


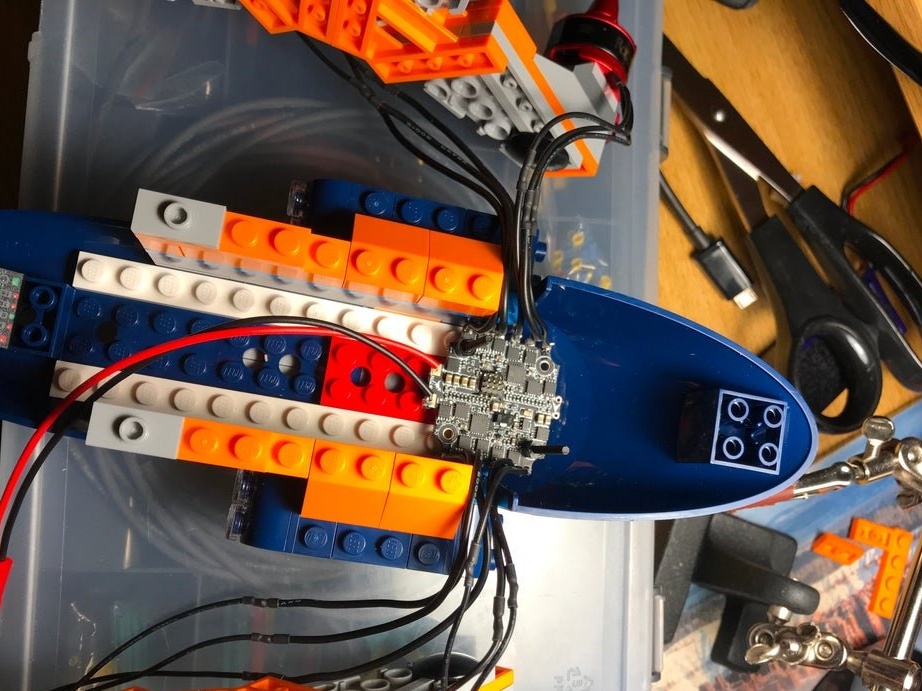
Tässä artikkelissa velho näyttää meille kuinka hän valmisti toimivan Lego 60193 Arctic Air Transport -helikopterin malli quadrocopter. Quadrocopterin valmistuksen päätehtävänä oli lentämisominaisuuksien lisäksi säästää mahdollisimman monta alkuperäistä osaa.
Katsotaanpa lyhyt video, joka osoittaa nelikopterin toiminnan.
Joten tällaisen nelikopterin valmistukseen päällikkö käytti seuraavaa
Työkalut ja materiaalit:
-LEGO kaupungin arktinen helikopteri - 60193:
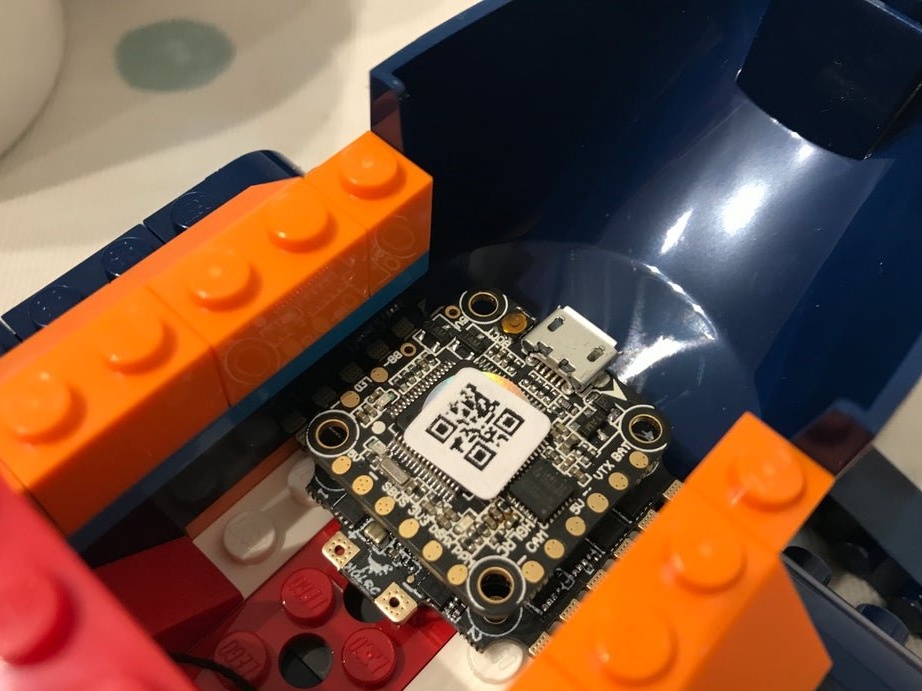
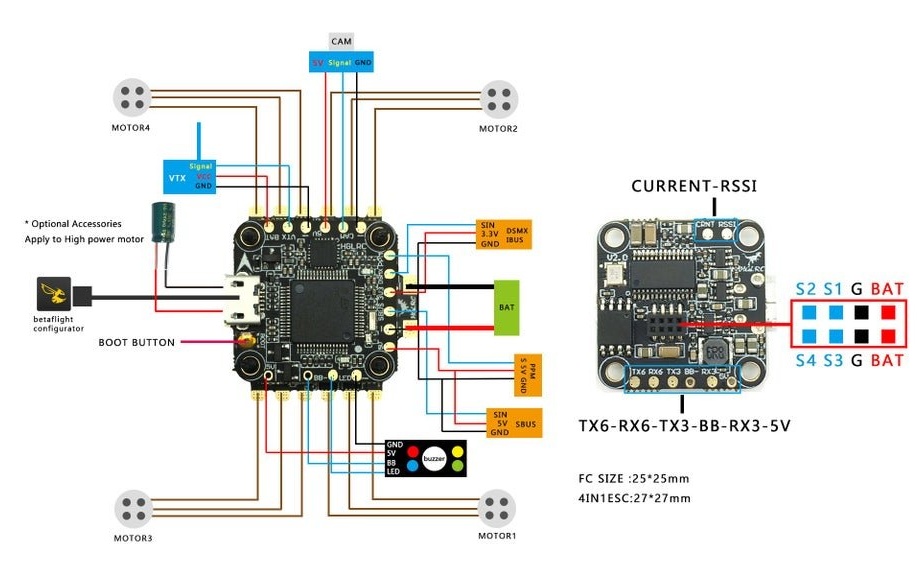
- Ohjain ja ESC 20x20 mm, esimerkiksi HGLRC XJB F428 Micro F4 AIO OSD;
- Harjattomat moottorit - 4 kpl;
-Propellery;
-Akku 950 mAh;
-Razemy;
näkö-;
-Radio-moduuli (lähetin ja vastaanotin);
-Krepezh;
-Nozh;
-Juottimet;
-Glue ase;
- ruuvimeisseli;
-Drel;
Vaihe yksi: Lego Build
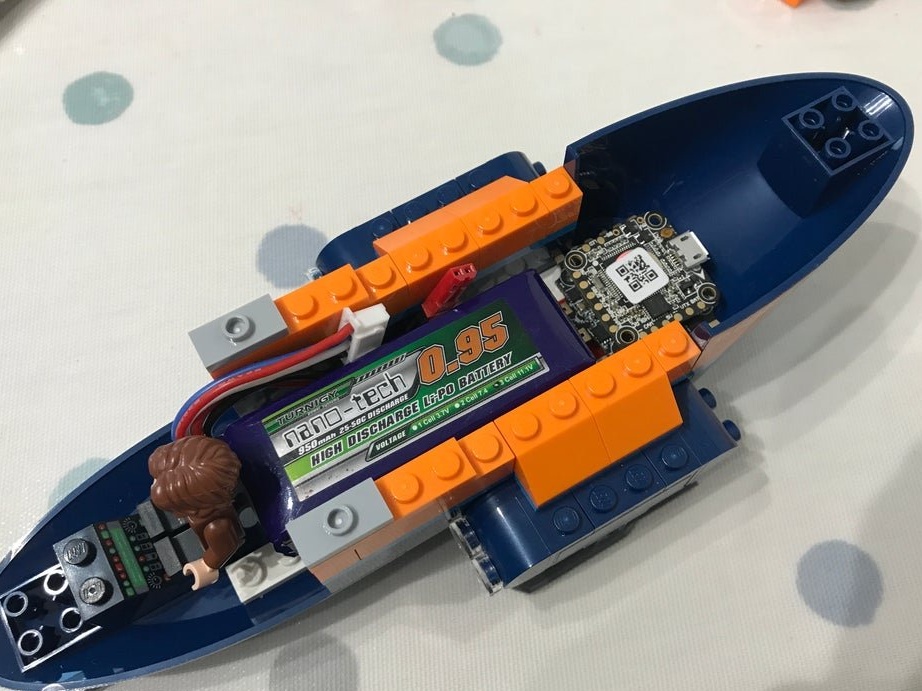
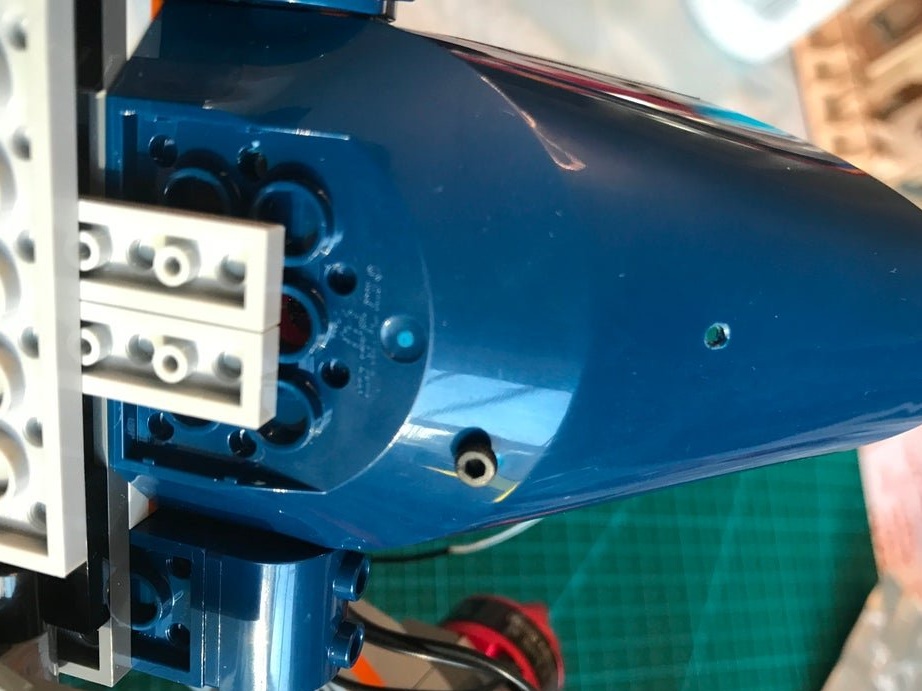
Ensinnäkin, mestari kerää LEGO-Arktisen. Sitten malli puretaan osittain. Sisälle on asetettava paristo ja ohjain, tarkkailemalla mallin tasapainoa.


Vaihe toinen: Moottorin kiinnitys
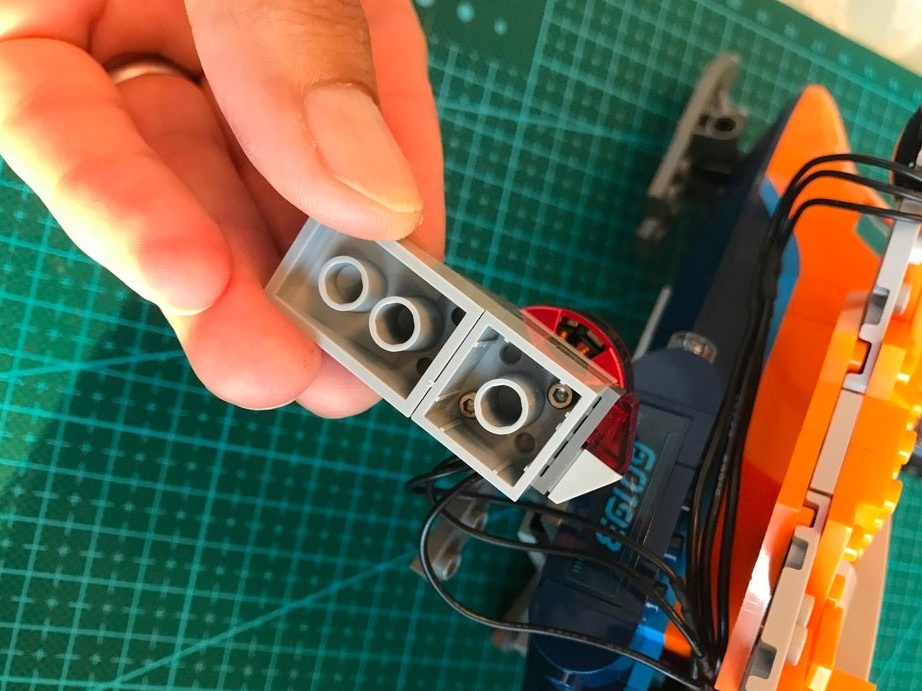
Tavallisen harjattoman 1806-moottorin kiinnitysreiät ovat melko samat kuin tavallisen LEGO 2x2 -levyn navat. Jokaisessa quadrocopterin ”moottori” -kiinnityksessä on 2x2 tummanharmaata laattaa (LEGO 3022) ja 2x2 vaaleanharmaata laattaa, jossa on pystytaso (LEGO 2460), jota yleensä pidetään LEGO-potkurin napoissa.
Päällikkö poraa kiinnitysreiät. Moottorien keskellä on laskuvesi. Laatan keskelle on porattu reikä sen alle. Varmistaa moottorit.








Vaihe kolme: Olkapäät
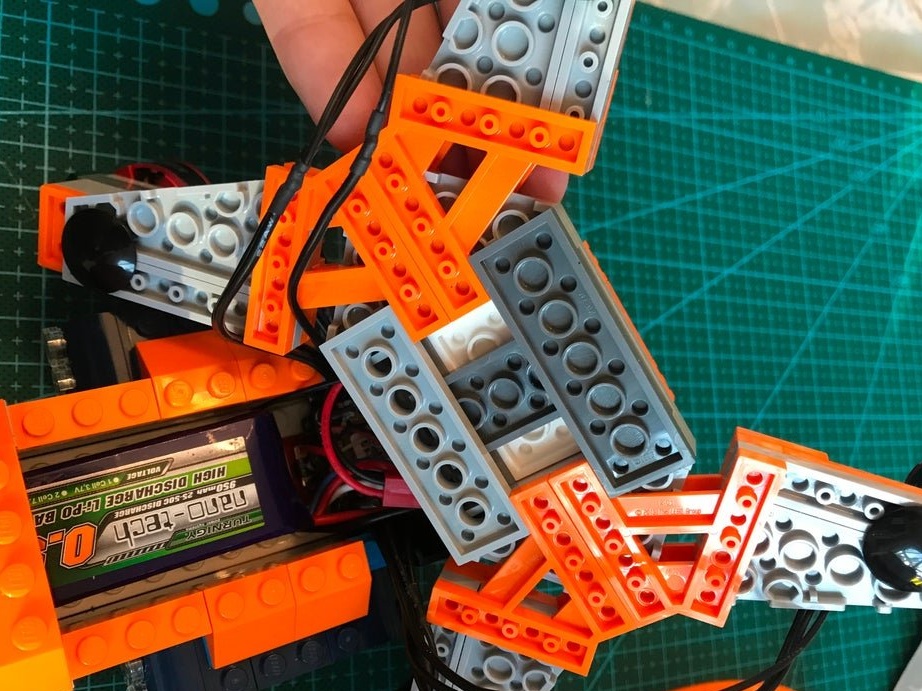
Järjestämällä nelikopterin “hartiat”, voit muuttaa asetusta hiukan siten, että moottorit järjestetään laajemmin tai kapeammin ja ruuvien sijainti toisiinsa nähden.
Tavallisessa LEGO-kokoonpanossa (ensimmäinen kuva) on “hartiat” ja moottorit sijaitsevat leveästi (vaakasuorassa) melko suurella ruuvipinnalla. Mestari kääntää ”hartiat” ja heittää moottorin ja sen mukaisesti ruuvit.



Vaihe neljä: elektroniikka
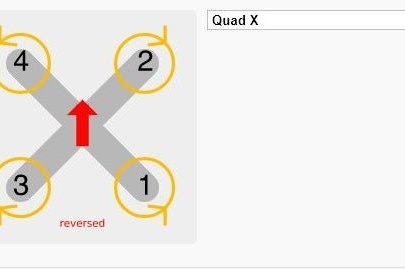
Järjestelmän mukaan se asentaa elektroniikkaa. Ensimmäisessä valokuvassa on kaavio moottorien pyörimissuunnasta. Pyörimissuuntaa voidaan muuttaa myös ohjelmointivaiheessa.

Kun asennus on valmis ja ennen akun kytkemistä, ohjattu toiminto tarkistaa liitännät rikkoutumisen tai oikosulun estämiseksi.
Kun kytket virran, sinun pitäisi nähdä ohjaimen valot ja muutama piippaus ESC: stä.
Vaihe viisi: asennus
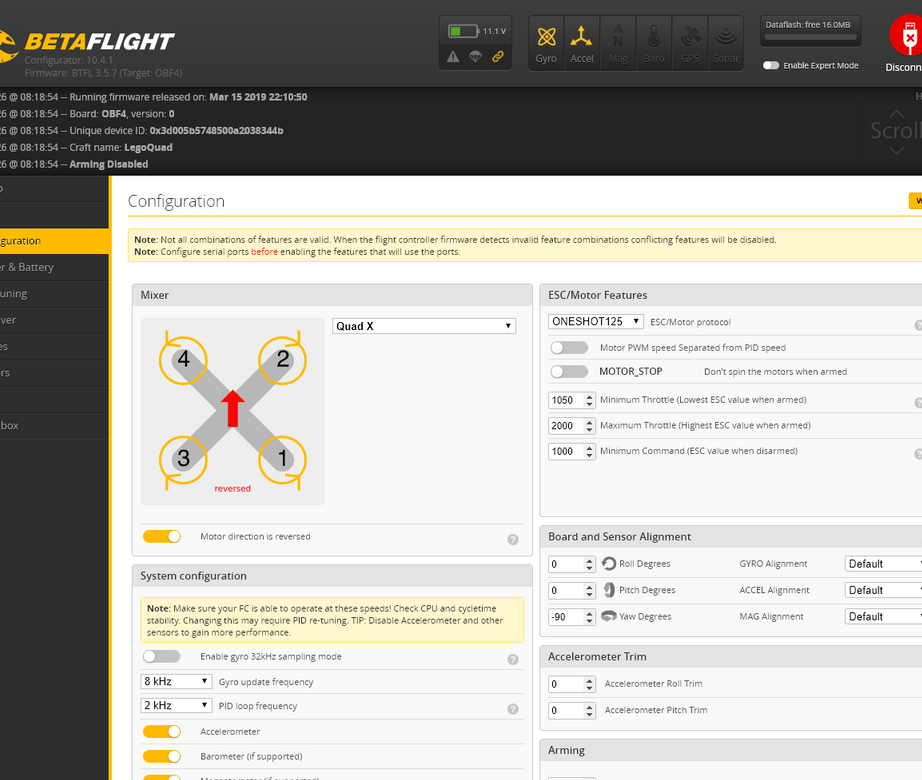
Nyt kun kaikki on kytketty, on aika määrittää ohjain.Tämä tarkoittaa ohjelmiston (sulautettujen ohjelmistojen) lataamista, joka suorittaa tehtävän dekoodata ohjaussignaalit RC-lähettimeltä, prosessoida anturin tulosignaalin (kiihdytin, gyroskoopit) ja antaa ohjaussignaalit ESC: lle moottorien pyörittämiseksi annetulla nopeudella.
Poista potkurit turvallisuuden vuoksi! Paristoa ei tarvita muutaman ensimmäisen asennusvaiheen aikana, vain USB-virta.
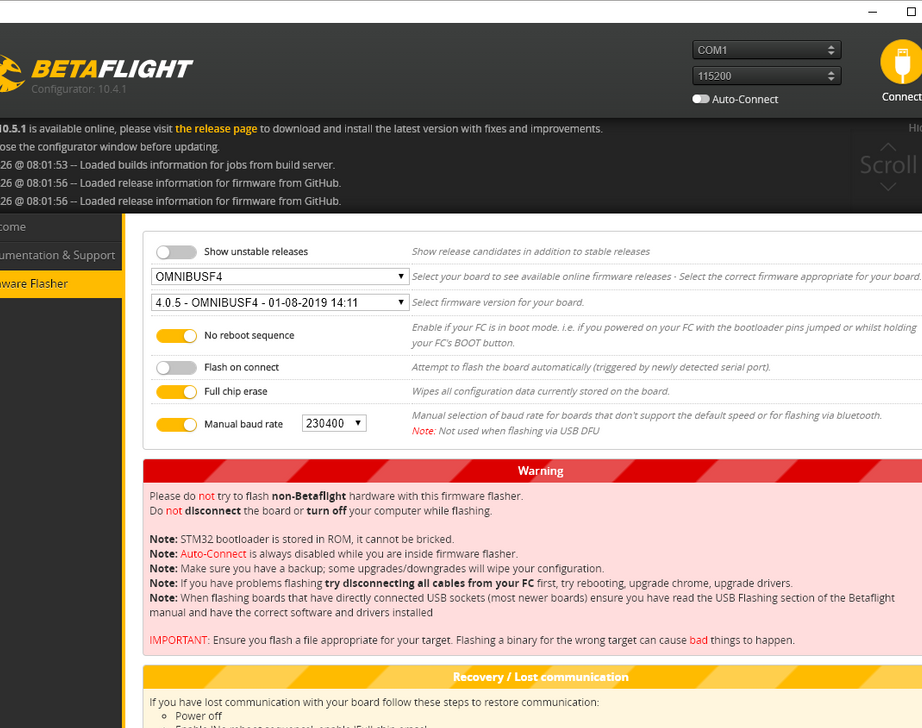
Lataa Beta Configurator
Kytke mikro-USB-kaapeli ohjaimeen. Huomaa, että tämä voi olla helpompaa tehdä, jos säädintä ei ole ruuvattu runkoon.
Lataa ja lähetä ohjaimelle sopiva laiteohjelmisto.
betaflight-asetukset-legoquad.txt
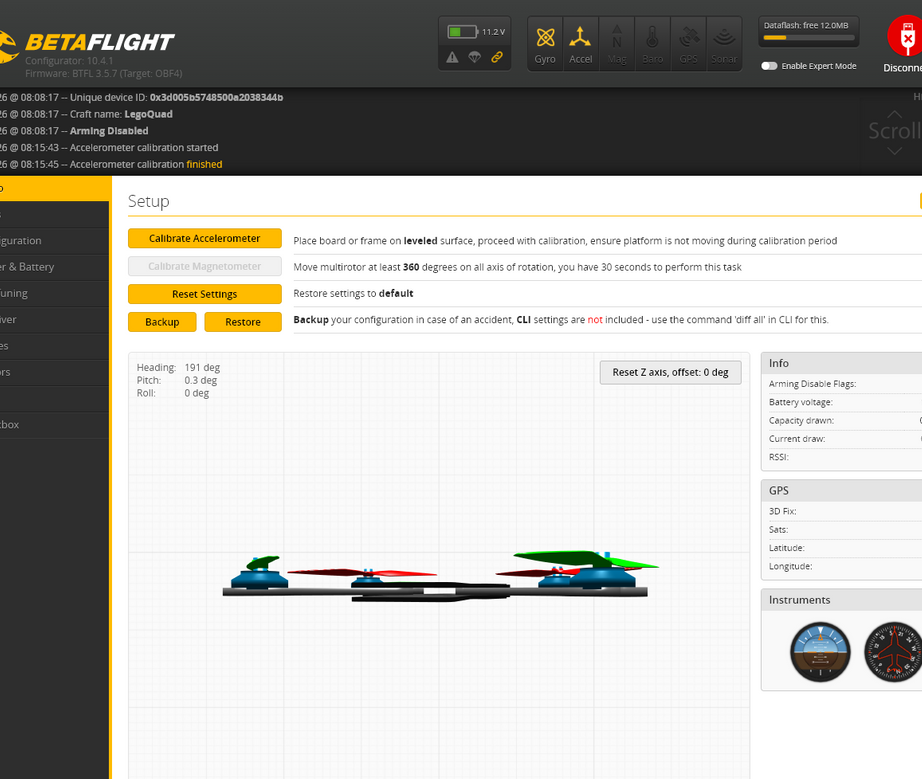
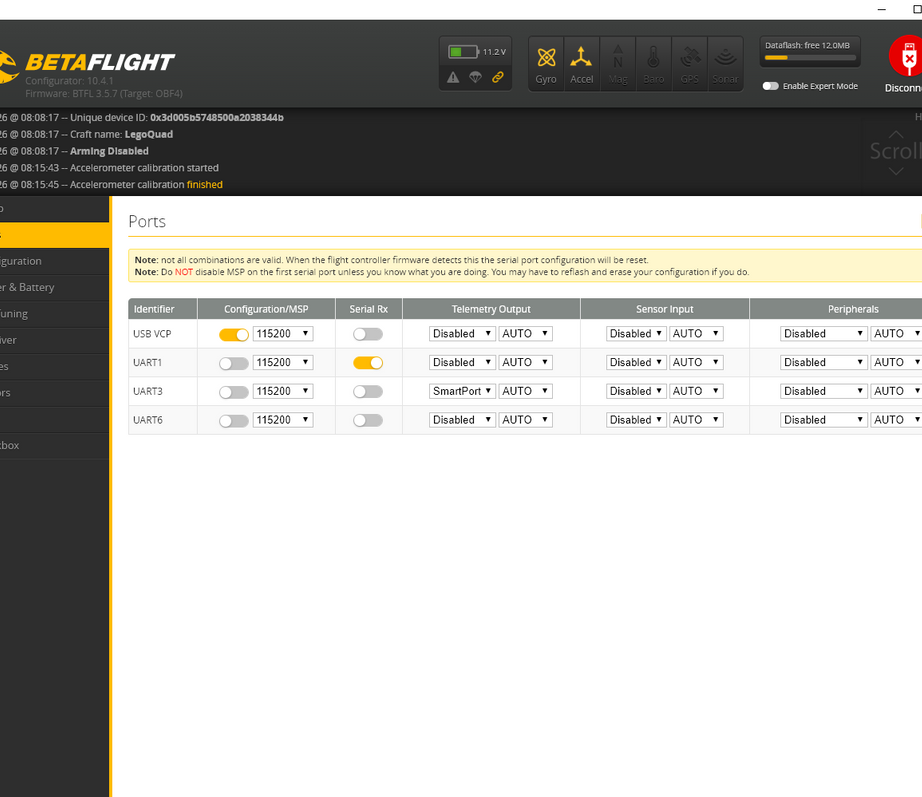
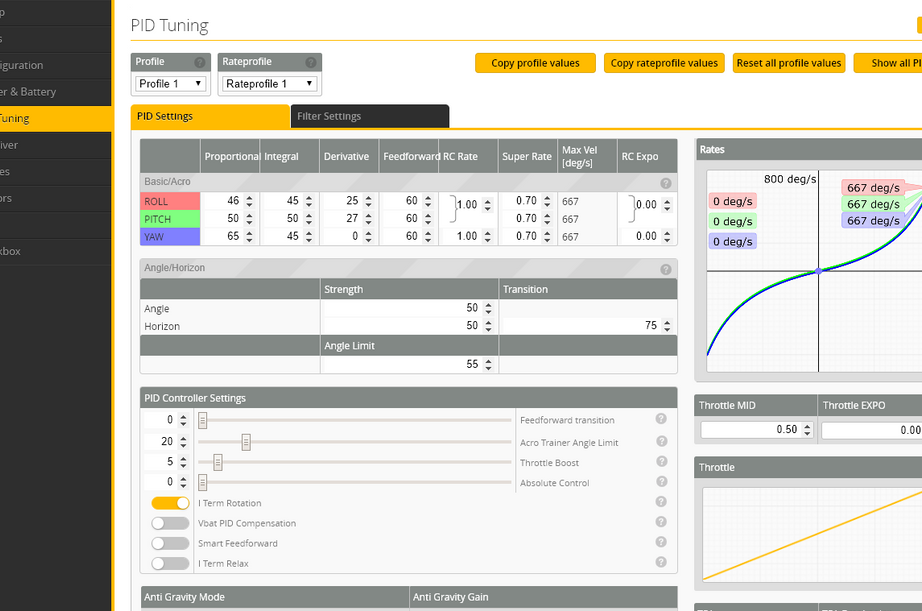
Napsauta “Yhdistä” -painiketta ja määritä seuraavat asetukset:
1. Asennus - moottorin mallikalibrointi
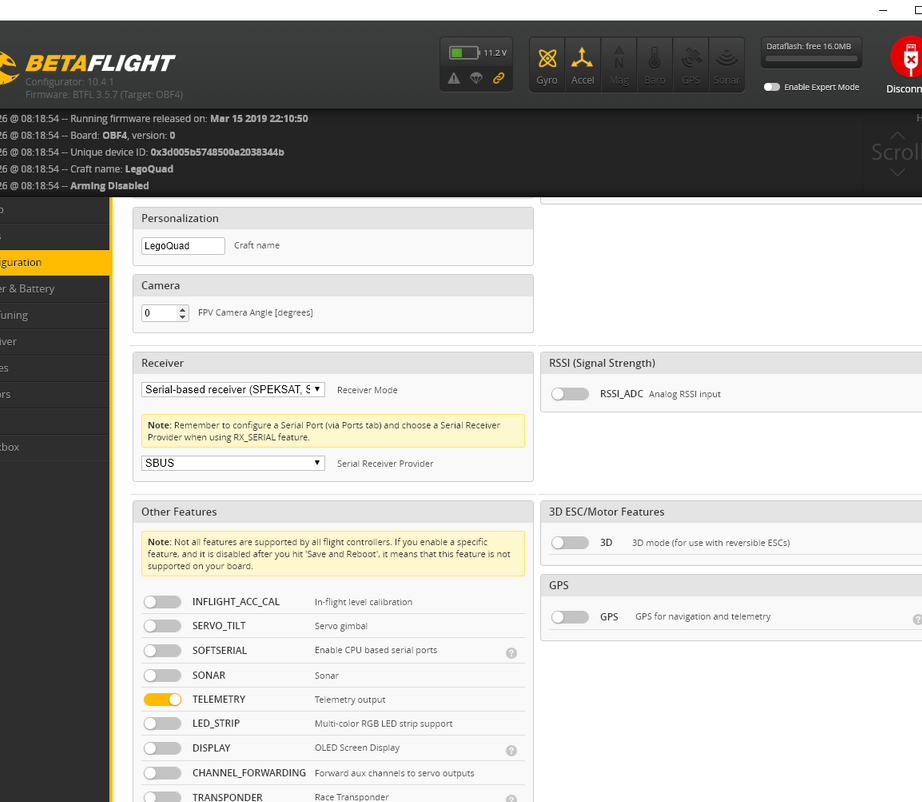
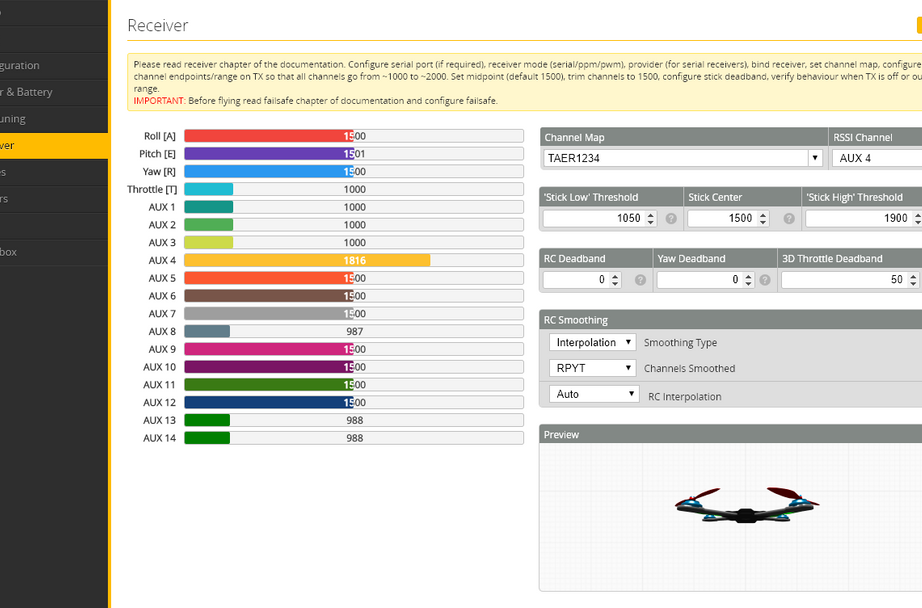
2. Määritä portit - UART1 - Serial RX SBUS RC -vastaanottimen kytkemistä varten
3. Tallennus ja uudelleenkäynnistys
4. Muodosta yhteys vastaanottimen ja lähettimen välille
5. Ylikuormitus
6. PID-isäntän arvoksi asetetaan 250
7 Kytke akku
8. Säädä jännite.
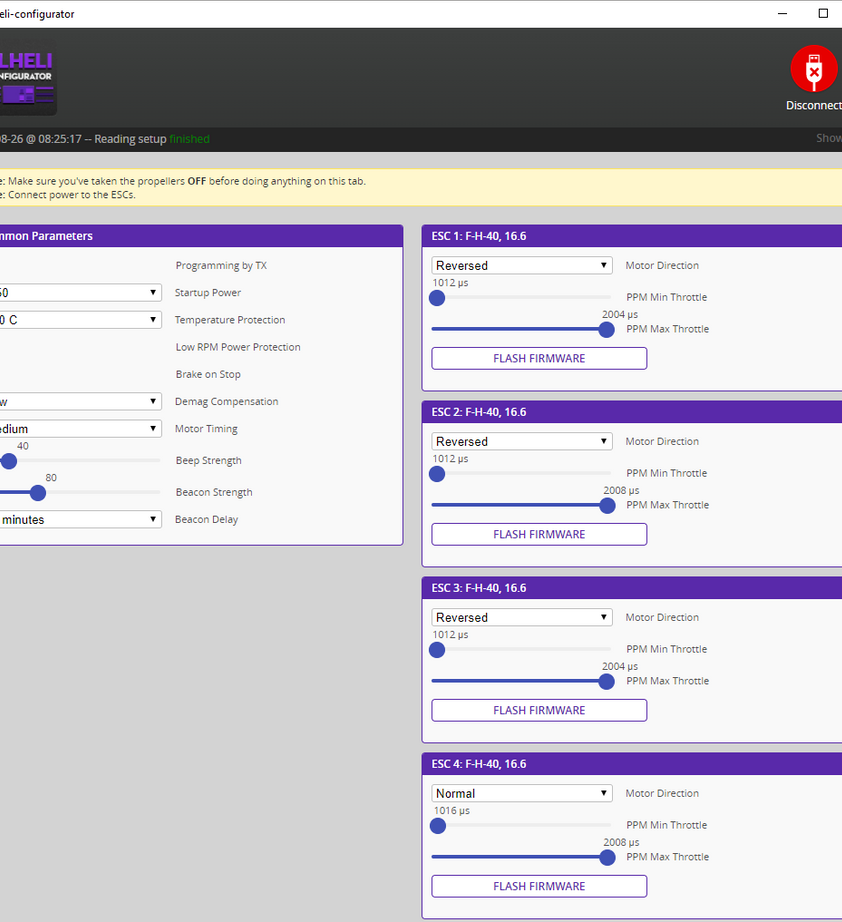
9. Varmista, että kanavanäyttö ja ohjaussuunta ovat oikein. Kun kaikki on asetettu, oikeassa alakulmassa olevan quadcopter-mallikuvan tulisi liikkua kaikkiin oikeisiin suuntiin, kun siirrät ohjaussauvoja RC-ohjaimessa.
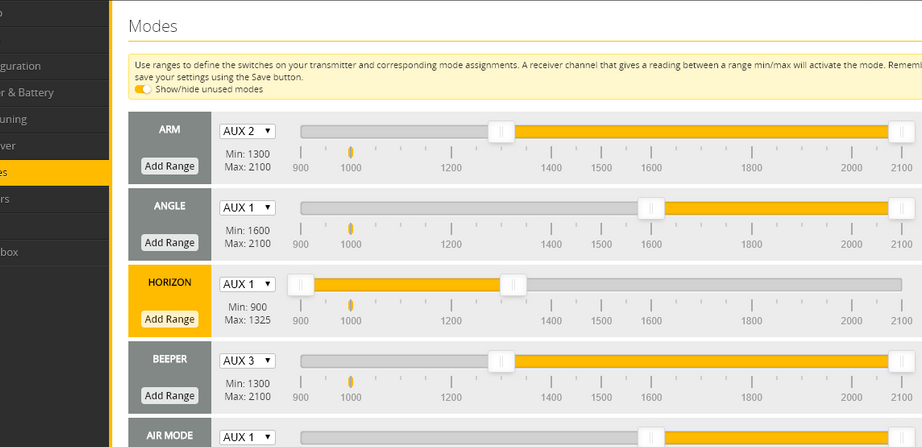
Konfiguroi tilat.
ARM päällä / pois
HORIZON itsetasaava / ACRO perinteiseen FPV-lentoon
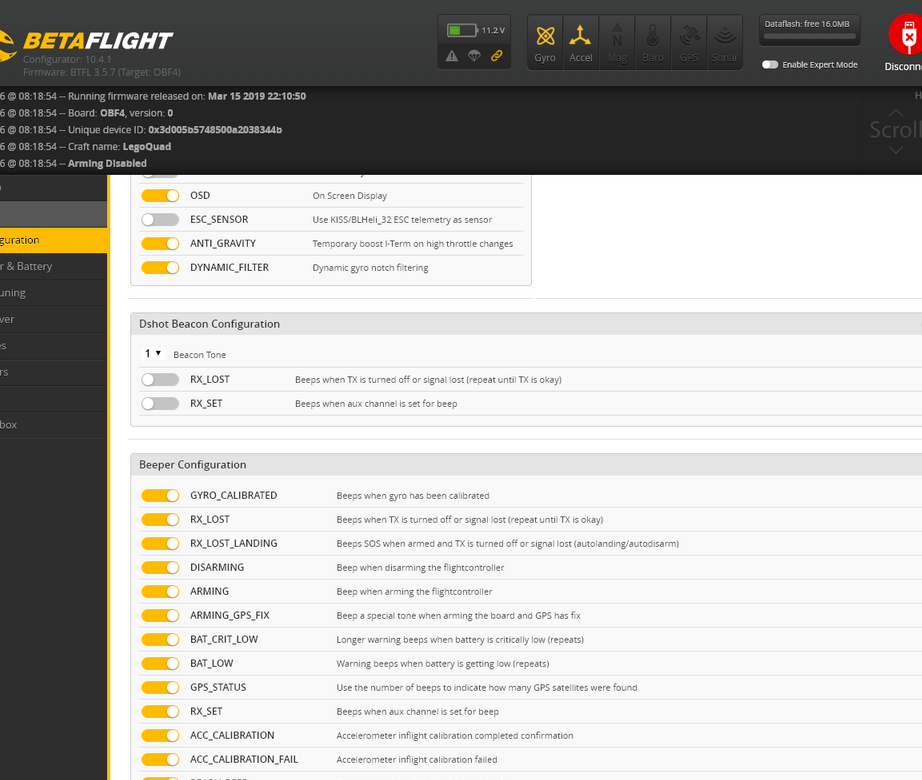
BEEPER - Hyödyllinen, jos kadotat mallin korkealta ruoholta tai pensailta.
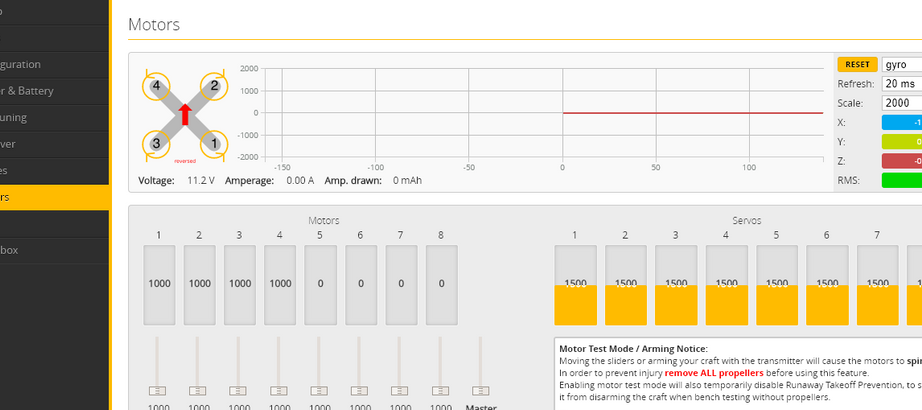
“Moottorit” -välilehti - käytä tätä vaihtoehtoa tarkistaaksesi jokaisen moottorin erikseen ja mikä tärkeintä, merkitse kunkin moottorin pyörimissuunta.
Korjaa väärä pyörimissuunta BLHELI-konfiguraattorilla
Kaikkien näiden vaiheiden jälkeen voit irrottaa USB: n ja akun, kytkeä virta päälle ja tarkistaa, että kaikki toimii:
Kytke lähetin ja virta päälle
Kytke akku ja asenna nelikopteri tasaiselle alustalle
Kytke ARM-kytkin päälle ja moottorien tulisi alkaa pyöriä alhaisella nopeudella.
Tarkista kaasu ja lisää samalla nopeutta
Kokeile vaakatilassa kallistaa nelikopteria ja varmista, että moottorit reagoivat asianmukaisesti, esimerkiksi kallista sitä eteenpäin ja etumoottorit kiihtyvät.

Vaihe kuusi: Lopullinen kokoonpano
Käytännössä koko kotelon rakenne pidetään kiinnityslukoilla. Päällikkö käyttää vain sulateliimaa moottorien asentamiseen.


Kaikki on valmis ja voit testata.



