

Vibrobotit ovat sellaisia robotitjotka liikkuvat värähtelyjen takia. Huolimatta siitä, että heidän muotoilunsa on melko yksinkertaista, he ovat työssään yhtä vaikuttavia kuin teknisesti edistyneemmät veljensä. Tällainen robotti käyttää harjaksia liikkeelle, tämä on eräänlainen sen jalkojen.
Artikkelissa kuvattu robotti voi itsenäisesti muuttaa liikkumisen etenemistä ja kiertää sinänsä esteitä. Kokeiluna tekijä loi kaksi robottia, joihin asennettiin erilaisia energialähteitä ja moottoreita. Periaatteessa käytetyille materiaaleille ei ole tiukkoja standardeja, tärkeintä on noudattaa annettua mallia robottia kootaessa.

Materiaalit ja työkalut valmistukseen:
- nylon siteet kooltaan 3x150mm;
- mustanvärinen eristenauha;
- 9 voltin akku (6F22);
- laserlevy (CD- tai DVD-levyllä ei eroa);
- suojakotelo;
- 9 voltin akkupistoke;
- epäkeskeinen (poista).

Robotin valmistusprosessi:
Ensimmäinen askel. Luo robotin perusta
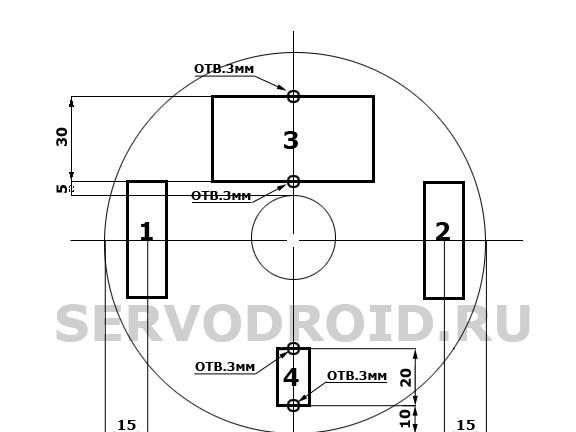
Robotin perustana käytetään tavallista CD- tai DVD-levyä. Tee reikiä siihen selvästi kuvassa esitetyn kaavion mukaisesti. Poikkeuksetta kaikki reiät porataan 3 mm: n poralla. Tämä halkaisija on aivan tarpeeksi käytettäessä nailon siteiden kiinnittämiseen. Jos päätetään käyttää toista asennusmenetelmää, reikät voidaan porata mihin tahansa muuhun kokoon. Ehdotettu piirustus sopii mihin tahansa robotin kokoonpanoon.
Numerot 1 ja 2 osoittavat harjojen asennuspaikat, neliölle on asennettu akku numerolla 3 ja moottori on asennettu neliöön 4.
Vaihe toinen Valmistamme ja asennamme muuttovälineitä
Koneiston avulla robotti liikkuu. Niiden tekemiseksi sinun on otettava kaksi hammasharjaa. On parasta, että harjat ovat harjakorkeuden ja muodon kanssa samat. Jos muoto on erilainen, se voidaan oikaista saksilla.
Nyt harjakset on asetettava suuntaan. Tätä varten otetaan teippi ja harjakset kääritään kuvan osoittamalla tavalla. Tässä asennossa harjaa tulisi pitää noin tunnin ajan, jotta harjakset muistavat tämän aseman. Valokuvassa harmaa nuoli osoittaa harjasten kallistussuunnan.

Kun haluttu muoto on asetettu, sinun on leikattava osa harjasilla hammasharjasta. Sitten sinun on otettava liimapistooli ja asennettava harjakset levylle määritettyihin paikkoihin. Kaikki työt on suoritettava nopeasti ja tarkasti, koska kuuma liima jäähtyy nopeasti ja kovettuu.Sinun on yritettävä asentaa harjat niin, että ne seisovat yhdensuuntaisesti toistensa kanssa.
Harjojen harjakset tulee osoittaa taaksepäin, toisin sanoen, akkua kohti 9 voltilla. Käytön aikana robotti liikkuu harjasten suuntaan, ts. Akun sijainti on robotin takana.

1 - kiekko, 2 - sulateliima, 3 - reiät moottorin asentamiseen, 4 - reiät akun asentamiseen. Valkoiset nuolet osoittavat harjasten suuntaa.
Vaihe kolme Epäkeskeisen tekeminen
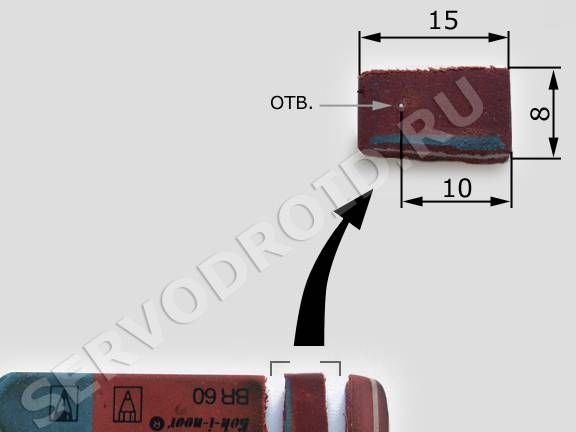
Tärinän saamiseksi moottorin akselille on asetettava epäkesko, ts. Epätasapainoinen esine. Kirjailija teki epäkesko-osan pyyhekumiin leikkaamalla sopivan kokoinen pala. Tee reikä valkoisen nuolen osoittamaan paikkaan. Sen ei pitäisi olla suuri, koska epäkesko liu'u moottorin akselilta. Se voidaan tehdä neulalla.
Vaihe neljä Suojakuoren valmistus.
Koska pyörivä pyyhekumi antaa tärinän robotin toimimiseksi, on suositeltavaa suojata tämä paikka erilaisilta esineiltä. Lisäksi tällainen suojaus antaa robotille mielenkiintoisemman ilmeen. Suojapeite on valmistettu paperista, joka koostuu useista kerroksista. Sinun on valmistettava sylinteri paperista; sen koko riippuu moottorin koosta. Paperille jäykkyyden lisäämiseksi se voidaan sivellä liimalla ja siksi laittaa vielä muutama kerros. Tai voit käyttää pahvia näihin tarkoituksiin.
Sylinterimäisen muodon luomiseksi moottori kääritään yksinkertaisesti paperilla päälle.




Vaihe viisi Robotin lopullinen kokoonpano
Moottori asennetaan tiettyyn paikkaan ja kiinnitetään sitten nylon-tasoon. Sellaisia tasoitustuotteita voi ostaa rakennusmateriaalien myyntiin erikoistuneissa liikkeissä.
Akku on myös kiinnitetty tarkasti. On tärkeää ottaa huomioon, että akun on oltava selkeästi keskitetty, muuten robotin suunta voi muuttua. Muuten, tällä tavalla tulevaisuudessa on mahdollista asettaa liikkeen etenemissuunta kotitekoinen.


Nyt pidikkeen ja moottorin väliin sinun täytyy asentaa pieni kytkin. Yhteenvetona voidaan todeta, että liittimen liittäminen akkuun on vielä jäljellä ja voit aloittaa robotin testauksen. Johdot on kytketty väreillä.
Kron-akkua käytettäessä kytkintä ei kuitenkaan tarvitse asentaa, vaan robotti voidaan kytkeä päälle kytkemällä liitin.
No, robotin toisessa versiossa voit yksinkertaisesti poistaa akun laitteesta, mutta tietysti on lupaavampaa kytkeä kytkin.
Siinä kaikki, robotti on valmis, voit aloittaa testauksen. Halutun tuloksen saavuttamiseksi voit yrittää muuttaa napaisuutta, joten moottori pyörii vastakkaiseen suuntaan ja robotti käyttäytyy eri tavalla.