
BIBOT-1 -robotin erikoisuus on, että se pystyy suorittamaan kaksi tehtävää. Se voi liikkua valonlähteen takana tai mustaa viivaa pitkin, joka voidaan piirtää paperille. Robotti erittäin joustava asetuksissa, ts. myöhemmin on mahdollista säätää sitä mihin tahansa haluttuihin olosuhteisiin, ts. tehdä siitä herkempi valolle tai vähemmän. On myös mahdollista säätää moottorien pyörimisnopeutta, tämä antaa robotin toimia paremmin, etenkin linjaa pitkin liikkuessa.

Laite ja robotin periaate:
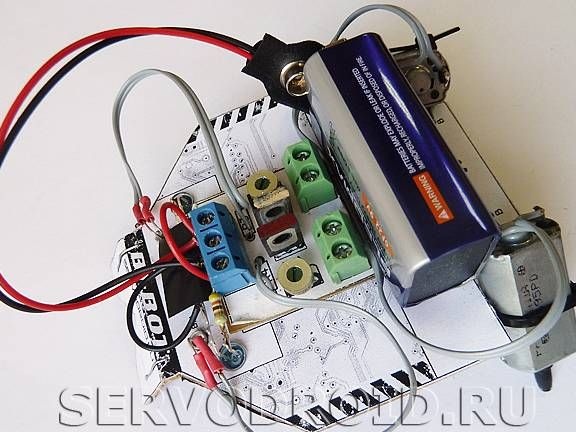
Robotin pohja on valmistettu pahvista, malli tulostetaan tulostimelle ja kaatuu sitten. Radiokomponenttimoduulin perustaksi otettiin tekstoliitti, moduuli on kiinnitetty robotin pohjaan. Rungon jäykkyyttä varten suunnittelussa käytetään erityisiä kylkiluita.
Moottorit on asennettu kuten useimmissa näissä DIY, eli kulmassa. Tästä syystä pyöriä ja vaihdelaatikkoa ei tarvitse laittaa. Akselit eivät liu'u pinnan yli, niihin asetetaan suojaimet.
Virtalähteenä käytetään 9 V -tyyppistä 6F22-akkua. Akku on kiinnitetty teipillä ja se on aina saatavana vaihtamista varten.
Mitä sitten kytkimeen autojen päätti välttää sen asentamista. Robotti kytkeytyy päälle ja pois päältä käsittelemällä akkuun kiinnitettävää pidikettä.
Ja lopuksi, robotin säätö. Robotin herkkyyden säätämiseksi järjestelmässä on kaksi säätövastusta. Kun ne pyörivät, voit säätää robotin herkkyyttä valolle, ja voit myös säätää moottorien pyörimisnopeutta. Mitä herkempi robotti on valolle, sitä nopeammin se liikkuu ja päinvastoin.
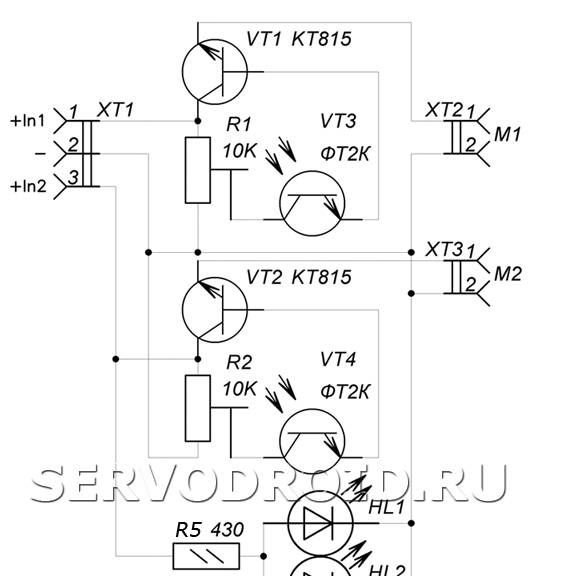
Toimintaperiaatteen suhteen kaikki on esitetty kaaviossa.
Materiaalit ja työkalut:
- 9 V akku ja pidike kytkemistä varten;
- kaksi liitintä moottorien kytkemiseen (kaksiosaiset riviliittimet);
- moottorit;
- nylon-tasoitus;
- suoja (kumirulla);
- kaksi valotransistoria;
- kaksi infrapuna-LEDiä;
- kiinnike nitojasta;
- kolmiosainen riviliitin virtalähteen kytkemistä varten;
viritys vastus -.

Valmistusprosessi:
Ensimmäinen askel. Piirilevyn suunnittelu
Maksu luodaan LUT-menetelmällä. Ennen työtä lasikuitupinta on puhdistettava huolellisesti, pestävä ja kuivattava perusteellisesti. Valmistamisen jälkeen johtavat radat on tarkistettava yleismittarilla oikosulun varalta.
Vaihe toinen asennus elektroninen elementti
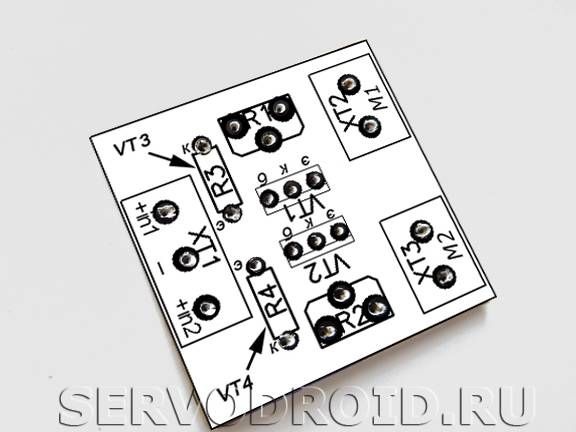
Seuraavaksi sinun on otettava paperille painettu piirustus ja kiinnitettävä se luotuun levyyn. Tässä tapauksessa paperin ja piirilevyn reikien on oltava täsmälleen samat. Seuraavaksi radiokomponentit asennetaan kuvan osoittamalla tavalla. Työn aikana vastuksien R3, R4 asennuksessa on asennettava valotransistorit VT3, VT4.
Kolmiosaisen riviliittimen XT1 äärimmäiset osat on kytkettävä kiinnitysjohtimella. Koskettimien liitoskohdat on eristettävä hyvin, on parasta käyttää näihin tarkoituksiin lämpö kutisteputkea.
Vaihe kolme Kuinka luoda tapaus
Runkopiirustus on painettava tavalliselle A4-arkeille. Seuraavaksi sinun on otettava pala aaltopahvia ja kiinnitettävä piirros siihen, myöhemmin tapaus on leikattava kehän ympärille.
Jos sakset-piktogrammi on lihavoitua viivaa pitkin, leikkaukset olisi tehtävä. Myöhemmin, mustia katkoviivoja pitkin, sinun täytyy taivuttaa pahvi kuten kuvassa ja laittaa mustat nuolet.



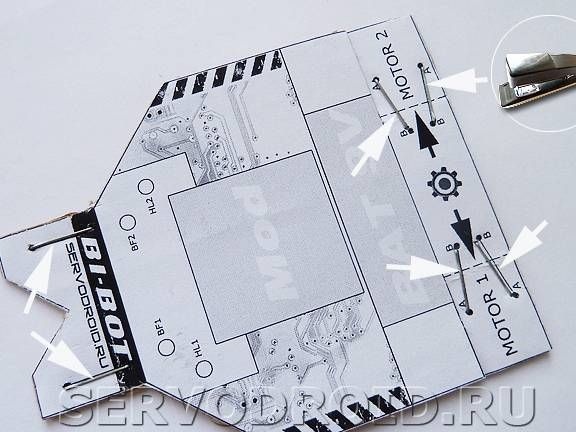


Kotelon etu- ja takaosa määritettyyn asentoon nitojalla, asenna kiinnikkeet. Niiden asennuspaikat on merkitty mustilla viivoilla ympyröillä. Nitoja tarvitaan kehyksen jäykistämiseksi. Kiinnikkeiden asentamisen jälkeen ne ovat tylsiä taipua taivutuslinjoja pitkin.
Paikoissa BF1, BF2 on tehtävä reikiä valotransistorien asentamista varten. Paikoissa HL1, HL2, sinun on tehtävä reikiä, jotka ovat kooltaan sellaisia, että ne sopivat infrapuna-LEDien kotelon halkaisijaan.
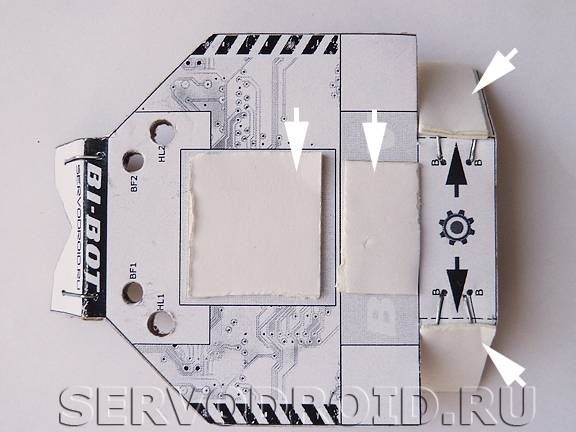
Paikoissa, jotka on merkitty Mod "," BAT 9V "ja" MOTOR 1 "," MOTOR 2 "kiinnitä kaksipuolisen nauhan nauhat.
Vaihe neljä Moottorien asennus
Moottorit on asennettu paikoilleen nylon-siteillä. Akselien liukumisen estämiseksi niitä on käytettävä suojaimilla. Ne on valmistettu kuminauhoista, jotka ovat kynien heliumitankoissa. Juota samassa vaiheessa johdot moottoreihin.


Vaihe viisi Infrapuna-LEDien asennus
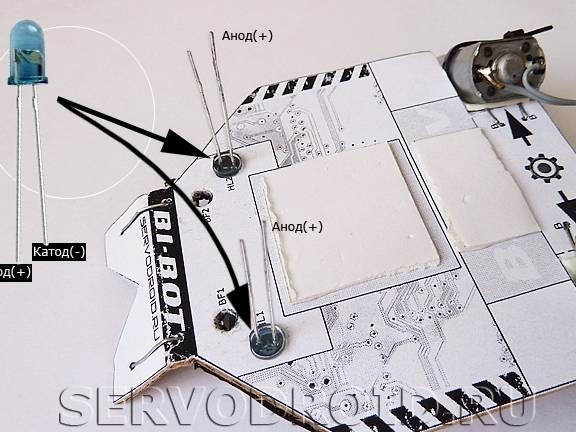
Kun asennat infrapunavaloja, on tärkeää olla sekoittamatta niiden johtopäätöksiä, tuotujen elementtien osalta pitkä kosketin on anodi, ts. Plus. LEDit asennetaan kohtiin HL1, HL2 kuvan osoittamalla tavalla. Löytöt taivutetaan siten, että diodit voidaan kytkeä rinnakkain.
430 ohmin vastus on juotettava LEDien positiiviseen koskettimeen ja musta johdin negatiiviseen koskettimeen.
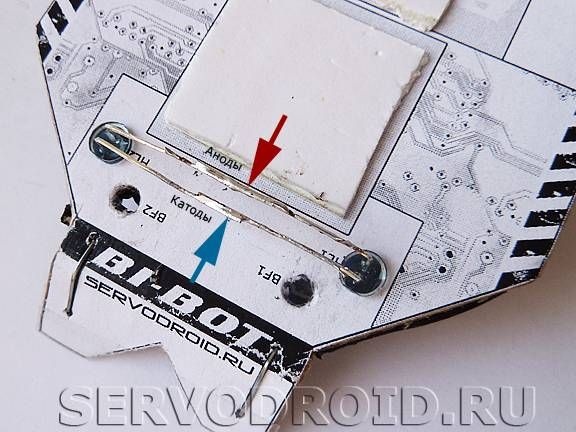
Musta johdon toinen pää on kytkettävä kolmiosaisen riviliittimen keskitappiin. Vastuksen ulostulon suhteen se on kytketty liitinriviliittimeen.
Vaihe kuusi Viimeinen rakennusvaihe
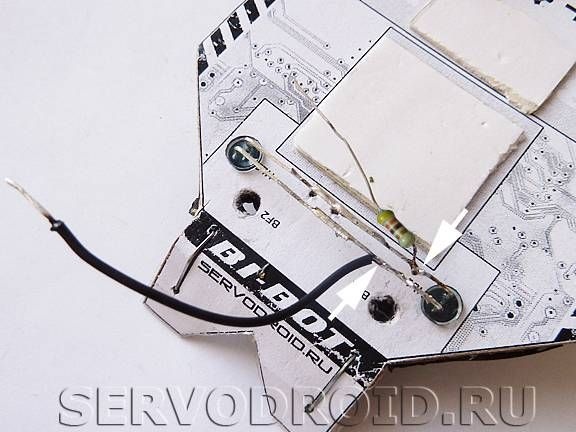
Jotta robotti voisi liikkua linjaa pitkin, fototransistorit asetetaan paikoilleen BF1, BF2 kuten kuvassa.
Valonlähteen takana liikettävät transistorit on sijoitettu takapuolelle.
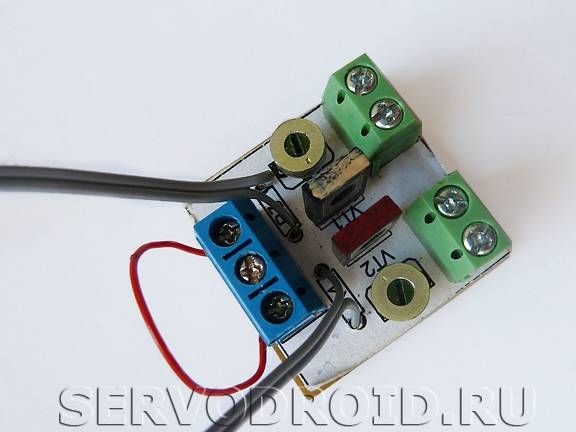
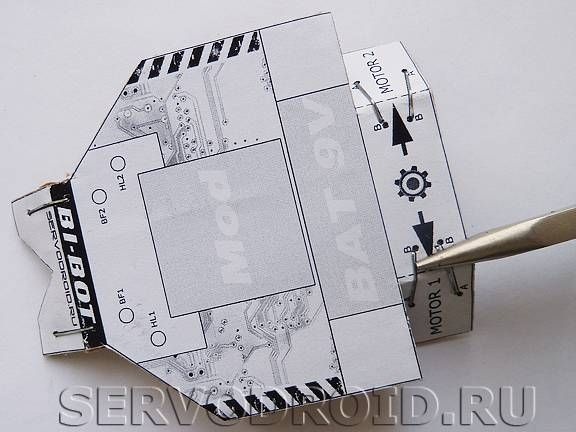
Yhteenvetona voidaan todeta, että moottorit on kytketty ja akku asetettu.

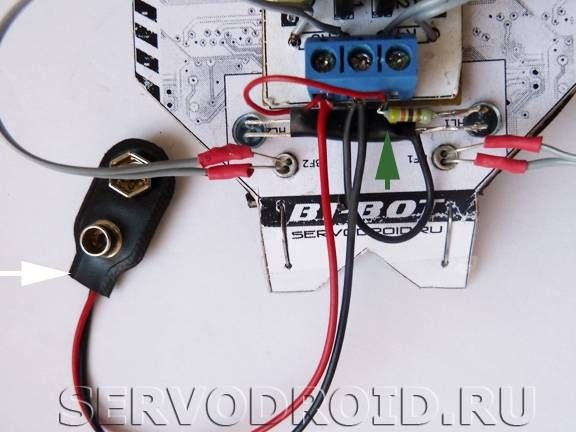

Siinä kaikki, robotti on valmis. Nyt voit yrittää kytkeä sen päälle ja määrittää sen haluttuihin olosuhteisiin.