



Tämä artikkeli käsittelee miten tee se itse robotti taiteilija. Tietenkin sinulla on sellainen kuva robotti ei piirrä, mutta yllättää tuttavia tai ystäviä hänen kanssaan homebrew oksa se on mahdollista. Ja jos kerät tällaisen robotin lasten kanssa, se auttaa epäilemättä luovien luonnepiirteiden kehittymistä.
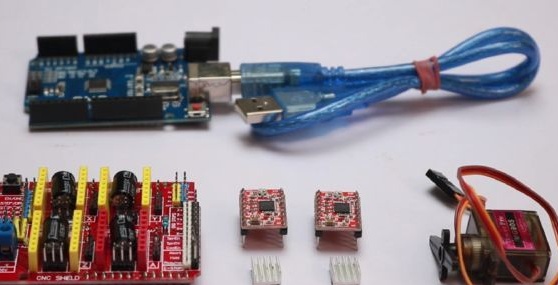
Työkalut ja materiaalit:
-Kaksi LED-asemaa;
-Lauta 3 mm;
-Pila;
-Kley;
-
-
-
-
-
-Tietokone;
- ruuvimeisseli;
-Juottimet:
-Smazka:
-Lineyka;
-Karandash;
-Drel;
-Glue ase;
-Kirjoituskynä;
- sakset;
-Pruzhina;
-Nitka;
- akku 12V;
näkö-;
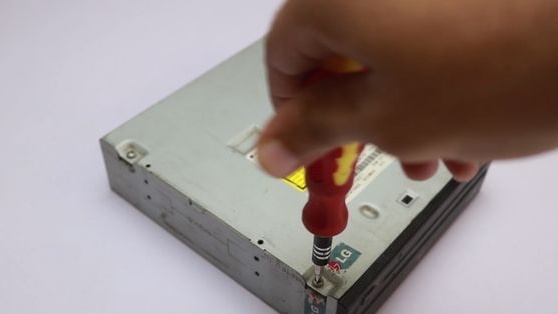
Vaihe yksi: LED-asemat
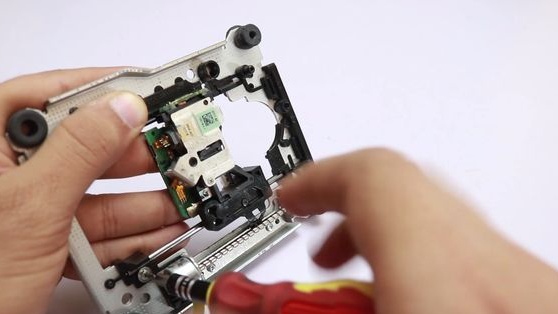
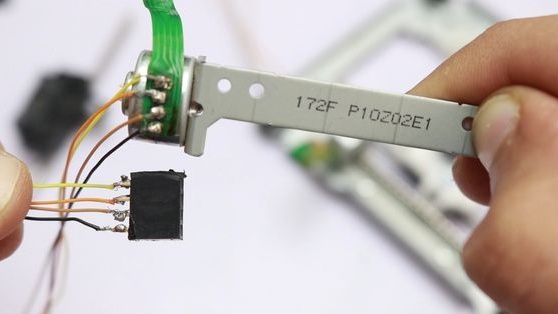
Jäsentää CD-asemat. Poista kannet, elektroniikkalevy.




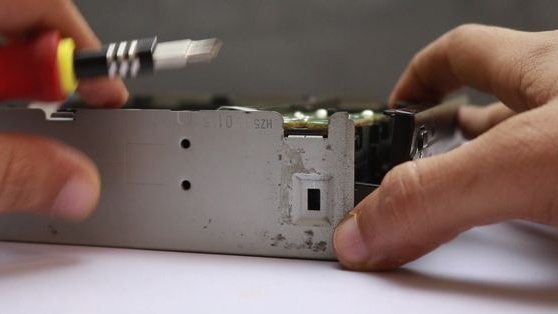

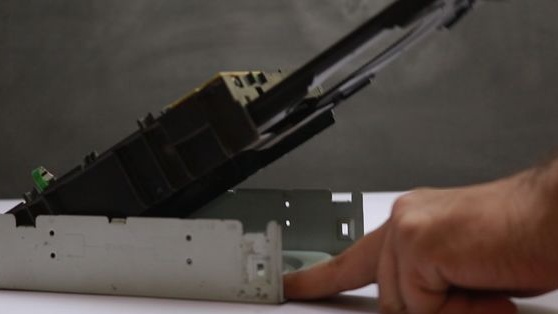
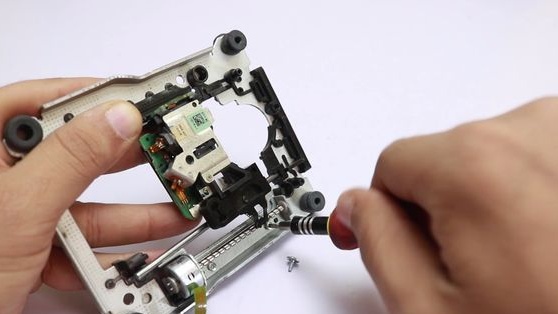
Poistaa rungosta rungon, jossa on vaunu ja askelmoottori.
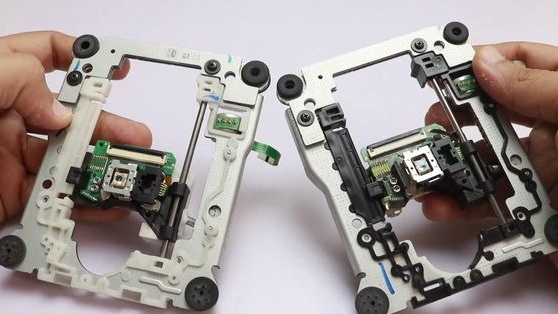
Hän asettaa yhden kuvan, jäsentää toisen.
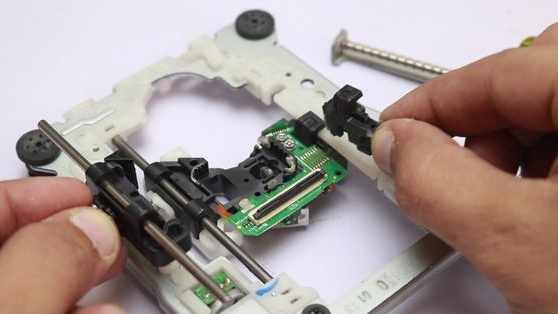
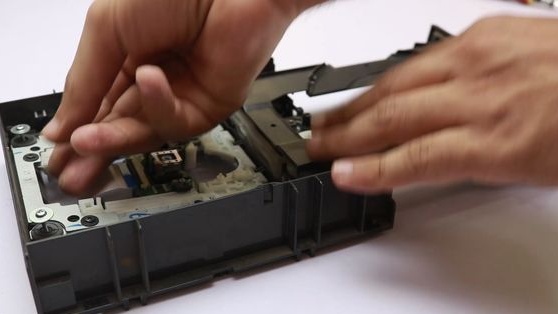
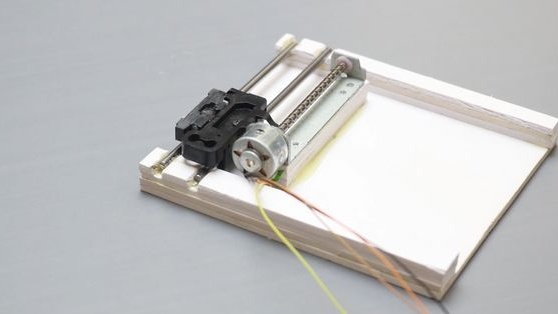
Toisesta CD-asemasta tarvitaan vain vaunu ja askelmoottori.


Voitele kelkka.
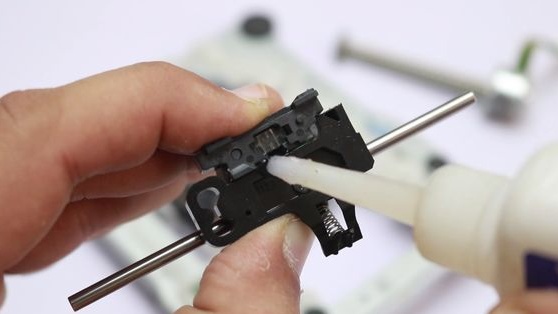
Juotteet askelmoottorien vaijeria varten. Liitin on juotettu johtimien toisiin päihin.
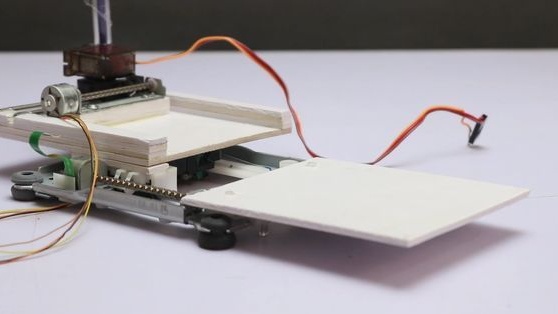
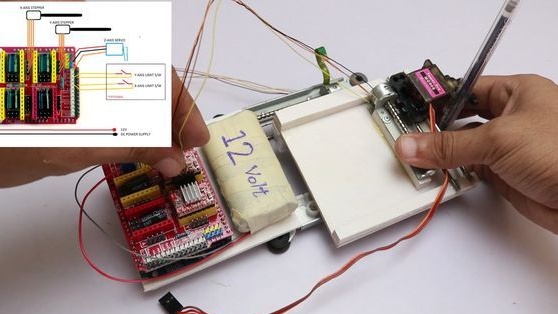
Vaihe toinen: X-akseli ja Y-akseli
Sahaa pöydältä (edelleen pöytä) 10 * 9 cm. Pöydän reunoista liimaa tangot 2 * 10 cm.
Leikkaa urat kuljetusohjaimiin. Liimaa ohjaimet.

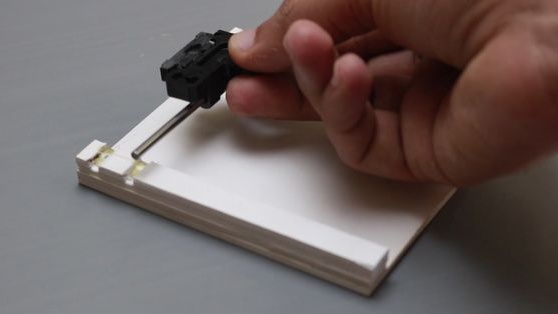
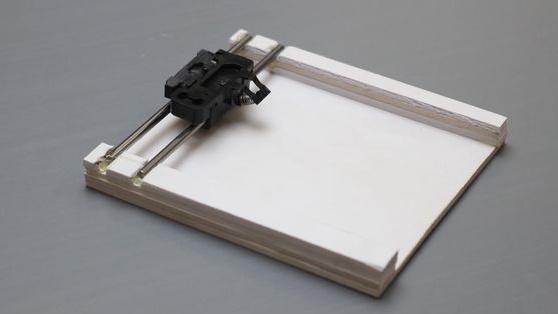
Vaunun viereen liimataan 3 * 5 cm: n lohko. Ruuvit askelmoottoriin. Akseli X on valmis.
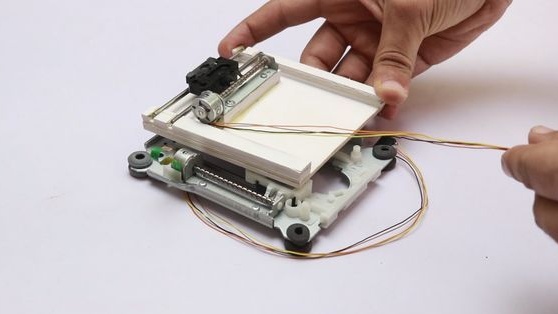
Liimaa X-akselimekanismin Y-akselimekanismilla.

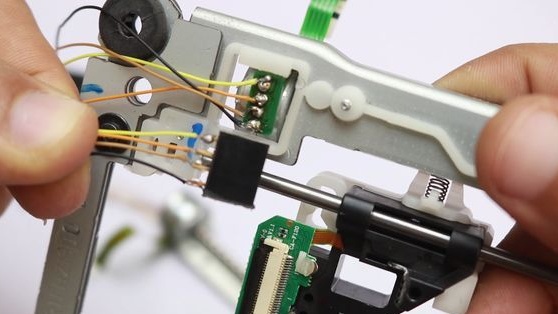
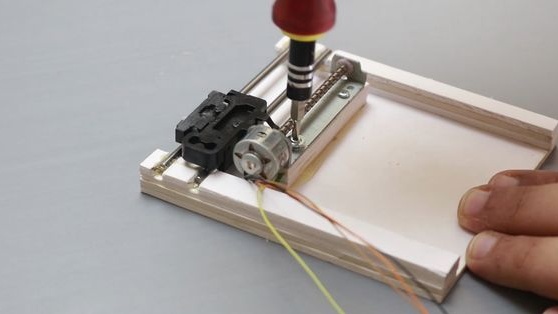
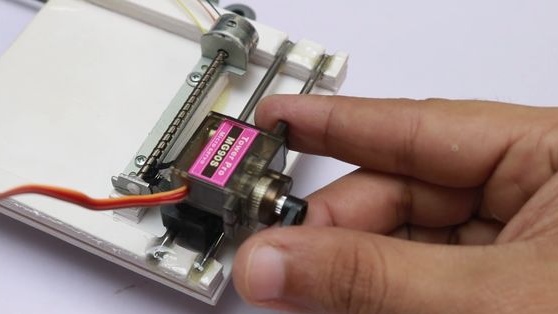
Kiinnittää servovoimansiirto kelkkaan akselin osoittaessa ulospäin (katso kuva)
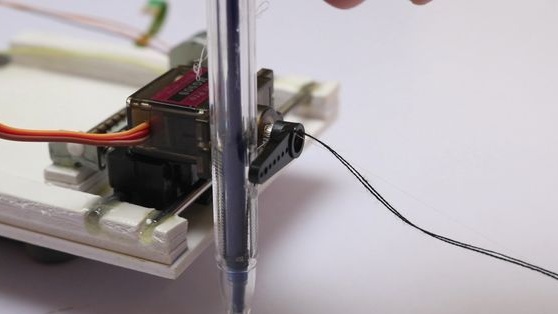
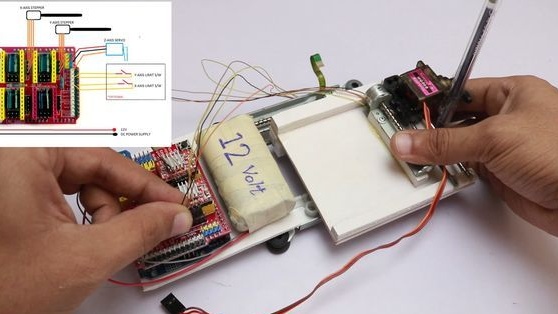
Vaihe kolme: kynä
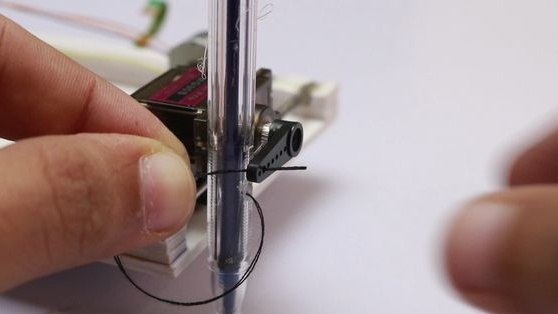
Jäsentää kynän. Leikkaa 1 cm akselin yläpäästä. Kierrä jousipuoli tankoon. Kääri lanka sen jälkeen kun se on vetäytynyt noin 1 cm sauvan pohjasta. Siteitä. Kahvassa reikä. Vedä lanka reikään. Asenna sauva paikoilleen. Asettaa korkin.






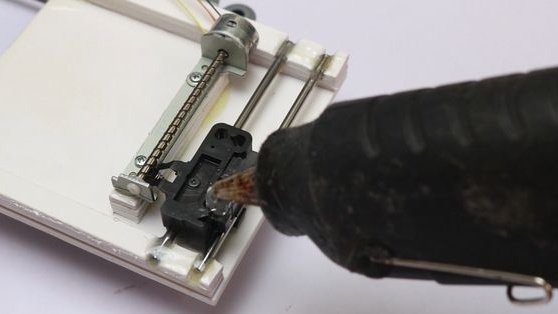
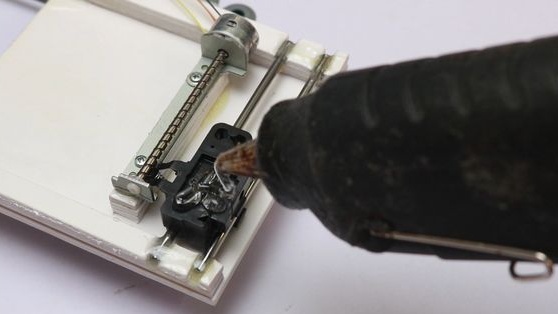
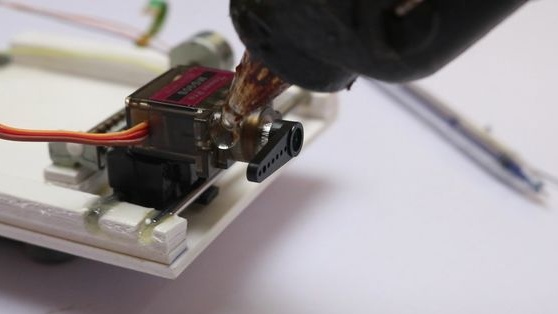
Liimaa kahvan servomoottorin runkoon (sauvan pallo lepää pintaa vasten). Kiinnittää langan toinen pää servovipuun.
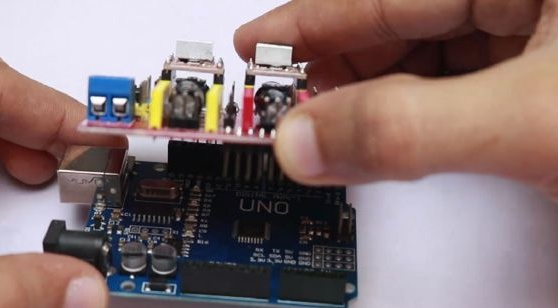
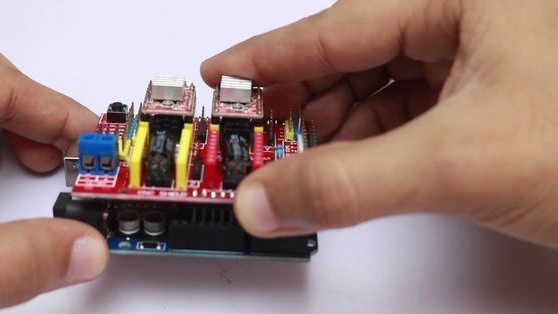
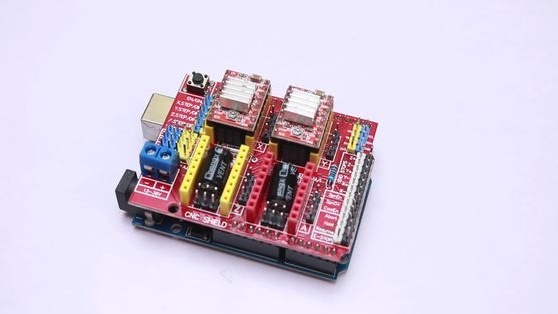
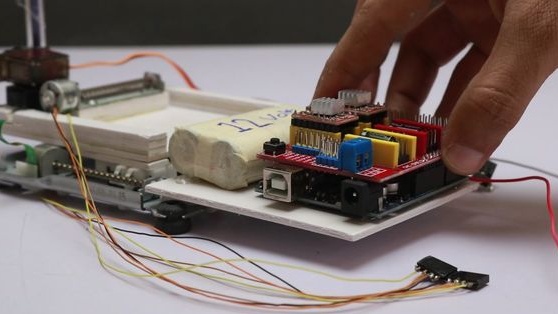
Vaihe neljä: moduulin kokoonpano
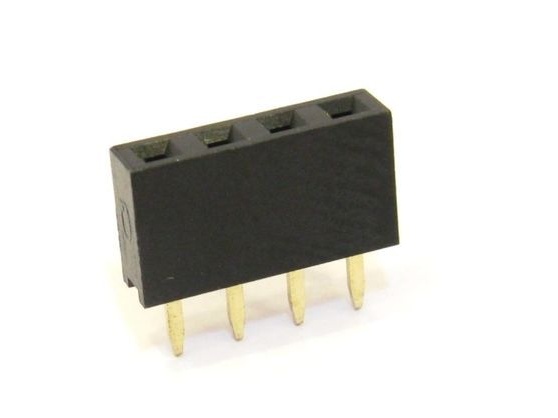
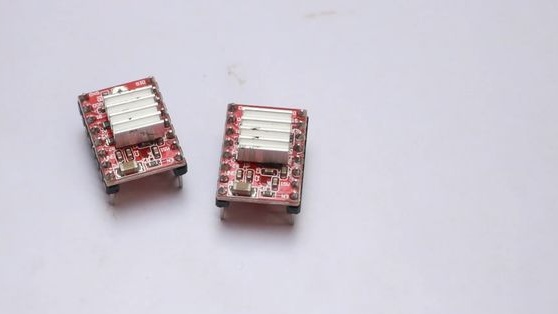
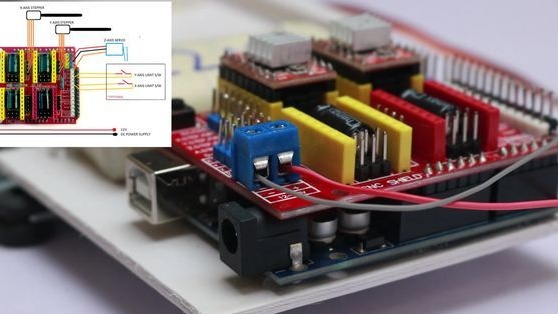
Asentaa kaksi askelmoottorimoduulia, joissa on patterit laajennuskorttiin.
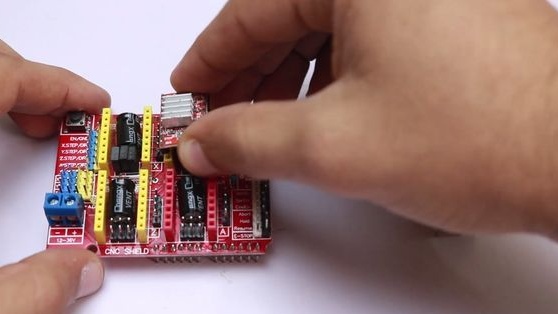
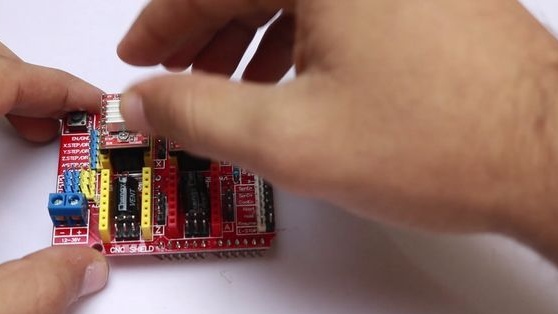
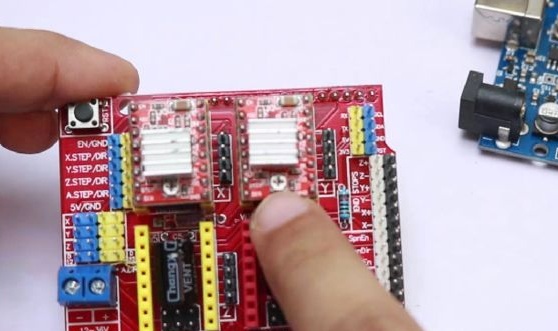
Asentaa laajennuskortin päälle Työläs.
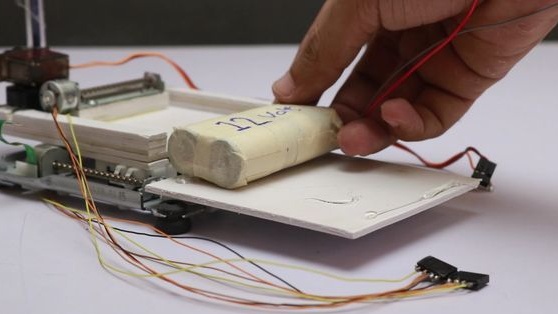
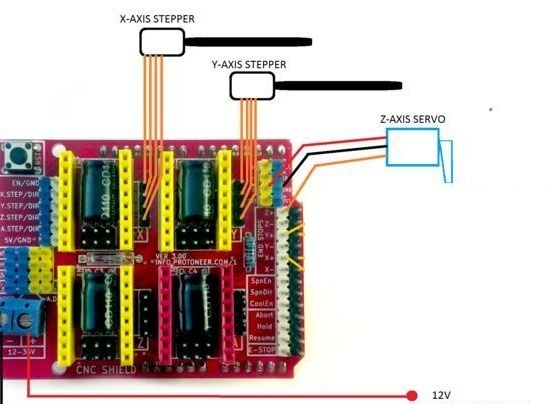
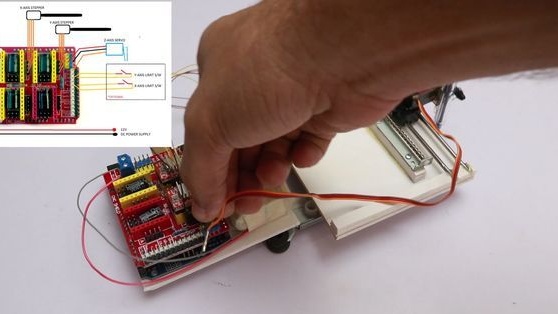
Vaihe viisi: Yhdistä
Asentaa akun. Kiinnittää ja yhdistää kaikki elementit annettujen kaavioiden mukaisesti.
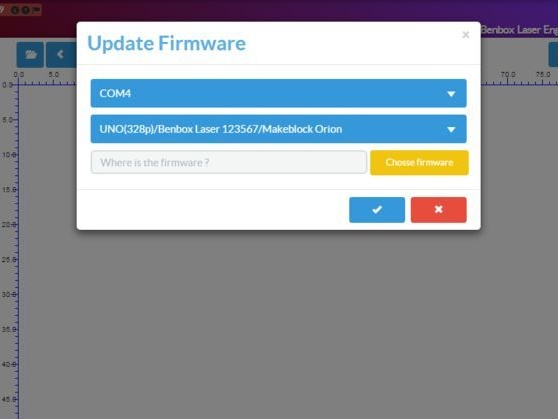
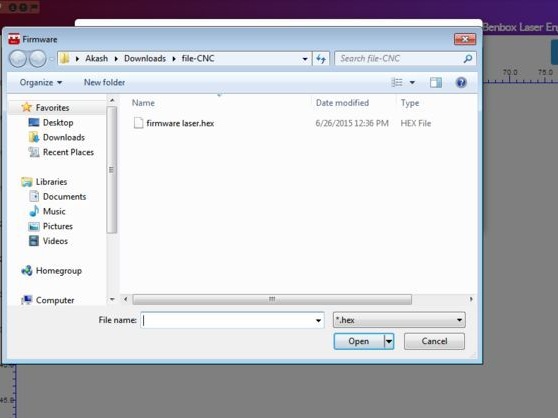
Vaihe kuusi: Ohjelmisto
Lataa ohjelmistoja. Avaa ohjelmiston. Kytkee Arduino USB-liitännän. Päivitettäessä laiteohjelma valitsee COM (3.4 tai 5).
Asettaa parametrit.
Ensimmäinen sivu:
Sarjaportti: COM (3.4 tai 5)
Pen Up: 35
Kynä alas: 22
Nopeus: 800 (voit lisätä)
Aika: 200
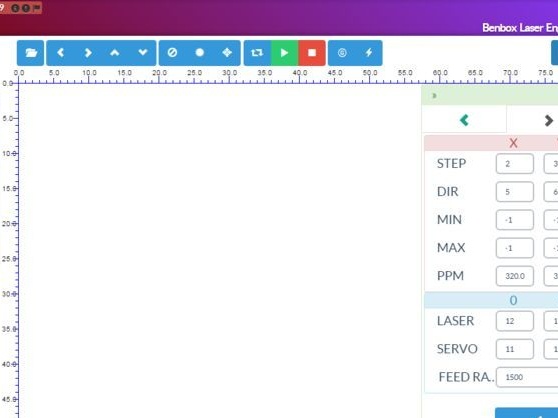
Toinen sivu:
Vaihe: x = 2 y = 3
Rež: x = 5 y = 6
Min: x = -1 y = -1
Enimmäismäärä: x = -1 y = -1
Ppm: x = 320 y = 320
laser: 0 = 12 1 = 12
Servo: 0 = 11 0 = 12
Syötä Ra. : 1500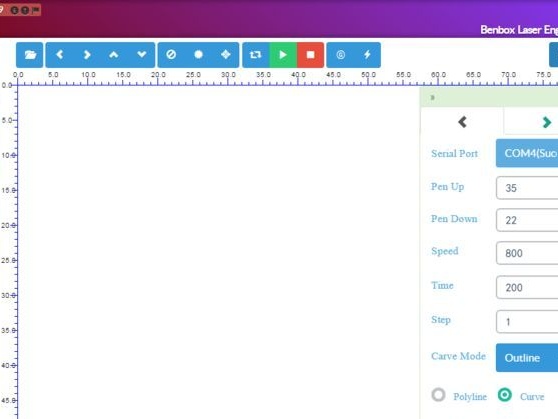
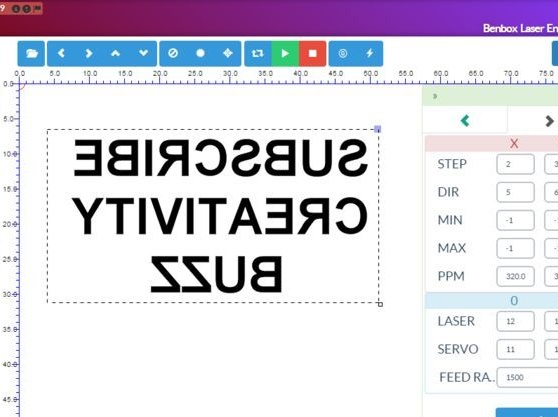
Robottitaiteilija on valmis. Jäljellä on tekstin syöttäminen kenttään ja ohjelman suorittaminen.
Koko robottitaiteilijan luomisprosessi näkyy videossa.