Tänään haluan kertoa seuraavasta homebrew oksa. Se perustuu Legoon ja Työläs. Ohjaamiseksi käytämme kauko-ohjainta 433 MHz: n lähettimen kanssa. Tällä kertaa halusin tehdä kilpa auto. Aloitetaan:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz radioliikennemoduuli
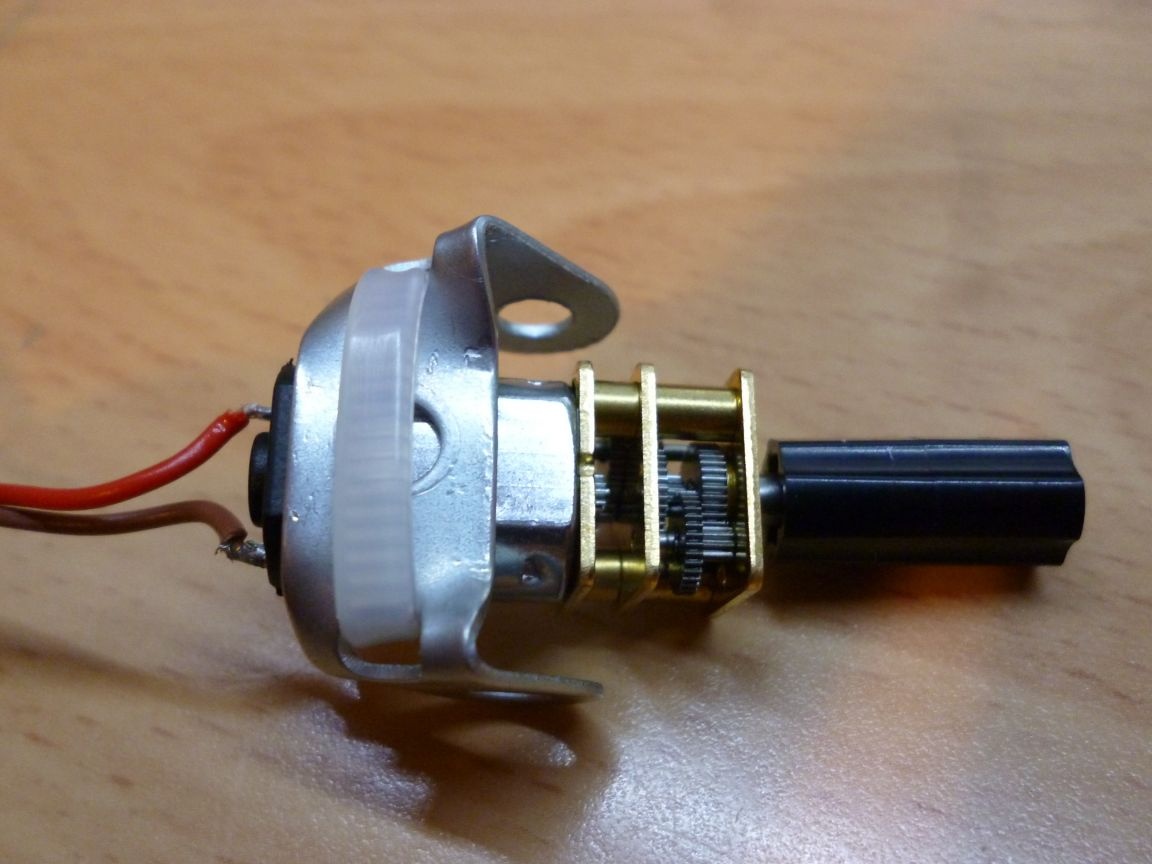
- Moottorin vähennysventtiili 200 rpm, akselin halkaisija 3 mm
- 2 LEDiä
- 2 vastuksia 150 ohmia
- Kondensaattori 10v 1000uF
- 2 yhden rivin kampaa PLS-40
- 2 PBS-20-liitintä
- Induktori 68mkGn
- 6 NI-Mn 1.2v 1000mA -paristoa
- Liitin isä-äiti kahden navan johdolla
- Homutik
- Eriväriset johdot
- juote
- Rosin
- juotosrauta
- Pultit 3x40 ja mutterit ja aluslevyt
- Pultit 3x20
Vaihe 1 koota kotelo.
Koneemme on koottava toisen vaihtoehdon Lego-ohjeiden 42022 mukaisesti jonkin verran parannuksin. Suoritamme kaikki toiminnot sivuilta 3 - 6. Emme tarvitse vaihdemekanismia. Lego-moottoria ei myöskään tarvitse koota. Tarvitset kuitenkin sivuilla 14-19 kerättyjä moottorin kiinnikkeitä, paitsi vaihde- ja akselit. Seuraavaksi keräämme kaiken sivuilta 20-74 paitsi vipu sivulla 25.
Vaihe 2 mekanisoi vartalo.
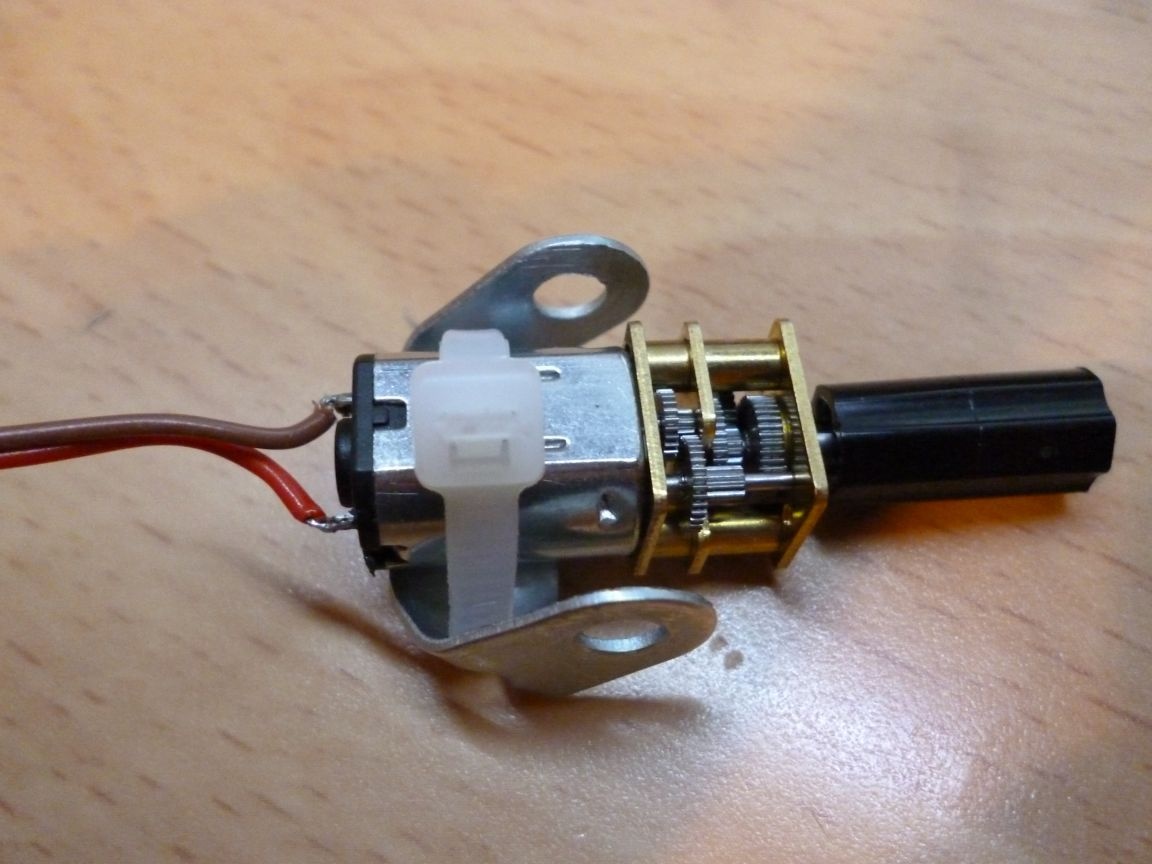
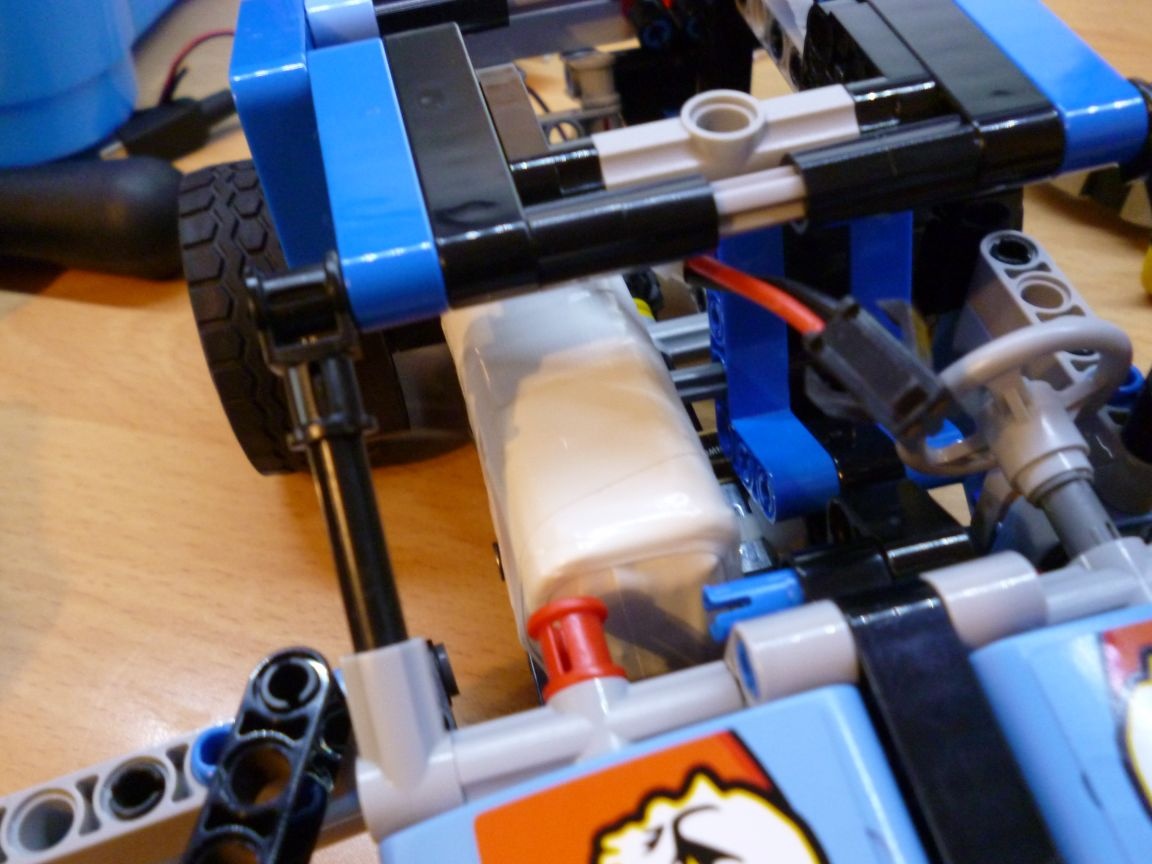
Käynnistä meidän malli tulee olemaan vaihdemoottori, jonka nopeus on 200 rpm. Voidaan käyttää eri vaihdesuhteella. Mutta mielestäni tämä on paras vaihtoehto. Nopeudella 100 rpm - liian hitaasti, 300 rpm - ei ole tarpeeksi virtaa ja moottori on erittäin kuuma. Vaihdemoottorin akselilla sinun on asetettava “Legovskiy” -kytkentäholkki päälle ja kiinnitettävä se kääntymistä vastaan leikkaamalla tulitikkua. Moottorin kiinnittämiseksi malliin on tarpeen taivuttaa osa metallirakentajasta kirjaimella “P” ja kiinnittää vaihdemoottori levyyn puristimella. Tuloksen tulisi olla seuraava:
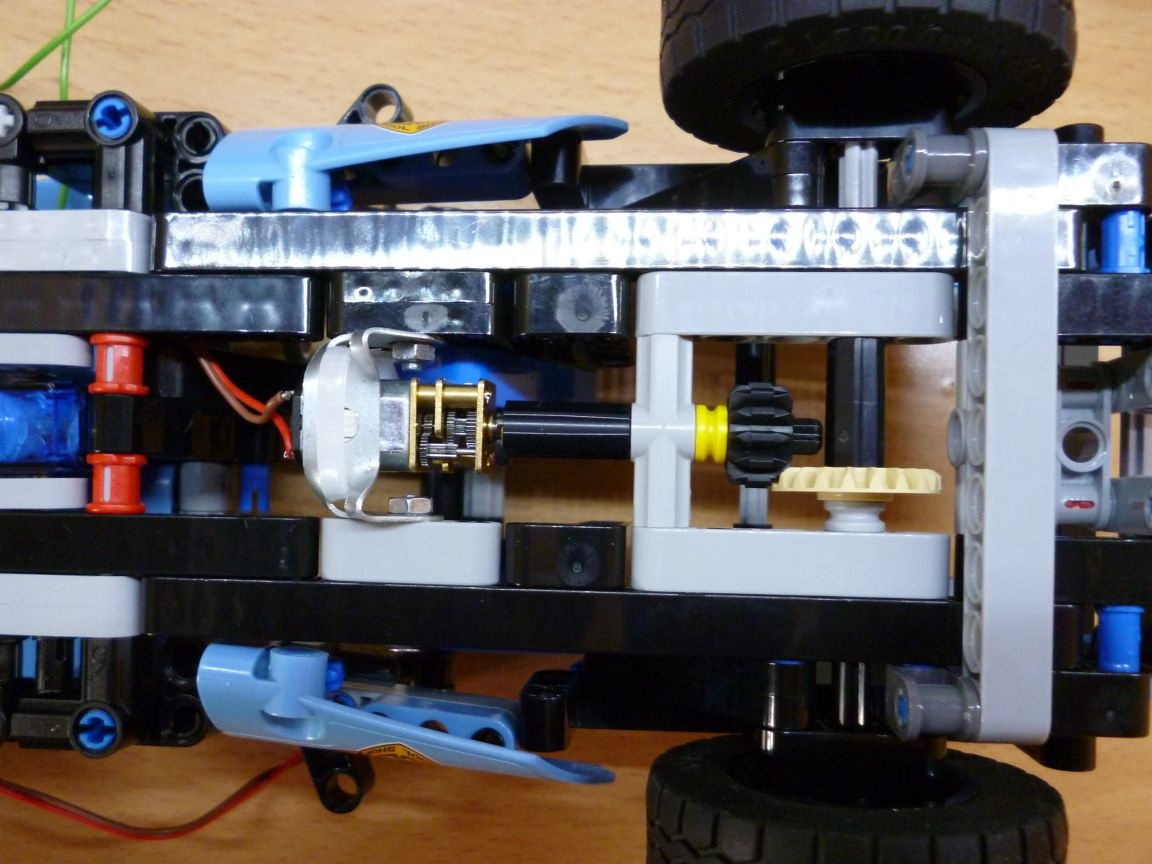
Kiinnitämme moottorin malliin 3x20-ruuvien avulla. Älä kiristä liikaa! Muuten voit vahingoittaa Lego-rakennusosia. Mallissa se näyttää tältä:
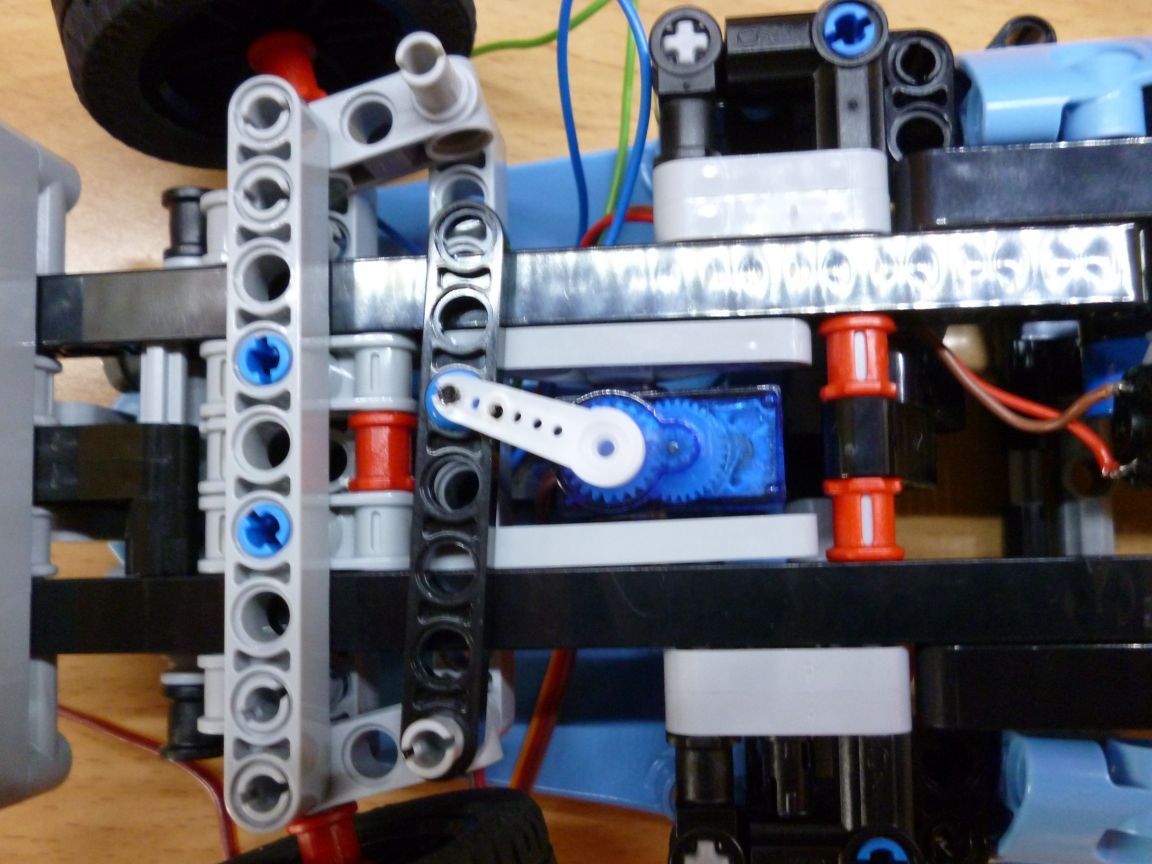
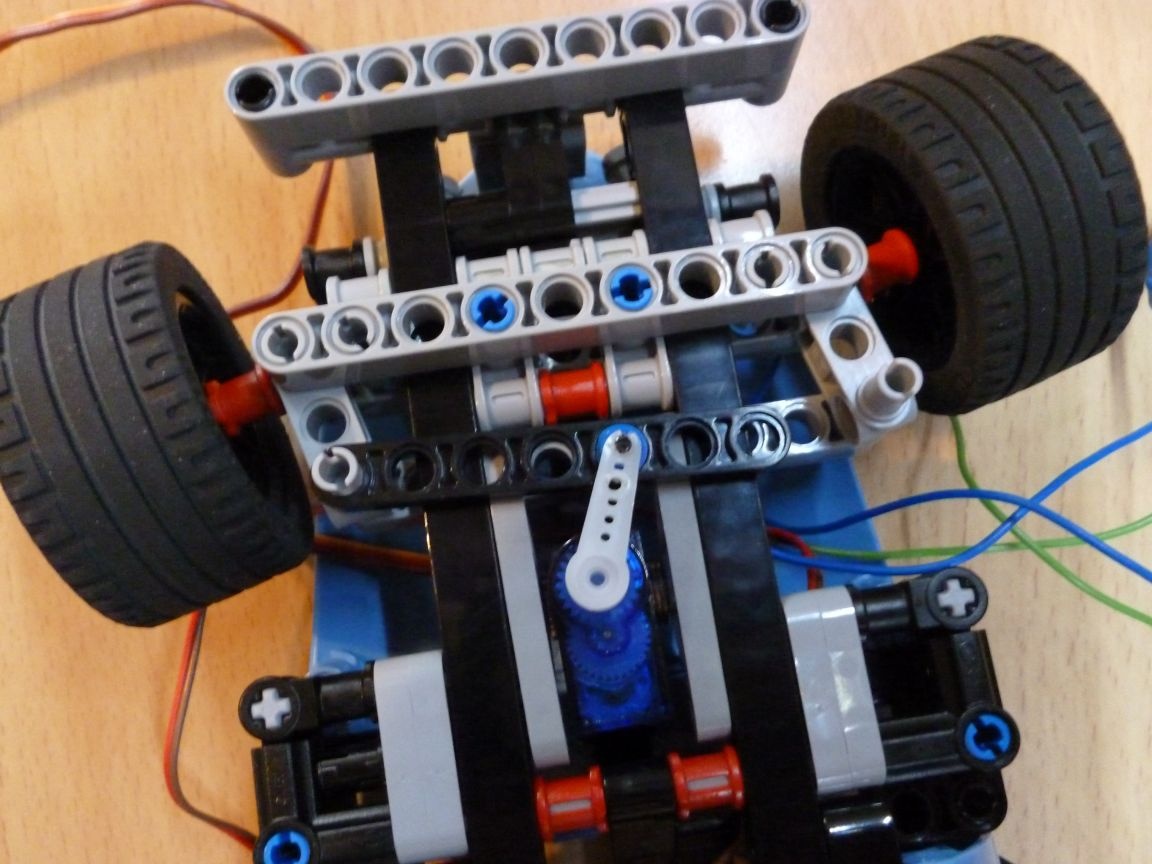
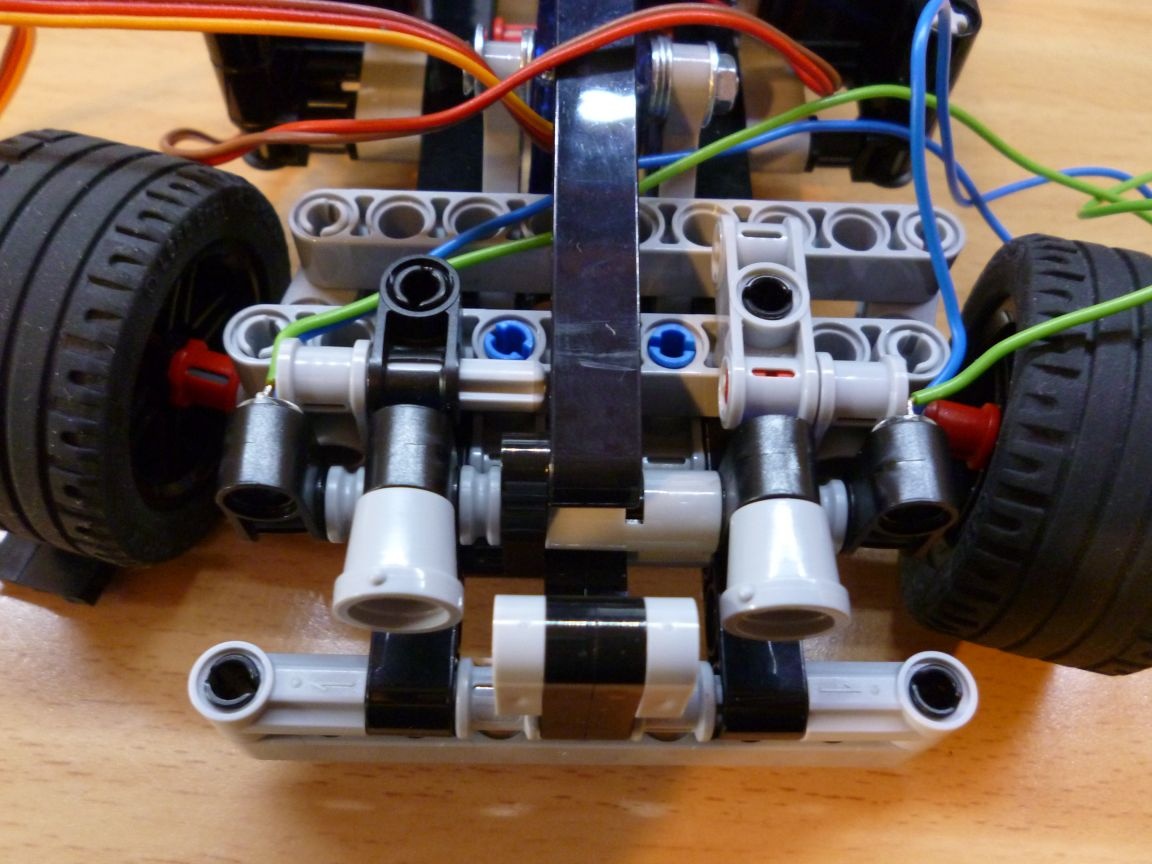
Ota käännös ottamalla hiukan muunnettu servo SG-90. Kotelo on porattava huolellisesti, jotta se ei kosketa sisäosia, läpimitaltaan reikää, jonka halkaisija on 3,2 mm, tai yksinkertaisesti leikata toimistoterällä.

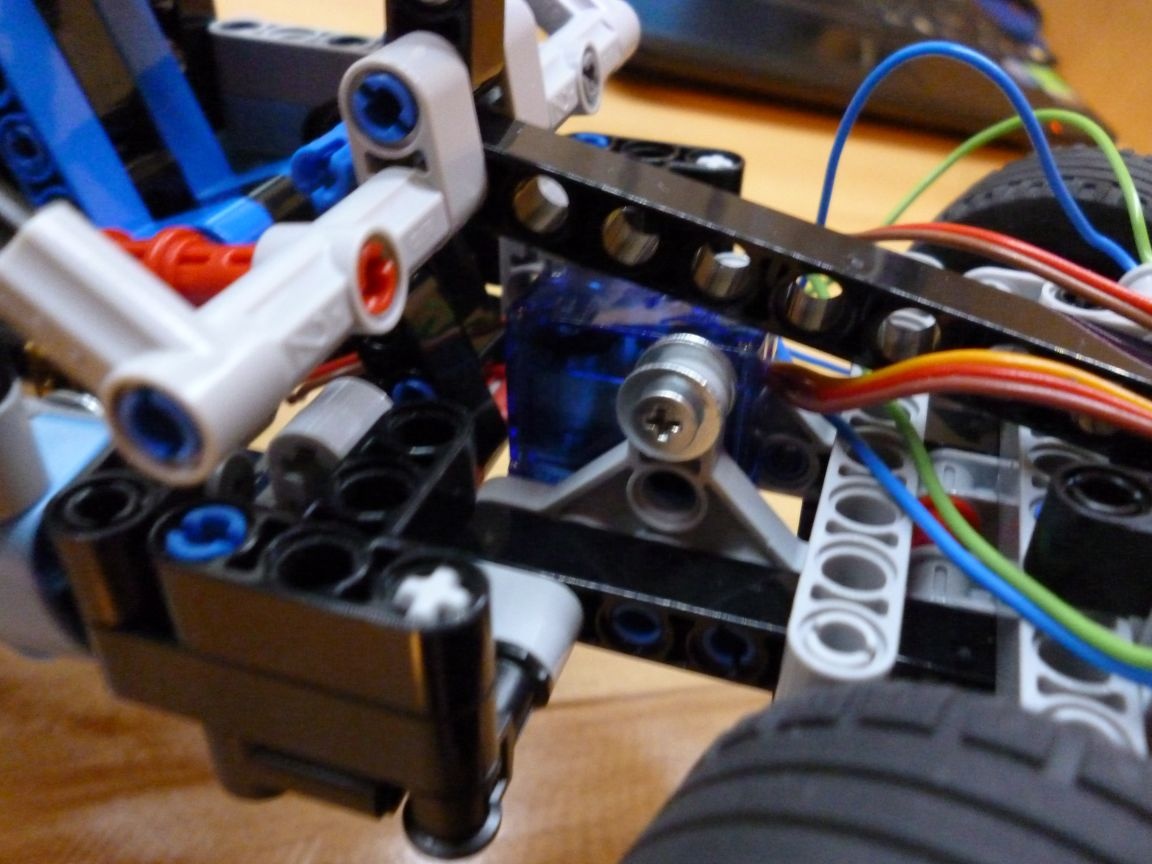
Asetamme pultin tehtyyn reikään ja laitamme reunoille kolmionmuotoiset levyt ja kiinnitämme muttereilla. Laitamme vivun servoakselille ja kiinnitämme osan Lego-vipuun. Kirjoituskoneella se näyttää tältä:
Vaihe 3 on sähköasentaja.
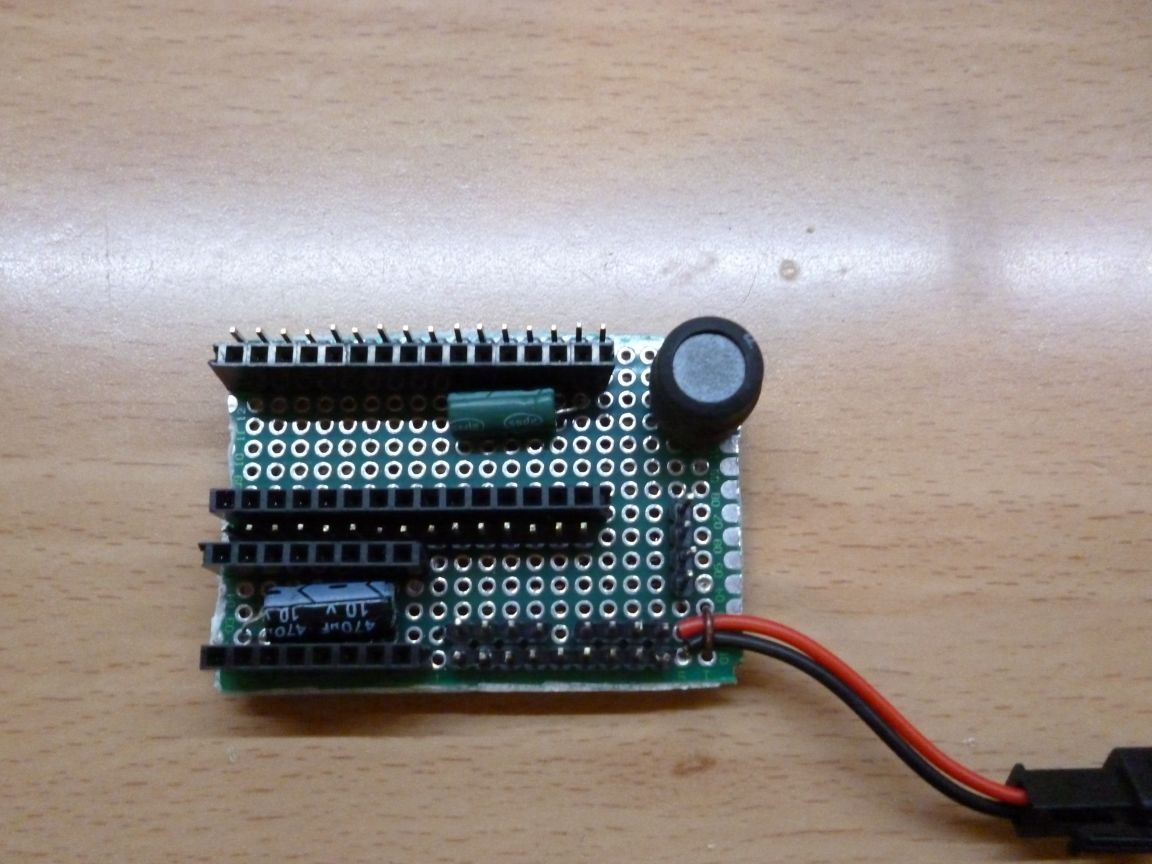
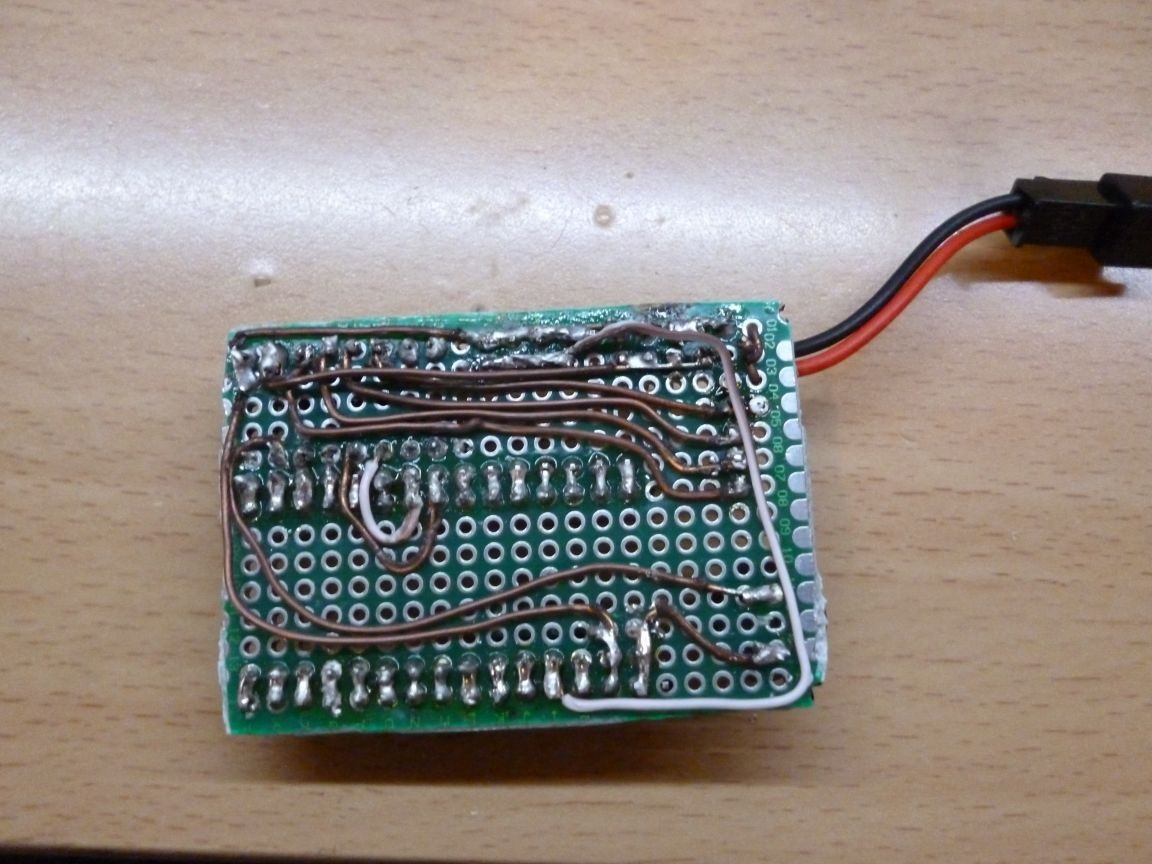
Juotosrauta kädessä ja mene. Kaikki sähköt voidaan koota yksinkertaisesti kytkemällä kiinnitysjohdot. Mutta tämä on hankalaa, koska se vaatii paljon tilaa. Lisäksi on erittäin todennäköistä, että huono laatu koskettaa. Siksi on parempi juottaa kaikki piirilevylle seuraava kaavio:
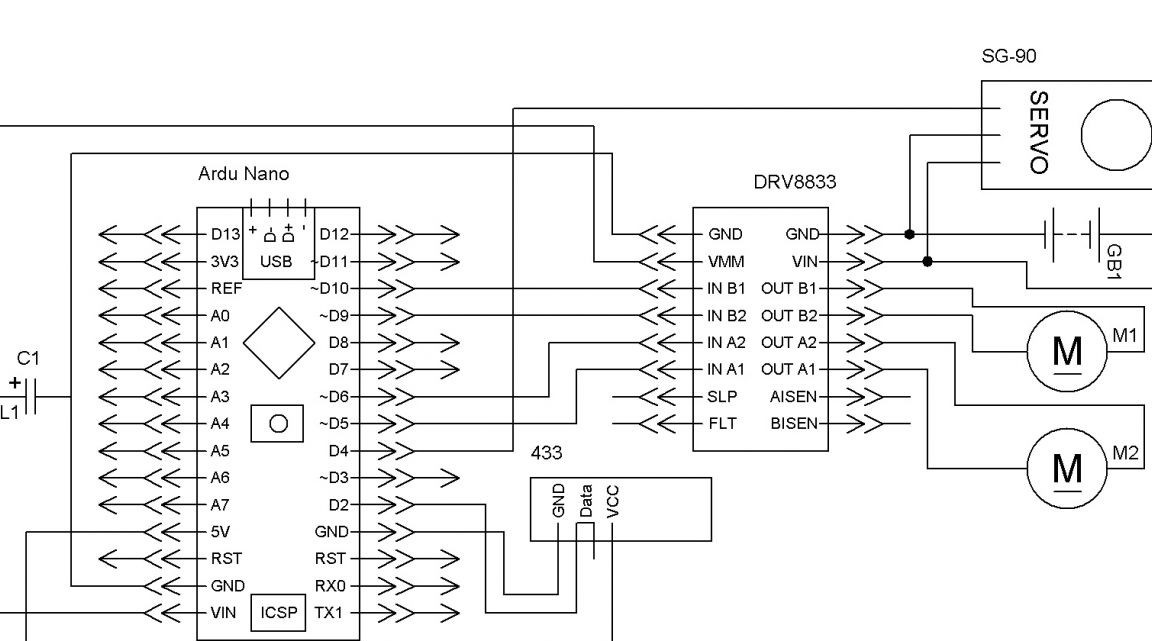
Annan vähän selkeyttä: voit ottaa minkä tahansa pienitehoisen kondensaattorin, voit myös löytää kaikenlaisen induktorin, tämä on tarpeen mikrokontrollerin jännitteen vakauttamiseksi. Antenni on juotettava vastaanottimeen. Sain seuraavat:
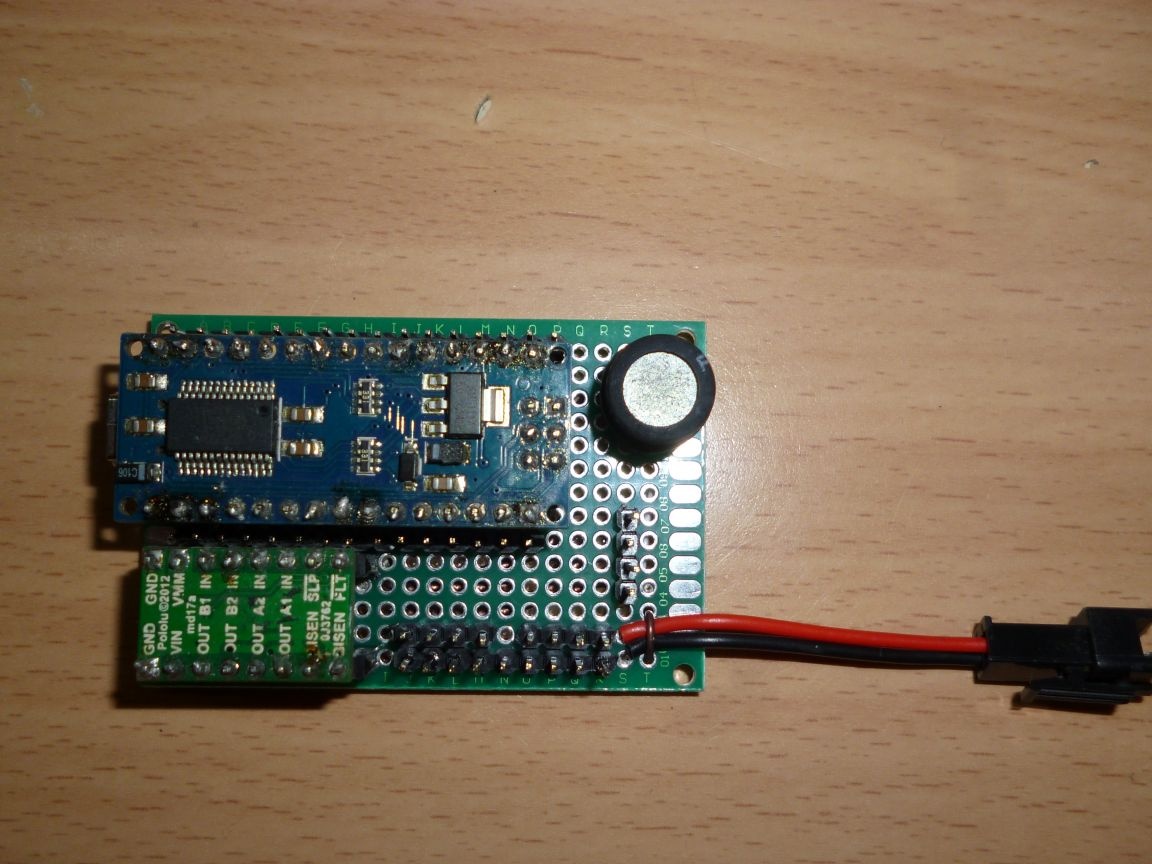
Laitoimme Arduino Nanon ja DRV 8833: n paikoilleen:
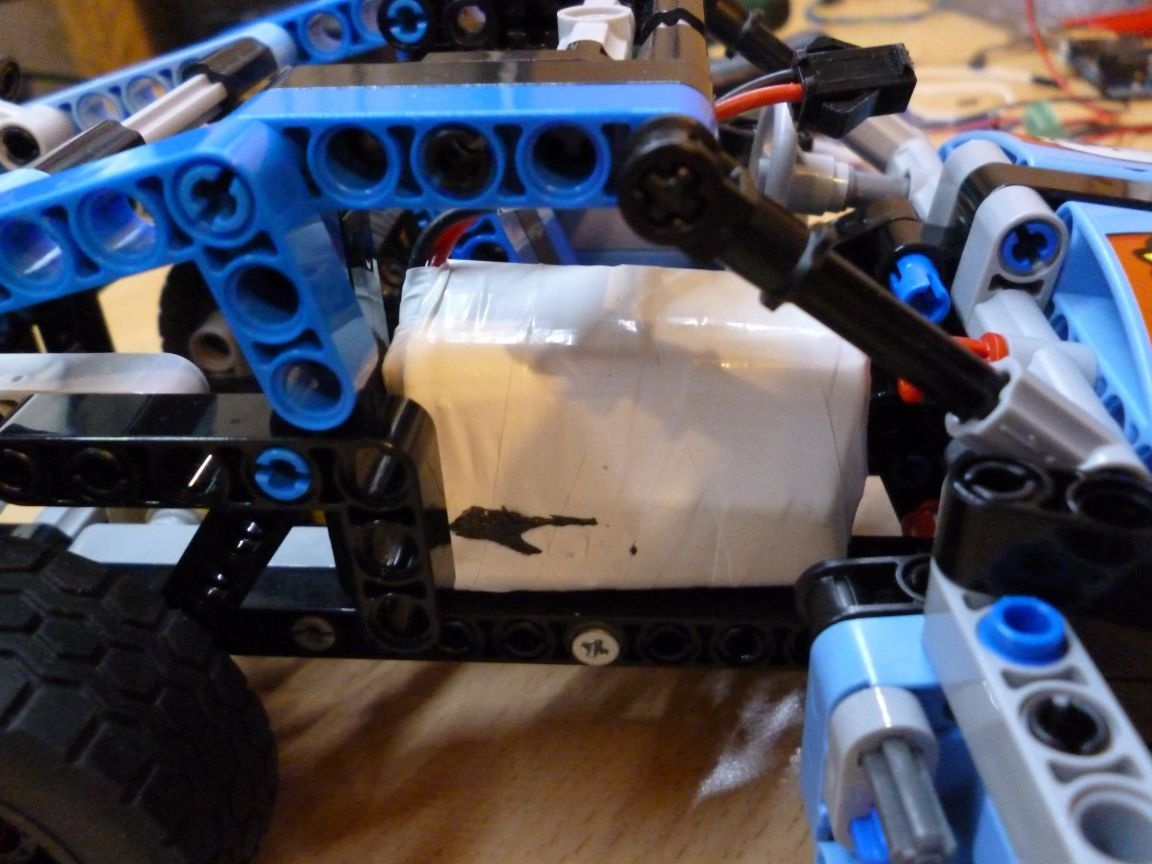
Voimaan käytetään 6 Ni-Mn 1.2v 1000mA -paristoa, juotettu sarjaan ja kääritty sähköteipillä. Liimaa ne kaksipuoliseen teippiin kulkevaan matkustajan istuimeen.

Yhdistämme kaiken kaavion mukaisesti ja asennamme koneen takaosaan. Voit myös lisätä pari merkkivaloja. Laita ne ajovaloihin ja kytke nastaan 14 (A2).
Vaihe 4 laiteohjelmisto.
Laiteohjelmiston kirjoittamiseen käytin Arduino IDE: tä. Nykyinen versio kirjoittamishetkellä on 1.8.1. Tietoliikenneprotokolla on kätevä toteuttaa käyttämällä 433 MHz: n moduulia rc-switch-2.52-kirjaston avulla. Sinun on ladattava se ja lisättävä se Arduino IDE: n kirjastojen kansioon.
Yhdistämme Arduinon ja salamaamme sen seuraavalla laiteohjelmistolla:
Tarvitsemme mallin suorituskyvyn testaamiseksi toisen Arduino-levyn. Toiseen korttiin on tarpeen kytkeä 433 MHz: n radiolähetin. Lähetin on kytketty seuraavasti:
VCC (lähetin) 5+ (Arduino),
GND - GND,
TIEDOT D10.
Kirjoita muokattu SendDemo-luonnos sinne. Se on asennetun kirjaston esimerkeissä, ja se toimii komentojen lähettämisessä. Ennen kuin vilkutat luonnosta, sinun on muutettava sitä hiukan eli muutettava lähetettyjä komentoja. Kirjoita seuraavat komennot lähetysriville riippuen siitä, mitä sinun on tarkistettava:
“1” - liike eteenpäin (kirjoita komento ilman lainausmerkkejä!)
"2" - liike taaksepäin
”15” - täysi pysäkki
"3" - käännä ohjauspyörä vasemmalle
"4" - käännä ohjauspyörä oikealle
"5" - aseta ohjauspyörä keskelle
"10" - kytke ajovalot päälle
"11" - sammuta ajovalot
Kaukosäätimen tekeminen 433 MHz: n radiolähettimellä on erillisen artikkelin aihe. Aion ehdottomasti kirjoittaa ohjeet tällaisen kaukosäätimen valmistukselle.
Haluan sanoa, että tämä vaihtoehto sopii melkein kaikille Lego-autojen malleille. Riittää, kun yhdistät kaikki mekaniikat ja löytää paikka levylle. Ja jos lisäät fantasiaa, voit mekanisoida minkä tahansa mallin.