

tällaisen robotti on jo luotu ja sen nimi on DIY: LightBot. Lisäksi kuka tahansa voi kerätä sen, kaikki luomiseen tarvittavat elementit ovat helposti löydettävissä, ja robotti kootaan yksinkertaisesti. Tämäntyyppinen robotti menee jatkuvasti omistajan jälkeen pimeässä ja korostaa sen oikeassa paikassa, mikä estää taskulampun pitämisen kädessä. Omistaja valvoo robottia omistajan jalkaan kiinnitetyn infrapuna-anturin avulla.
Materiaalit ja työkalut robotin luomiseen:
1. Infrapunavalo. Tällainen laite koostuu neljästä infrapunavalosta, jotka löytyvät television kaukosäätimestä.
2. Kaksi pyörää sarjasta K'nexiä tai lasten leluja.
3. Kaksi pientä moottoria (löytyy lasten leluista).
4. Kaksi infrapunatransistoria, kuten NPN tai fotorezistori. Infrapunavalotransistoria ei ole vaikea ostaa.
5. Kolme AA-paristoa ja yksi 9 voltin.
6. PVC-putki.
7. Kuumasulaliima.
8. Kertakäyttöinen muovihaarukka.
Robotin valmistusprosessi:
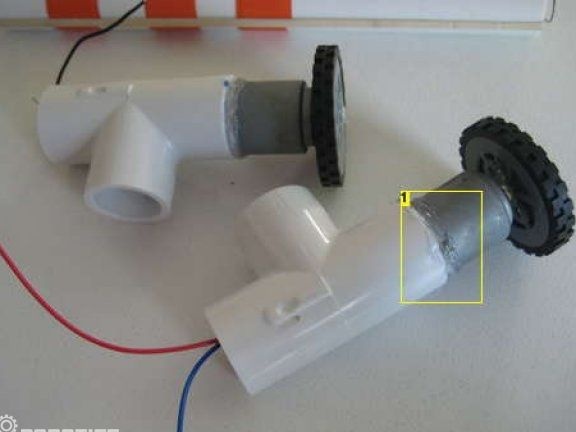
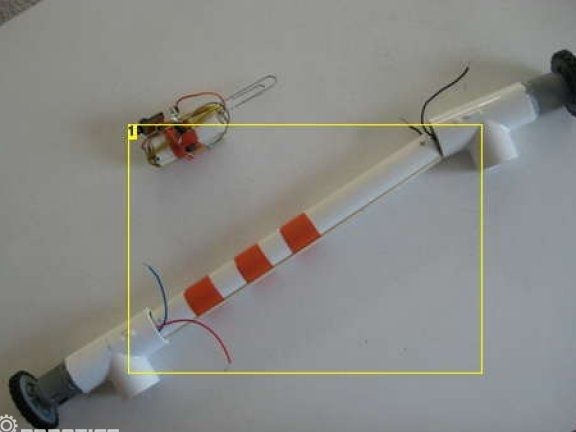
Ensimmäinen askel. Moottorin asennus
Ensin on asennettava moottorit. Niiden asennukseen käytetään muovisia tees-teitä, jotka sitten asetetaan pääputkeen. Moottorit kiinnitetään kuumasulaliimalla. Tätä liimaa ei tarvitse valittaa. Myös tässä vaiheessa pyörät voidaan laittaa moottorien akselille. Jotta ne pysyisivät tiukasti, ne voidaan kiinnittää myös sulateliimalla.
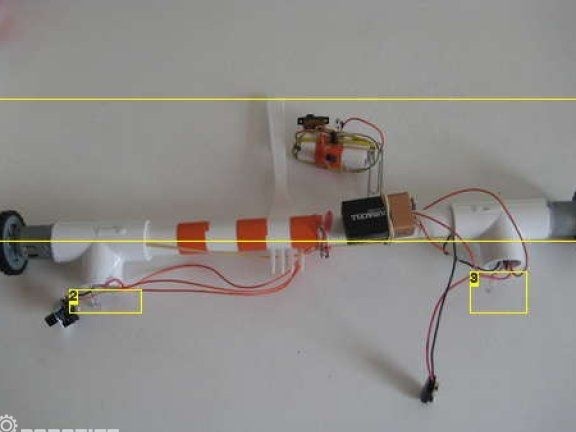
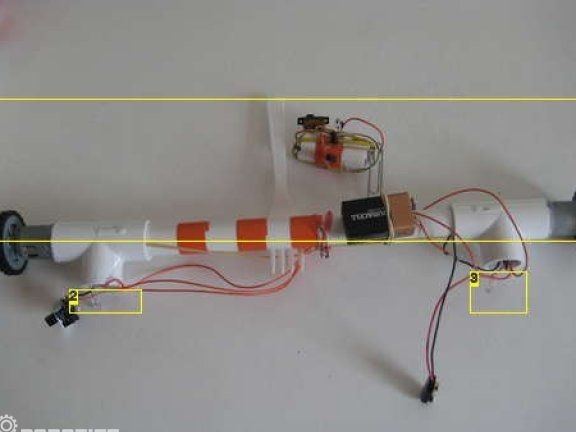
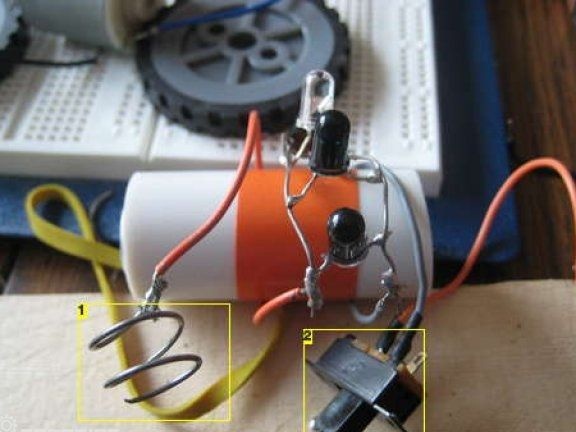
Vaihe toinen Valontutkijoiden asentaminen
Infrapuna-majakan seuraamiseksi tarvitaan valontutkijoita. Ne ovat eräänlainen robottisilmä. Sen mukaan, mihin suuntaan valo tulee, robotti kiihdyttää yhtä moottoreista kääntyä oikeaan suuntaan.
Valovastukset on kiinnitetty "teesiin" numeroiden 2 ja 3 osoittamiin paikkoihin. Näihin asentoihin ne voidaan kiinnittää kolmen sauvan liimalla.
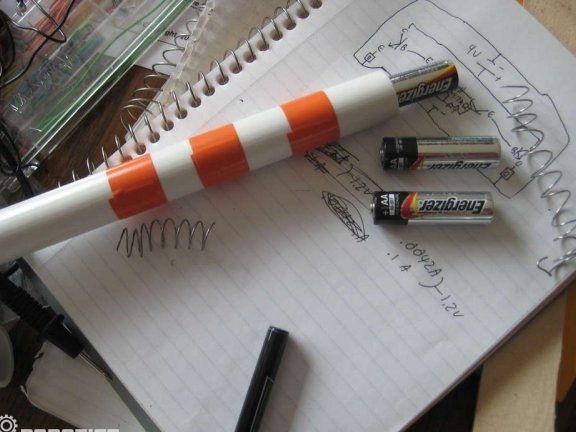
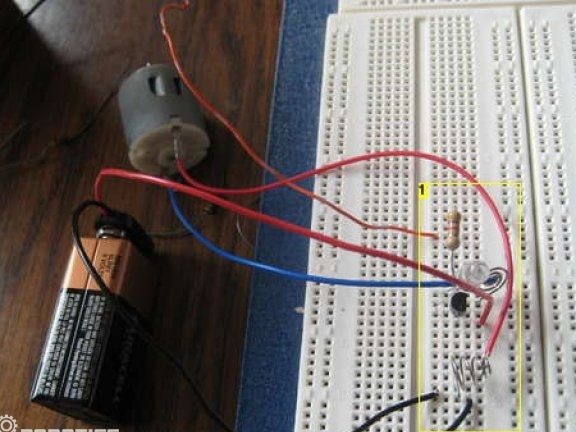
Vaihe kolme Virtalähteen asennus
Yhteensä robotti toimii kahdella virtalähteellä. Nämä ovat kolme AA-paristoa ja yksi 9 voltin paristo. Mitä sormen paristoihin tulee, ne on asennettu putken sisään.No, "Krona" -tyyppinen akku on kiinnitetty luuriin ulkopuolelta.
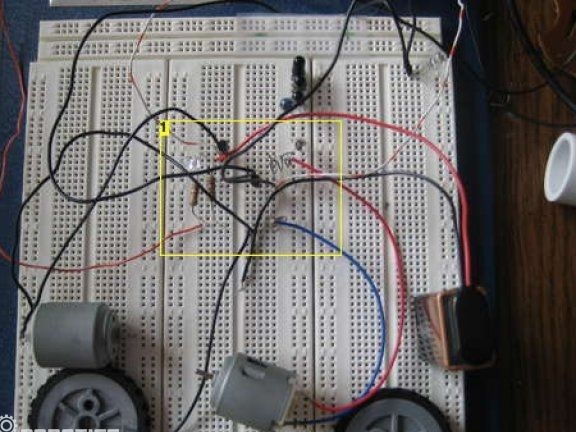
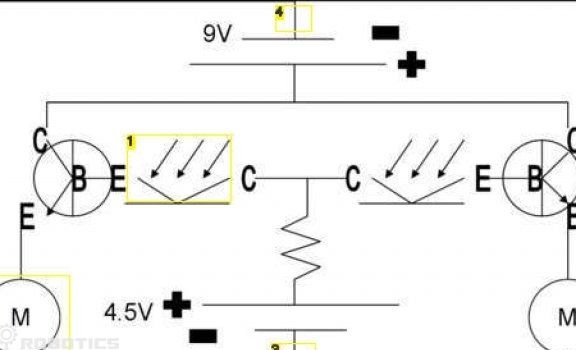
Vaihe neljä Robottipiiri
Järjestelmä on suunniteltu siten, että jos robotti näkee säteilyn toiselta puolelta, se kiihdyttää moottoria vastakkaiselta puolelta, joten robotti kääntyy ympäri. Haluttu moottorin nopeus saavutetaan korvaamalla vastukset kokeellisesti.
Toinen piiri voidaan täydentää kytkimellä. Se on asennettava siten, että se keskeyttää robotin virransyötön.
Kaaviossa numero 1 tarkoittaa fototransistoria, 2 - moottorin ohjainta, 3 - kytkimen asennuspaikka, 4 - voit myös asettaa kytkimen tähän.
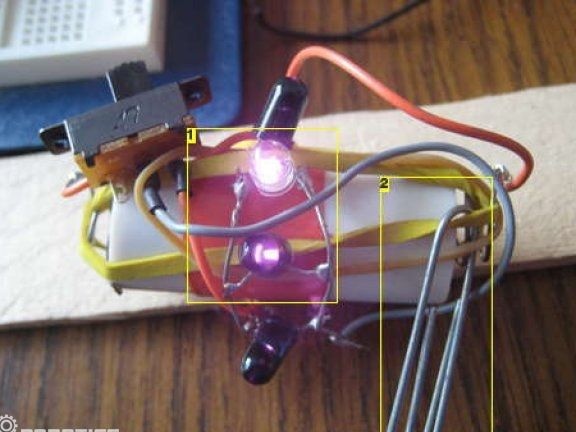
Vaihe viisi Luo infrapunavalo
Infrapuna-majakan luomiseksi otetaan lyhyt polyvinyylikloridiputki, johon on asennettu yksi AA-paristo. Koskettimet pidetään elastisen nauhan ansiosta, ja neljän infrapunadiodin virtalähdettä ohjataan kytkimellä. On mahdotonta nähdä tällaista valoa silmällä, jotta voidaan tarkistaa niiden diodien toimivuus, joita niitä on tarkasteltava digitaalikameran avulla. Majakka kiinnitetään tavallisella paperiliittimellä jalkaan.
Vaihe kuusi Robottiyksikön viimeinen vaihe
Nyt kaikki täytyy kytkeä kaavion osoittamalla tavalla. Mekaaninen osa on myös koottava, eniten huomiota on kiinnitettävä valotutkijoihin, niiden on kiinni, koska muuten he eivät pysty poimimaan majakan signaalia. Nyt kun robotti on kytketty päälle, sinun täytyy kävellä sen ympäri ja nähdä mitä se tekee.
Tietysti robotti ei välttämättä mene omistajan jälkeen ensimmäistä kertaa, mutta sinun ei pidä epätoivoa, koska virtapiiriä voidaan muokata ja robotti voidaan konfiguroida tarpeen mukaan. Kirjoittajan mukaan tulevaisuudessa ohjelmisto voidaan asentaa robottiin, jonka avulla se tunnistaa esineet ja ihmiset. Voit myös asentaa monia erilaisia antureita ja tehdä tästä robotista korkean teknologian laitteen.