
Tämä robotti ohjataan bluetooth-älypuhelimella. Älypuhelimen kiihtyvyysanturi mittaa puhelimen kulman vasemmalle / oikealle, ylös / alas, käyttää tätä tietoa suunnattujen moottoreiden nopeuden laskemiseen, tiedot siirretään Bluetoothin kautta Työläs
Mitä tarvitset robotin rakentamiseen.
Arduino uno, HC-06 Bluetooth-moduuli, kaksi 300 RPM 12v vaihdemoottoria, H-bridge L298N Dual H Bridge moottorin ohjain
12 - 1,3 A lyijyhappoparisto. Jokainen moottori kuluttaa 0,4 A, plus kuljettajan logiikan kulutus. Arduino-johdot, tavalliset 9v-paristot ja liitin akun kytkemiseen Arduino-liittimeen. Sähköjohdot sähkömoottoriohjaimien kytkemiseen. USB-kaapeli. Puhelin Android-version 4 tai uudemman kanssa. 4 kääntyvää 50 mm: n kumipyörää Screwfixistä tai Toolstationista; kaksi Lynxmotion HUB-02 -napakeskipintaa.










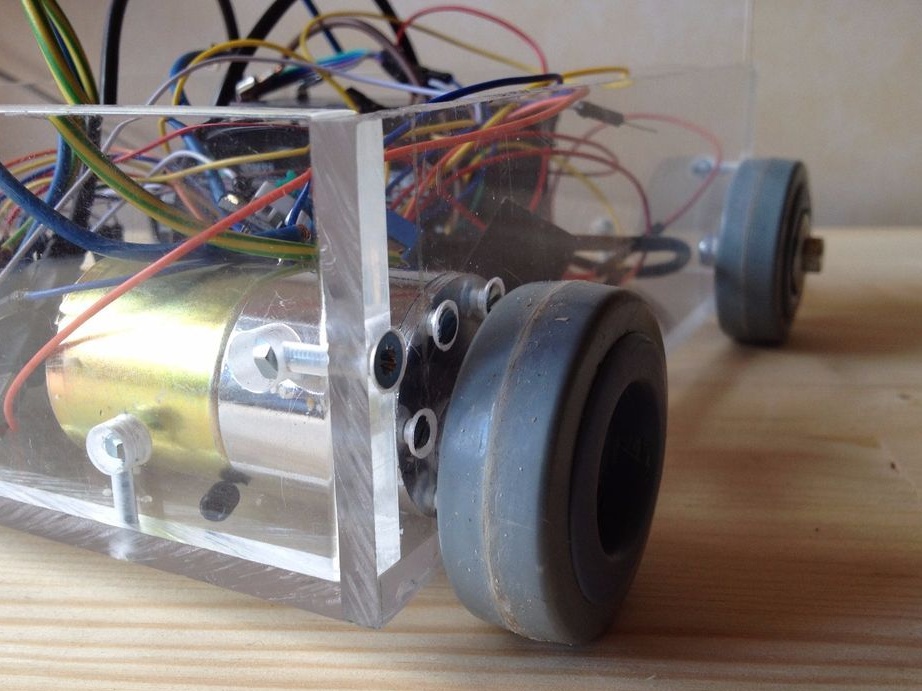
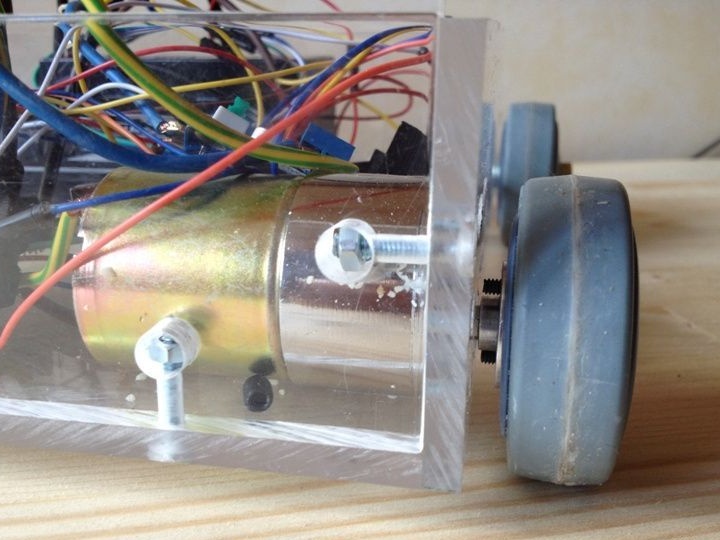
Kotelo on koottu 22 cm pitkästä ja 17 cm leveästä muovista. Kaksi moottoria on kytkettävä akseliin ja kiinnitettävä kierretapilla.
Etupyörät
Kumi poistetaan teloista ja niihin porataan kaksi reikää napojen reikien mukaisesti. Navat on kiinnitetty kotelon läpi kulkeviin akseleihin kierteillä. Tämän jälkeen telat kiinnitetään napoihin ja niihin laitetaan kumi.
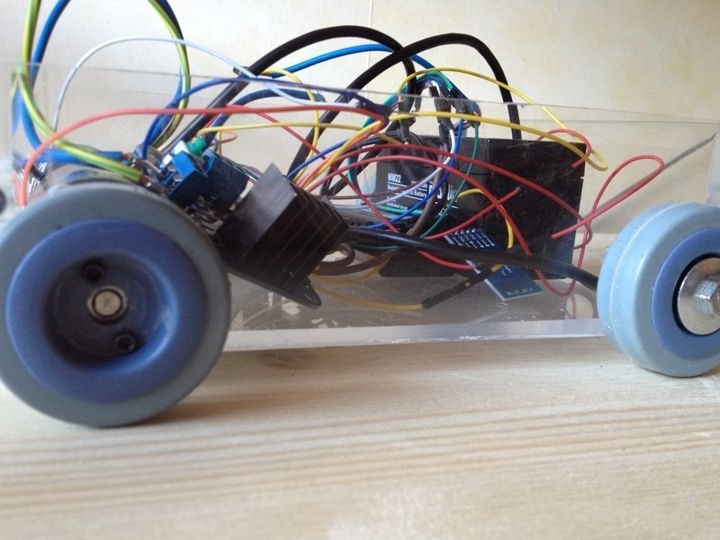
Takapyörät
Takapyörät on yksinkertaisesti avattu saranasta ja kiinnitetty koteloon porattuihin reikiin.
Sähköliitännät.
Ohjelmakoodin lataamisessa Arduinoon tulee ongelmia. Tämä johtuu siitä, että Bluetooth-moduuli, sen RX \ TX-kontaktit, on kytketty Arduino-nastaihin 1 ja 2, joita käytetään myös tiedonsiirtoon USB: n kautta. Liitetyssä kirjastossa olevat kontaktit 1 ja 2 on muutettava 11: ksi ja 12: ksi, joita käytetään tiedonsiirtoon.
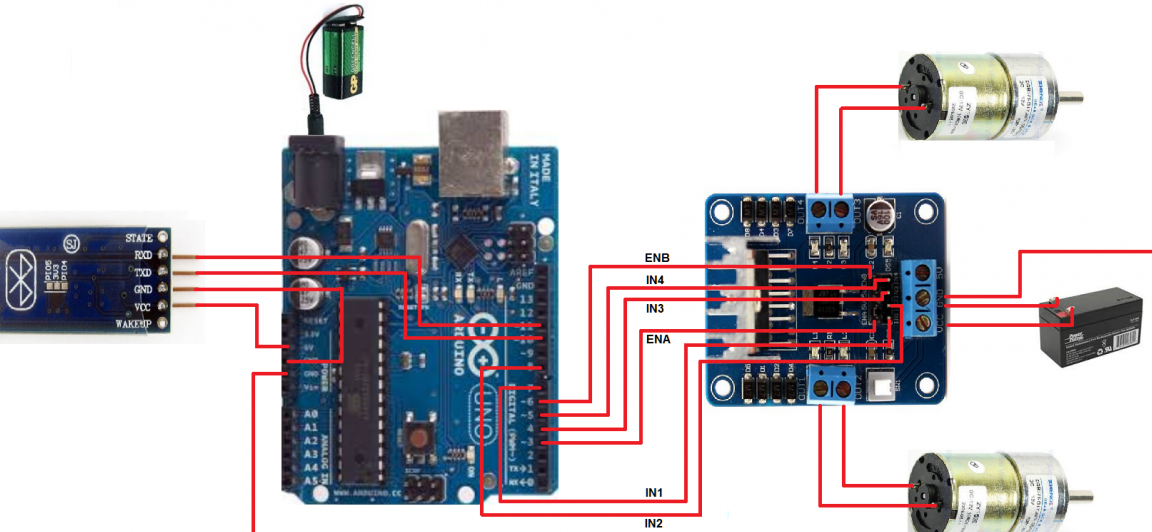
Moottorinkuljettaja ei tarvitse erillistä virtalähdettä logiikkaan. 12 V riittää ohjaamaan kuljettajan logiikkaa ja itse moottoria. Akun miinus tulee kytkeä sekä Arduinoon että moottoriohjaimeen. ECA / 5V ja ENB / 5V moottoriohjaimen koskettimet voidaan siirtää. Se on poistettava ennen yhteyden muodostamista Arduinoon. Mitään ei tulisi kytkeä kahteen 5 V: n nastaan.
Android-koodi.
Liitetty tiedosto on purettava ja tuotava Android Studioan, pakattava se apk: iin ja asennettava puhelimeen.
Avaintiedostot:
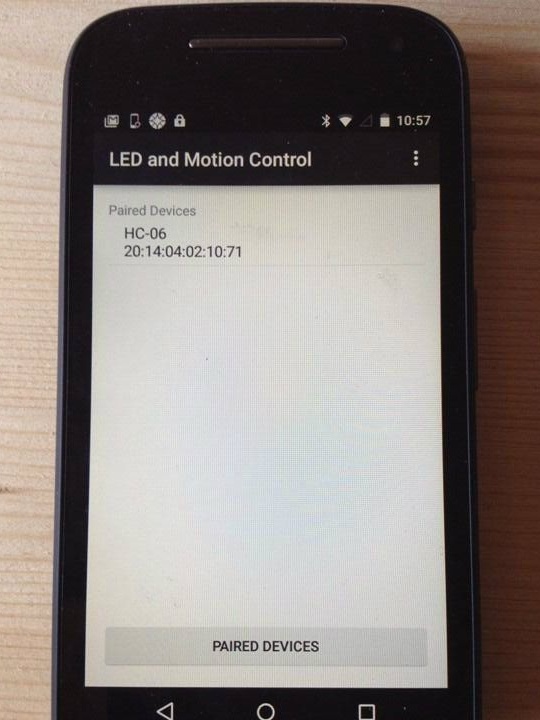
Parillisten laitteiden toiminta:
deviceList.java
activity_device_list.xml
LED- ja liikkeenohjaus:
ledControl.java
activity_led_control.xml
Luettelo:
AndroidManifest.xml
Pari-laitetoiminto näyttää käytettävissä olevat Bluetooth-laitteet. Heti kun laitteet on kytketty, ohjaus siirretään LEDiin ja liikkeenohjaustoimintoon.
Päälle / pois-painikkeet lähettävät “päälle” tai “pois” viestin Arduinolle kytkemällä sisäänrakennetun LEDin päälle tai pois päältä. Puhelimen kiihtyvyysanturi, joka lähettää x / y-arvot anturilta, aina kun nämä arvot muuttuvat, ohjaa liikettä. Tämän perusteella Arduino laskee moottorien nopeuden ja pyörimissuunnan välillä 0 - 255. Se välittää nämä Arduino-arvot muodossa 'L-255:' tai 'R100' jne. Tämän perusteella Arduino lähettää vasemman moottorin pyörimisnopeuden komennot ENA: lle, oikea komennon ENB: lle ja muuttaa pyörimissuuntaa muuttamalla napaisuudeksi IN1, IN2 vasemmalle, N3 ja N4 oikealle moottorille.