

Hyvää päivää Arduinon ystäville! Näin Internetissä melko mielenkiintoisen ja näyttävän robotin (tai laitteen, kutsu sitä haluamaasi), joka “pelaa” Stak-peliä, samojen toimintaperiaatteiden avulla voit tehdä robotin, joka voi pelata pelejä, kuten geometrian viiva, piano ja muita, missä vain tarvitset Napauta näytölle tietyllä järjestyksellä. Mitä tein, arvioi alla olevassa tutkimuksessa.
Jos joku on kiinnostunut, tässä on video tämän robotin työstä:
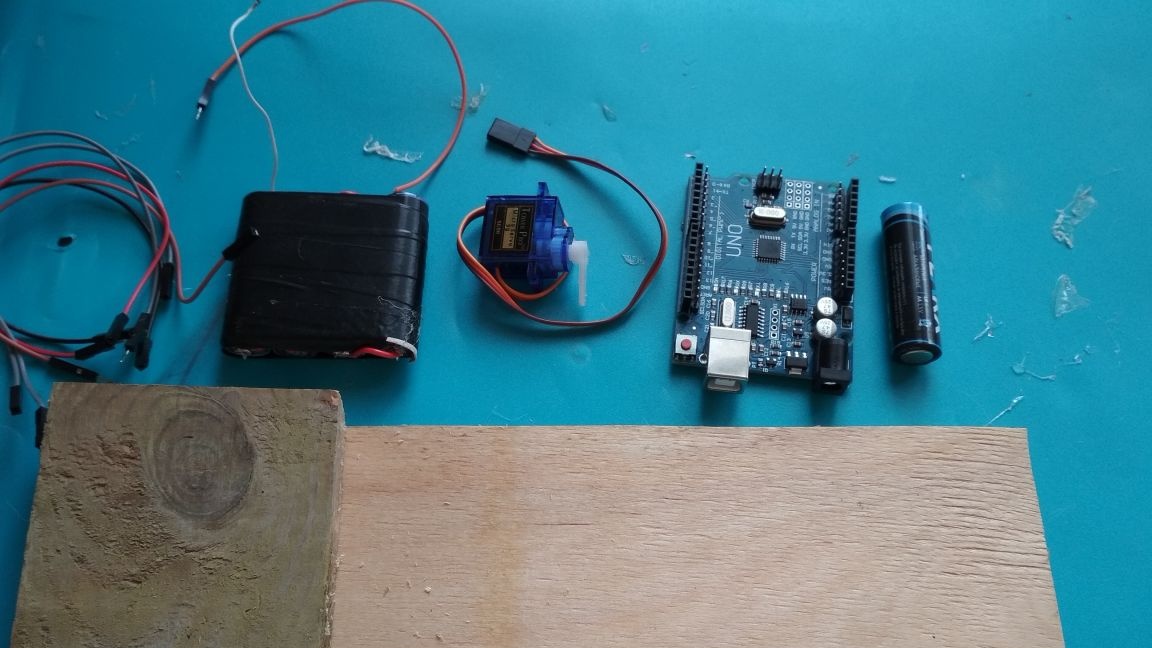
Ja niin tälle "robotille" tarvitsemme:
pukeminen Työläs Uno
-tyyppiset "isä-äiti" tai "isä-isä" -johdot
-servoprivod
- pala vaneria
- noin 1 cm paksu levylevy, tärkeintä on, että se on kaksi kertaa paksumpaa kuin vaneri
jäätelökeppi
-stilus
Folio (jos kynää ei ole)
-paristo (jos kynää ei ole)
- virransyöttö 6–12 voltille (käytän 4 sormeakkua kytkettynä sarjaan)
Tarvitsemme työkaluista:
-Scissors
lämpöliima
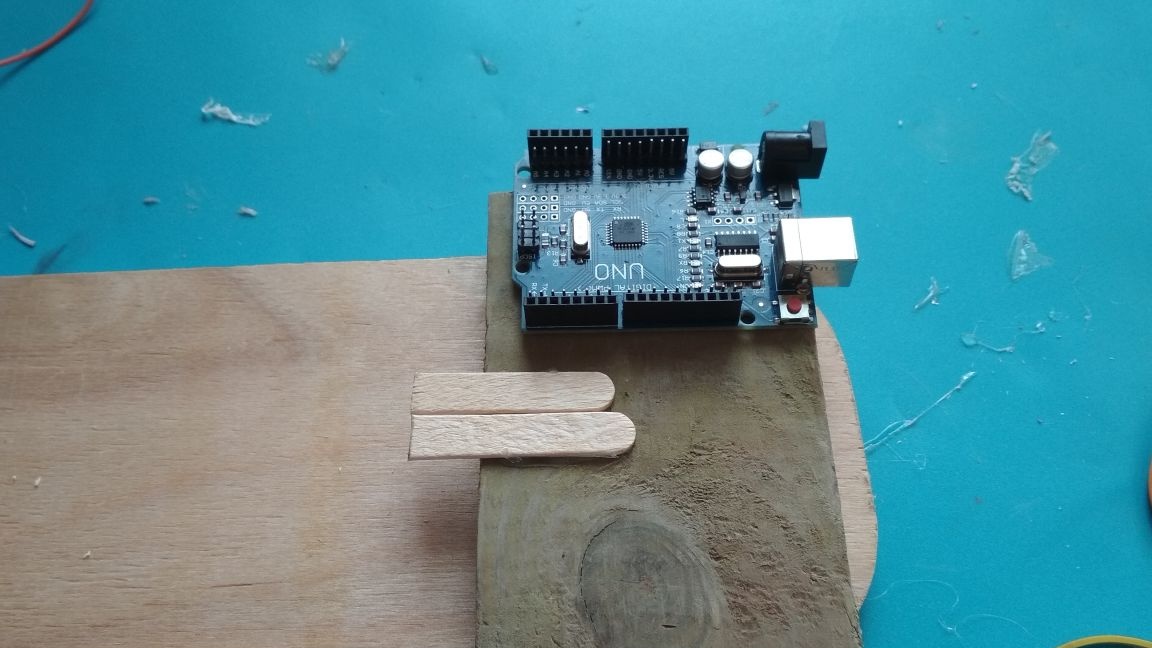
Ja niin ensimmäinen asia on leikata leuka, joka on kaksi kertaa niin suuri kuin puhelin, vaneripalasta, voit suurentaa, ja sinun on leikattava puhelimesi kokoinen pala levyltä (tein hiukan erikokoisia, mutta tämä ei ole lainkaan kriittistä). Sitten liimaamme aihiomme kuvan osoittamalla tavalla:

Ota jäätelötikku ja leikkaa se noin puoleen:

Liimaa ne levyn keskelle, vanerin puolelta, kuten kuvassa:

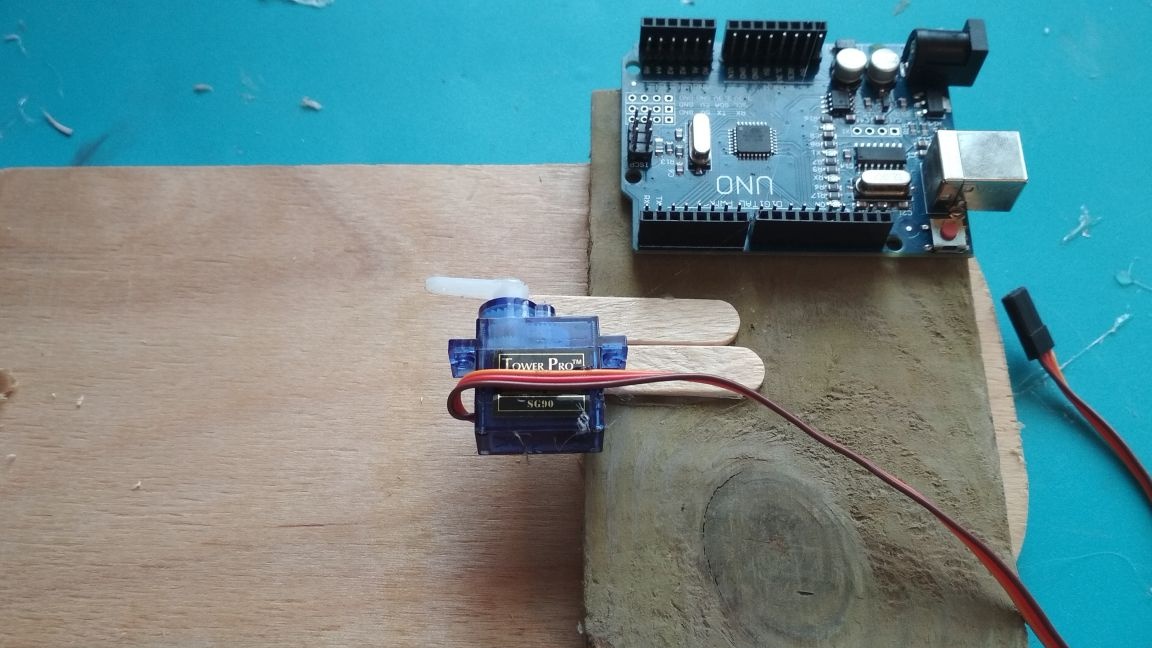
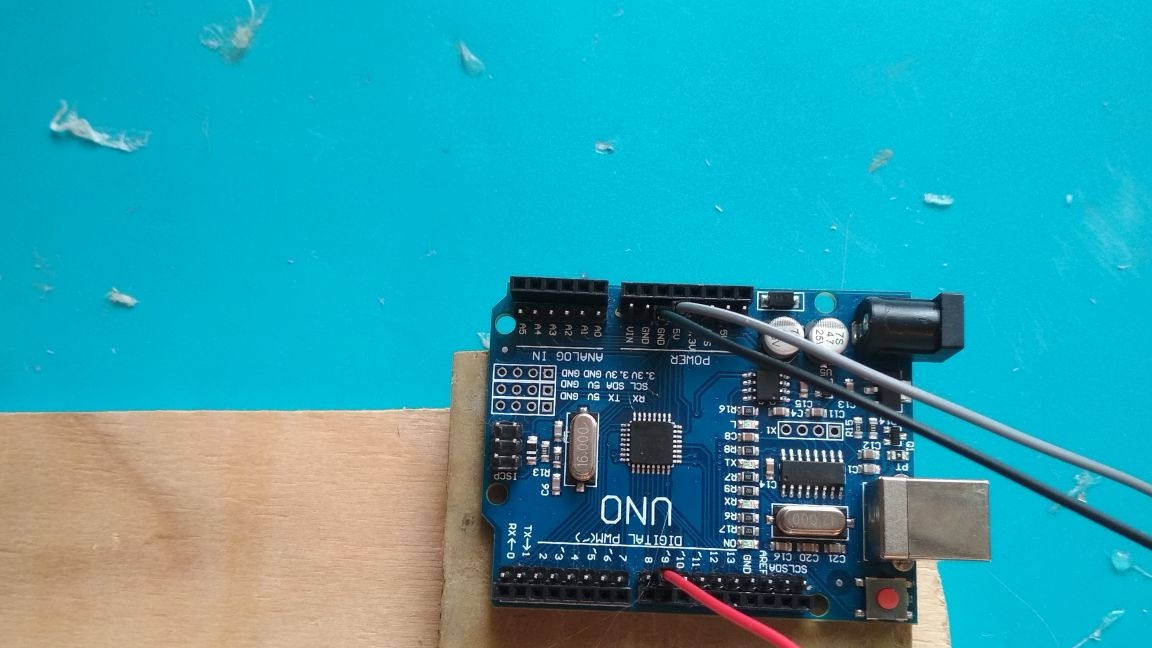
Liimaamme Ardino Uno -levyn levyn reunasta:
Otamme servomoottorin ja liimaa johdot niin, että ne eivät häiritse:
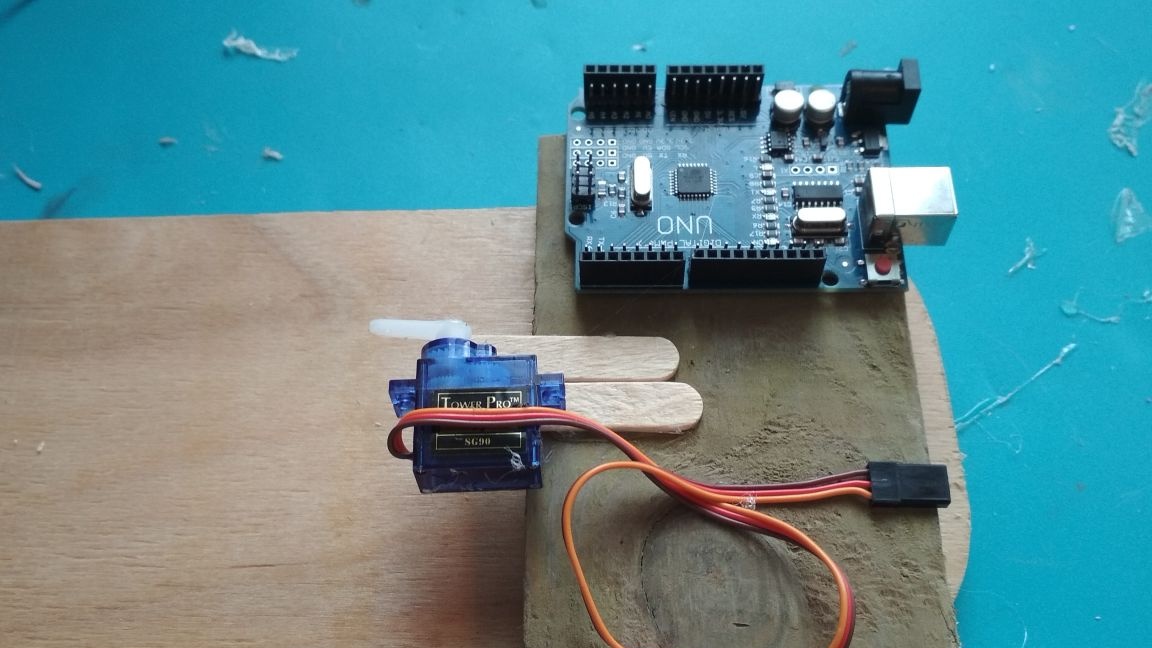
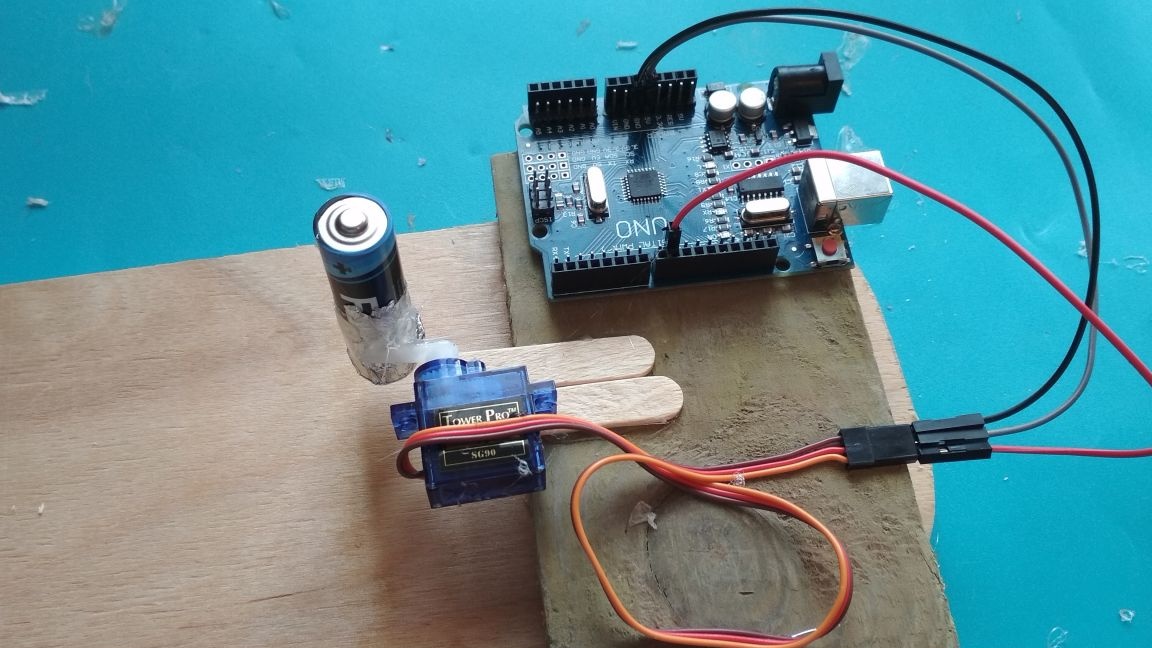
Liimaa servomoottori jäätelötikkujen puoliskojen loppuun:
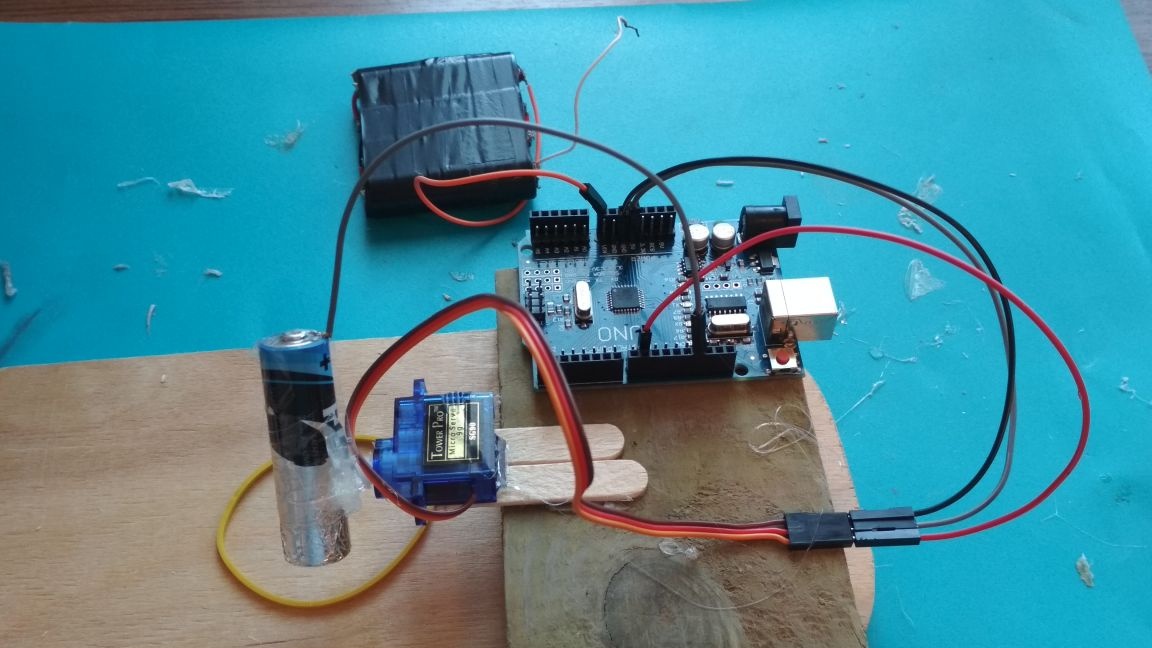
Asetamme johdot ja liimaa servomoottorin lähtö levyn reunaan:
Lisää 3 isä-äiti-johtoa, mieluiten eri väreissä, jotta ei sekoittuisi
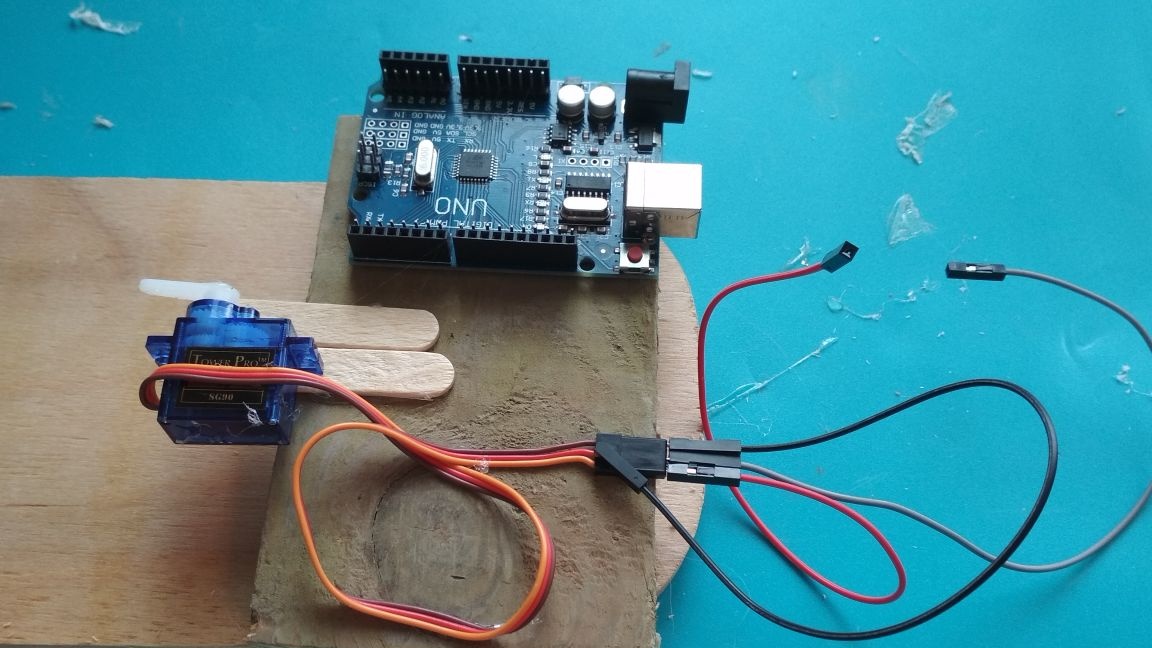
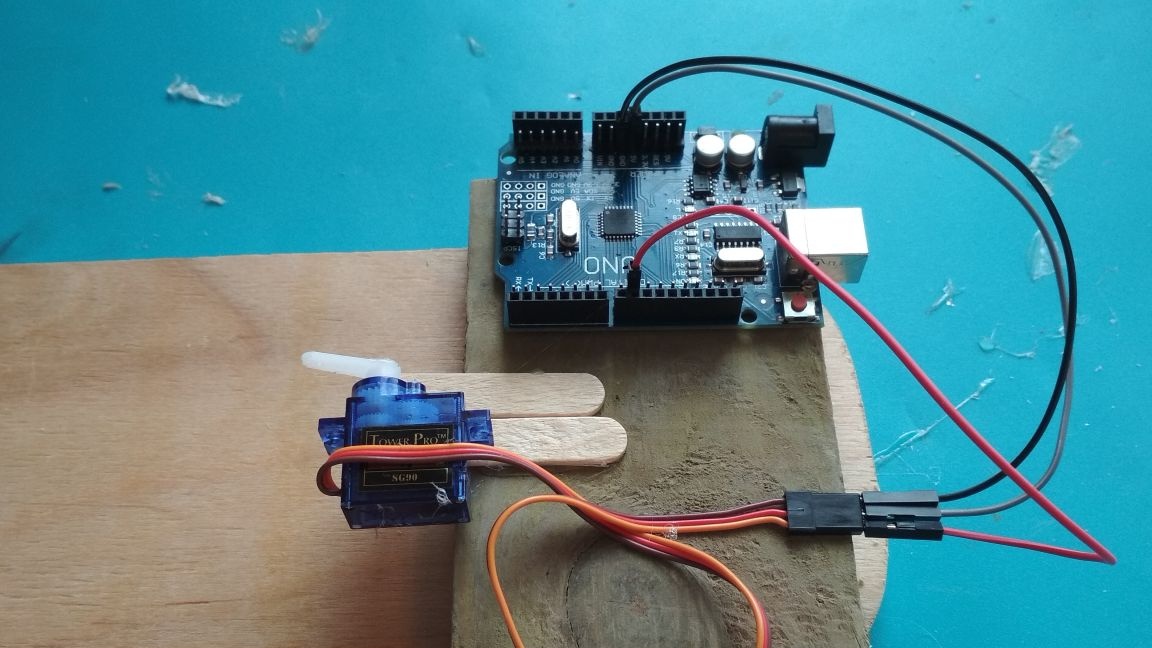
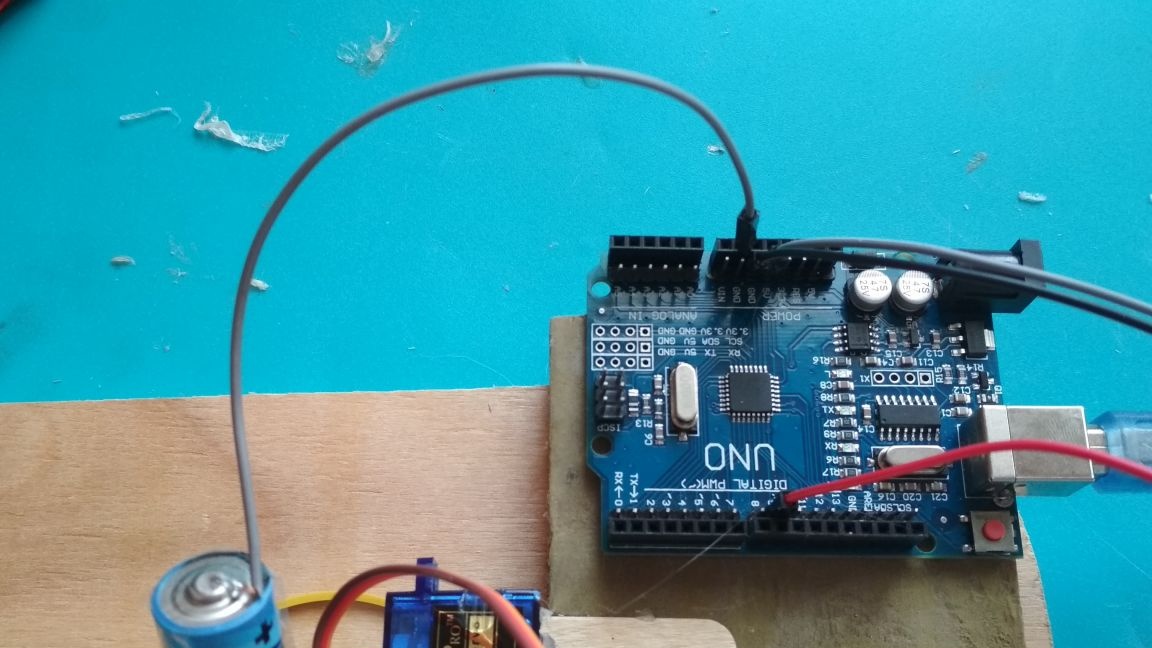
Yhdistämme servoaseman Arduino-korttiin seuraavasti:
ruskea lanka gnd: ksi
-Punainen johdin 5 voltiin
- oranssi johdin 9 "digitaaliseen pin"
Jos sinulla ei ole kynää, kuten minun, älä epätoivoisesti, se on erittäin helppo tehdä.
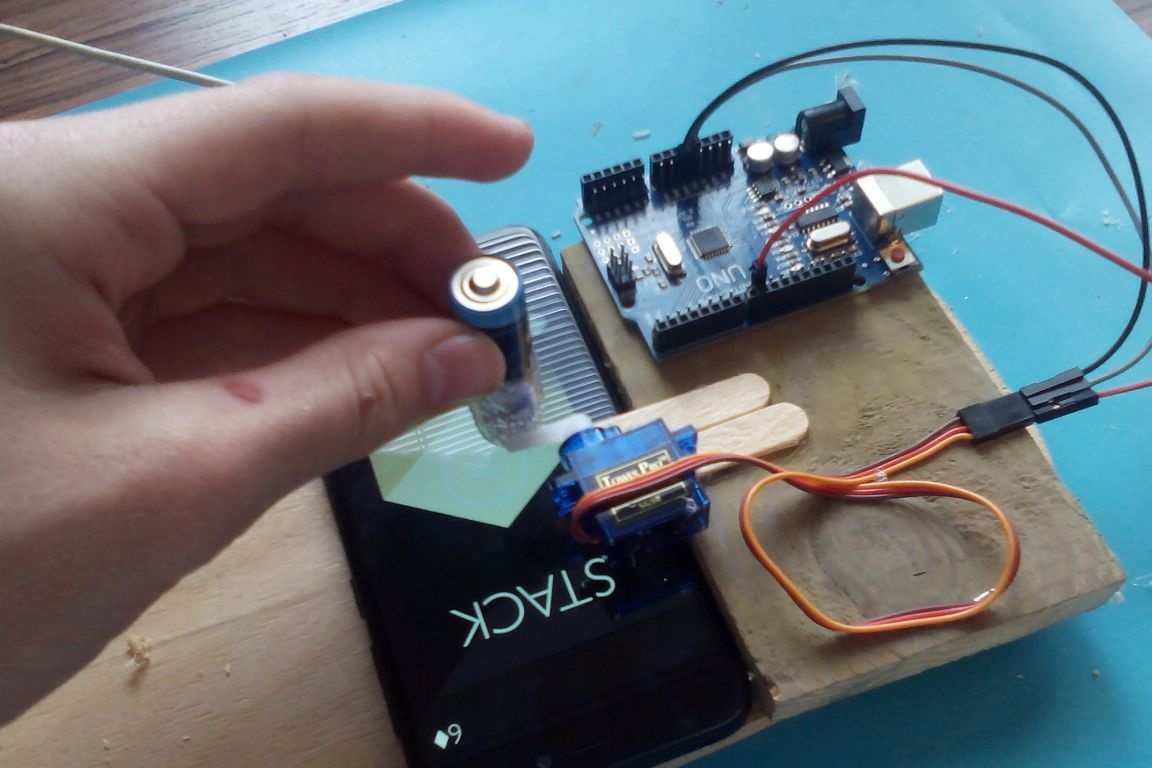
Otamme tavallisen sormityyppisen akun ja miinuspuolen mahdollisimman tiukasti, kääritä se kalvolla ja teippaamme sen sitten hyvin tiukasti:

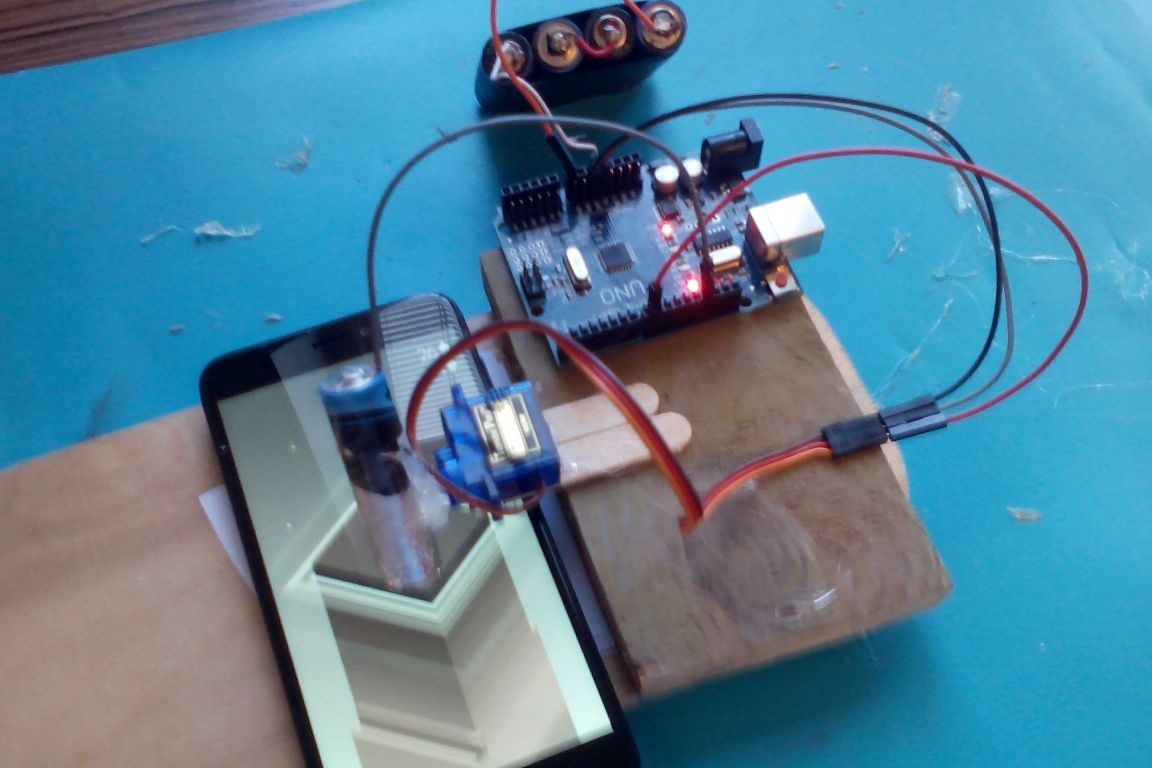
Nyt sinun täytyy laittaa puhelin vanerille servomoottorin alle, kiinnittää akku päälle ja huomata, millä tasolla me kiinnitämme "kynämme". Kun olemme todenneet kaiken, liimaa “kynä” tiukasti servomoottorin vipuun, tiukasti 90 asteen kulmassa (saman kulman tulisi olla, kun asetat kynää puhelimeen, kun mittasimme sitä). Kaiken pitäisi tapahtua kuvan osoittamalla tavalla:

Yhdistämme nyt "robotin" tietokoneeseen Arduino IDE: ssä määritetyn portin kautta, ajaa aiemmin nimeltään Arduino IDE ja kopioi alla oleva luonnoksen ja napsauta sitten "Lataa" -painiketta. Jos kaikki tehdään oikein, luonnos latautuu ilman virheitä ja muutaman sekunnin kuluttua servomoottori aloittaa toimintansa. Jos sinulla on merkittäviä eroja kynän ja servomoottorin kokoissa, tee tämä luonnos itsellesi, se on melko yksinkertaista.
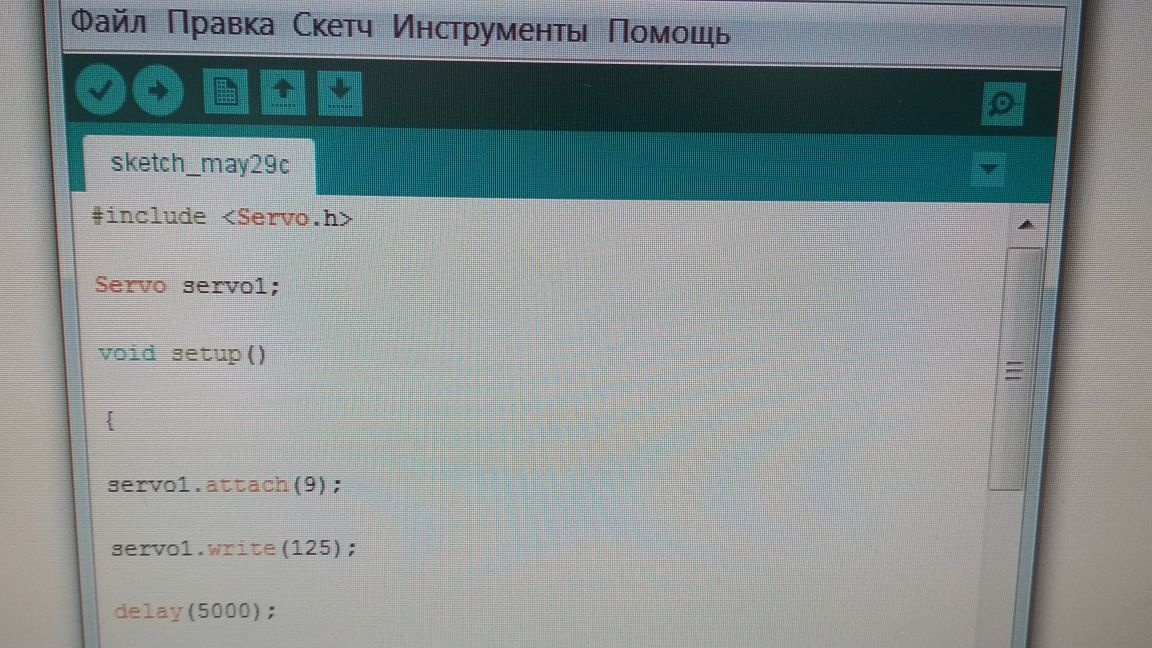
Tässä on luonnos:
#include
Servo servo1;
tyhjä asennus ()
{
servo1.attach (9);
servo1.write (125);
viive (5000);
servo1.write (90);
viive (200);
servo1.write (125);
viive (750);
}
tyhjä silmukka ()
{
servo1.write (90); // 1
viive (200);
servo1.write (125);
viive (600);
}Kierrämme teipillä tai sähköteipillä “äiti-äiti” -tyyppisen johtimen stripattua puolta, jossa on katkaistu “äiti” -lähtö, kynän plus-puolelle ja lähetämme tämän johtimen Gndille Arduinoon:
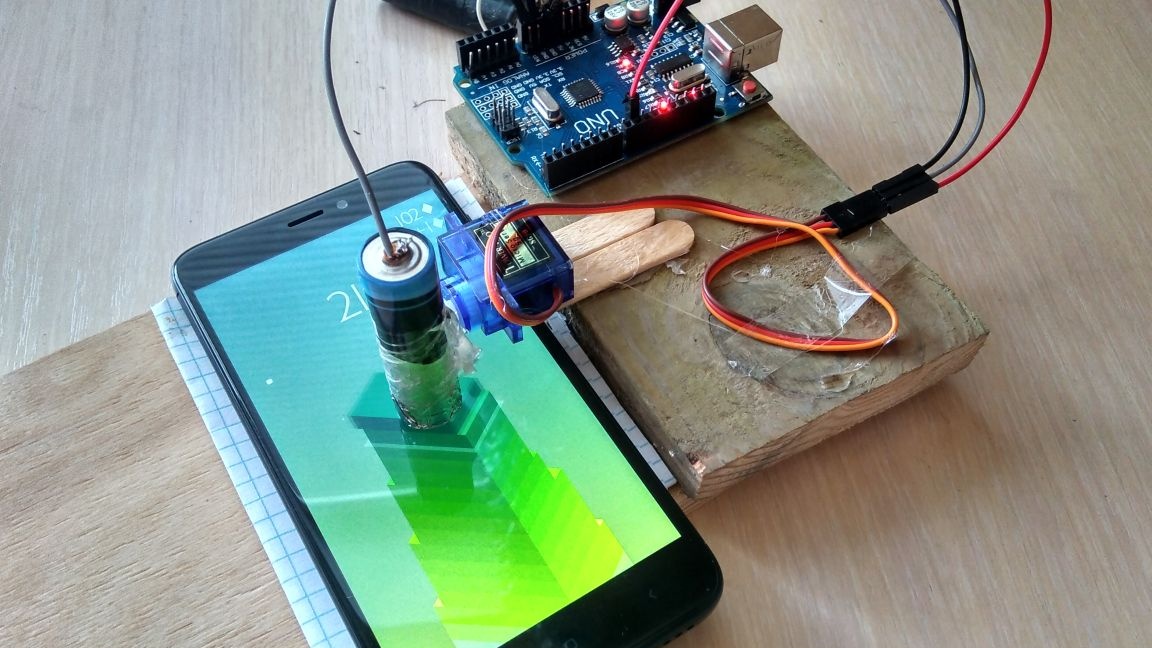
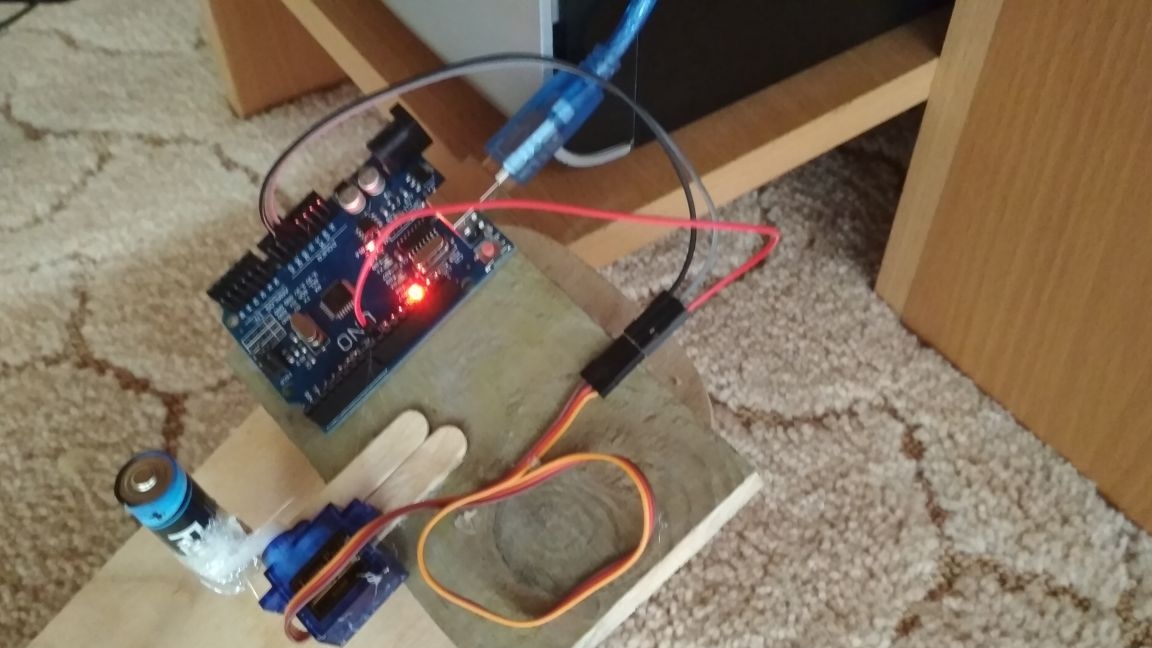
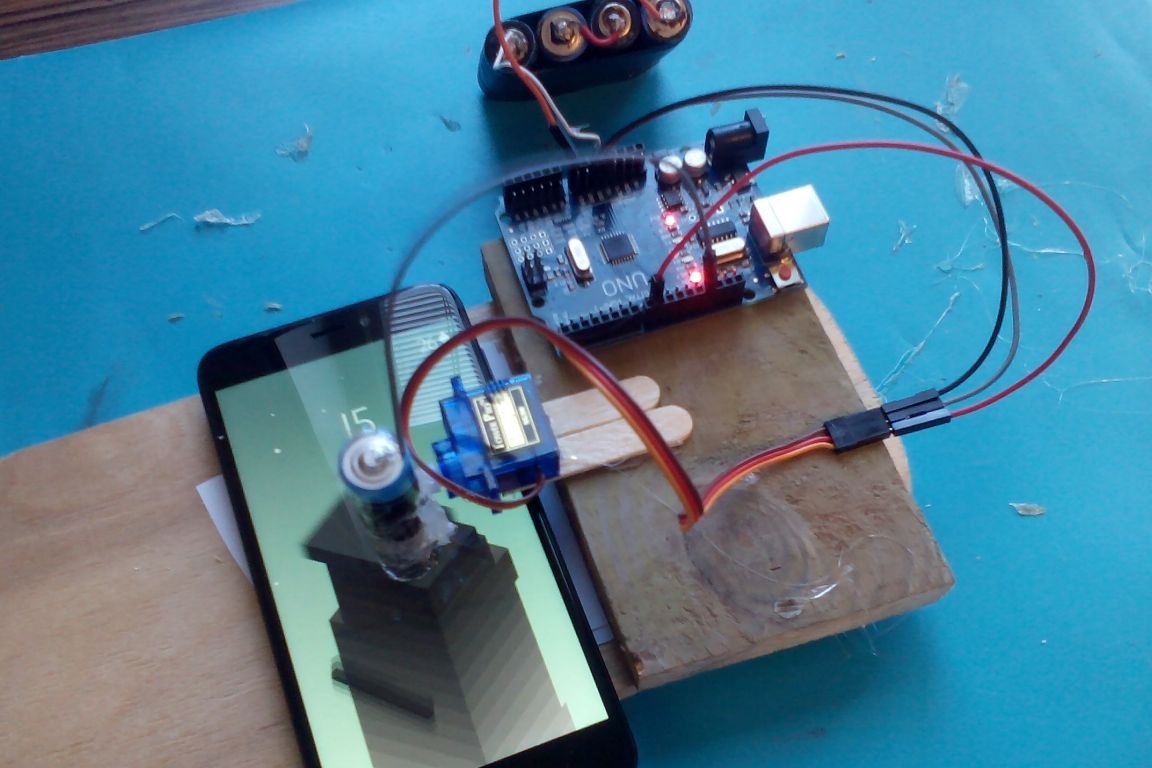
No, siinä kaikki! Yksinkertainen robotti valmis ja jää vain testata sitä! Aseta tämä puhelin kynän alle, käynnistä Stak-sovellus ja aseta puhelin niin, että se on nuolella osoitetun “play” -painikkeen yläpuolella, kytkemme virta arduinoon joko käyttämällä erityistä sovitinta tai annamme plus “akusta” Uinille Arduinossa, ja miinus gnd. virran kytkemisen jälkeen robotti alkaa heti "pelata". Ja vaikka johtuen siitä, että en käyttänyt tavallista kynää, vaan akkua, robotti ei melko usein päässyt tahtiin ja meni ohi, se "pelasi pitkään. Jos kaikki tehdään erittäin tarkasti, se yleensä pelaa, kunnes puhelin putoaa.

Kiitos kaikille huomiostamme!