

Videossa näet kuinka robotti toimii. Väri muuttuu vähitellen käytön aikana.

Materiaalit ja työkalut robotin kokoamiseksi:
- U-muotoiset kiinnikkeet;
- neljä 1,5 V LR44 -paristoa;
- monivärinen RGB-LED kytkentätoiminnolla;
- eristysputket;
- teräs työntötanko;
- matalajännitemoottori, tyyppi RF-300CA;
- painike robotin käynnistämiseksi (kahdella johdolla);
- johdot moottorin kytkemiseen;
- vilkkuva hälytys LED.
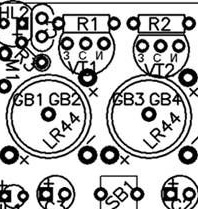

Tarvittaessa elektroninen elementtejä, ne on esitetty kuvassa. Painettu piirilevy on valmistettu piirilevystä, sen mitat ovat vain 30X30 mm. Kirjailija suosittelee myös pienten polaaristen kondensaattoreiden käyttöä kokoamiseen.
Robotin valmistusprosessi
Ensimmäinen askel. Kaavio robotista
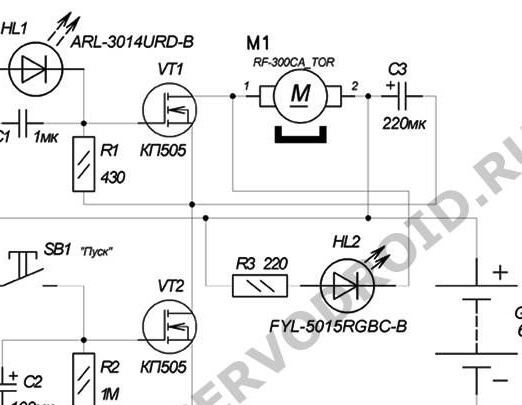
Robottipiiri näkyy kuvassa. Akun asettamisen jälkeen robotti on pois päältä -tilassa. Kytke se päälle painamalla SB1-painiketta. Heti tämän jälkeen kondensaattori C2 latautuu heti. Kondensaattorin positiivinen levy on kytketty kenttätehostetransistorin VT2 porttiin. Tässä suhteessa, kun kytkentäkynnys on saavutettu, tämän kanavan viemärilähdekanavan vastus heikkenee heti ja viemäriin muodostuu negatiivinen potentiaalinen varaus. No, mitä seuraavaksi tapahtuu, voidaan nähdä yksityiskohtaisemmin kaaviossa.
Vaihe toinen Asenna RGB LED
Numeron 1 alla oleva LED on asennettu piirilevylle. Piirustuksessa tätä sijaintia kutsutaan HL2. Kun LED on asennettu, sen johtopäätökset on taivutettava siten, että LED on suunnattu sivulle. Siten LED-valo palaa toiminnan aikana ei ylöspäin, vaan sivulle, valaiseen seiniä. Missä suunnassa valo palaa, on merkitty mustalla nuolella.

Vaihe kolme Asenna akun kiinnityskiinnikkeet
Akun ja robotin välisen kontaktin aikaansaamiseksi käytetään nastatappeja.Yksi painike on asennettu keskelle, kaaviossa se on merkitty GB1, GB2 ja toinen on asetettu asentoon GB3, GB4. Koskettimien kiinnittämiseksi turvallisesti painikkeet juotetaan suurella määrällä juotosta.


Paristot on asennettu metallinappiin numeron 3 alla. Paristot on kiinnitetty U-muotoisella kiinnittimellä, johon putkien eristimet ovat kuluneet. Kannattimen yläosa täytyy olla hieman taivutettu kaari alaspäin, jolloin paristot voidaan painaa alakontaktiin. Eristysputkia tarvitaan, jotta paristojen pystypinnat eivät ole kosketuksissa vaakasuorien kanssa.
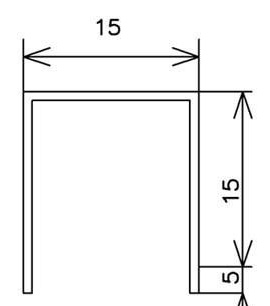
U-muotoisen kiinnittimen valmistamiseksi on käytettävä kahta paperiliitintä. Ne täytyy taivuttaa U-muotoon, kuten piirustuksessa on osoitettu. Mitä tahansa putkia voidaan käyttää, tässä käytetään polyvinyylikloridia. Niiden korkeuden tulisi olla yhtä suuri kuin paristojen korkeus.
Asenna kannatin juottamalla, sillä sen päät täytyy sitten harjata. Tinaukseen on käytettävä neutraalia, ei-pesuainetta.
Vaihe neljä Asenna moottori
Moottori on asennettu levyn sille puolelle, josta telat kulkevat, se sijaitsee akselin ollessa alaspäin. Kiinnitä moottori käyttämällä kuumaa liimaa tai kaksipuolista teippiä. Ennen kuin asennat moottorin tiukasti, sinun on kytkettävä se ja tarkistettava koko järjestelmän toiminta.

Vaihe viisi Asennus ja testaus kotitekoinen
Kun robotti on koottu, voit testata ja konfiguroida. Tätä varten sinun on asennettava paristot robottiin, ne on asennettu GB1: n, GB2: n ja GB3: n, GB4: n sijasta. Tässä tapauksessa elektroniikan on oltava pois päältä-tilassa. Paristojen asentamisen jälkeen robotti voidaan kytkeä päälle, tämä tehdään SB1-painikkeella. Kun se on painettu, moottorin pitäisi alkaa toimia, HL1-merkkivalo vilkkuu ja myös RGB-merkkivalo syttyy.
Jonkin ajan kuluttua robotti sammuu automaattisesti, se pysähtyy ja kaikki diodit sammuvat. Se kytketään sitten päälle samalla tavalla kuin ensimmäistä kertaa painikkeella.

Robottin ajan säätämiseksi sinun on kokeiltava vastuksen R2 ja kondensaattorin C2 arvoja, jotka vastaavat tästä toiminnosta. Jos joudut asettamaan robotin maksimaalisen toiminnan, kondensaattorin kapasitanssin tulisi olla mahdollisimman suuri. Niin yksinkertaisella tavalla voit koota niin mielenkiintoisen robotin.