


Hyvää iltapäivää, tänään haluan jakaa ohjeet säiliön valmistamisesta. Sisäiselle ohjaimelle on kaksi vaihtoehtoa: ESP -8266 ja Työläs Pro Mini. Ensimmäisessä versiossa ohjaus tapahtuu Wi-Fi-yhteyksien kautta. Toisessa - IR-kaukosäädin. Valmistettu TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35) pohjalta, sitä ohjaa Tamiya 70097 Twin-Motor vaihdelaatikkosarja ja vaihdelaatikon mukana toimitetut moottorit.
Tarvitsemme:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- malliliima (esimerkiksi TAMIYA-sementti)
- Tamiya 70097 kaksimoottorinen vaihdelaatikkosarja
- ESP 8266 -12E tai Arduino Pro Mini 8MHz 3,3 V
- jännitteenvakaaja AMS 1117 3,3v 8000mA (jos saatavana lisävarusteena ESP 8266-12E)
- Qifei L9110 -moottorin kuljettaja
- kondensaattori 10v 1000uF
- kaksivärinen (punainen, vihreä) LED
- sininen LED
- 2 punaista LEDiä
- IR-vastaanotin
- valoresistori
- 2 lokeroa 2 AAA-paristolle tai 4 AAA 1.2V 1000mA NI-MN -paristolle
- 2 vastusta 2ohm
- 4 vastukset 75 ohmia
- 6 vastusta 10 kOhm (jos lisävarusteena ESP 8266-12E)
- painike
- valoresistori
- USB - TTL
- juotosrauta
- moniväriset johdot
Vaihe 1 Asuminen ja mekaniikka.
Ensin sinun täytyy kerätä malli TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Liimaamme alaosan ohjeiden mukaan, lukuun ottamatta osia, jotka peittävät vaihdelaatikoiden poistoaukot. Myös johtavat tähdet eivät tartu kiinni. Liimaa yläosa ohjeiden mukaan ilman muutoksia. Kun tämä on liimattu, anna kuivua ja siirry vaihdelaatikon keräämiseen. Kuten ohjeista voidaan nähdä, Tamiya 70097 voidaan koota kahteen eri versioon.
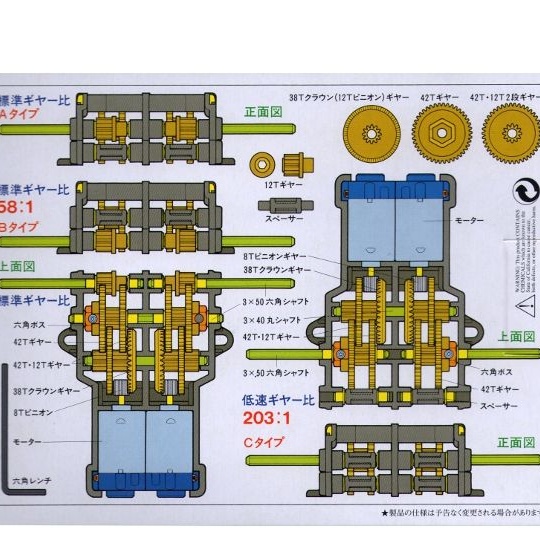
Ensimmäinen vaihtoehto välityssuhteella 58: 1, toinen - 203: 1. Tarvitsemme ensimmäisen vaihtoehdon. Ja täällä ei myöskään ole niin yksinkertaista. Tässä tapauksessa akselin lähtö voi olla lähempänä vaihdelaatikon pohjaa tai keskellä. Akselit on hengitettävä keskireikään! Asennettuaan vaihdelaatikon jatkamme sen asentamista malliin. Teoriassa kaiken pitäisi olla yksinkertaista, koska sekä yrityksen malli että vaihdelaatikko. Käytännössä - vaihdelaatikko oli työnnettävä sinne. Vaihteiston vaakasuorassa asennossa vetopyörien akselit kiertyivät ylöspäin, joten jouduin leikkaamaan metallilevyn, joka mahdollisti vaihdelaatikon kiinnittämisen haluttuun asentoon.

Vaihteiston akselit on leikattava 3 mm. Liimaa sitten vetopyörät niihin.

Yläosassa, lähempänä takaosaa, teemme reikiä kaksiväriselle LEDille ja IR-vastaanottimelle.

Edessä on reikä siniselle LEDille, joka toimii taskulampuna.

Ja luukun sisäpuolella - valoresistorille.

Liimaa takapuolelle punaiset LEDit valaistusta varten.

Kaikiksi edellä esitetyiksi johdot on juotettava. On helpompaa tehdä tämä ennen asennusta.
Vaihe 2 Sähköasentaja
Tässä esitän valikoiman vaihtoehtoja kokoonpanoa varten.
Jos olet valinnut ESP 8266. Sisäänrakennettu Wi-Fi-moduuli helpottaa huomattavasti hallintaa ja yhteyden muodostamista.Se voidaan ohjelmoida helposti Arduino IDE: hen. Paras on valita moduuli, jossa on 4 Mt muistia. Tässä tapauksessa on välttämätöntä kerätä vähimmäisvaljaat ESP-8266: n käynnistämistä ja vilkkumista varten. Vain VCC-nasta on kytketty suoraan virtalähteeseen, loput nastat: CH_PD, RESET, GPIO0, GPIO2, on vedettävä virtalähteeseen (VCC) vastuksen kautta. 10kOm-vastukset voidaan korvata muilla, välillä 4,7kOm - 50kOm, paitsi GPIO15 - sen arvon on oltava jopa 10k. Suoraan, virtalähteen miinus (GND), liitämme vain GND: n ja vedämme myös GPIOO: n vastuksen kautta 10kOm: iin, jotta moduuli asetetaan laiteohjelmiston lataustilaan, GND: hen. Painiketta tarvitaan moduulin käynnistämiseen ja vilkkumiseen. USB-TTL-liitin - laiteohjelmistoa varten.
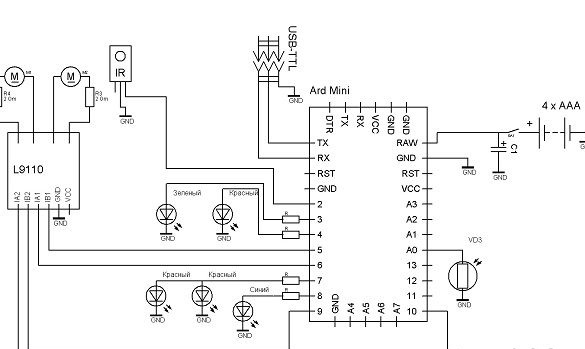
Tässä on kaavio
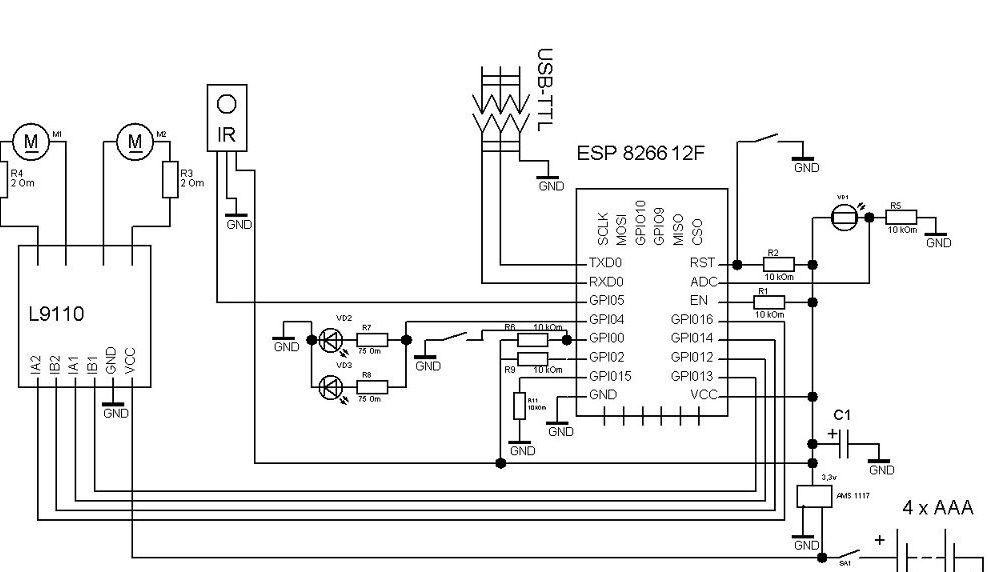
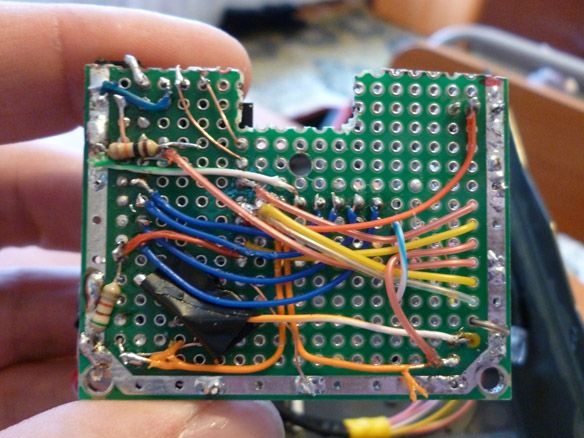
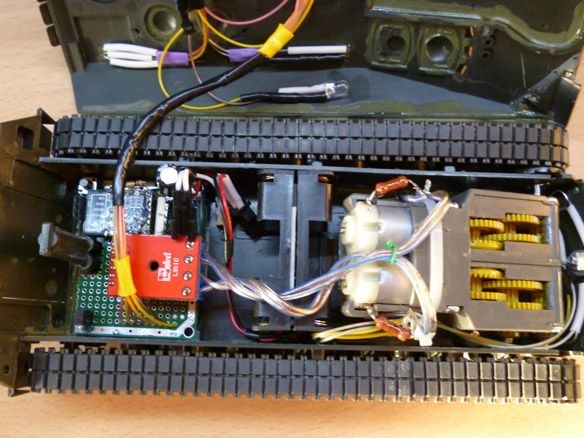
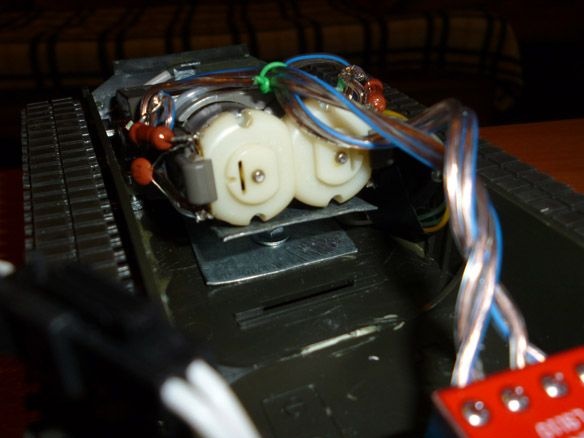
Selitän vähän, sinistä ja kahta punaista LEDiä tarvitaan taustavalaistukseen (se on näkyvä ja kaunis pimeässä), fotoresistori on kytketty ohjaimen ADC: hen ja sitä tarvitaan valaistuksen määrittämiseen (kun taustavalo muuttuu tummaksi). 10 kOhm vetovastukset, 75 ohmia LED-merkkivaloille, 2 ohmin virranrajoitin moottoreille (ilman niitä, kun yritetään liikkua, ohjain on ylikuormitettu). Juottamme kaiken piirilevyn piirin mukaan. Virtalähteessä voit käyttää 4 "vähän" paristoa tai neljä AAA-kokoista paristoa, juotettu sarjaan. Liimaamme kahden pariston kaksi osastoa kaksipuolisella teipillä ja liitämme sarjaan. Sekä paristokotelot että akut on sijoitettu vaihdelaatikon ja piirilevyn väliin.

Jos valintasi putosi Arduinolle. Vain Arduino Pro MINI sopii sisälle. Kannattaa valita 3,3 voltin levy, koska moottorit on suunniteltu 3 voltin etäisyydelle, etkä halua antaa moottoreille ja Arduinolle erillistä virtaa. Arduino on helpompaa. Koko ohjaimen johtosarja ja jännitesäädin ovat jo itse levyllä. Jää jäljellä Arduino-pistorasian ja moottorin ohjaimen irrottaminen piirilevyltä.

Vaihe 3 Ohjelmointiympäristön valmistelu.
Voit muokata laiteohjelmistoa ja täyttää luonnos ESP: ssä asentamalla Arduino IDE: n Arduino.cc: n viralliselta sivustolta ja asentamalla ESP-lisäosan Boards Manager -sovelluksen kautta. Käynnistä Arduino IDE valitsemalla Tiedosto - Asetukset - Lisää Boards Manager URL -kenttään -linkki.
http://arduino.esp8266.com/package_esp8266com_index.jsonnapsauta OK (tähän kenttään voit kirjoittaa useita pilkuilla erotettuja linkkejä). Seuraava työkalu - Board - Boards Manager, kirjoita esp8266 suodatinkenttään ja napsauta ESP8266, yhteisön foorumi ESP8266. Napsauta Asenna ja odota latauksen päättymistä. Nyt on valittava Board - Generic ESP8266 Työkalut-valikossa ja asetettava moduulin taajuudeksi 80 tai 160MHz, flash-muistin koko ja valittava sarjaportti, johon USB-TTL-sovitin on kytketty.
Arduino: asenna vain Arduino IDE viralliselta Arduino.cc-sivustolta.
Vaihe 4 Laiteohjelmisto
Jäljellä on luonnoksen muokkaaminen ja sen täyttö ESP: llä.
Kenttä "String _ssid =" ";" lainausmerkkien välillä ilmaisee, mihin tukiasemaan haluat muodostaa yhteyden.
"String _password =" ";" on tämän verkon salasana.
"String _ssidAP =" Mardella ";" verkon nimi, jonka ESP nostaa, jos se ei muodosta yhteyttä olemassa olevaan.
"Merkkijono _passwordAP =" 12345678 ";" - verkon salasana, jonka ESP kerää, jos se ei muodosta yhteyttä nykyiseen.
"String SSDP_Name =" Mardella ";" SSDP-nimi
Käynnistyksen jälkeen ESP yrittää muodostaa yhteyden luonnoksessa määritettyyn tukiasemaan. Jos onnistut, sinun on määritettävä robotimme IP-osoite ja muodostettava yhteys tähän osoitteeseen selaimen kautta. Voit myös siirtyä tietokoneen kautta verkkoinfrastruktuuriin, löytää säiliömme sieltä ja kaksoisnapsauttaa sitä muodostaaksesi yhteyden siihen. Jos yhteys epäonnistuu, ESP: stä tulee yhteyspiste. Sitten käyttöoikeus voidaan saada yhdistämällä uuteen tukiasemaan ja kirjoittamalla selaimeen 192.168.1.1.
Verkkokäyttöliittymä koostuu kahdesta sivusta. Ensimmäinen, joka hallitsi. Toinen on räätälöintiä varten. Toisella sivulla voit määrittää tukiaseman, johon haluat muodostaa yhteyden, samoin kuin säiliön nimen ja sen tukiaseman nimen ja salasanan, jonka ESP nostaa. Kaikki muutokset tulevat voimaan uudelleenkäynnistyksen jälkeen. Voit myös käynnistää moduulin uudelleen verkkoliittymän kautta.
Arduinon osalta sinun on muokattava kaikkia “results.value” -kenttiä. Kirjoittanut muistiin kauko-ohjaimen IR-koodit, joita aiot käyttää siellä.

Video tanchika: