

Pultoideiksi kutsutaan sellaisia robotteja, joita voidaan ohjata kauko-ohjaimella kaukosäätimellä. Näihin tarkoituksiin voidaan käyttää esimerkiksi television kaukosäädintä. Tärkein tehtävä, jonka kirjailija asetti itselleen tällaisen robotin valmistuksessa, on sen kokoamisen yksinkertaisuus. tarkastelun alla robotti ei vaadi painetun piirilevyn valmistusta, asennus on erittäin helppoa ja tapahtuu vain pahville.

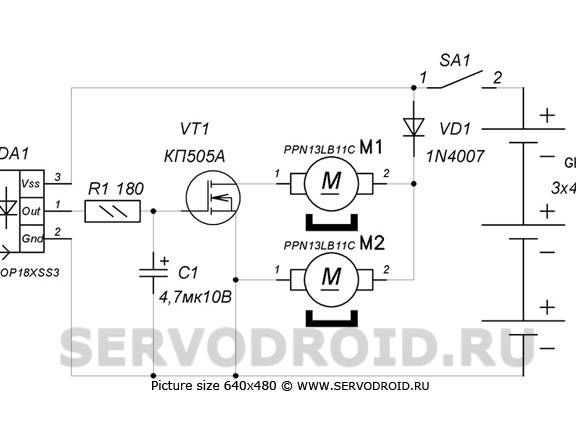
elektroninen Robottipiiri koostuu vain neljästä komponentista: diodi, transistori, valodetektori ja kondensaattori. Mekaanisen osan valmistamiseksi tarvitaan myös minimaalisesti materiaaleja, esimerkiksi kotelon valmistamiseksi käytetään CD-ROM-levyä.
Tällä tavalla valmistettu robotti ymmärtää vain yhden joukkueen. Kannattaa painaa mitä tahansa ohjauspaneelin painiketta, ja robotti alkaa kääntyä. Jos jatkat painikkeen pitämistä, kiertokulma kasvaa, minkä seurauksena robotti voi kääntyä 360 astetta.
Robotti laite
Kompaktilevyä käytetään robotin valmistuksen perustana. Voimaelementit kiinnitetään M2-pulteilla. Elektroninen kortti, myös paristolokero, kiinnitetään teipillä.
Nyt moottorien kohdalla ne sijaitsevat kulmassa ja niiden akselit lepäävät tietä vasten. Pyöriä ei siis tarvitse valmistaa erikseen. Pultit kiinnitetään kehyksillä, jotka on valmistettu koululinjasta.
Kolme ”pienen sormen” akkua syöttää robottia, ne asennetaan erikoistapauksessa. Virtalähde tuottaa yhteensä 4,5 V.
Ja lopuksi, valodetektori, se on vain yksi täällä, se on eräänlainen TSOP. Se vastaanottaa moduloituja signaaleja mistä tahansa kaukosäätimestä, jonka ansiosta robottia voidaan ohjata.
Materiaalit ja työkalut valmistukseen:
- nylon siteet;
- valodetektorityyppi TSOP1836;
- yksi kenttävaikutteinen transistori (KP505A);
- CD-levy;
- täynnä paristoja kolmessa osassa;
- kolme "pientä" paristoa;
- muovinen hallitsija;
- ruuvit rungon kiinnittämistä varten;
- johdot ja kytkin (cross-type).
Valmistusprosessi:
Ensimmäinen askel. Piirilevyn suunnittelu
Painetun piirilevyn valmistamiseksi sinun on ensin tulostettava piirustus paperille. Sinun pitäisi saada kaksi kuvaa, yhdestä asennuspiirroksesta ja taulun toiselta puolelta. Levy koostuu yhteensä kolmesta osasta, keskellä on aaltopahvi, joka on liimattu toimistopaperilla molemmille puolille. Levyn liimaamiseksi on suositeltavaa käyttää kuivaa liimapuikkoa.
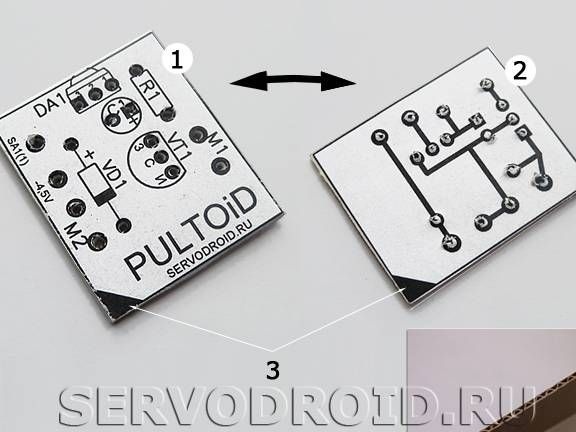
Vaihe toinen Radiokomponenttien asennus
Asennettaessa elektroniikkakomponentteja on tärkeää unohtaa tai katkaista koskettimien ulkonevat reunat. Myöhemmin ne taipuvat ja siten syntyy sähköpiiri. Kaikki elementit yhdistetään juottamalla määritellyn kaavan mukaisesti.
Virtapiirin vastus R1 on korvattava kaikilla hyppyjohdoilla. Fotodetektorin suhteen oikea kytkentäjärjestys näkyy myös kuvassa.

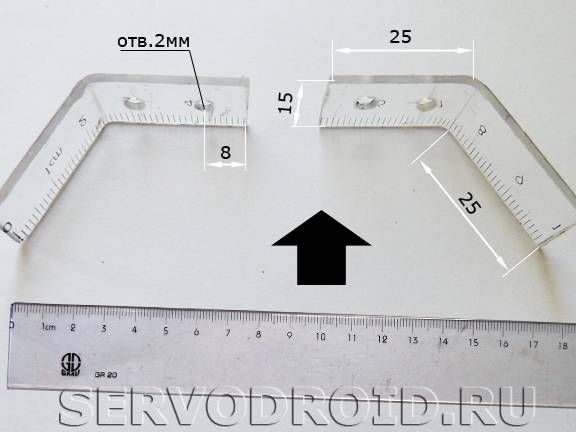
Vaihe kolme Sähkökehyksen asennus
Moottorien asentamiseksi sinun on luotava voimakehys. Aineistona käytetään tässä muovikoulun hallitsijaa. Se on leikattava kahteen osaan ja taivutettu kuvan osoittamalla tavalla. Jotta viivain alkaisi taipua, sinun on vietävä kuuma juotosraudan kärki taipumapaikkaan noin 2 mm etäisyydelle. Myös näihin tarkoituksiin voit käyttää rakennushiustenkuivaajaa. Viivain on taivutettava tasaisesti noin 30 asteen kulmaan.

Kun kehys on luotu, voit jatkaa sen asennusta. Ota tämä CD ja 2 mm ruuvit muttereilla. Lisäksi reikiä, joiden halkaisija on vähintään kaksi millimetriä, porataan oikeaan paikkaan ja runko kiinnitetään ruuveilla. Jotta kehys ei luiskahdu, sinun on kiinnitettävä kaksipuolinen teippi levylle ennen asentamista.
Vaihe neljä Etutuen asentaminen
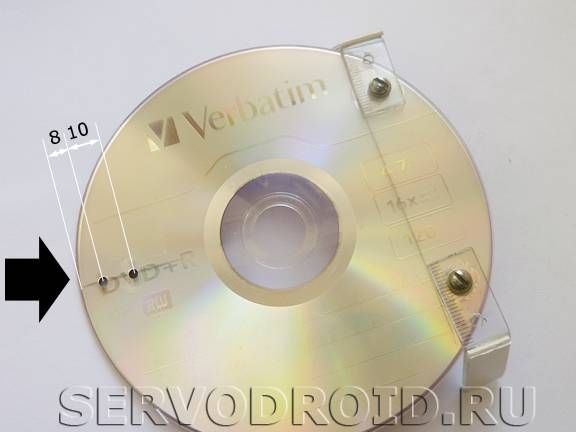
Levyn etuosaan on porattava kaksi reikää ja valmistettava nylon-taso. Alustan koon tulisi olla 3x150mm. Se on asetettava kuvan osoittamalla tavalla. Seurauksena tuloksena oleva tuki poistuu täydellisesti robotin käytön aikana ja liukuu tien varrella.


Vaihe viisi Moottorin asennus
Moottoriakselien liukumisen estämiseksi tielle on kiinnitettävä suojat. Ne on valmistettu kumista, joka löytyy heliumikynien tahnoista. Moottorien asentamiseksi sinun täytyy ensin liimata pala kaksipuolista teippiä tukeen, se estää liukastumisen. No, sitten moottorit kiinnitetään lopulta nylon-siteillä.

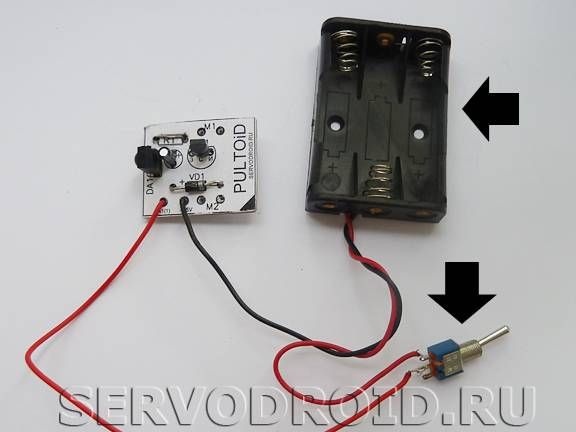
Vaihe kuusi Kytkin ja virtalähteen kytkentä
Virtalähteenä voit käyttää mitä tahansa akkua, jonka virta ei ylitä 5 volttia. Tässä tapauksessa koteloa käytetään kolmella sormen akulla, joiden kokonaistilavuus on 4.5 V.
Kytkimen suhteen se on asennettu virtalähteestä tulevan positiivisen koskettimen aukkoon. Punainen johdin on kiinnitetty taululle napaan SA1 (1) ja musta johdin tappiin -4,5 V.


Myös tässä vaiheessa voit kytkeä moottorit, niiden johdot on kytketty koskettimiin M1 ja M2.
Seitsemäs vaihe. Viimeinen vaihe
Viimeisessä vaiheessa kaikki elektroniset elementit on korjattava. Ne kiinnitetään levylle kaksipuolisella teipillä. Kytkimen osalta se on myös kiinnitettävä, tähän voit käyttää kuumaa liimaa.

Siinä kaikki, nyt robotti on valmis. Voit yrittää kytkeä sen päälle ja antaa komennon kääntyä millä tahansa kaukosäätimellä.