
Tulostimen työtila on 10x10x10 cm ja nopeus 20 mm / s.
Materiaalit ja työkalut valmistukseen:
- yksi hallitus Arduino Mega 2560 + Ramps 1.4;
- 4 askelmoottoriohjainta (A4988);
- 4 tyyppistä 28byj-48 askelmoottoria;
- 3 rajakytkintä (optinen);
- askelmoottori tyyppi Nema 17;
- suulakepuristimen tyyppi E3D-V5 Aliexpress (tai kalliimpi E3D-V6 Aliexpress);
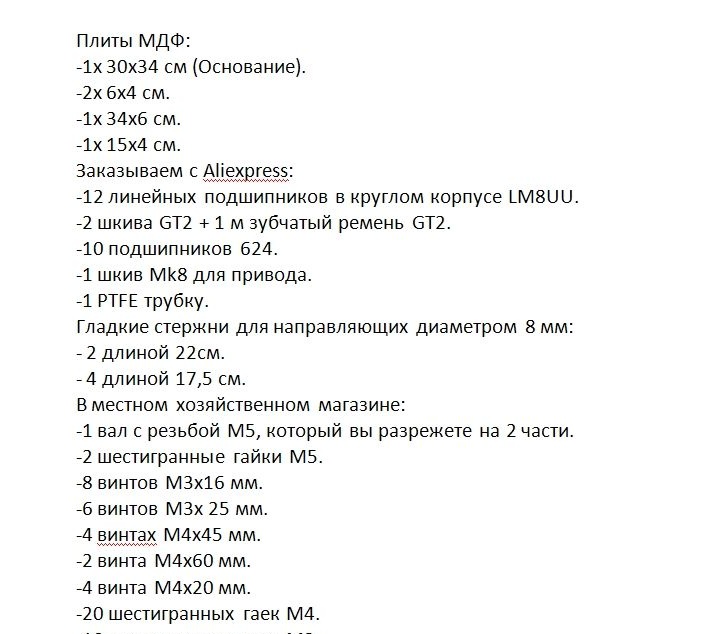
Tarvitaan myös erikokoisia MDF-levyjä, laakereita ja muita elementtejä.





Asennusta varten joudut myös tulostamaan useita elementtejä 3D-tulostimeen. Lisäksi tarvitset ruuvimeisselit, jakoavaimet ja muut työkalut.





Rakennusprosessi:
Ensimmäinen askel. Askelmoottorin uusinta
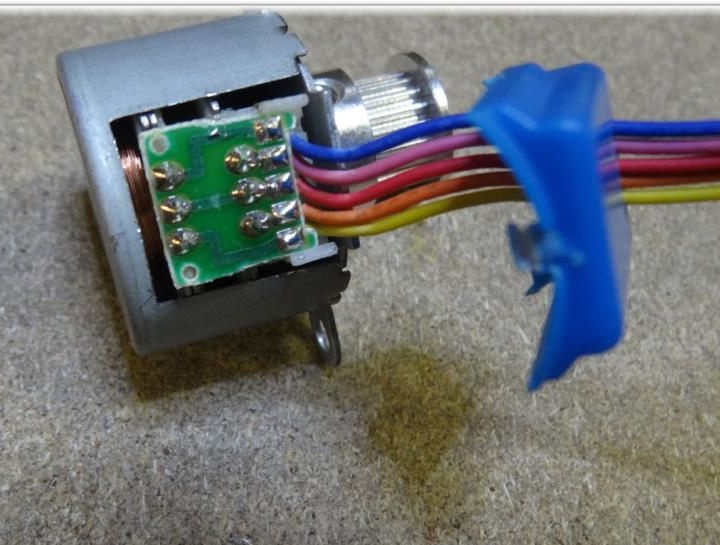
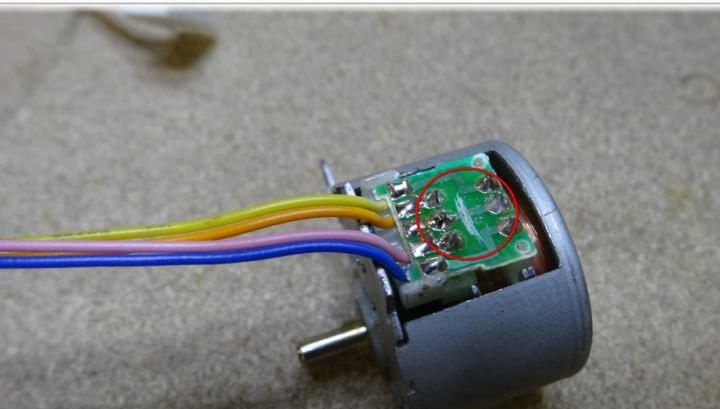
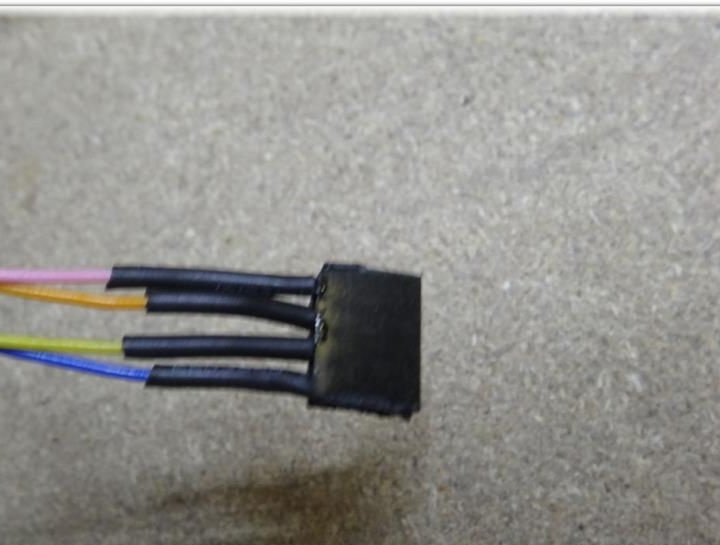
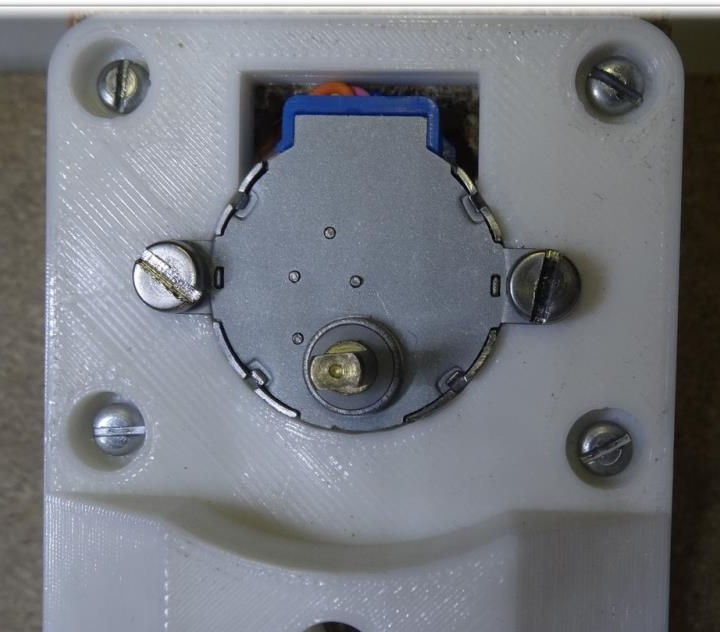
Yksipolaarisen askelmoottori on muutettava bipolaariseksi. Voit tehdä tämän 28BYJ-48-moottorissa avaamalla muovikannen. Seuraavaksi sinun on löydettävä punainen kaapeli ja irrotettava se ja avattava yhteysrata. Kuinka voit tehdä tämän, miten se tehdään.
Koskettimet tulisi järjestää seuraavasti: sininen -> keltainen -> oranssi -> vaaleanpunainen.
Tämän muunnoksen jälkeen moottori voidaan kytkeä suoraan Arduino Ramps 1.4 -kontakteihin.
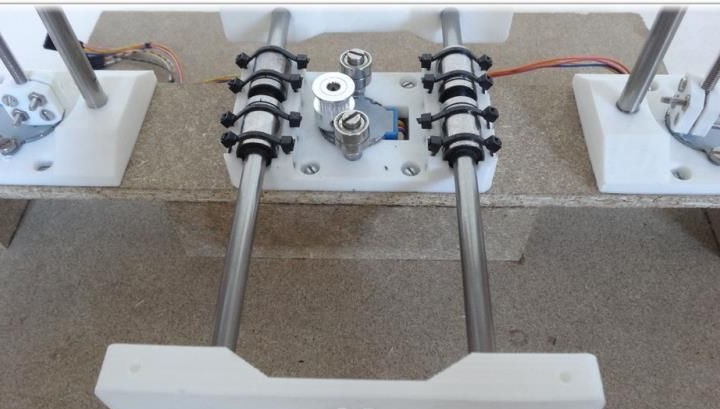
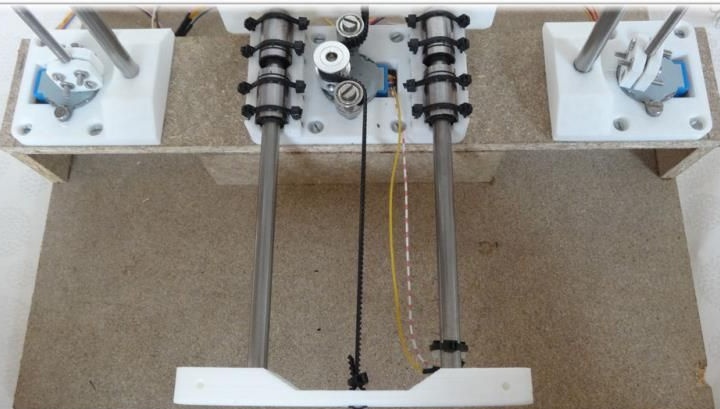
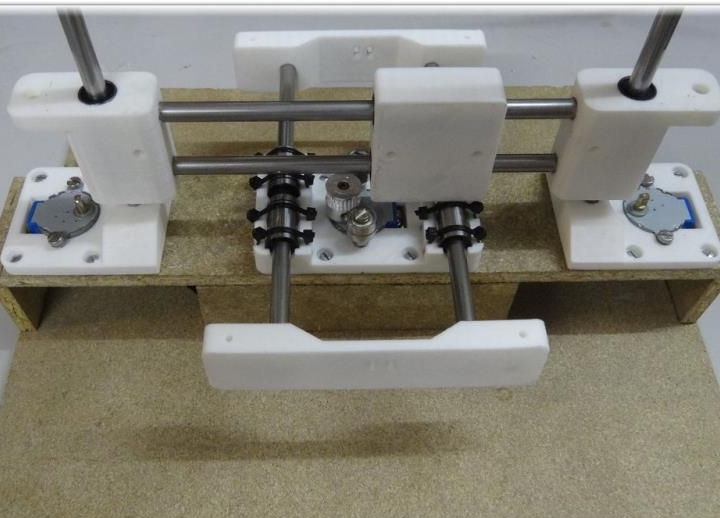
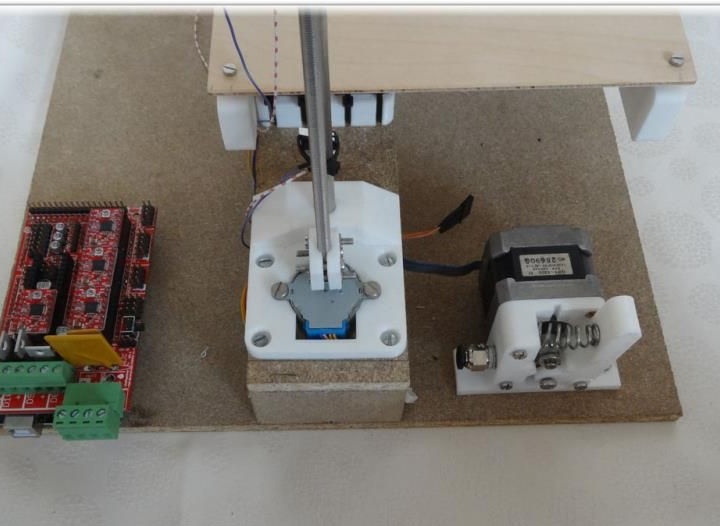
Vaihe toinen Y-akselin laite
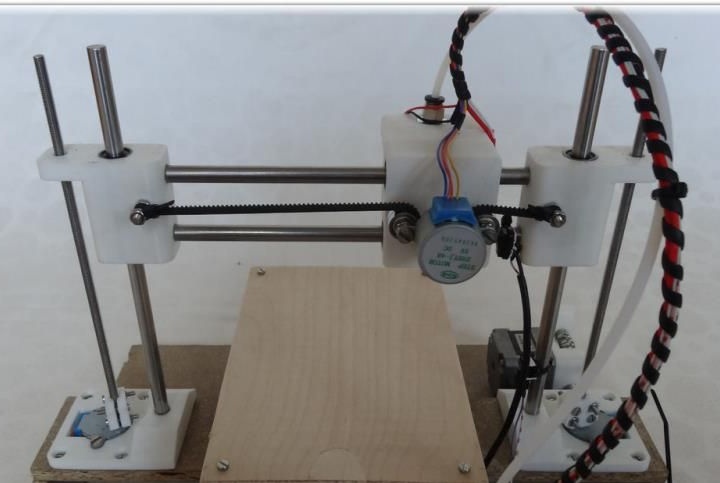
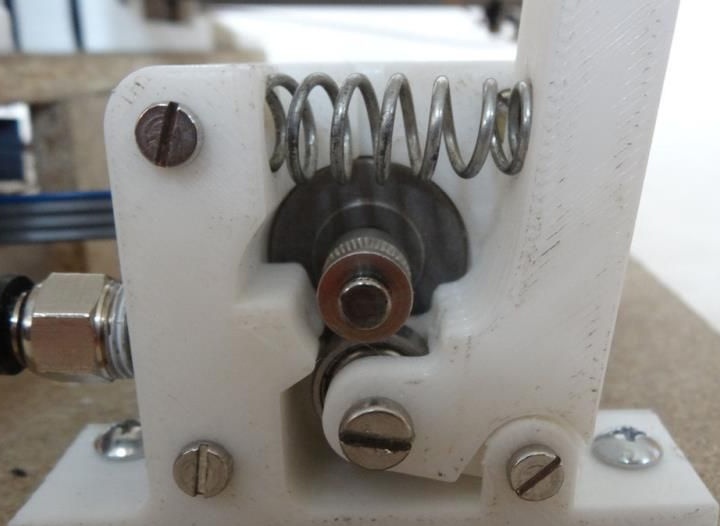
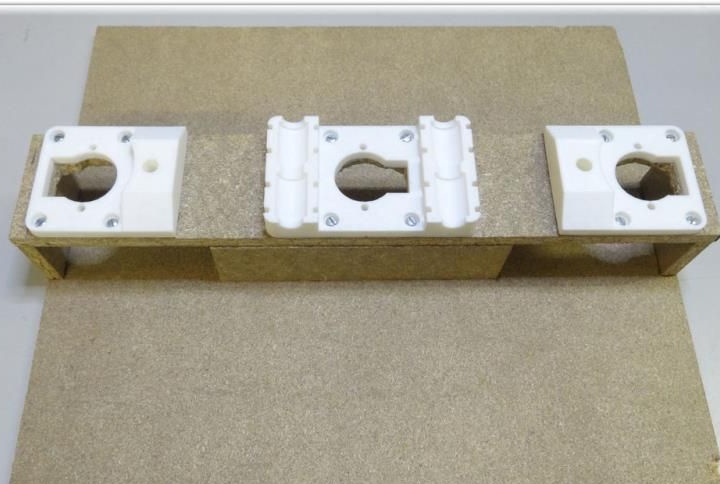
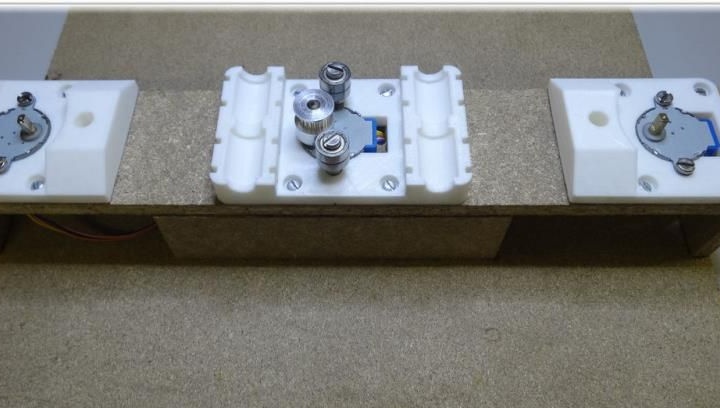
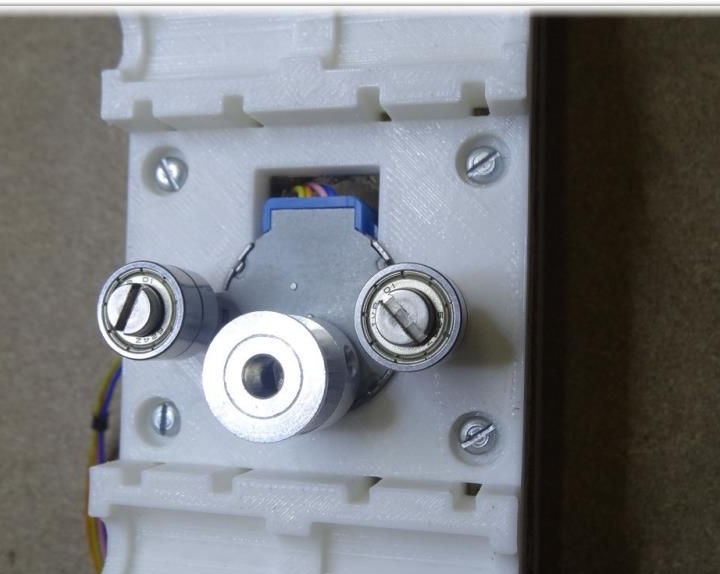
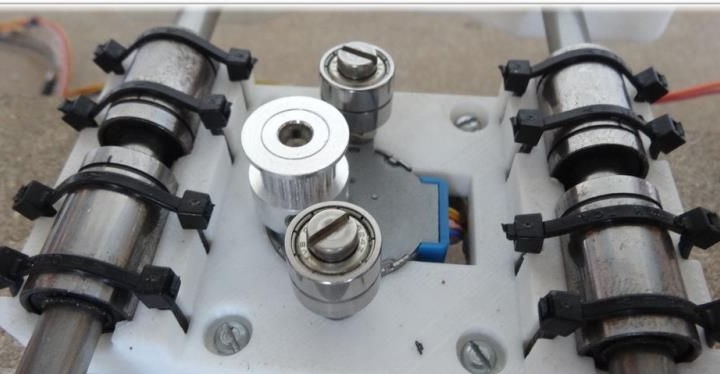
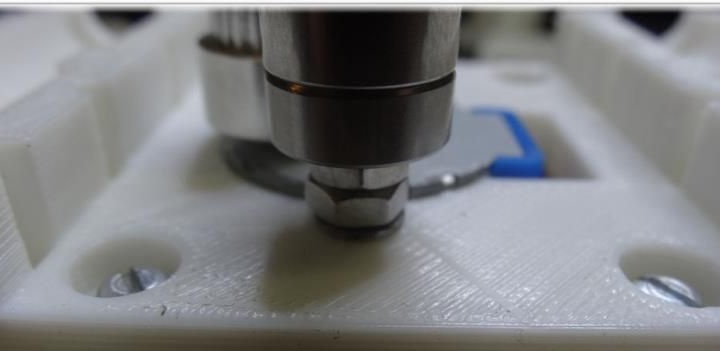
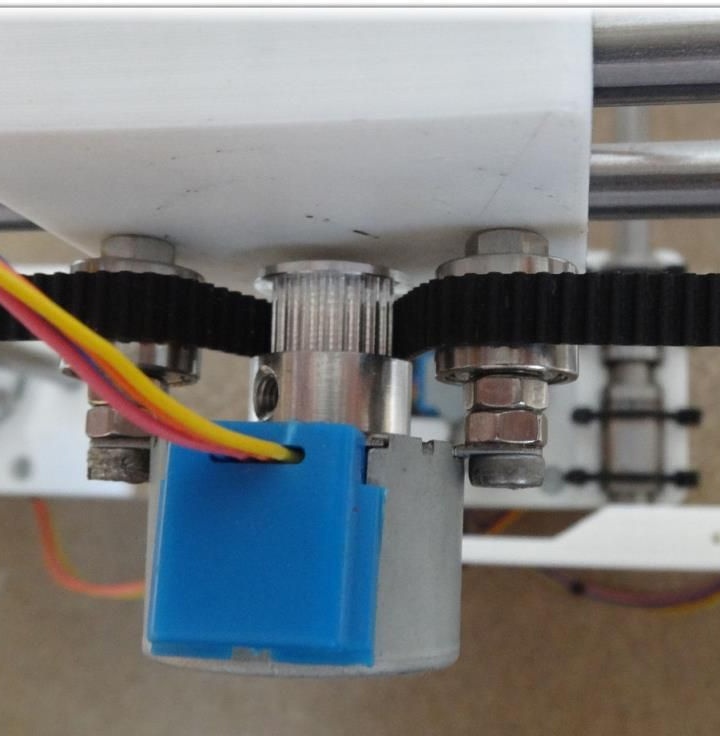
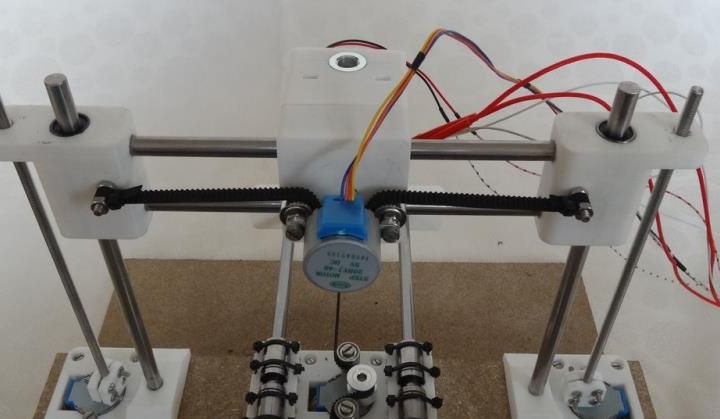
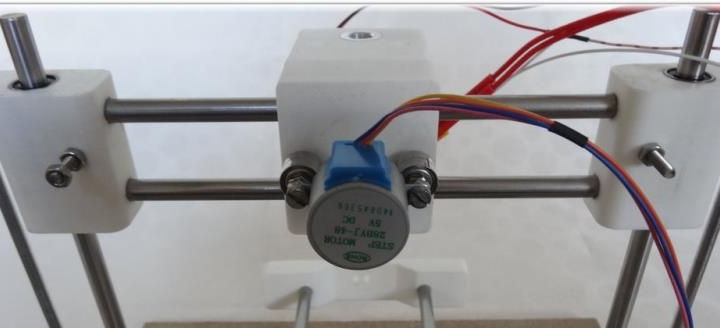
Y-akselin luomiseksi sinun on ensin liimattava kaksi levyä. Sen jälkeen painetut “Motor” ja “Z-Motor” elementit asennetaan valmistettuun alustaan. Elementit kiinnitetään levyihin ruuveilla. Seuraavaksi sinun on asennettava moottorit uriin ja sitten LM8UU-tyyppiset laakerit. Hihnapyörä on asennettu moottoriin, ja sen vieressä on 624zz-tyyppinen laakeri. Kiinnitä LM8UU-laakerit muovisilla kiinnikkeillä.
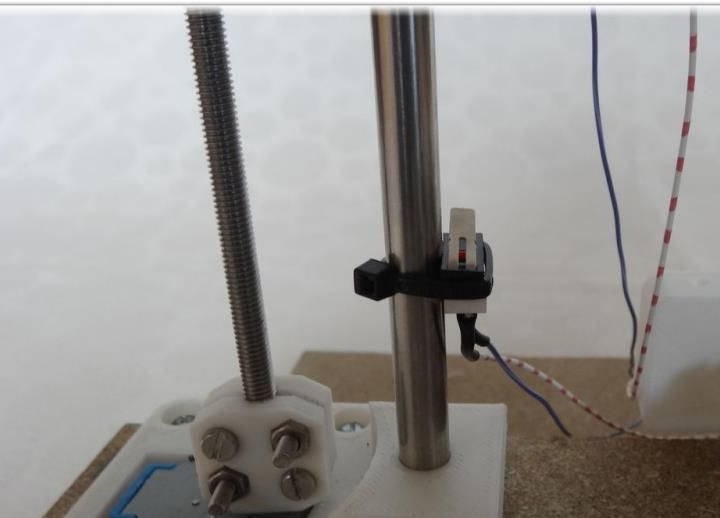
Nyt voit asentaa ohjaimet, joiden pituus on 17,5 cm ja paksuus 8 mm.
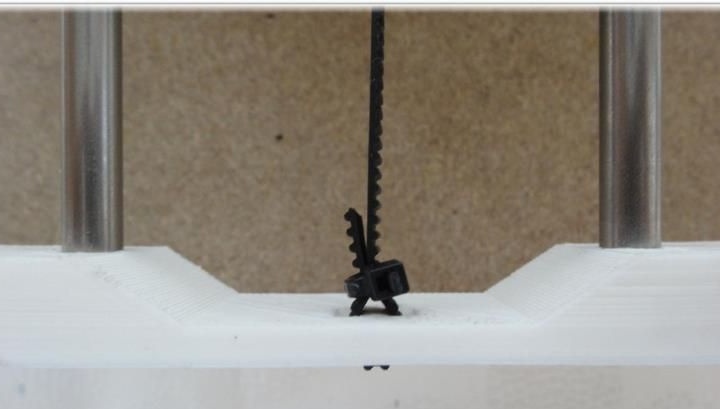
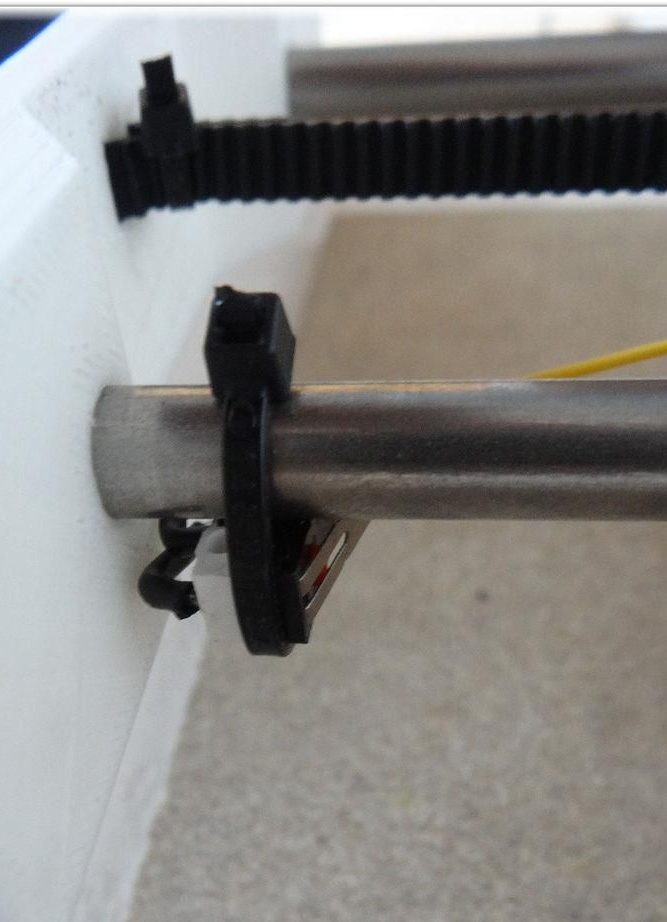
Lopuksi hihna vedetään Y-päiden läpi ja rajakytkin asennetaan.



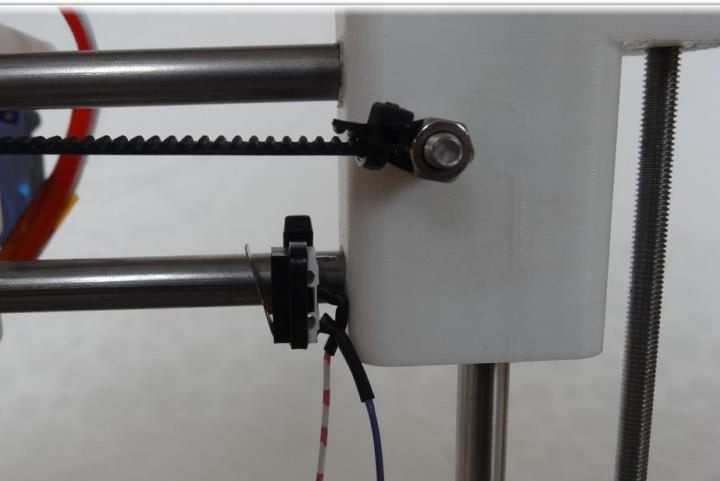
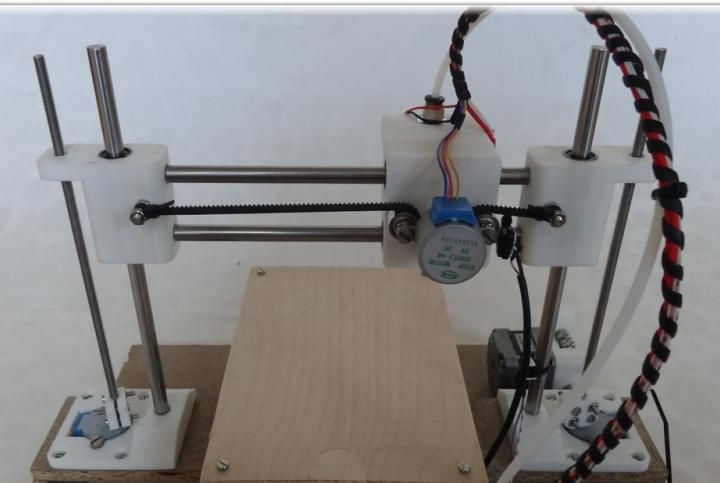
Vaihe kolme Luo X-akseli
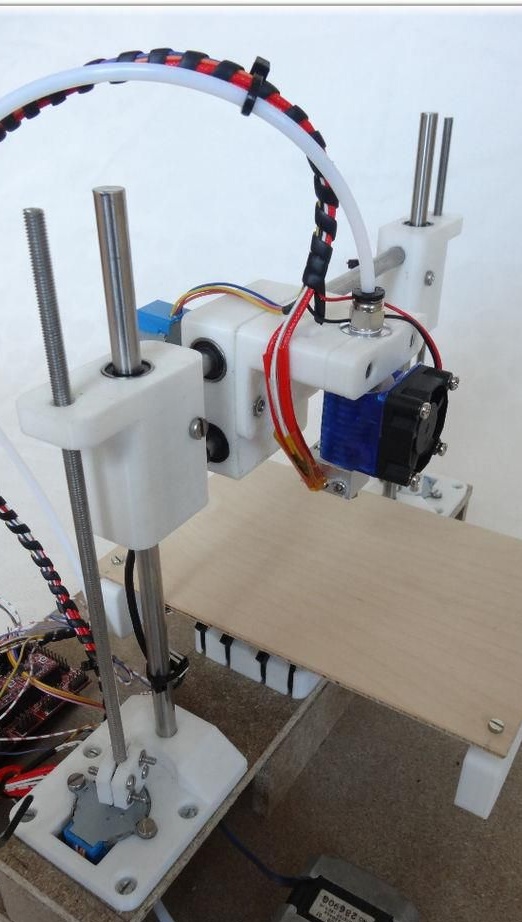
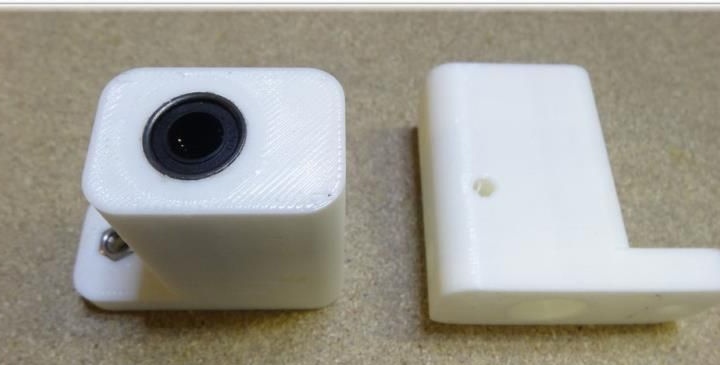
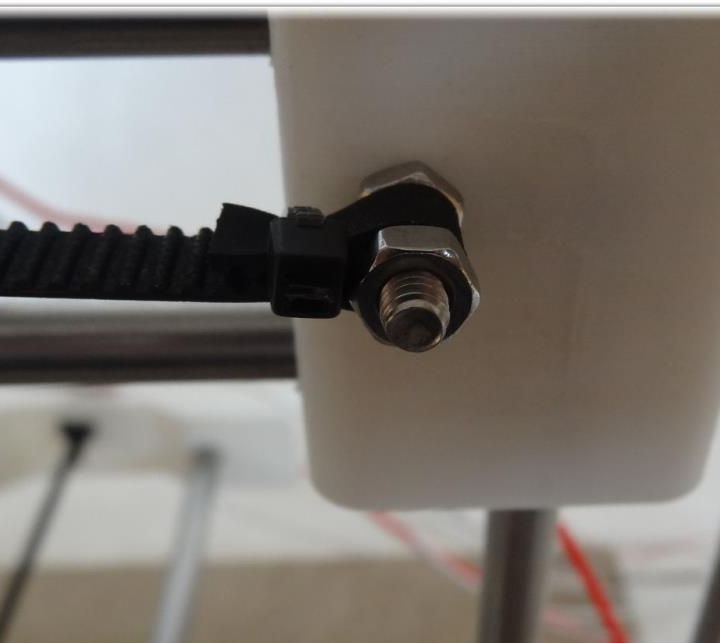
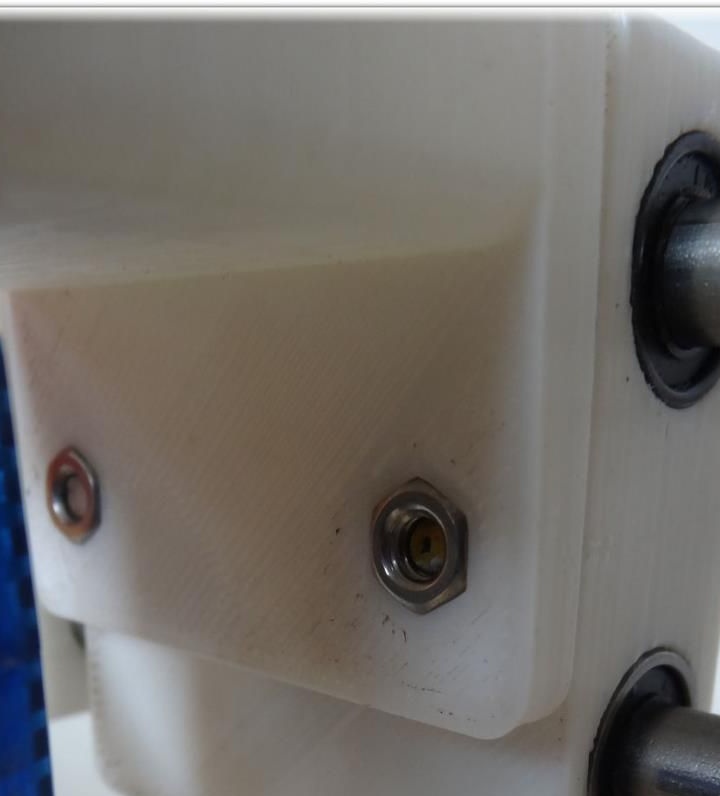
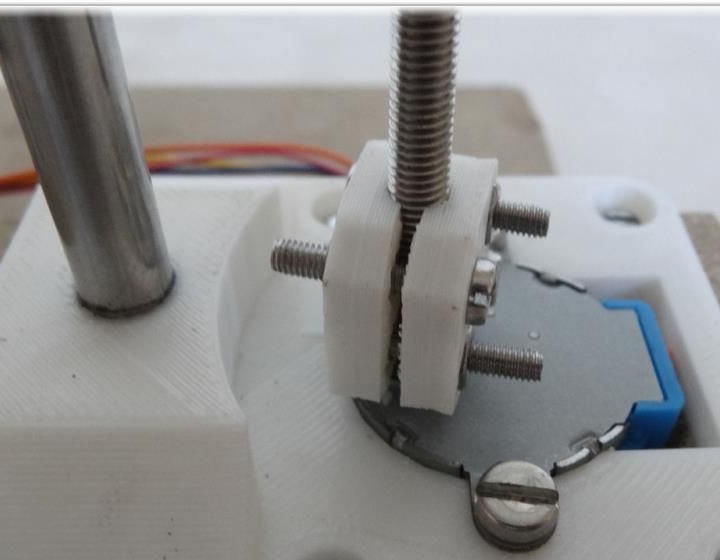
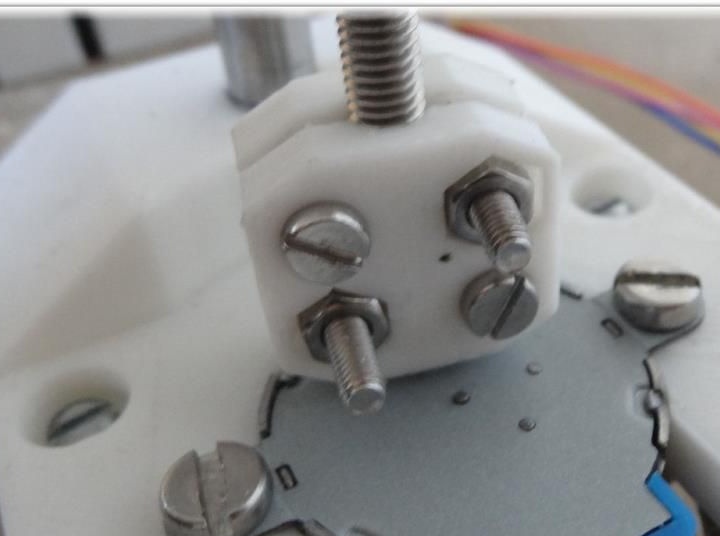
X-akselin luomiseksi kaksi M4x45-ruuvia on asennettava ”X-End” -osaan. Sitten voit kytkeä moottorin, miten se tehdään, näkyy kuvissa. Kuten ensimmäisessä tapauksessa, nyt sinun on kiristettävä hihna ja asennettava rajakytkin.
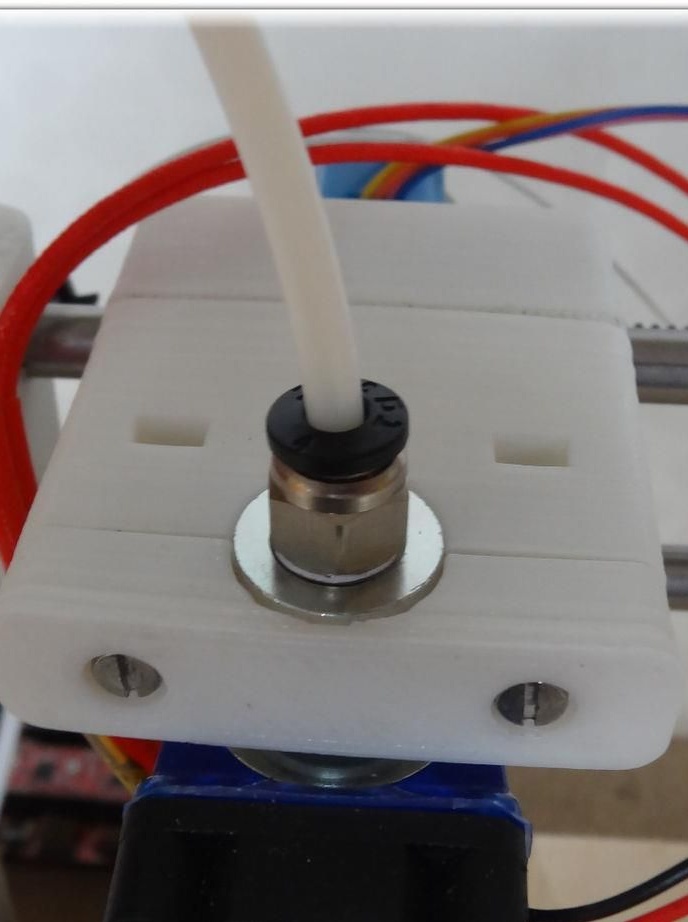
Suulakepuristin kiinnitetään kahdella ruuvilla, joiden mutterit ovat kooltaan M3x25.
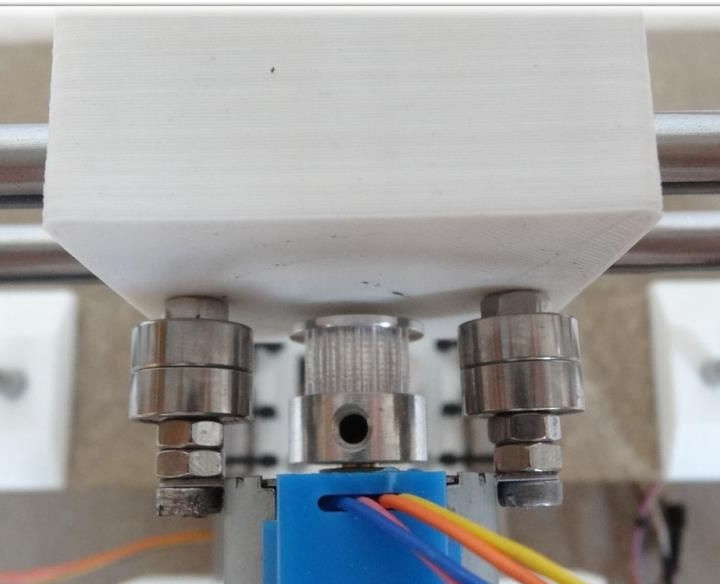



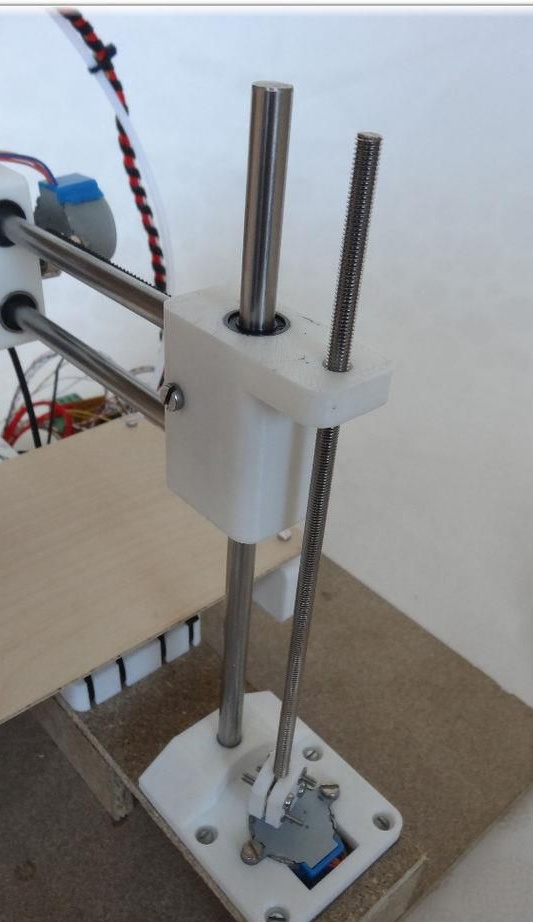
Vaihe neljä Z-akseli
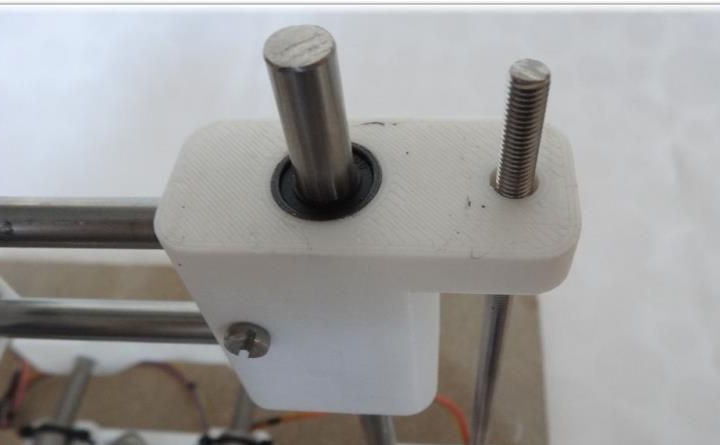
Tämän akselin kokoamiseksi sinun on otettava elementit “X-kuljetus” ja “X-päät”, LM8UU-laakerit on asennettu niihin.Seuraavaksi malli asennetaan ohjaimiin 17,5 cm (X-akseli) ja 21 cm (Z-akseli). Viimeisessä vaiheessa kierreakseli kytketään moottoriin.
Vaihe viisi Tulostuspöytä
Pöydän tekemistä varten on otettava 20x13-levy ja porattava siihen neljä reikää, joiden halkaisija on 3 mm. Sitten neljä M3x25-ruuvia kierretään.



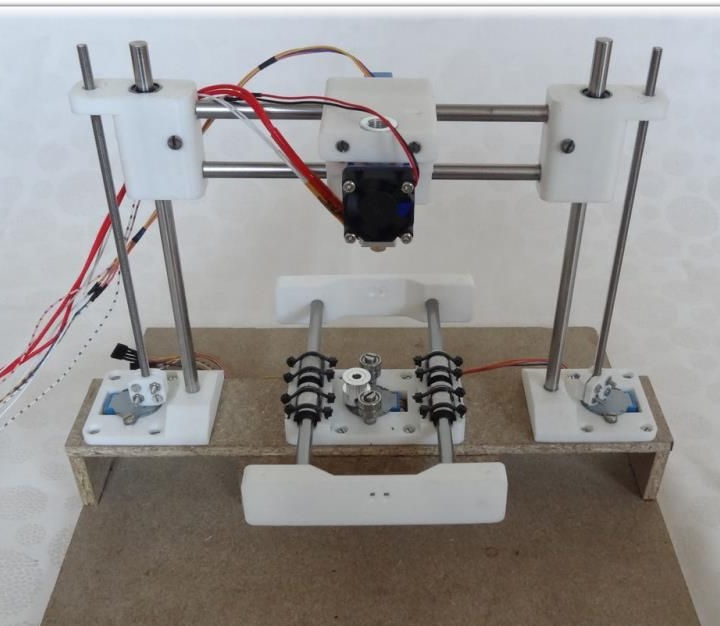
Vaihe kuusi Kokoonpanon viimeinen vaihe.
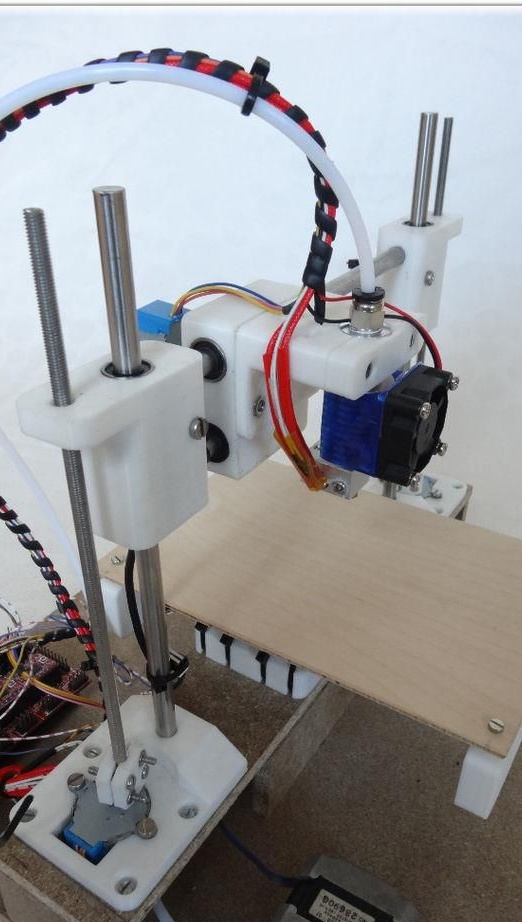
Tulostin on koottava kuvissa osoitetulla tavalla. Jos edellisissä vaiheissa kokoonpano suoritettiin tehokkaasti, nyt koko tulostimen kokoaminen ei ole vaikeaa.

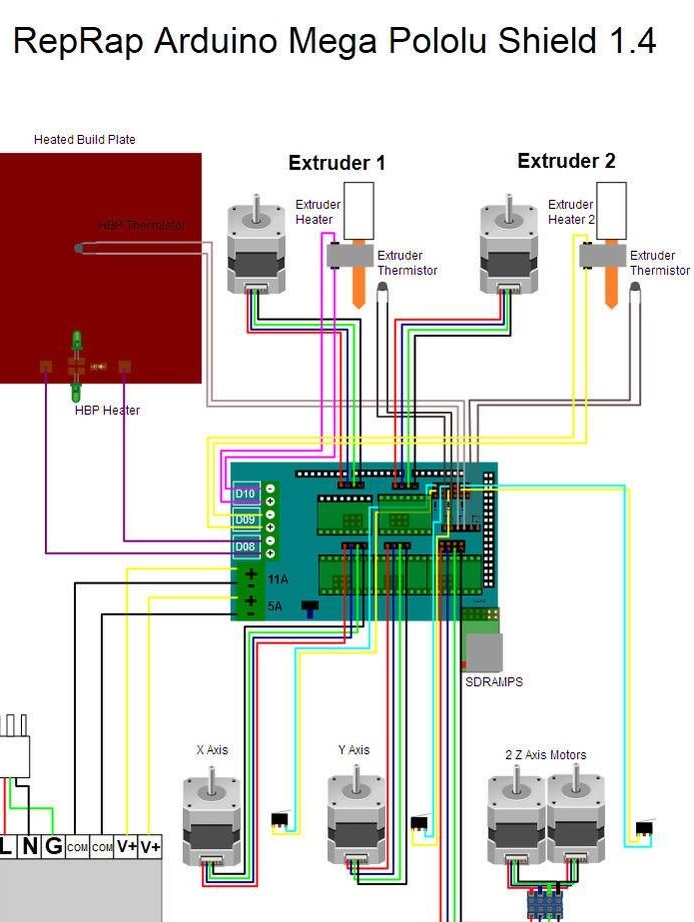
Seitsemäs vaihe. elektroninen piiri ja ohjelmistot
Elektroniikan kytkemiseksi sinun on navigoitava toimitetun järjestelmän mukaan. Ohjelmiston suhteen tarvitset Arduino IDE: n määritysohjelman. Lisäksi säätö tapahtuu koosta ja muista ominaisuuksista riippuen kotitekoinen.
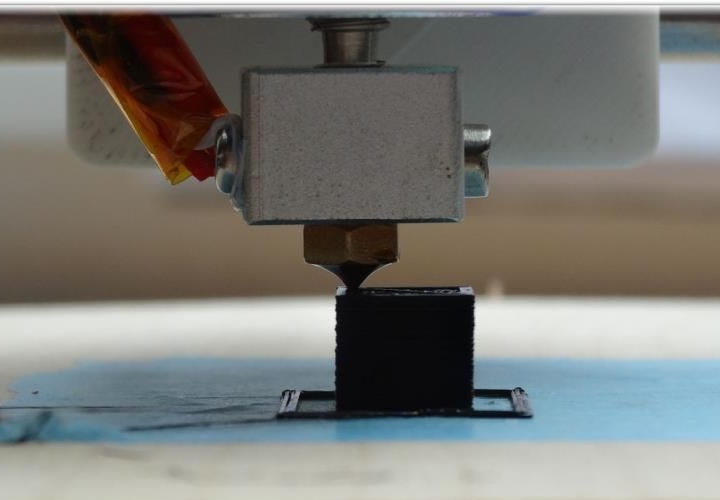
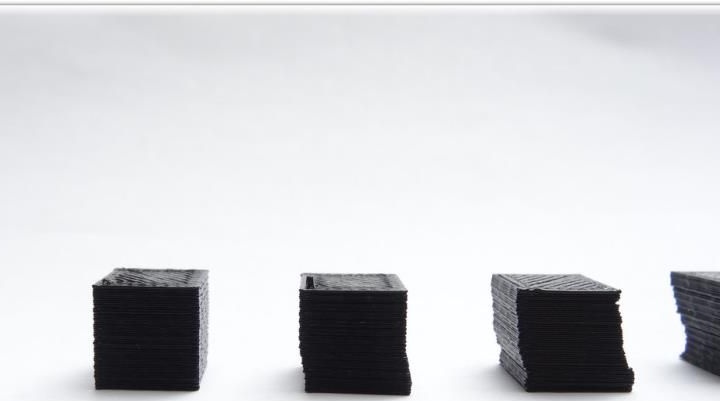
Vaihe kahdeksan. Tulostusprosessi
Laitteen kalibroinnin jälkeen siihen oli mahdollista tulostaa 1x1x1 cm: n kuutionäytteet. Laitteen ollessa toiminnassa havaittiin ongelma - moottorien ylikuumeneminen, jonka seurauksena kerrokset siirtyivät voimakkaasti. Tämän ongelman ratkaisemiseksi sinun on käytettävä A4988-tyyppisiä moottoreita, joiden mikrotason on 1/16, ja aseta virta pienimmälle arvolle. Lisäksi voit myös muuttaa laiteohjelmiston uudelleen, jolloin saavutat korkeamman laadun.


Tällaisella yksinkertaisella tavalla voit koota edullisen 3D-tulostimen. Jos sijoitat hieman enemmän rahaa, laite tulee melko korkealaatuiseksi ja kestäväksi.
Lataa viimeisimmät 3D-solmujen versiot