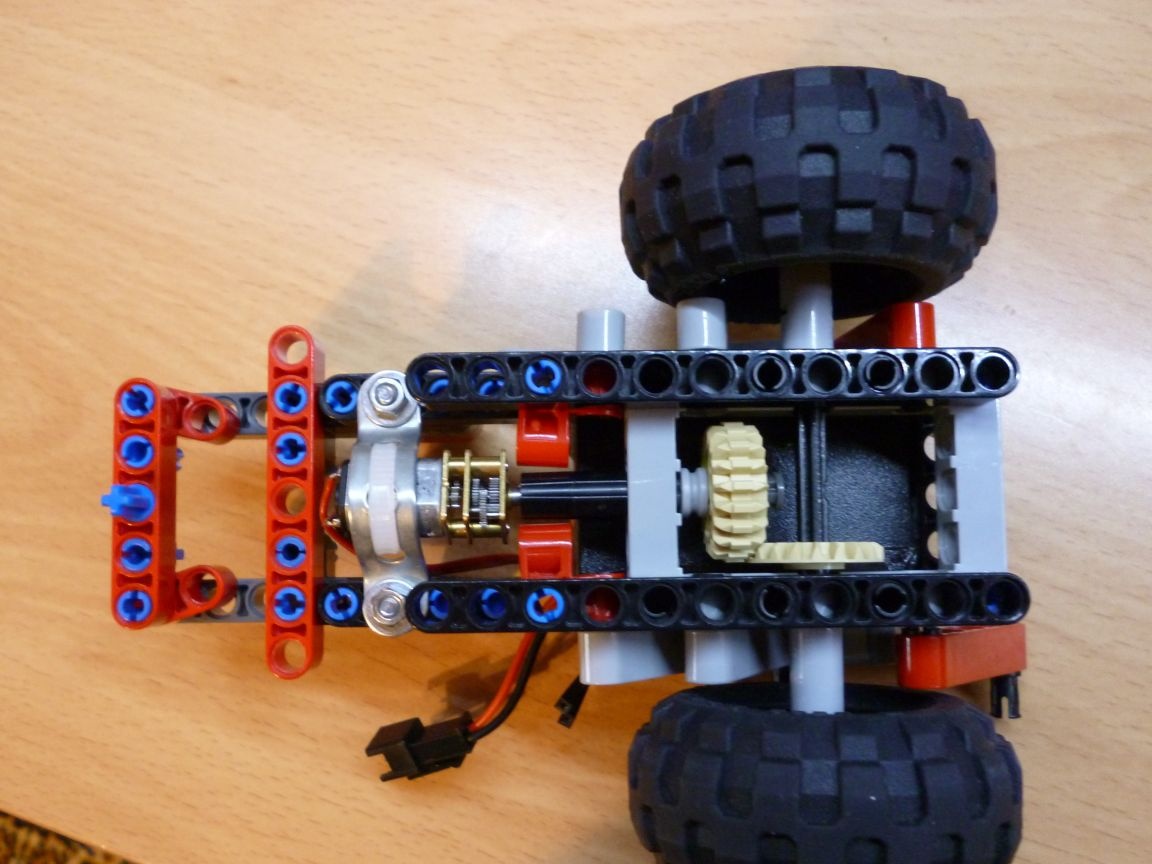
Seuraavaksi asennamme tuloksena olevan mallin runkoon 3x40-ruuveilla:
Ja laita pyörät:
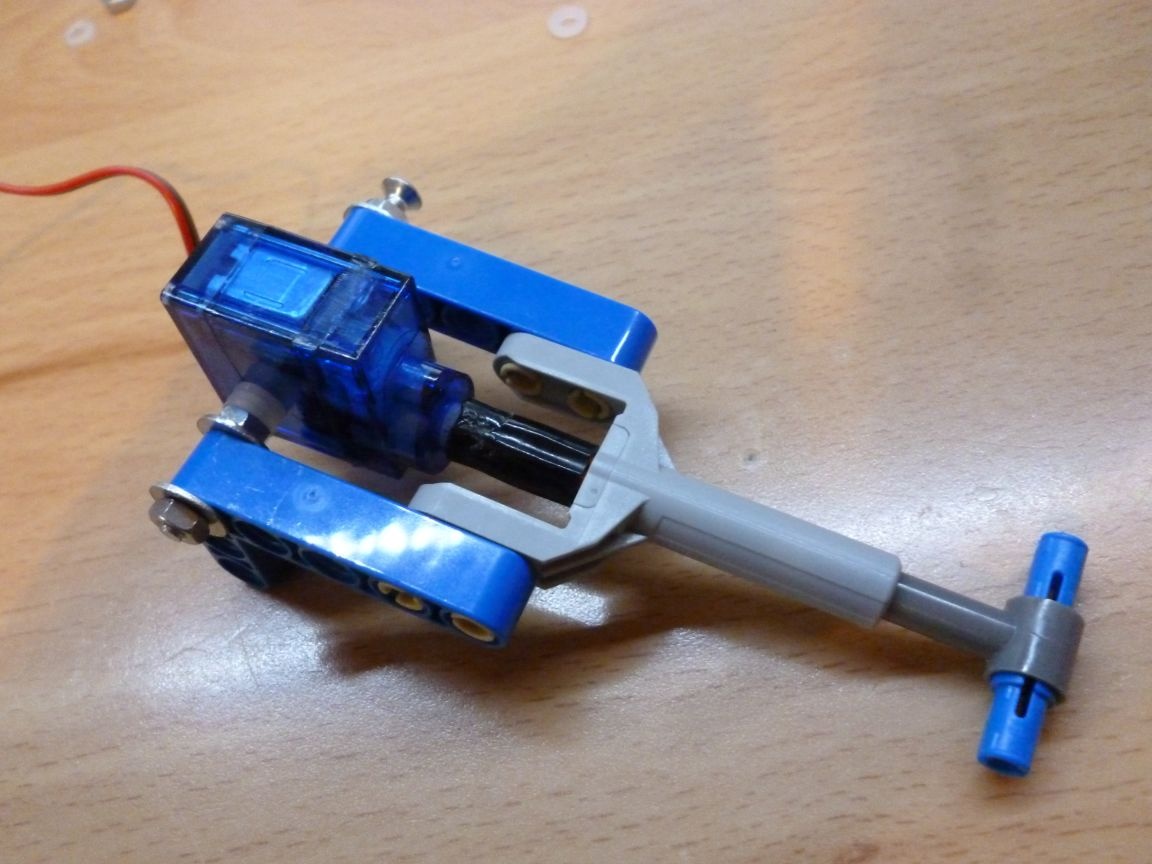
Vaihe 2 kääntöpyörät
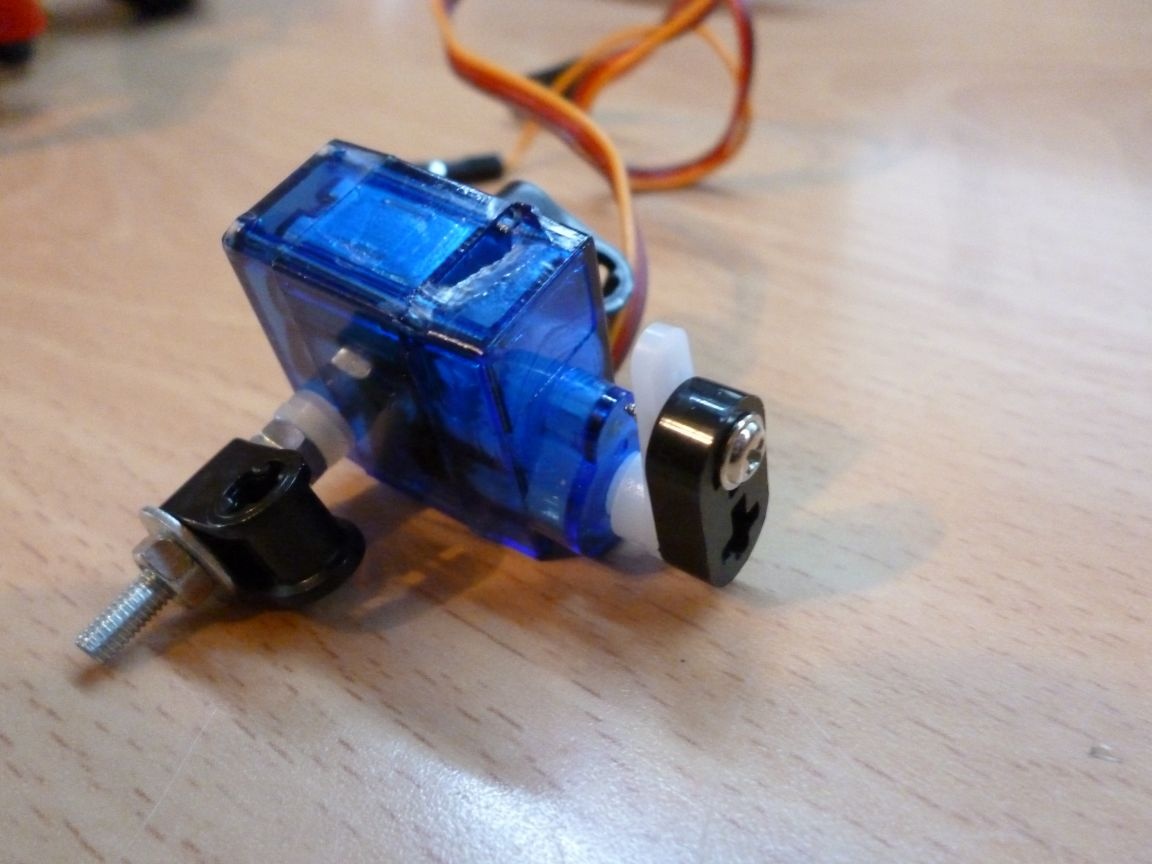
Kiertämisen suorittamiseksi otettiin servo SG-90. Poraaminen on välttämätöntä, jotta sisäosat eivät kosketa, läpimitaltaan reikä, jonka halkaisija on 3,2 mm tai leikattu vain paperitavaralla.

Työnnämme pultin tehtyyn reikään ja kulmat reunoja pitkin ja kiinnitämme muttereilla:

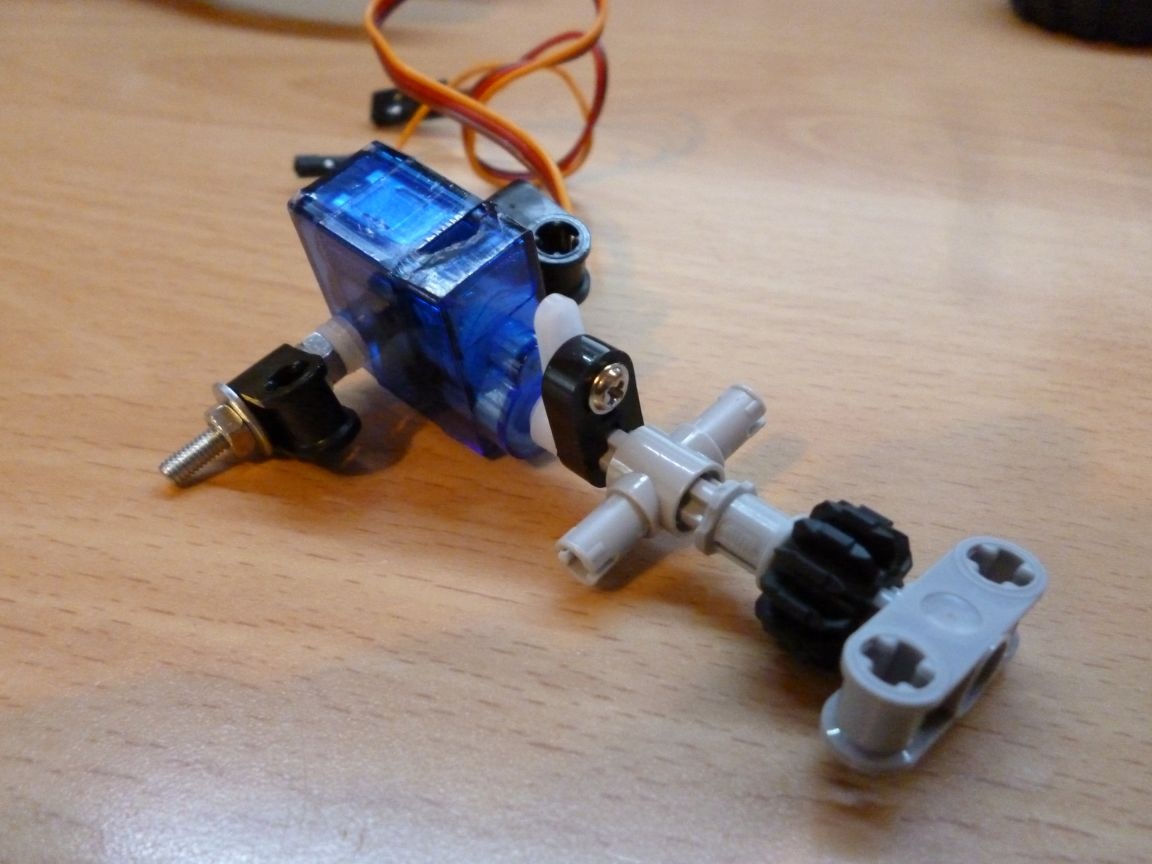
Servoakselille laitamme vivun ruuvilla ruuvilla osilla legoa:
Ja lopuksi kääntökokoonpano:
Laitamme rungon päälle:

Laita pyörät:
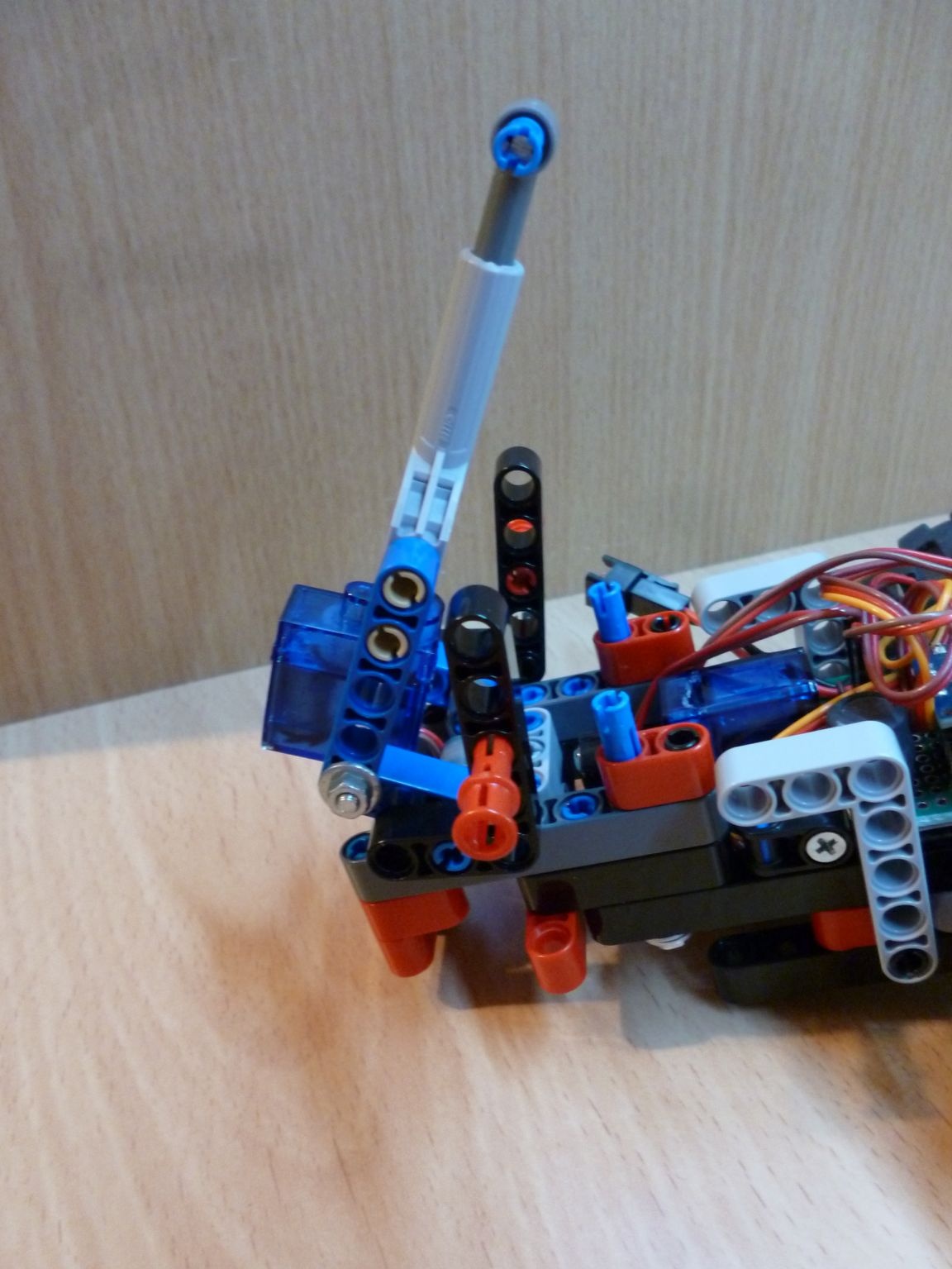
Vaihe 3 nostolaite.
Kauhan nostamiseksi otettiin modifioitu servo SG-90. Sen koko muokkauksen tarkoituksena on poistaa sisäinen ohjain ja juottaa johdot suoraan moottoriin, jotta vaihdemoottori saadaan ulos servoajasta, ts. Siten, että se voi pyöriä kokonaan. Samoin kuin ensimmäisessä servossa, sinun on tehtävä läpivientireikä asennusta varten:
Asenna runkoon:
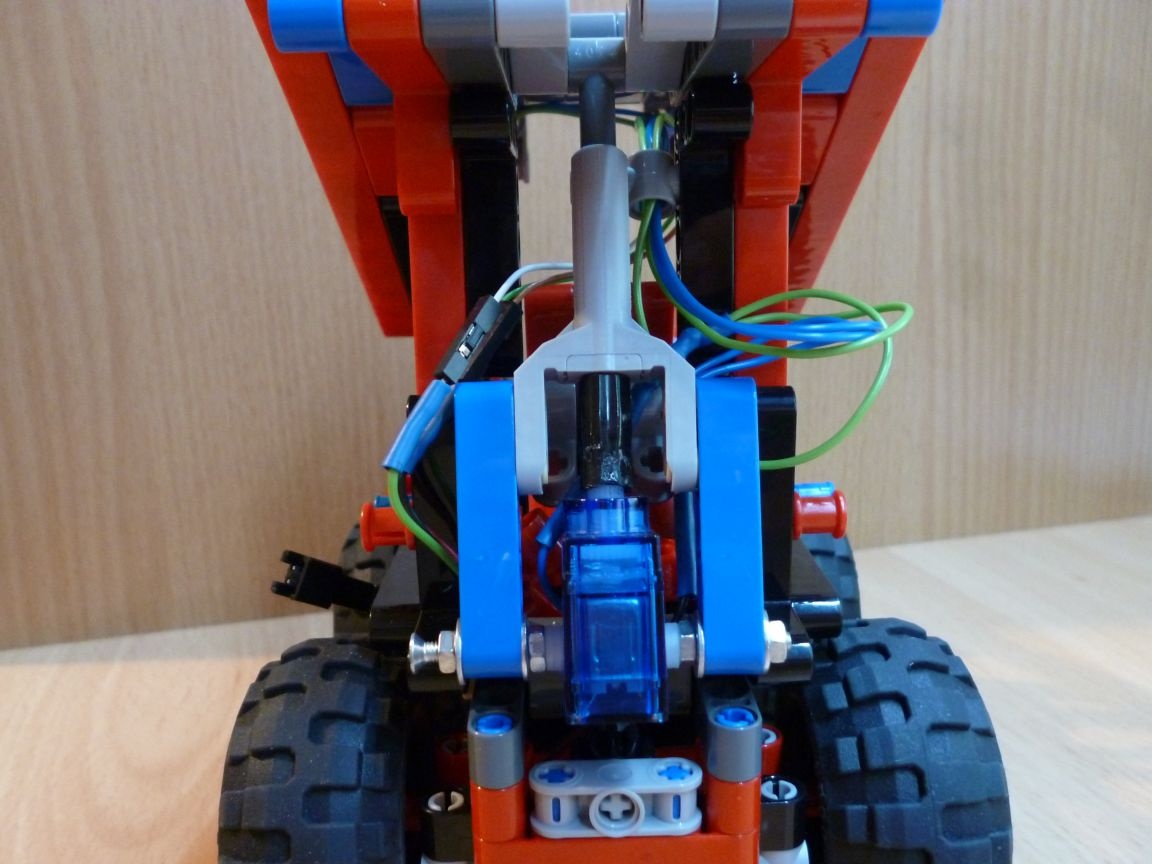
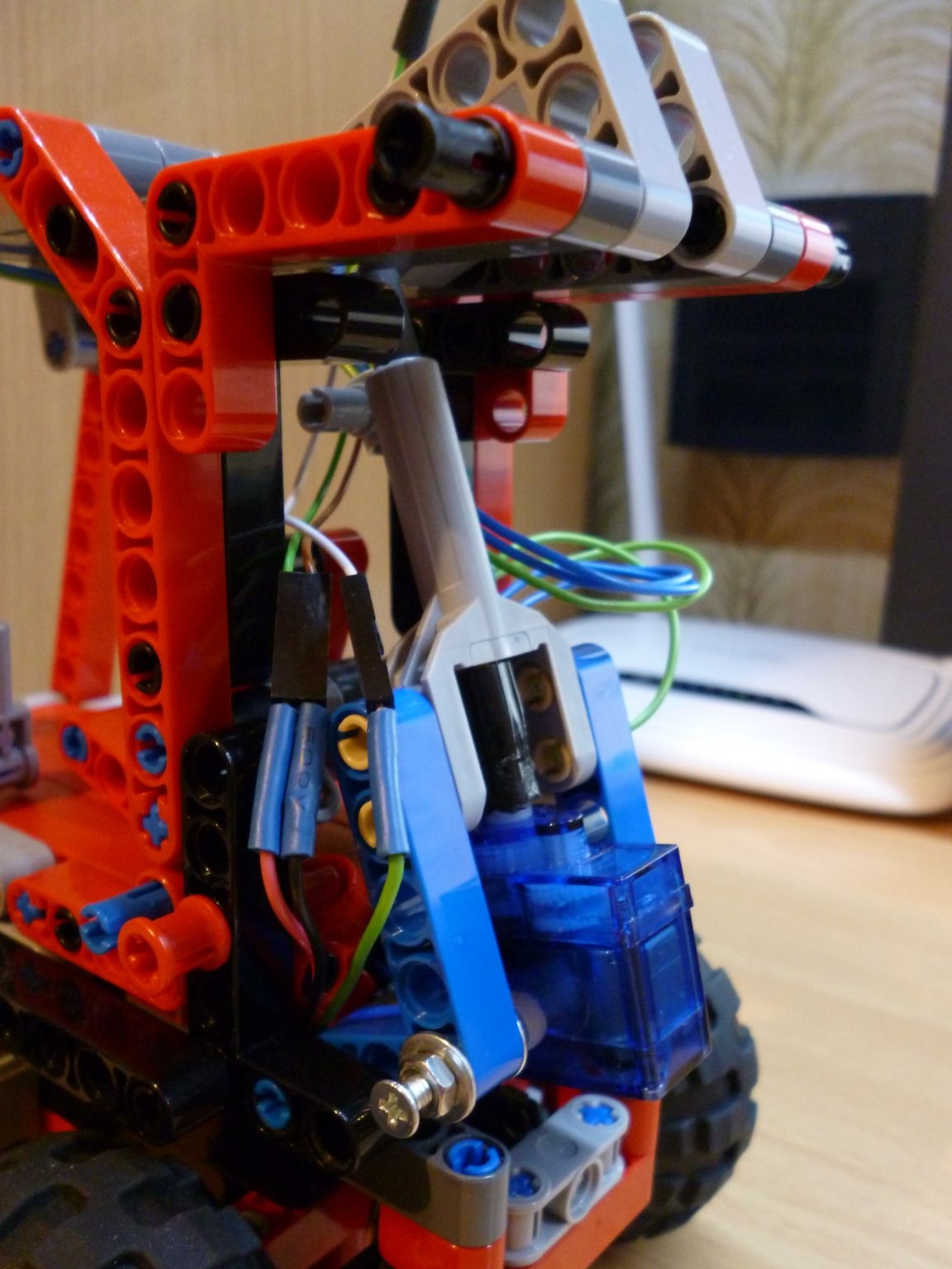
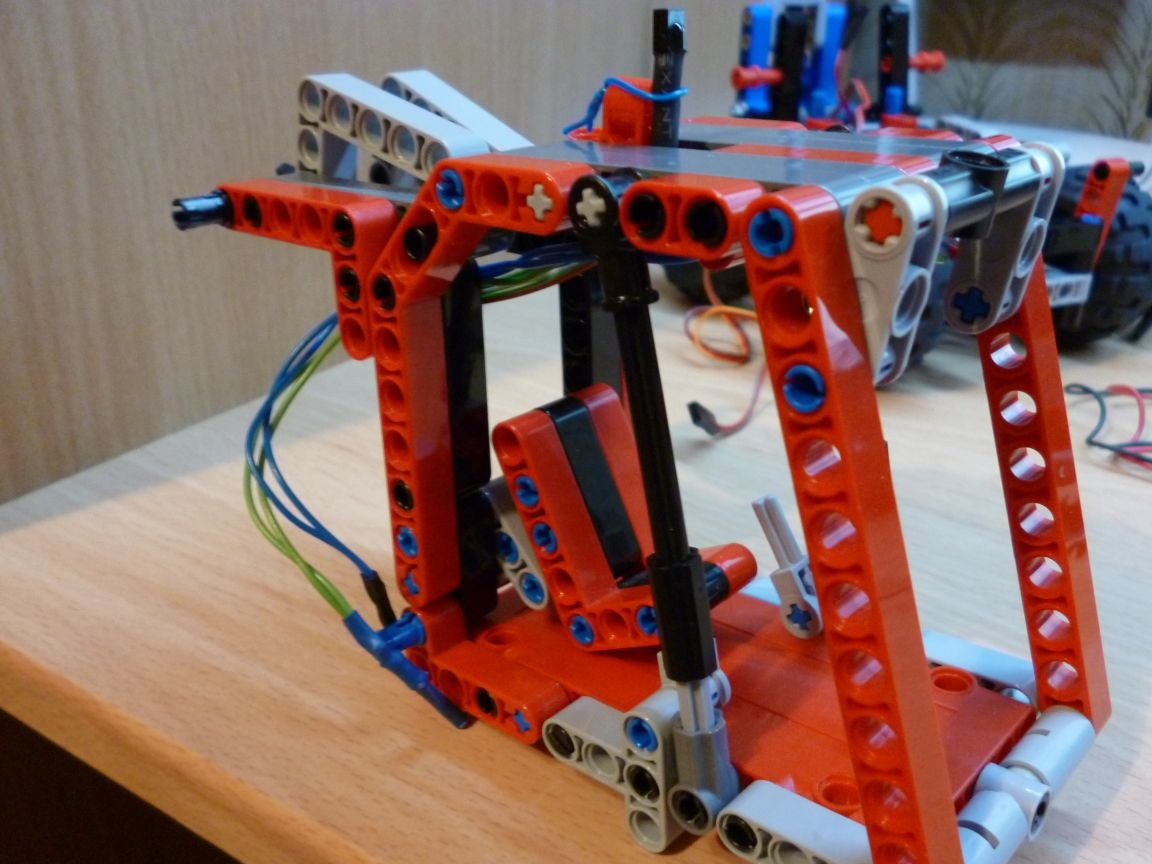
Vaihe 4 ohjaamo.
Ohjaamo on koottava valokuvista lego-tekniikasta:

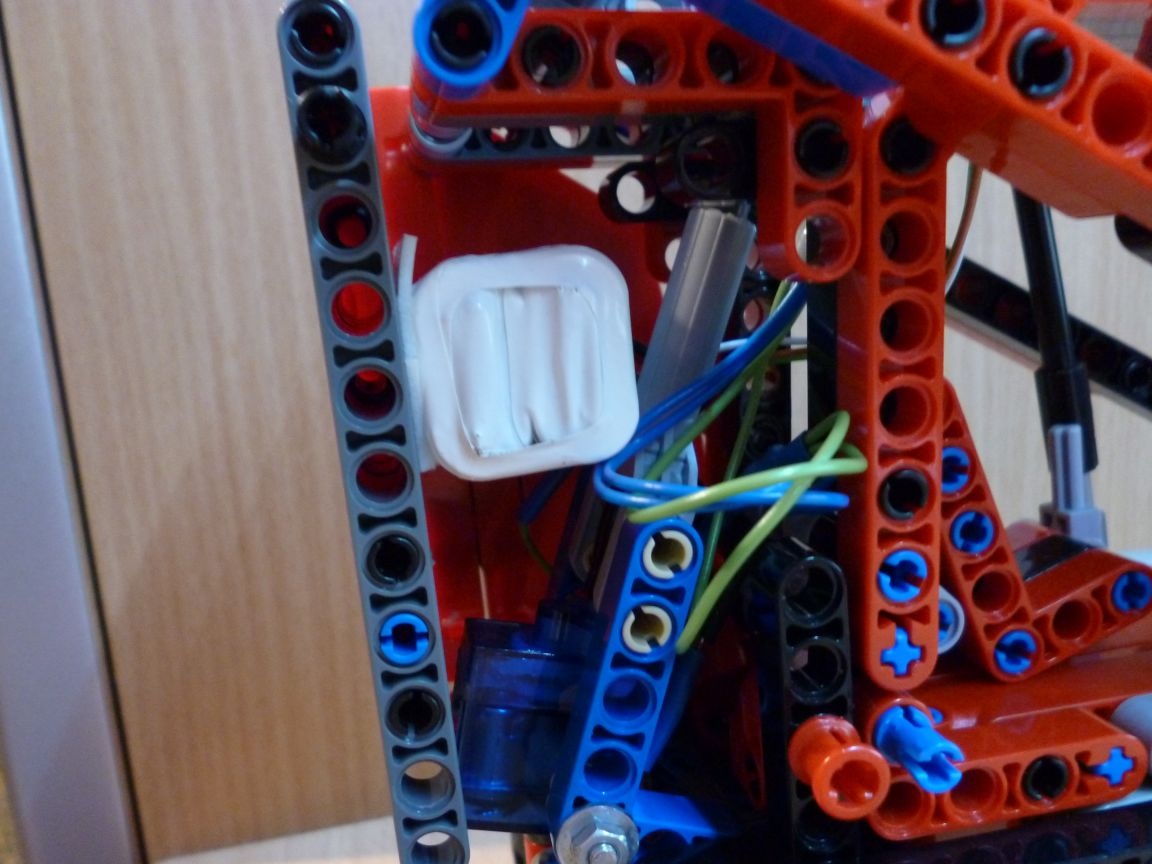
Vaihe 5 on sähköasentaja.
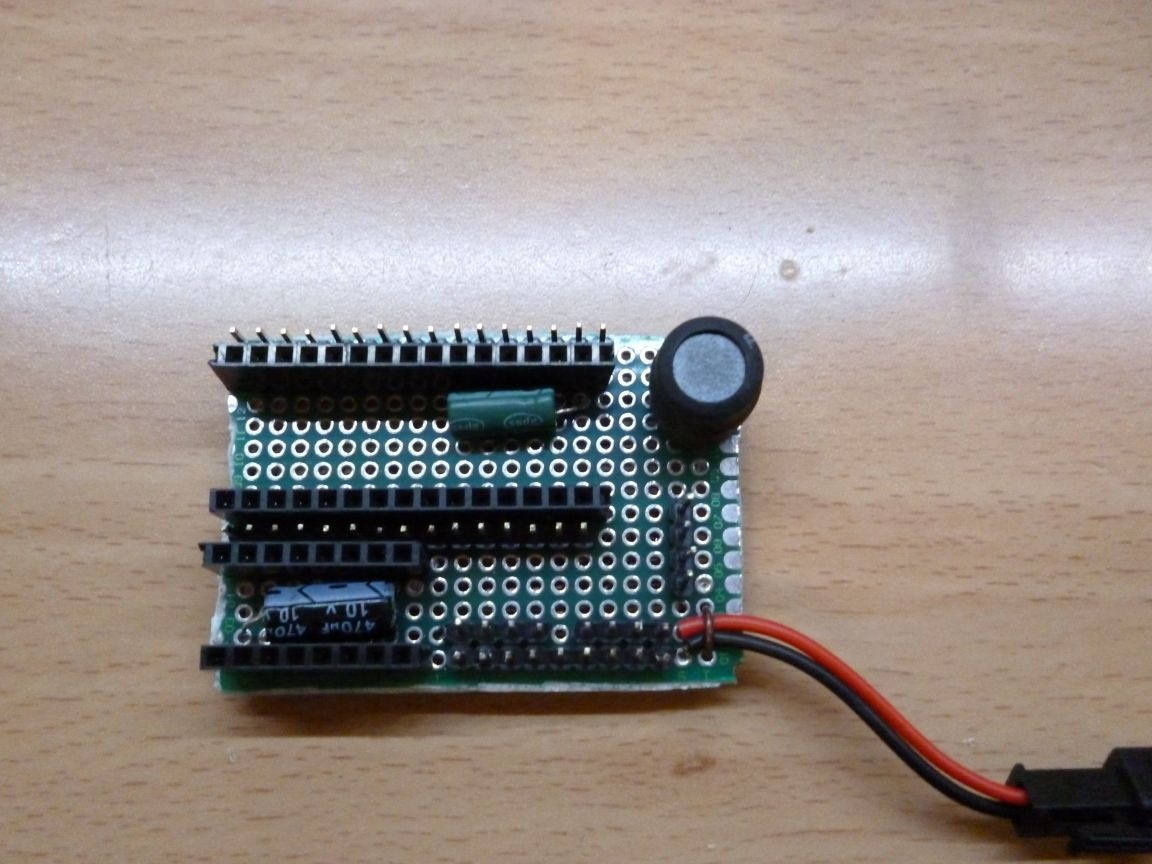
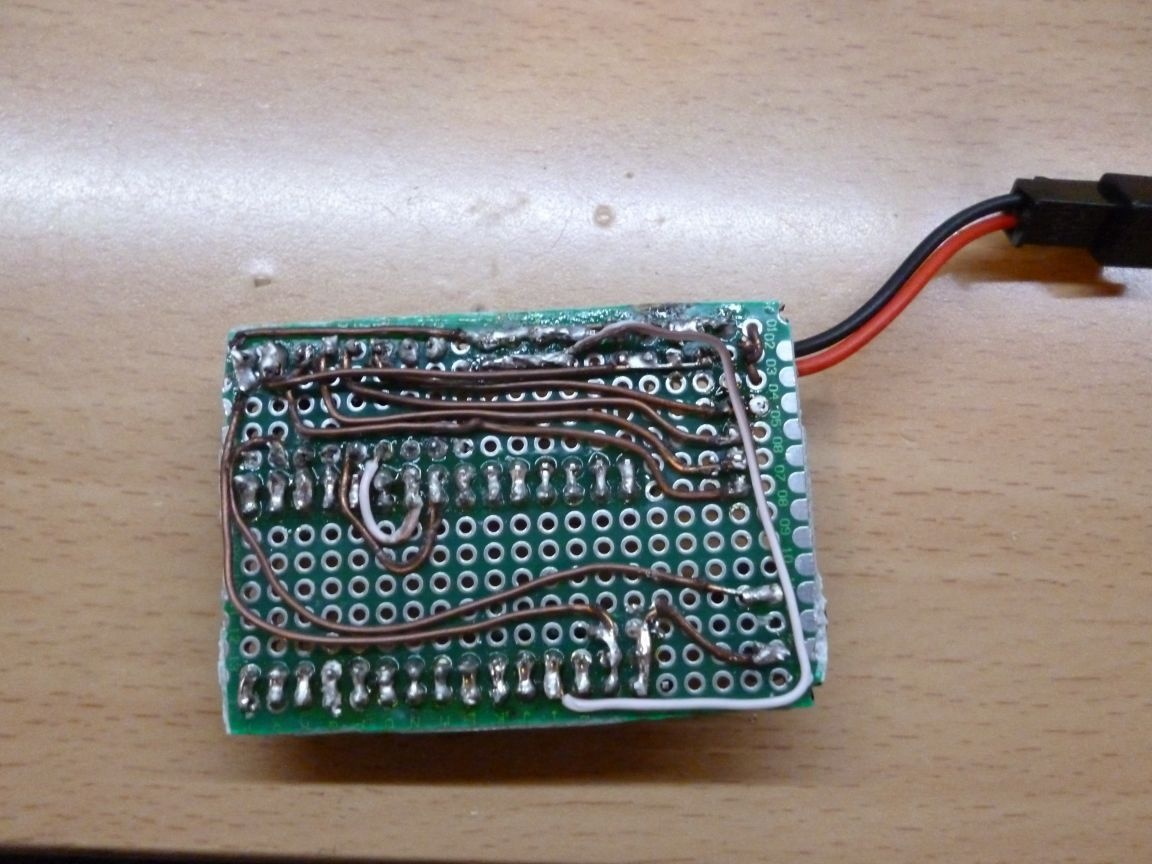
Täällä sinun on otettava juotin. Mukavuuden vuoksi sinun on juotettava kaikki piirilevyltä seuraava kaavio:
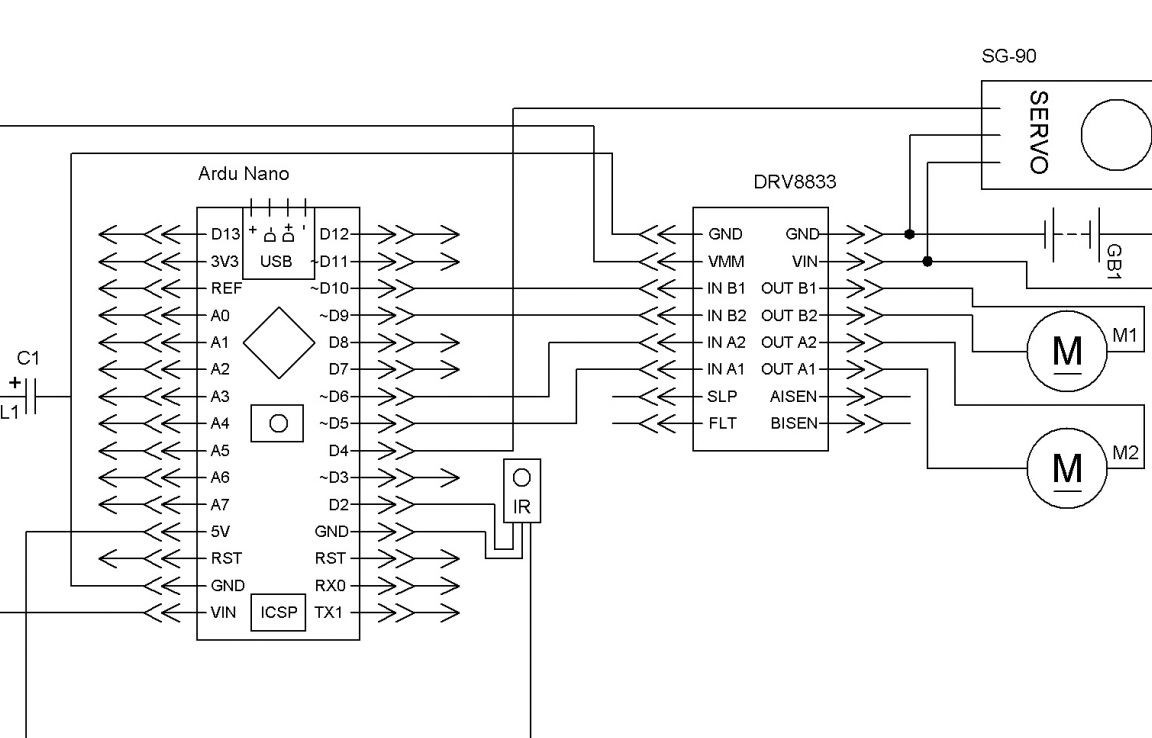
Mielestäni on syytä selittää vähän: voidaan käyttää mitä tahansa pienitehoista kondensaattoria, löytyy myös kaikenlaista induktoria, tämä on välttämätöntä mikrokontrollerin jännitteen vakauttamiseksi. Vastukset on valittava käytetyille LEDille. Otin IR-vastaanottimen vanhasta lelusta, mutta voit ostaa sen radiokaupasta. Jos esiintyy voimakkaita häiriöitä, lisää kondensaattori infrapunavastaanottimen virtapiiriin.
Sain tämän:
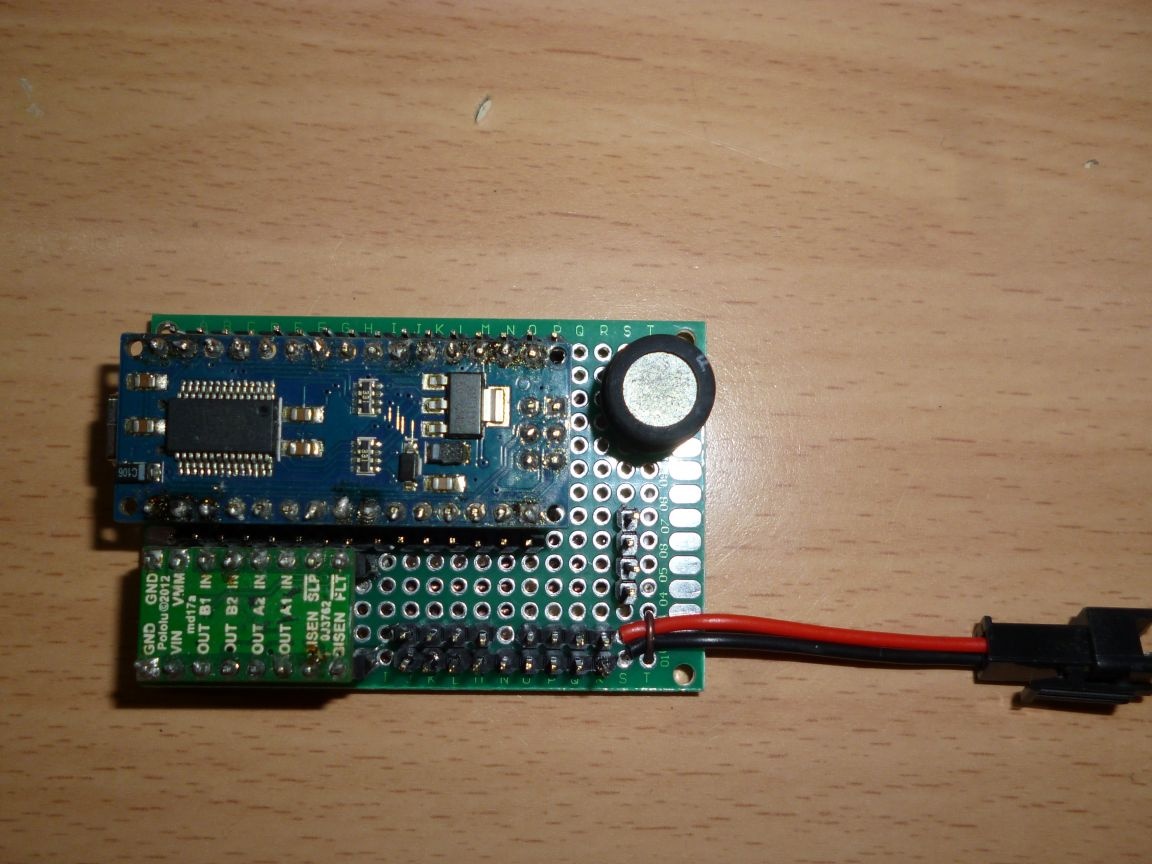
Asennamme Arduino Nanon ja DRV 8833: n paikoilleen:
Ja nyt laitamme sen alustalle (poistimme pyörät mukavuuden vuoksi):
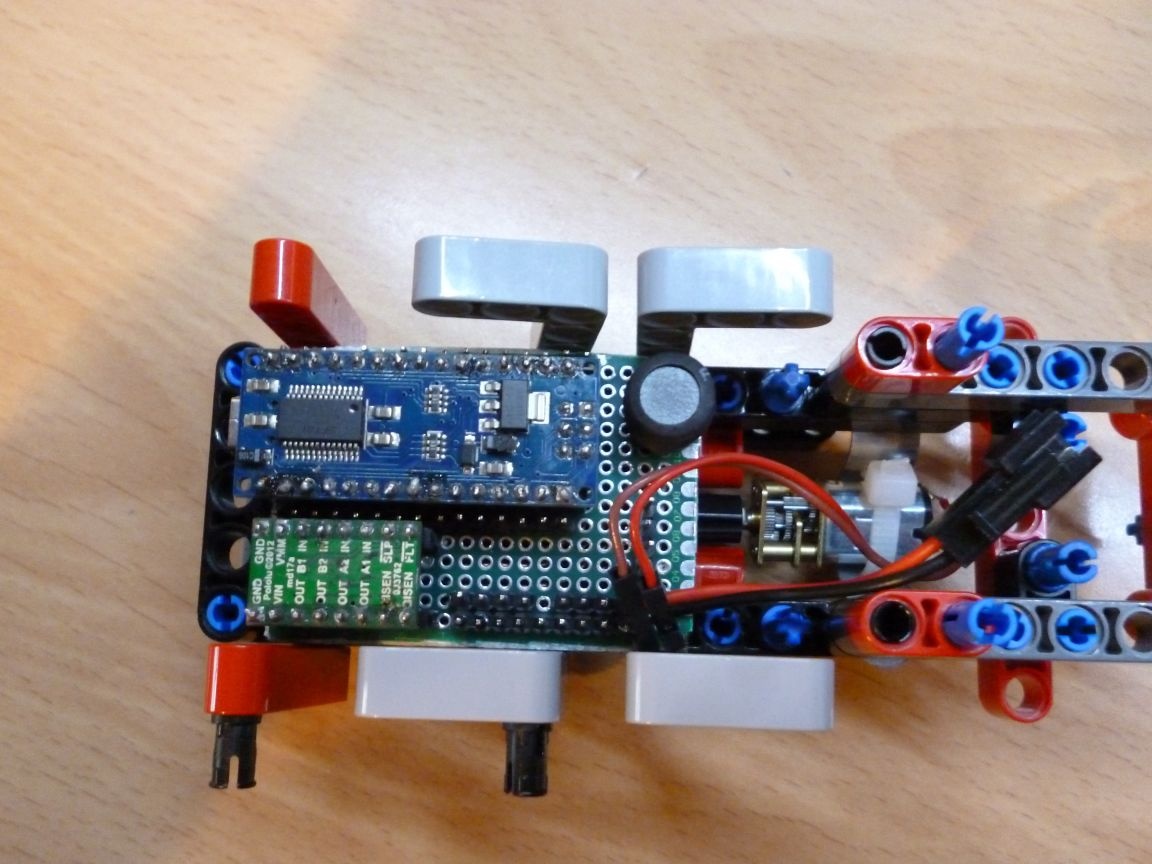
Voimanlähteenä käytin 4 Ni-Mn 1.2v 1000mA -paristoa, jotka on kytketty sarjaan ja kääritty sähköteipillä. Liimoin ne kaksipuoliseen teippiin ohjaamon takaosan alla.
Vaihe 6 ohjaamon asennus.
Yhdistämme infrapunavastaanottimen, moottorit ja diodit kaavion mukaisesti, laitamme ohjaamon rungon päälle, kiinnitämme kauhan (mikä tahansa kauha voidaan tehdä):

Vaihe 7 laiteohjelmisto.
Ohjelmoin Arduino IDE: ssä. Ensin sinun on täytettävä laiteohjelmistoni ja tarkastettava terminaalin kautta kaukosäätimen koodeja, joita aiot käyttää. Voit ottaa minkä tahansa infrapunakaukosäätimen, esimerkiksi televisiosta tai DVD-soittimesta. Napsauttamalla painiketta terminaalissa näemme painetun painikkeen koodin, kirjoita se muistiin paperille. Teemme tämän kaikilla painikkeilla, joilla haluamme ohjelmoida laturin toiminnot. Muokkaa seuraavaksi luonnosta. Kirjoita muistiin tarvittavat toimenpiteet tallennetut koodit ja vilkkuu uudelleen.
lisäys
Latausvideo: