

Artikkelissa tarkastellaan esimerkkiä legendaarisen robotin, nimeltään "Canbot", luomisesta. Suurin osa robottin yksityiskohdista tulostetaan 3D-tulostimella. Robottia ohjataan kauko-ohjauksella.
Materiaalit ja työkalut kotitekoinen:
- Yksi Atmel Attiny85-mikrokontrolleri;
- kaksi mikropalvelua HXT900 tai niiden analogit;
- yksi 3,7 V LiPo-akku;
- yksi infrapunavastaanotin 38 kHz: n taajuudella;
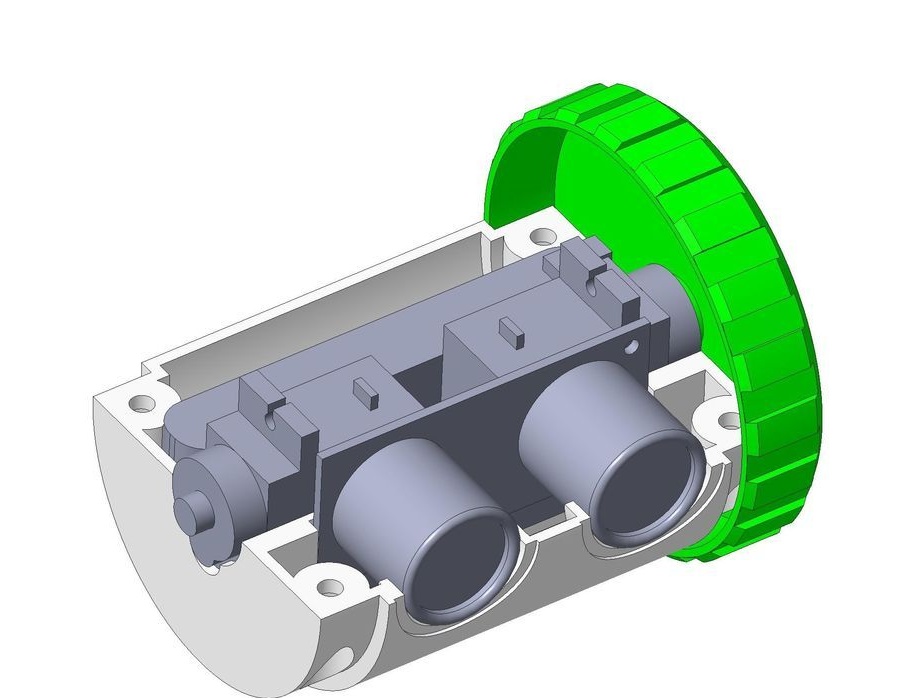
- ultraäänianturi, tyyppi HC-SR04;
- 9x4mm kytkin tai hyppääjä sen sijaan;
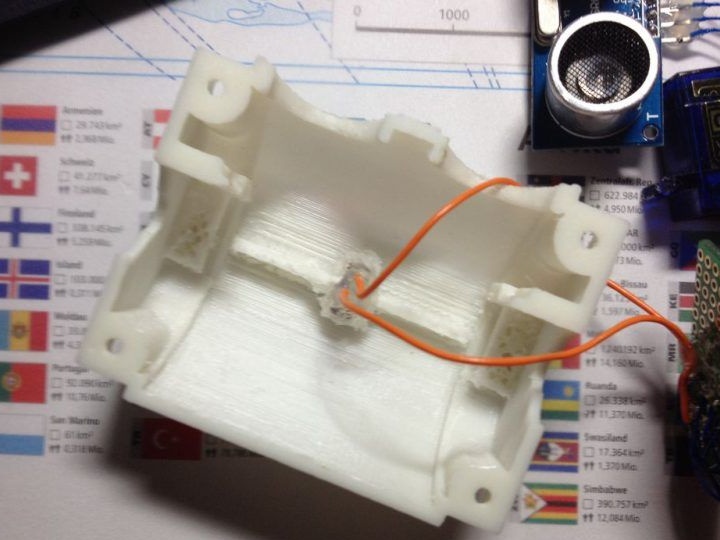
- 3D-osat (mahdollista). Se vie yhden yläosan (top.stl), yhden alaosan (bottom.stl) ja kaksi pyörää (wheel.stl).
Tietysti tarvitaan juottamistyökaluja, kuumaa liimaa, ruuvimeisselit, ruuvit, johdot ja muut pienet asiat.

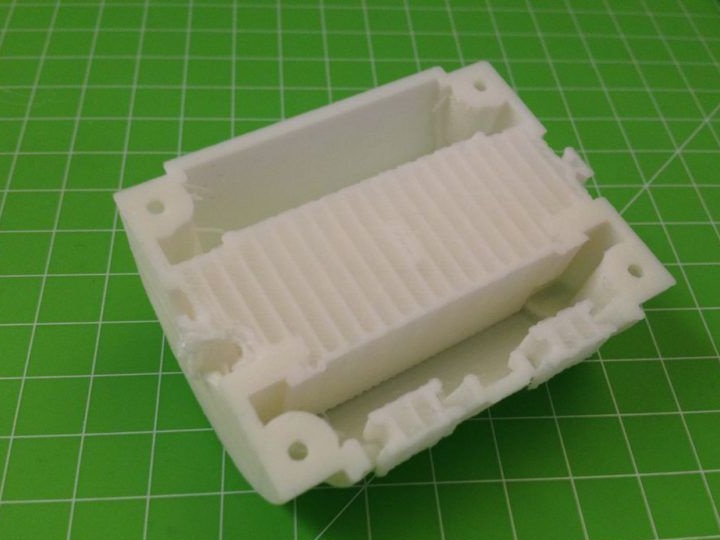
Ylä- ja alaosa tulee tulostaa tasaisesti alaspäin käyttämällä ”tukirakenteita” -vaihtoehtoa. Käytettyjä osia on ehkä puhdistettava lopulta käytetystä tulostintyypistä riippuen.
Robotin valmistusprosessi:
Ensimmäinen askel. elektroninen osa robottia
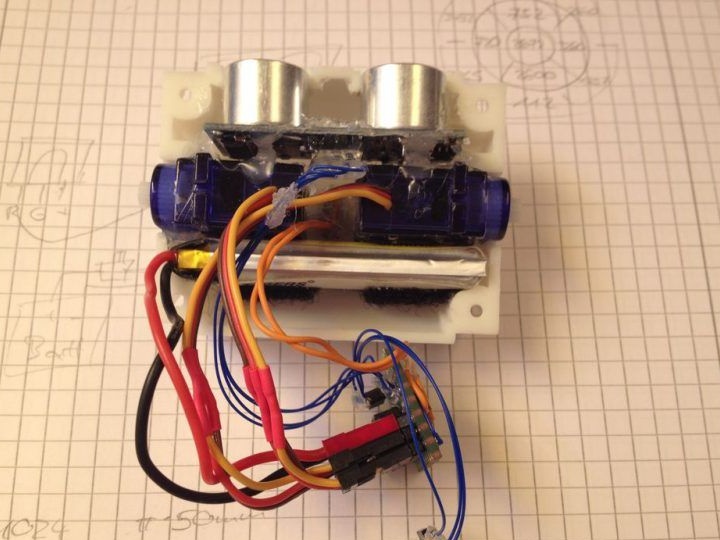
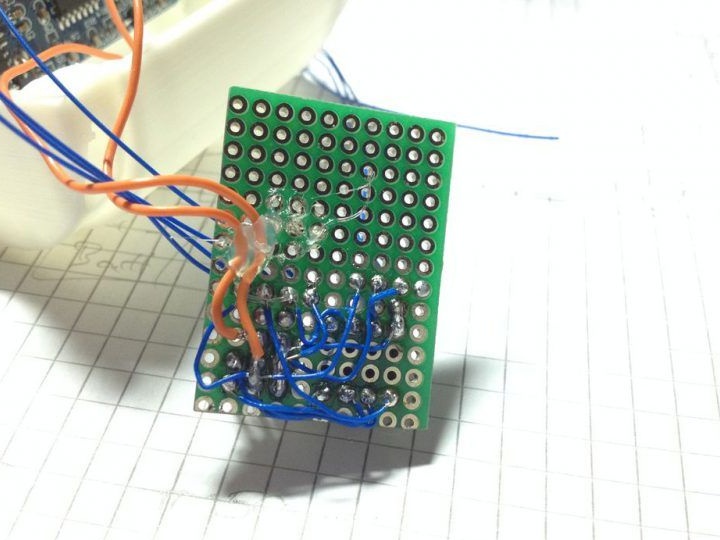
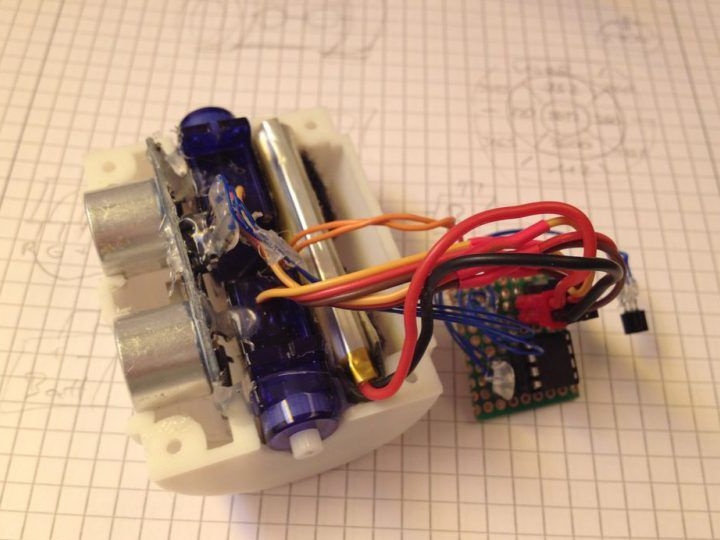
Ensin sinun on määritettävä servit, ne on muunnettava jatkuvaksi kiertoksi. Kuinka tehdä tämä, Internetissä on paljon ohjeita. No, sitten kaikki elektroniset elementit on koottava kuvan osoittamalla tavalla. Elektronisen osan kokoaminen oli kätevää, voit ottaa pienen leipälevyn sekä ohuet johdot.


Vaihe toinen Robotin ohjelmisto-osa
Jos lähestyt robotin luomisprosessia, jolla on korkein ammattitaito, niin ohjelmisto-osa voidaan kirjoittaa itsenäisesti. Mutta tätä varten sinun on opittava ohjelmointikieli. Yksinkertaisemmassa versiossa voit ladata valmis koodin ja ladata sen yksinkertaisesti mikro-ohjaimeen.
Kirjoittajan mukaan paras robotti vastaanottaa infrapunasignaaleja Sony-merkkisistä kaukosäätimistä. Jatkossa koodiosa on ”reflash” Työläs ja tulostaa tiedot Serial.print () -toiminnon kautta. Seurauksena on, että on mahdollista selvittää, mikä koodaus on jokaisella painikkeella.
Vaihe kolme Viimeinen vaihe. Kokoa robotti
No, lopuksi robotti menee. Näitä tarkoituksia varten tarvitset kuumaa liimaa. Sen avulla johdot on kiinnitettävä niin, että ne eivät irtoa robotin liikkuessa.Kytkin on myös kiinnitettävä ja ultraäänianturi on kiinnitettävä hyvin. Yhteenvetona voidaan todeta, että robotin kannet on kytketty neljällä ruuvilla, minkä seurauksena se voidaan tarvittaessa purkaa helposti. Muuten, servojen ruuvit ovat täydellisiä asennusta varten.

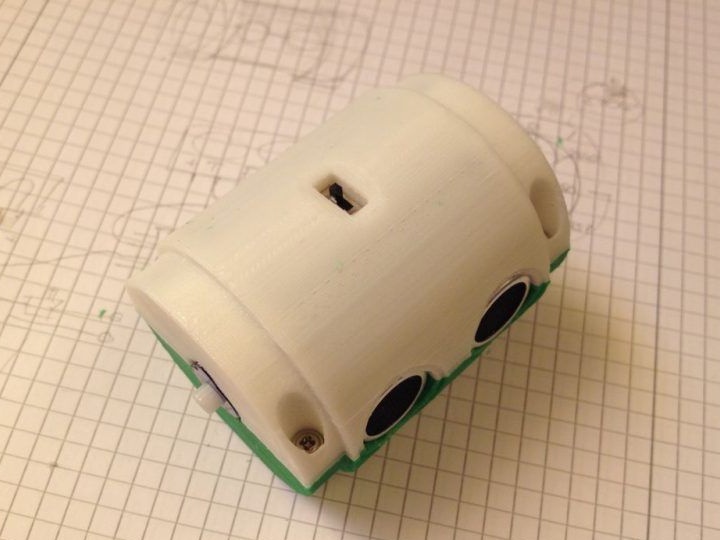
Siinä kaikki, nyt robotti on melkein valmis. Jää jäljellä pyörien asentaminen servomoottorin akseleille ja voit aloittaa robotin testauksen. Voit nähdä yksityiskohtaisemmin, kuinka kotitekoinen työskentelee videossa.