

Anturin signaalit on muutettava jännitteeksi, tätä tarkoitusta varten käytetään LM2917. Jännitteen kasvaessa kytkeytyy sarjaan 30 LEDiä, jotka kytketään kolmen LM3914-tyyppisen mikropiirin kautta.
Erityisesti tässä artikkelissa kirjoittaja korvasi ABS-anturin askelmoottorilla, koska se voi myös tuottaa pulsseja. Lisäksi tällainen moottori tuottaa myös jännitettä, joka kasvaa nopeuden kasvaessa. Tältä osin tarve käyttää jännitesäädintä LM2917 on kadonnut.
Materiaalit ja työkalut valmistukseen:
- askelmoottori (löytyy mustesuihkutulostimesta);
- johdot;
- juotosrauda juoteella;
- mikrosirut LM3914;
- virityspotentiometri 47 kOhm: lla;
- 31 LEDiä;
- paksu paperi näytön (pahvi) luomiseksi;
- kaksi vastusta 1 ohmia kohti;
- kolme vastusta 2,2 kOhm;
- elektrolyyttikondensaattori 470 μF / 25 V;
- kaksi polypropeenikondensaattoria / 100 nF;
- sakset ja muut pienet asiat.

Nopeusmittarin valmistusprosessi:
Ensimmäinen askel. Asenna nopeusanturi
Anturin valmistamiseksi voit käyttää infrapuna-ilmaisimia ja LED-valoja, erilaisia antureita ja niin edelleen. Kirjoittaja käytti näihin tarkoituksiin mustesuihkutulostimen askelmoottoria. Kahdesta valittiin suurin, joka tuottaa eniten virtaa ja signaaleja. Vaikein on kytkeä moottori kaapelilla, eli laittaa askelmoottori edellisen valintanopeuden sijaan.

Molempien akselien kytkemiseksi käytettiin kuparilevyn pala, joka leikattiin haluttuun kokoon. Se on asetettu uriin ja tarjoaa siten erinomaisen kytkennän akseleiden välillä.Itse moottorin on myös oltava kunnolla kiinni, koska se on painava ja ajaa ohjaamon ympäri ajaessasi, mikä voi rikkoa rakennetta. Moottorikotelossa voit porata reiän ja ruuvaa sen sitten oikeaan paikkaan pultin ja mutterin avulla.



Vaihe toinen Elektroninen piiri
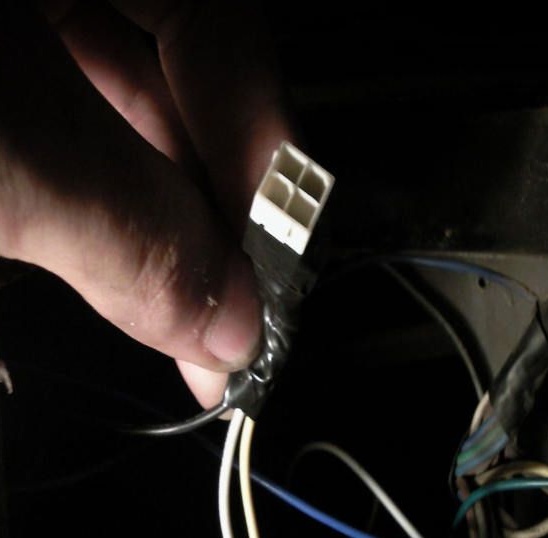
Askelmoottorin asentamisen jälkeen ilmestyy 4 johtoa, jotka on kytkettävä oikein. Kirjailija otti ensimmäisen johtimen signaalina ja toisen maana. Alustavan testauksen aikana moottori tuottaa noin 48 V. Jos kytket moottorin voimansiirtoon ja pyörität sitä suurimpaan mahdolliseen arvoon, se antaa 28 V. Samanaikaisesti voimme päätellä, että jännite kasvaa lineaarisesti pyörimisnopeuteen nähden, ja tämä on erittäin hyvä ja tämä jännite riittää toimimaan nopeusmittari.
12 V: n jännite syötetään akusta ja maadoitus voimansiirrosta. Signaalin tuottaa askelmoottori. LM3914-mikropiirin viidennen tulon on kestettävä noin 35 V: n jännite. Signaalin kalibrointiin käytetään 45 kOhm trimmeripotentiometriä. Nopeusmittari kalibroidaan GPS: n avulla, joka on puhelimessa tai navigaattorissa.
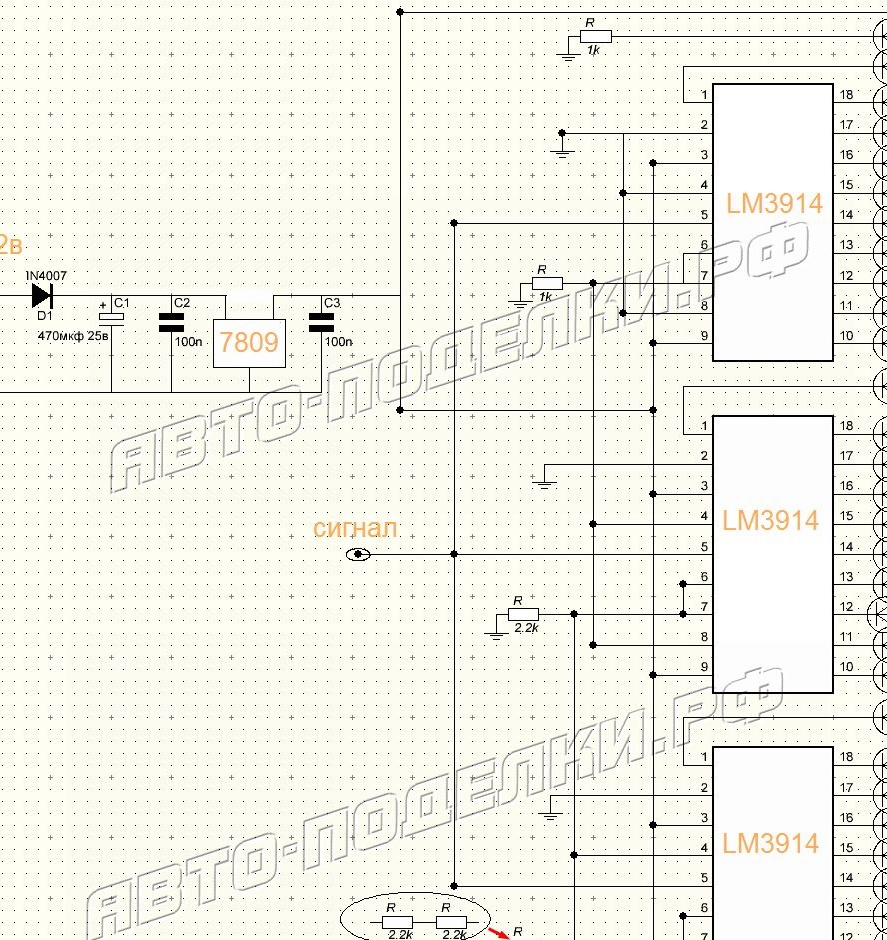
LM3914-sirut ovat LED-näytönohjaimia. Jokaista näistä ohjaimista tarvitaan kymmenen merkkivalon ohjaamiseen, se voi olla joko segmentoitu tai pistetila. Tilat kytketään liitteenä olevien ohjeiden mukaisesti. Mitä tulee säätimeen 7809 (9V), se säätelee jännitettä.
Vaihe kolme Nopeusmittarin kokoaminen
LEDiä tulisi olla yhteensä 31, valo valitaan yksittäin, tärkeintä on, että ne ovat kirkkaita. Kirjailija käytti kirkkaan valkoisia LED-valoja. Voit tehdä nauhan moniväriseksi esimerkiksi laittamaan lopussa punaisen, mikä osoittaa suurta liikkeenopeutta, ja ensimmäisten vihreiden tai sinisten merkkivalojen.
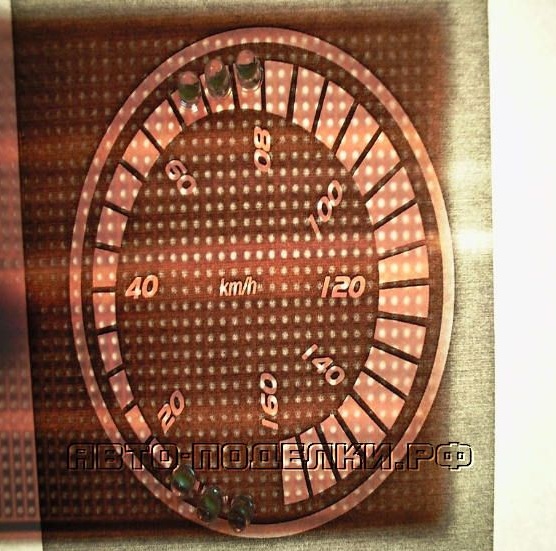



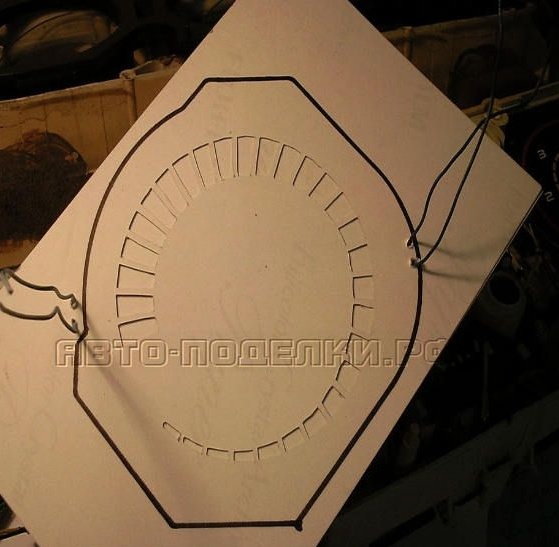
Ensimmäisen merkkivalon on oltava päällä jatkuvasti, kun + 12 V: n virta on kytketty. Loput 30 sisällytetään sarjaan kasvavan ajoneuvon nopeuden kanssa. LEDien perusta on valmistettu pahvista, niitä vastapäätä on leikattu suorakaiteen muotoisia osastoja, joihin liimataan sitten ohuempi paperi. Kun merkkivalot toimivat, valo kulkee vain ohutpaperin läpi, muodostaen kuvan, joka näkyy. Paperi voidaan maalata minkä tahansa värin kanssa. Luonnollisesti myöhemmin tämä koko malli laitetaan vanhan valintanopeusmittarin sisäpintojen sijasta.
Diodien välillä sinun on tehtävä väliseinät, jotta valo ei leviä koko nauhan läpi. On parasta käyttää alumiinia, se heijastaa valoa täydellisesti.

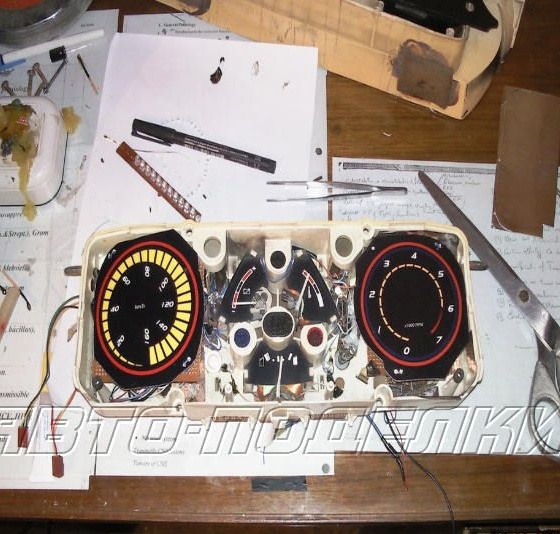

Siinä kaikki, nyt jää vain asentaa nopeusmittari ja kytkeä se. Kuvassa voit nähdä, että kirjoittaja on korvannut sellaisen homebrew oksa ja kierroslukumittari.