




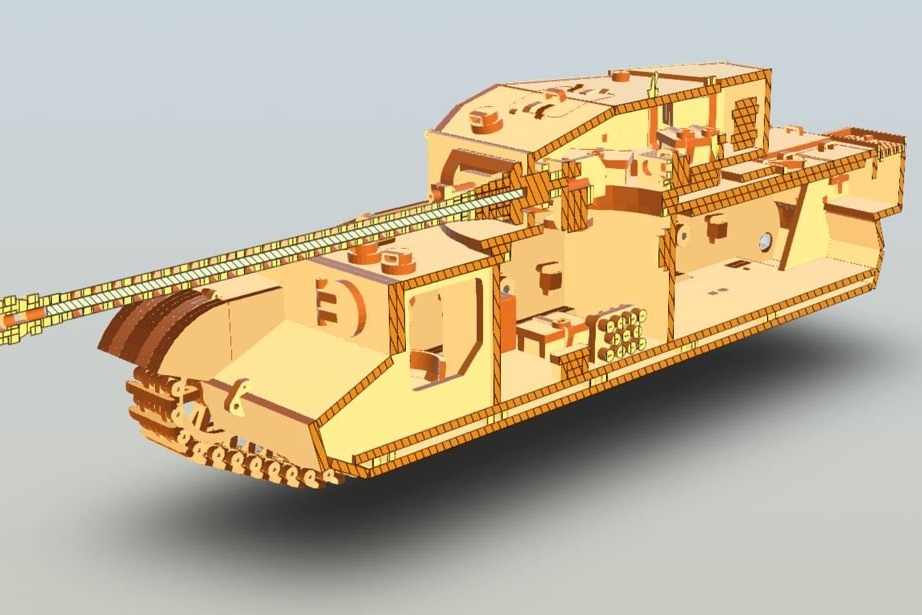
Tämä säiliö ei ole päällikön ensimmäinen kokoonpano. Tämän mallin erottuva piirre on jousijousitus, varustaminen malli moottorilla, huollettavuus.
Katsotaanpa demo.
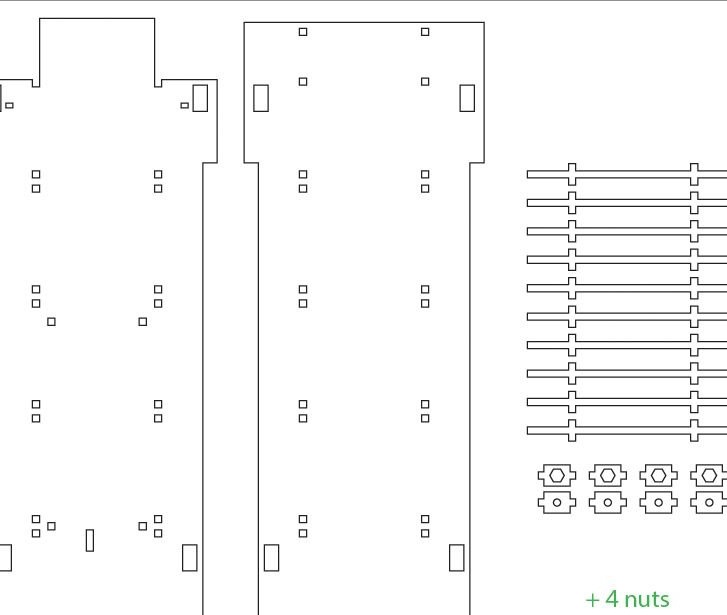
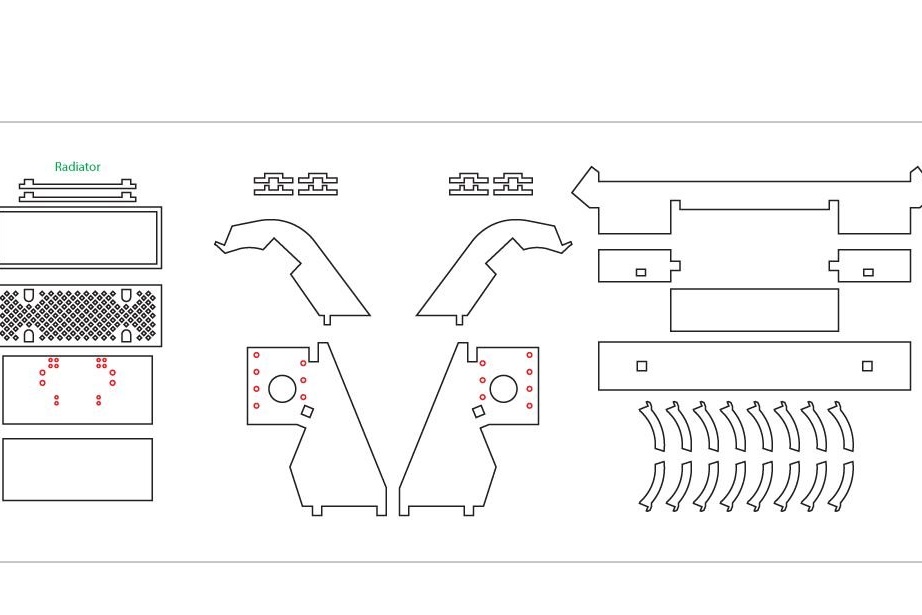
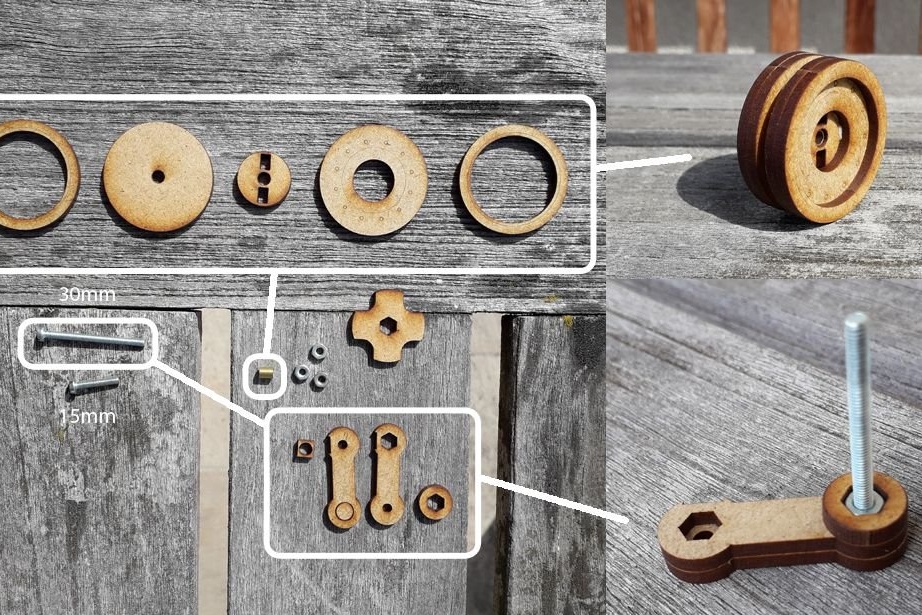
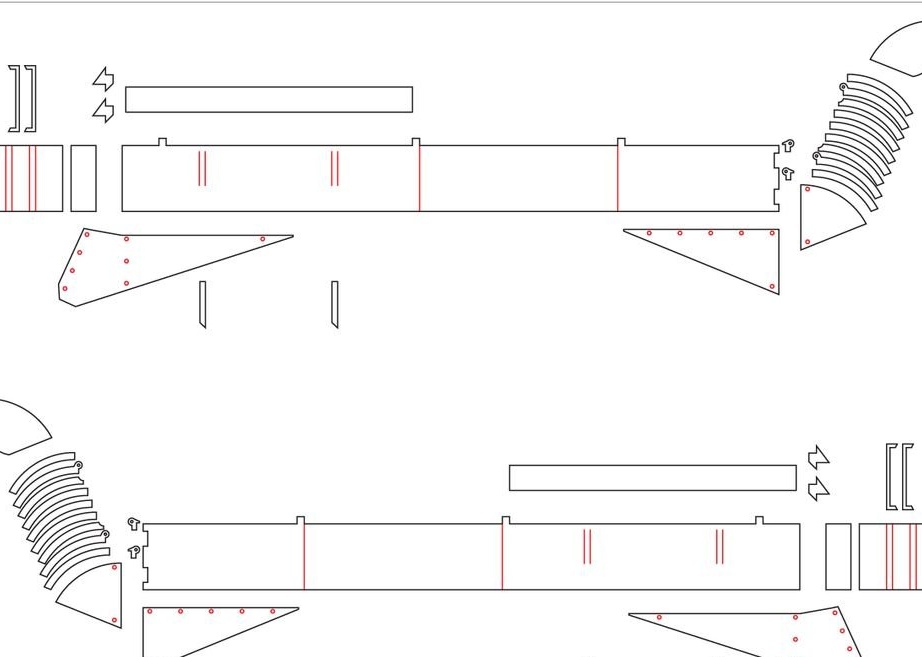
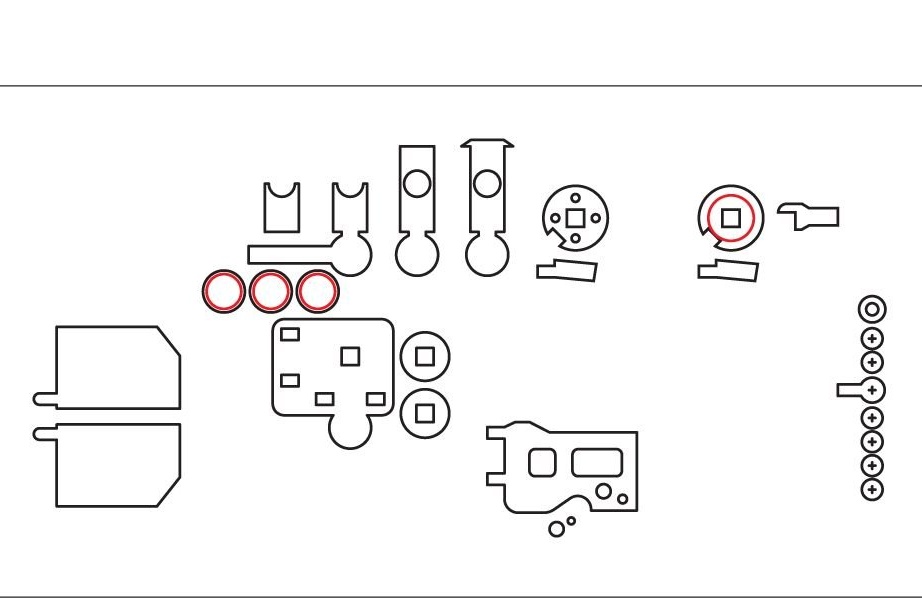
Tapausten yksityiskohdat leikataan laserleikkurilla, ja tiedostot ovat saatavilla osoitteessa tämä linkki.
Runko-osien lisäksi seuraavat
Työkalut ja materiaalit:
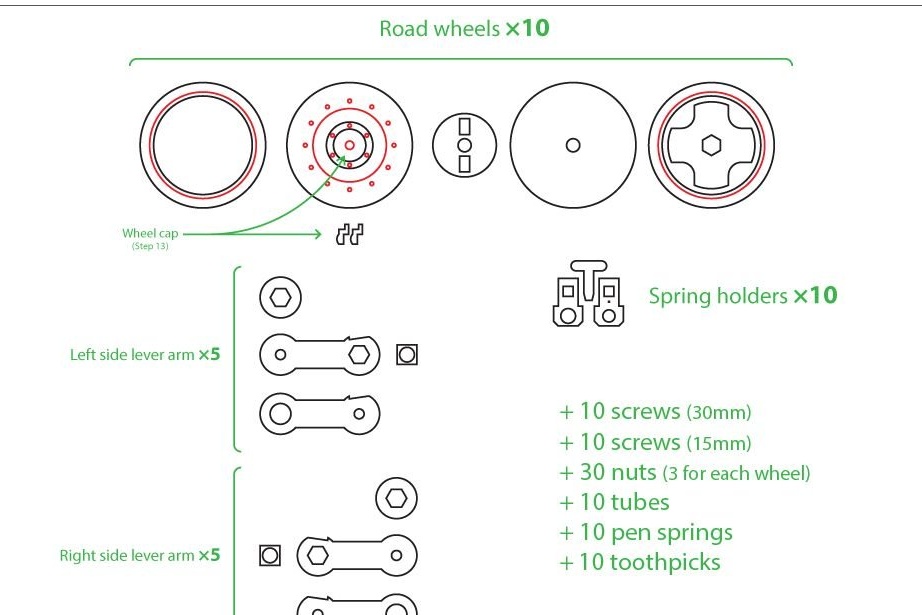
- Ruuvit Ø 3 mm:
-14 kpl 15 mm pitkä,
-10 kpl 25 mm pitkä,
-10 kpl 30 mm pitkä.
-Putket x20 Ø4 mm (sisähalkaisija Ø3 mm);
- metallilanka Ø 1 mm;
-Ø3 mm kierretanko;
-Jouset riipuksia Ø 4,5 mm ja pituutta 30 mm -10 kpl;
- M4-ruuvit 2 kpl;
-Zubochistki;
-Maketnaya aluksella;
Mikrokontrolleri ESP8266;
-Johtojohdot;
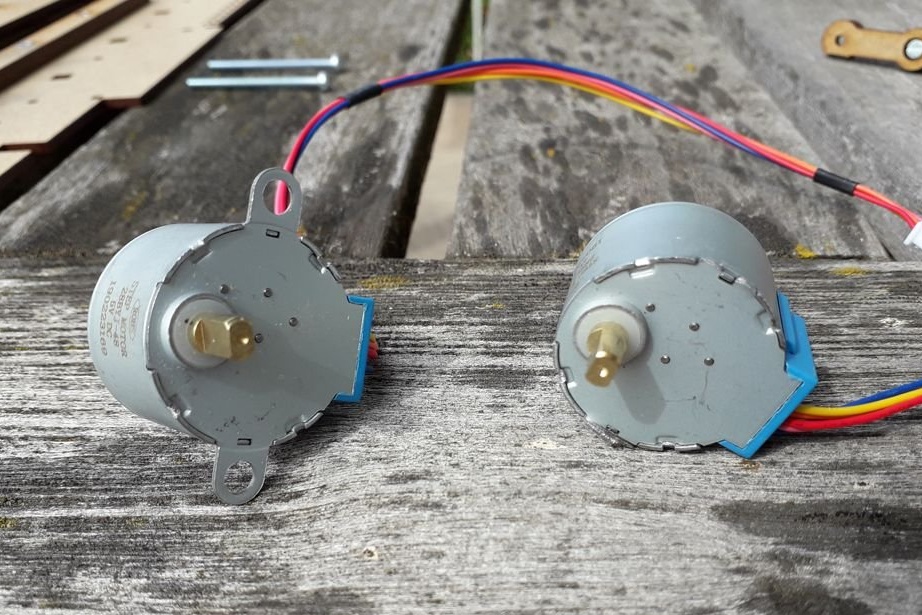
- 28BYJ-48 moottori ohjauskortilla - 2 kpl;
-Akku 5V;
Vaihe yksi: Katsaus
Tässä vaiheessa mestari paljastaa malli säiliö ja osoittaa myös linkki sivulle, jossa voit nähdä säiliön purettuna.
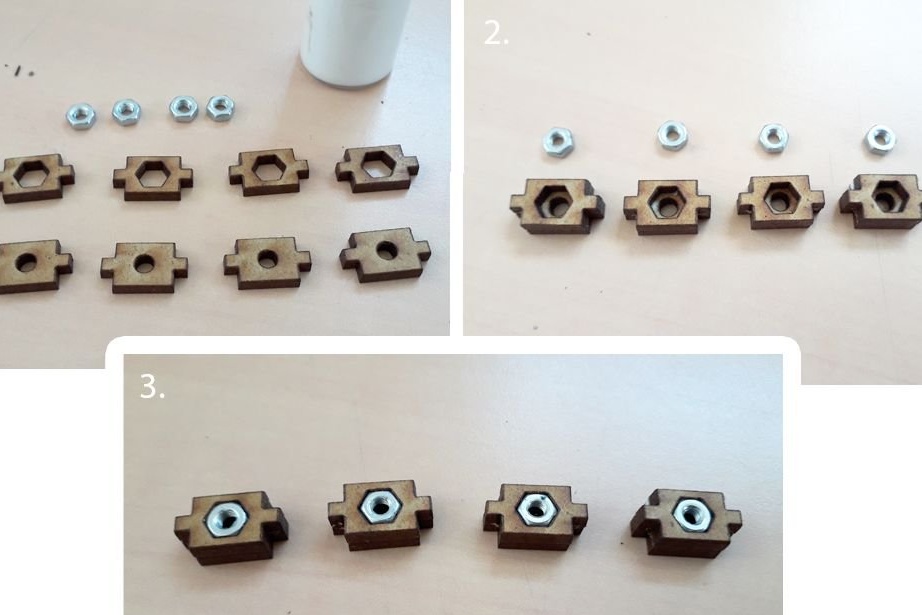
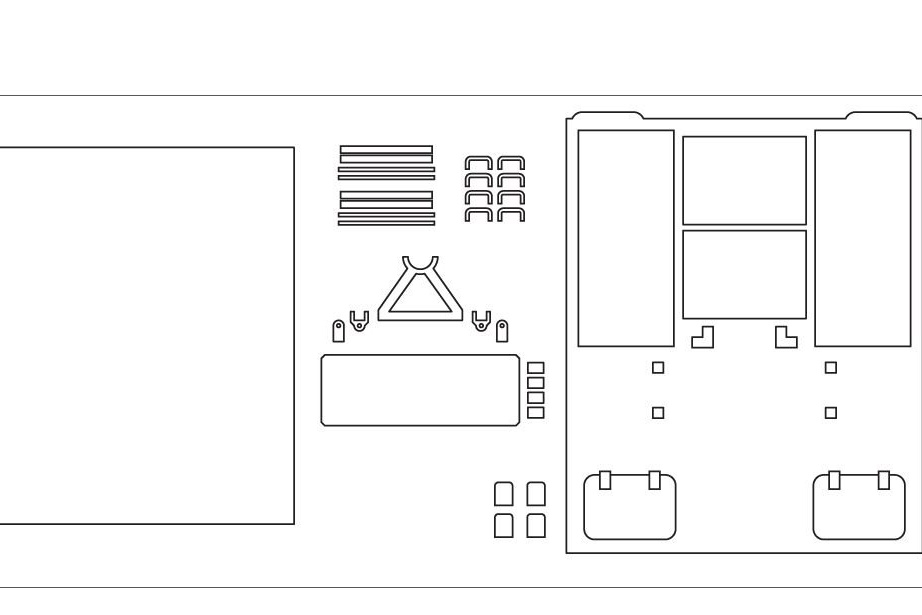
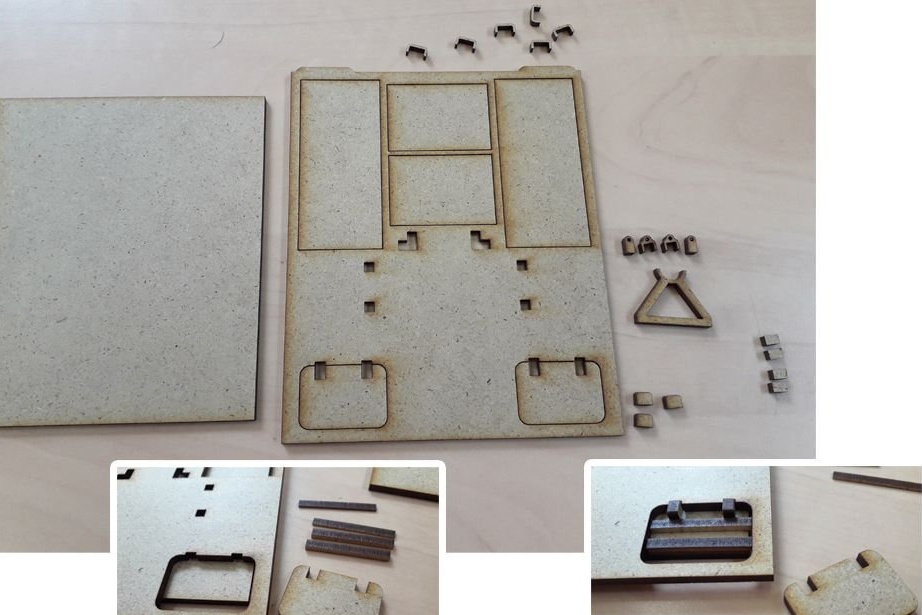
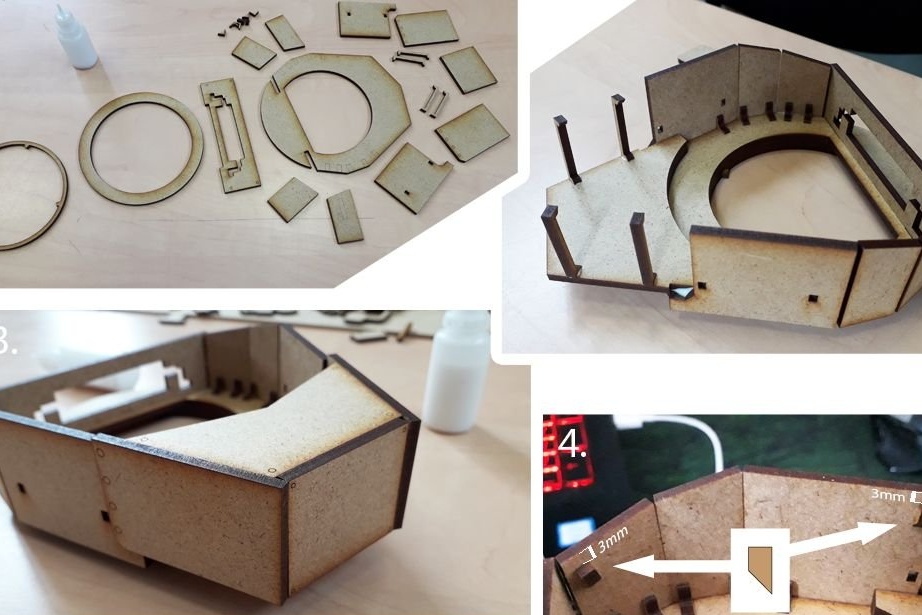
Vaihe toinen: Pohja
Mestari alkaa koota säiliön pohjasta. Asentaa mutterit kiinnikkeisiin. Kiinnitetään pohjan sivuille. Perustaa tuet. Asettaa toisen kerroksen.
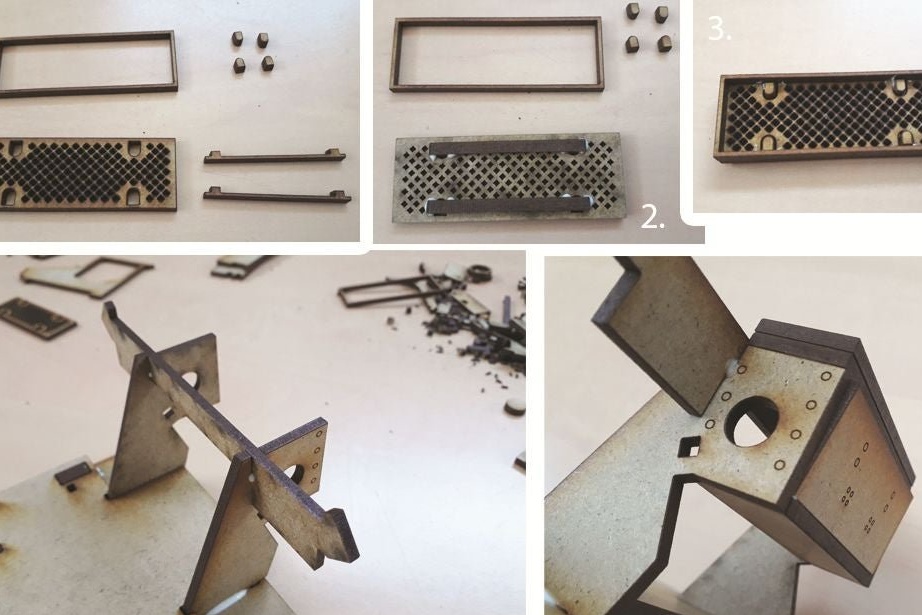
Kolmas vaihe: tapaus
Alkaa kehon kokoonpanoa. Kokoa jäähdyttimen ja takaosan.
Kerää eteen.
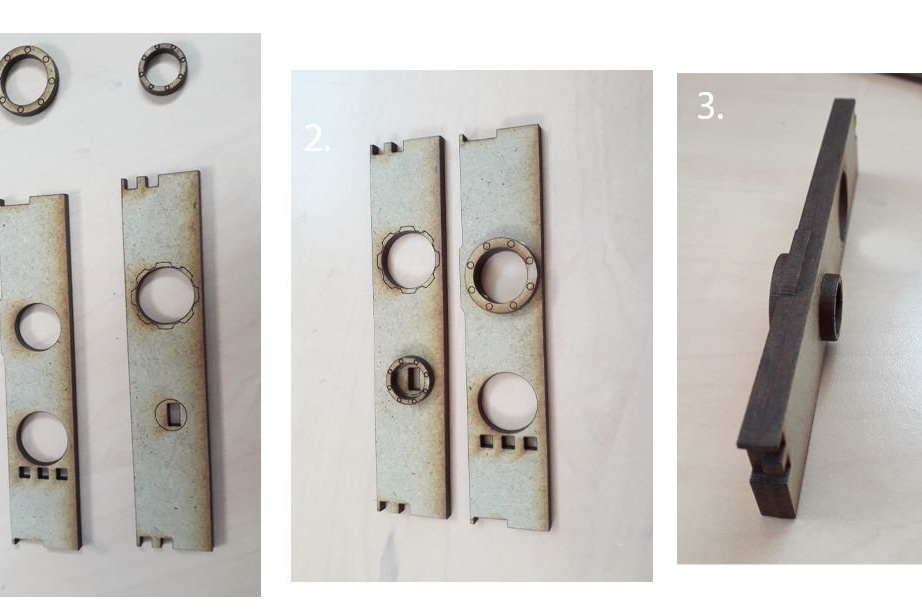
Etupanssarin asettamisen jälkeen runko on valmis. Muut osat ruuvataan kiinni tai liimataan siihen ilman liimaamista
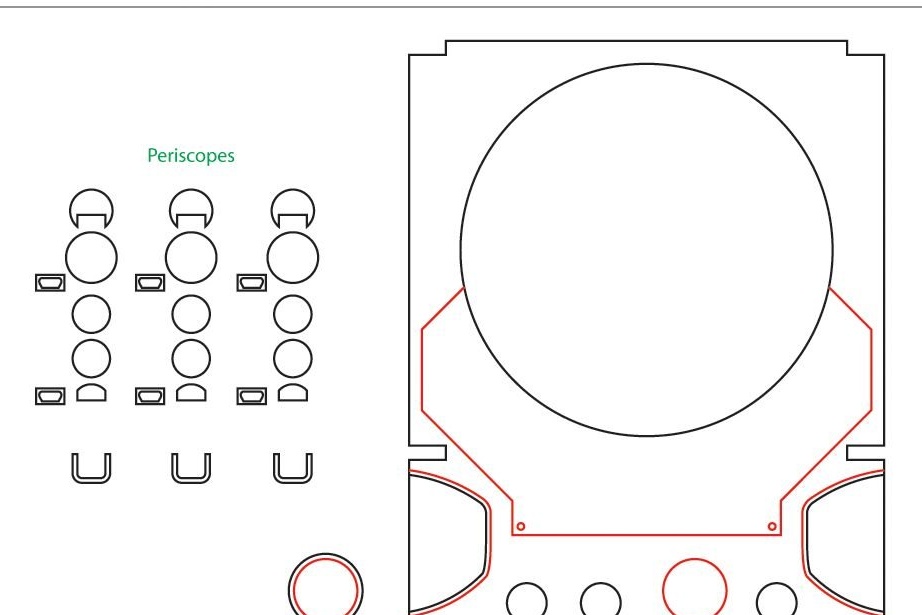
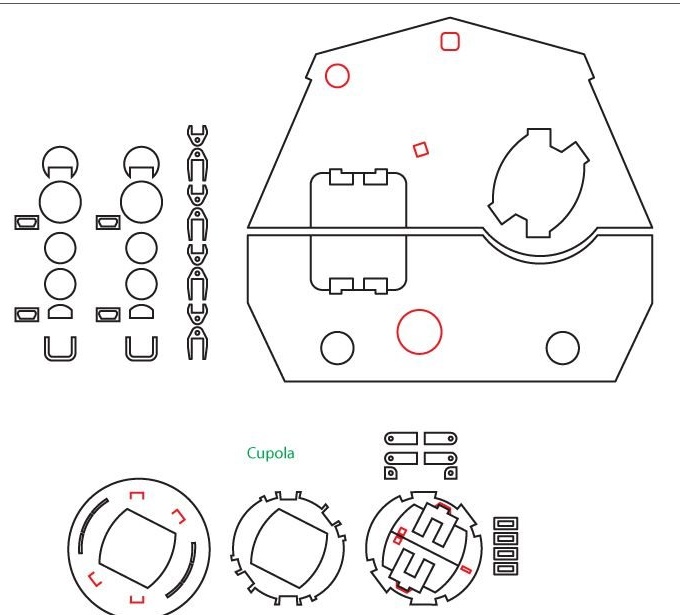
Vaihe neljä: Katto ja periskooppi
Tämä osa on irrotettava osa. Tämä tehdään pääsyä sisälle. Periskoopin vipu on asennettu katon päähän. Periskooppi sijoitetaan katolle, mutta ei tartu siihen.

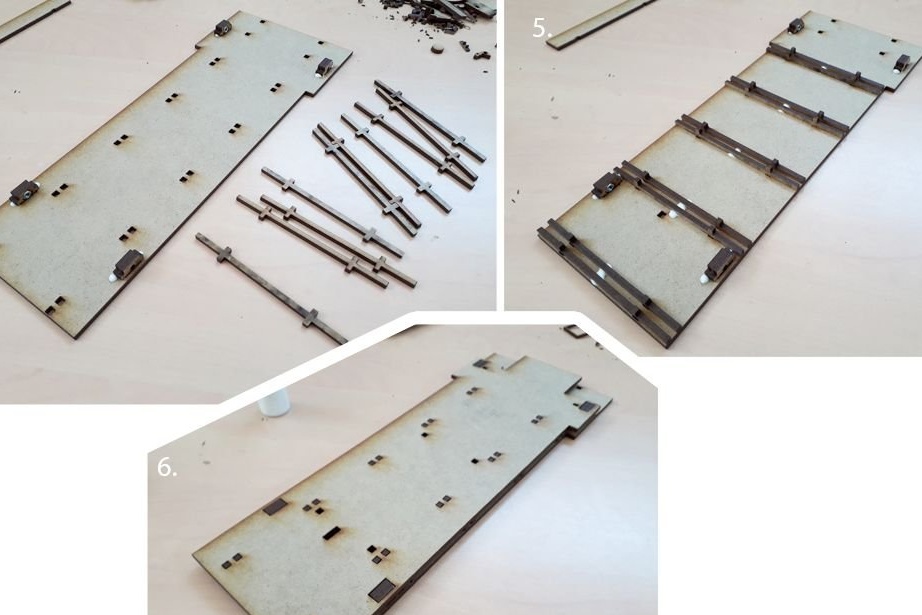
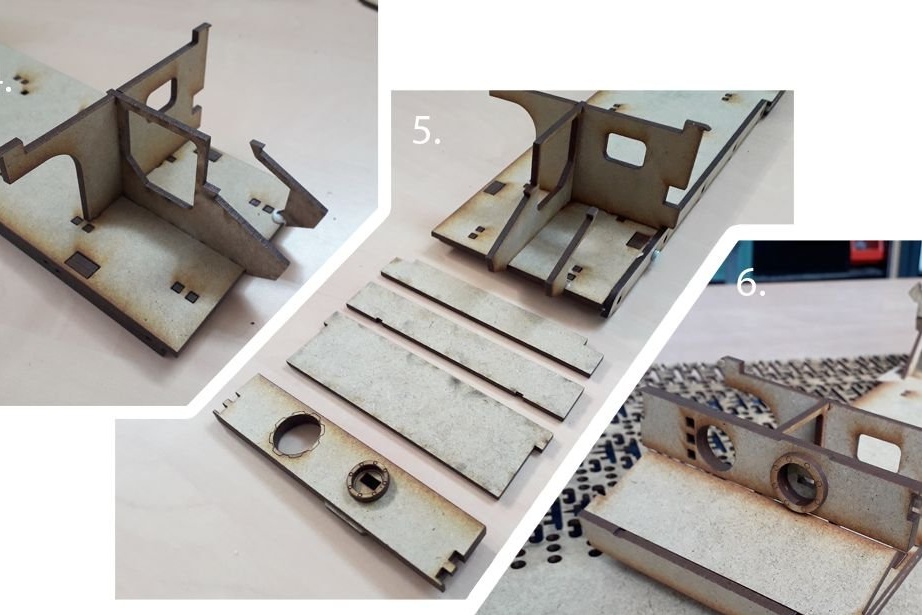
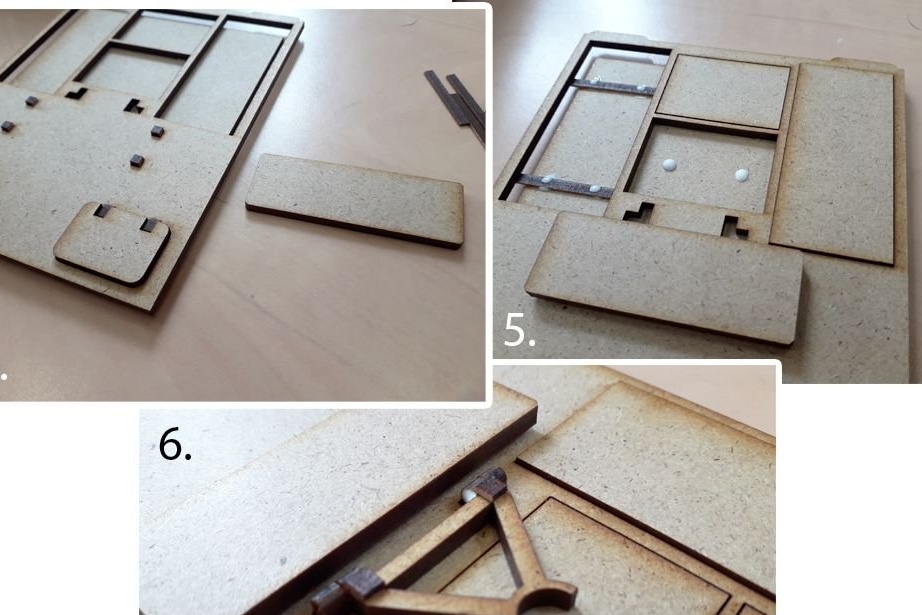
Vaihe viisi: sivu
Jousivarret on asennettu sivuseinämään. Se ruuvataan kaksoispohjaan 15 mm: n ruuveilla 4 mutterilla, jotka kiinnitettiin ensimmäisessä vaiheessa.



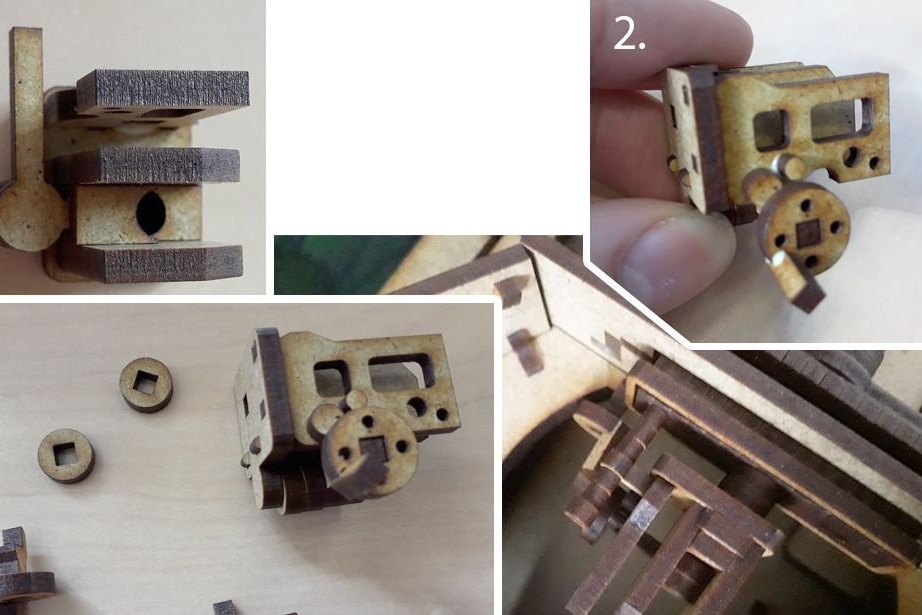
Vaihe kuusi: Jousitus
Kokoonpano ja asennus jousituskomponentit. Kaikki vaiheet heijastuvat yksityiskohtaisesti valokuvissa. Levitä vähän liimaa jousien päihin kiinnitystä varten. Jousien sisäpuolelle asetetaan hammastahnapalat. Tämä estää jouset aukeamasta.

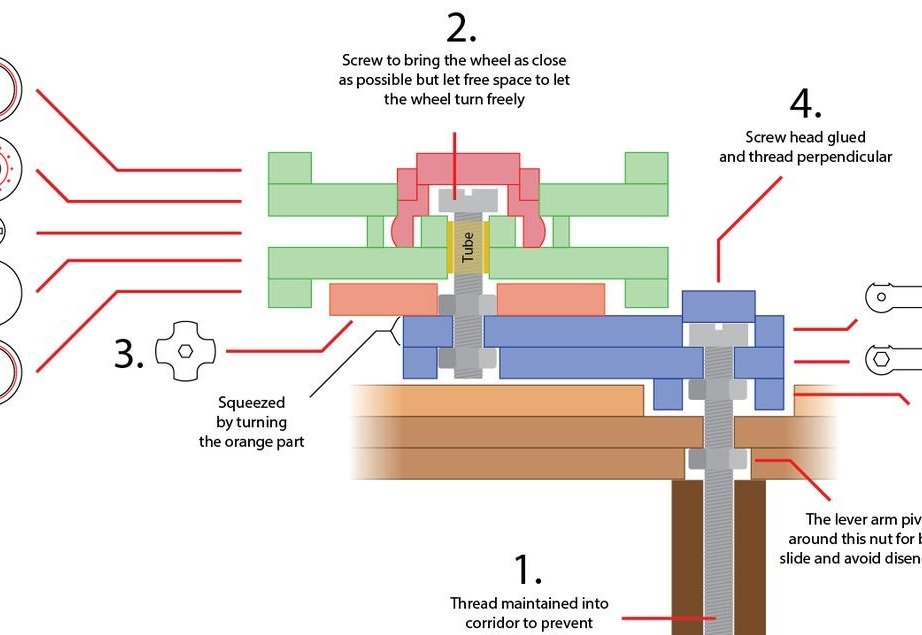
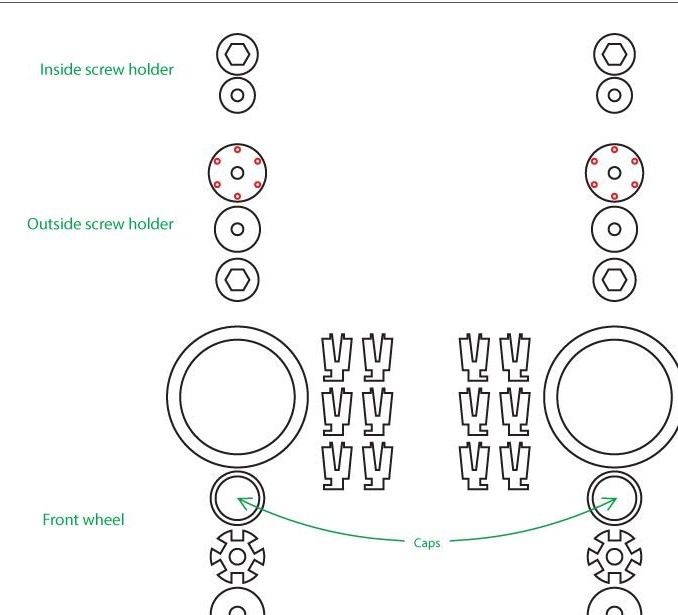
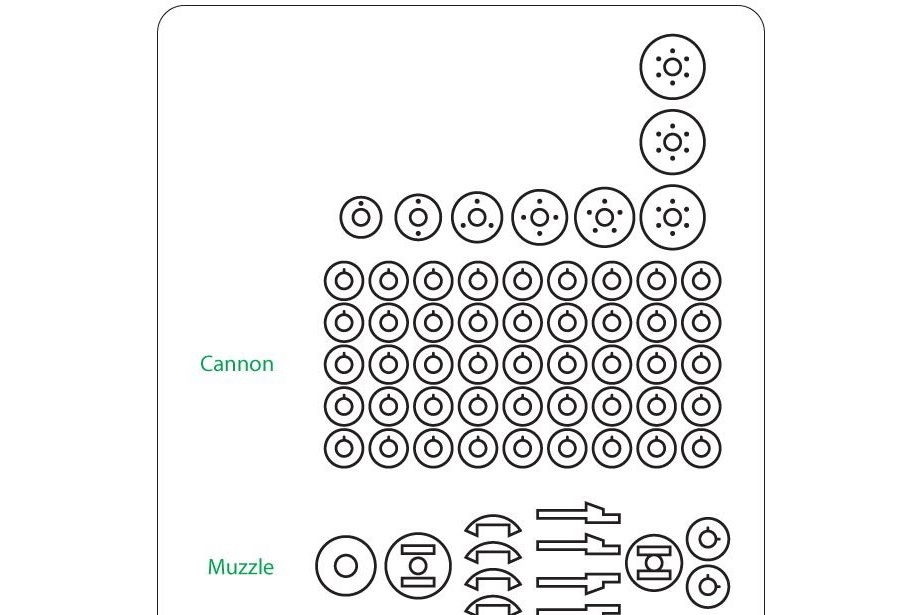
Kokoonpano ja asennus eturengas. Messinkiputki ja 20 mm: n ruuvi on asennettu pyörännavan sisään. Sitten napa suljetaan pistokkeella.

Kokoonpano ja asennus pikemminkin pyörä.


Kokoonpano ja asennus vetopyörät. Nämä pyörät kytketään säiliön säiliöön asennettuihin moottoreihin.
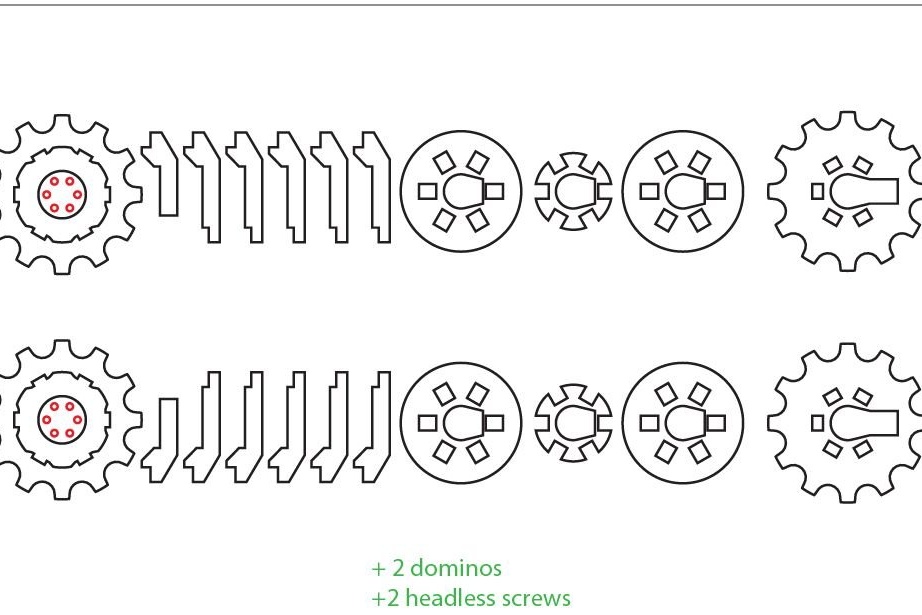
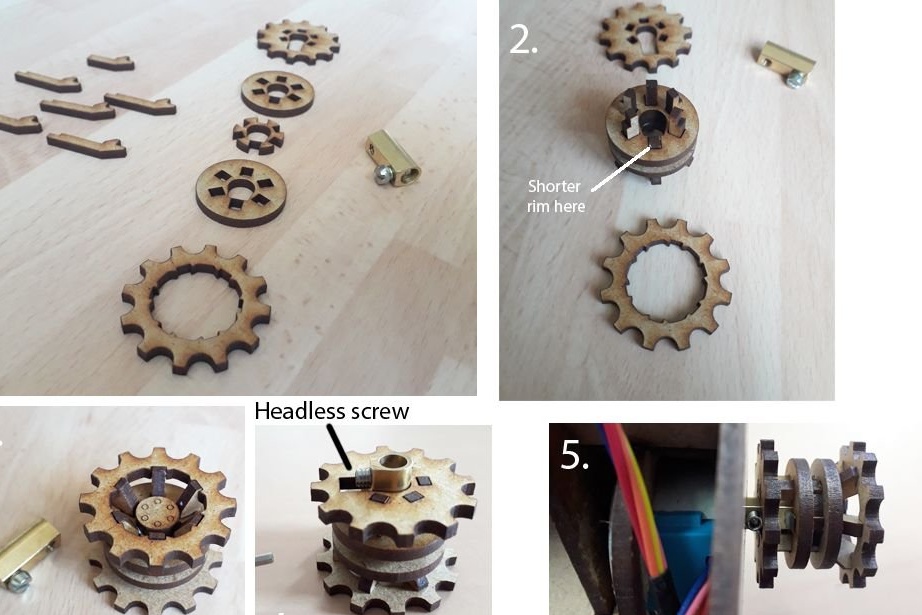
Asentaa tulpat pyörille.

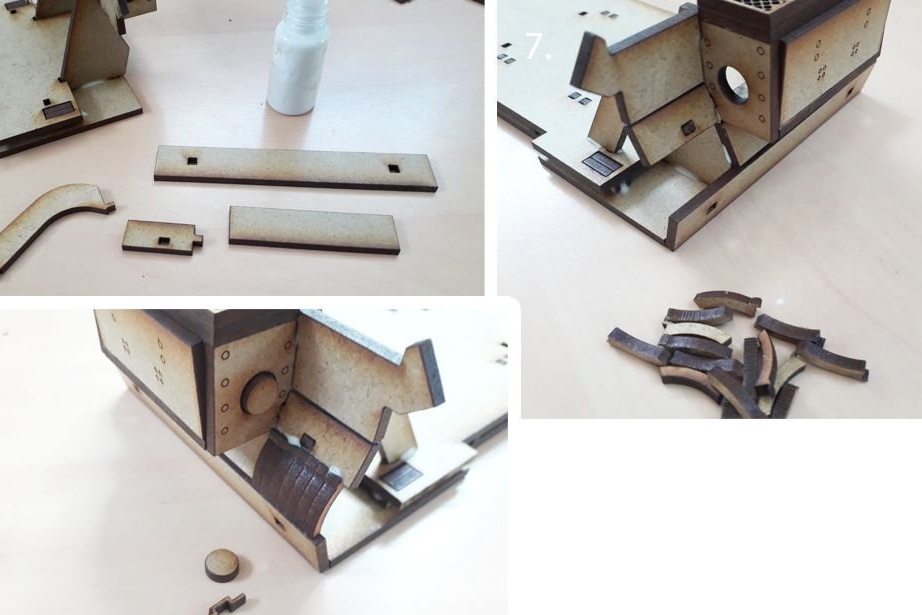
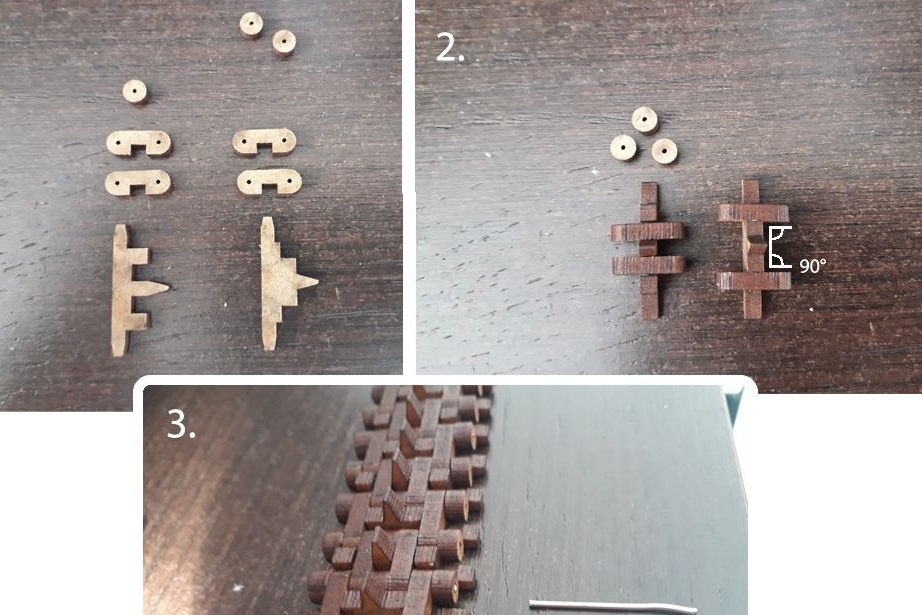
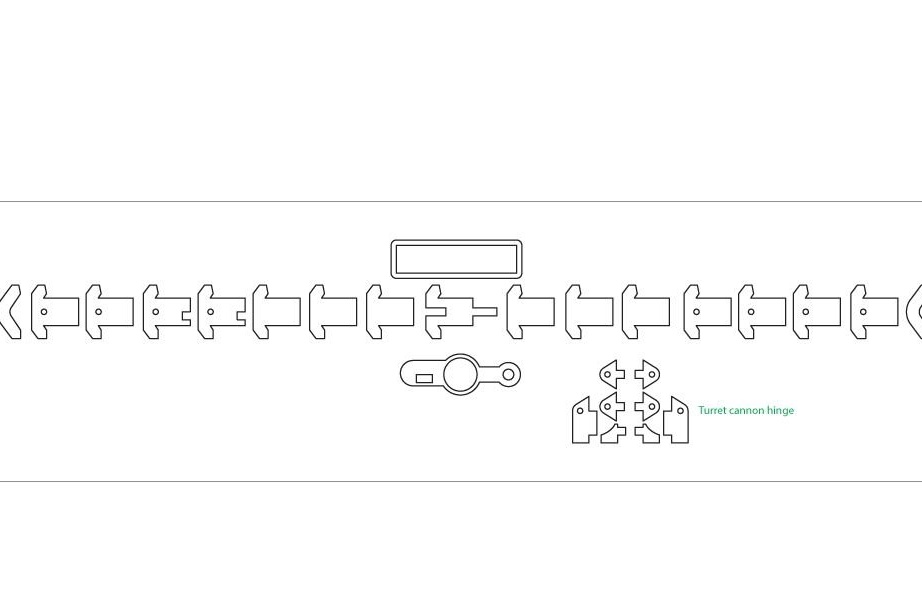
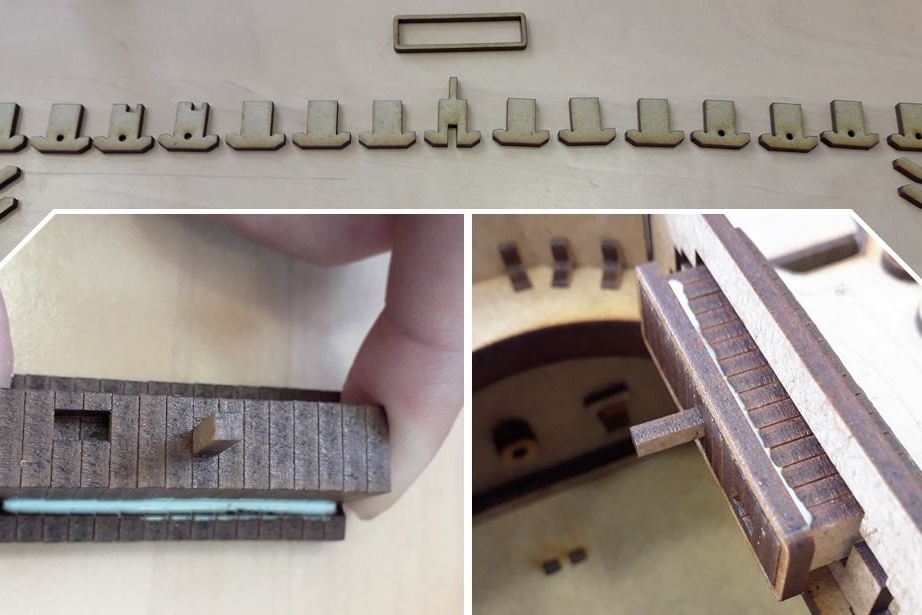
Vaihe seitsemän: Seuraa
Kerää toukkaratoja. Kiskot kiinnitetään ohuella langalla. Langan sivuille on kiinnitetty korkkeilla.
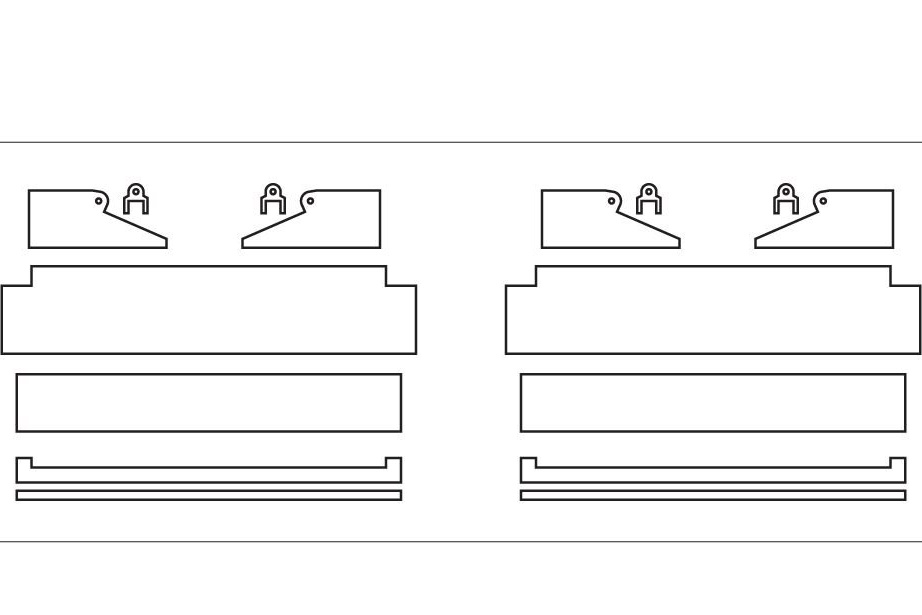
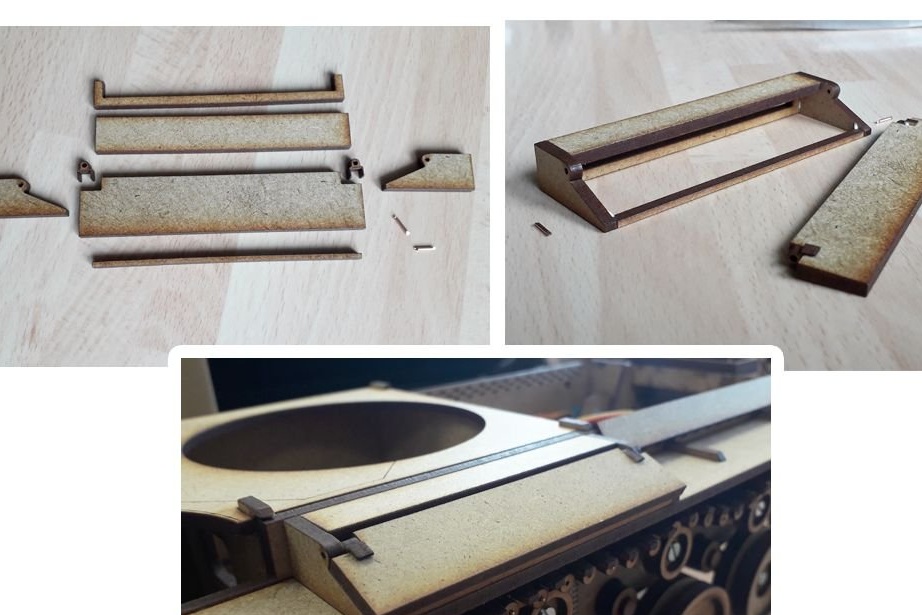
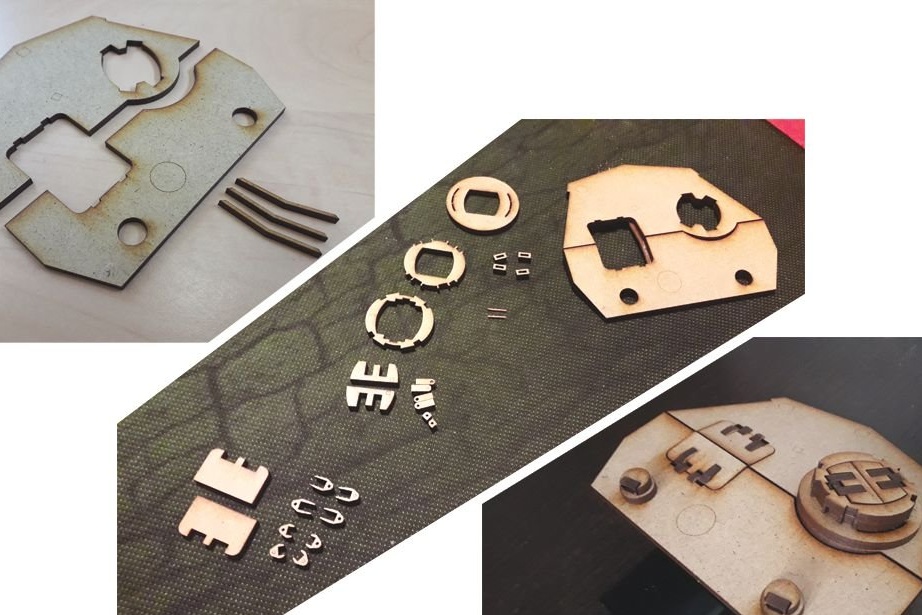
Kahdeksas vaihe: Linsuoja ja laatikko
Asentaa suojat. Läpien etuosa on liikutettavissa ja voidaan nostaa.


Asettaa laatikon. Silmukoina lankapalat asennetaan.
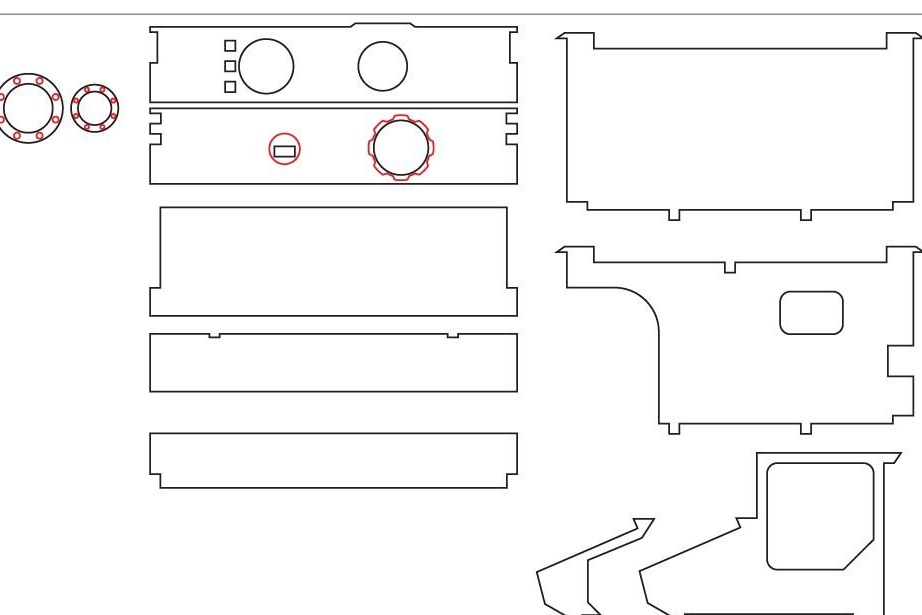
Vaihe yhdeksän: Takaosa
Tämä osa sijaitsee tornin takana ja se kattaa koko elektroniikka.
Vaihe kymmenen: Torni
Kerää tornin yläosaan ja sivuseiniin.
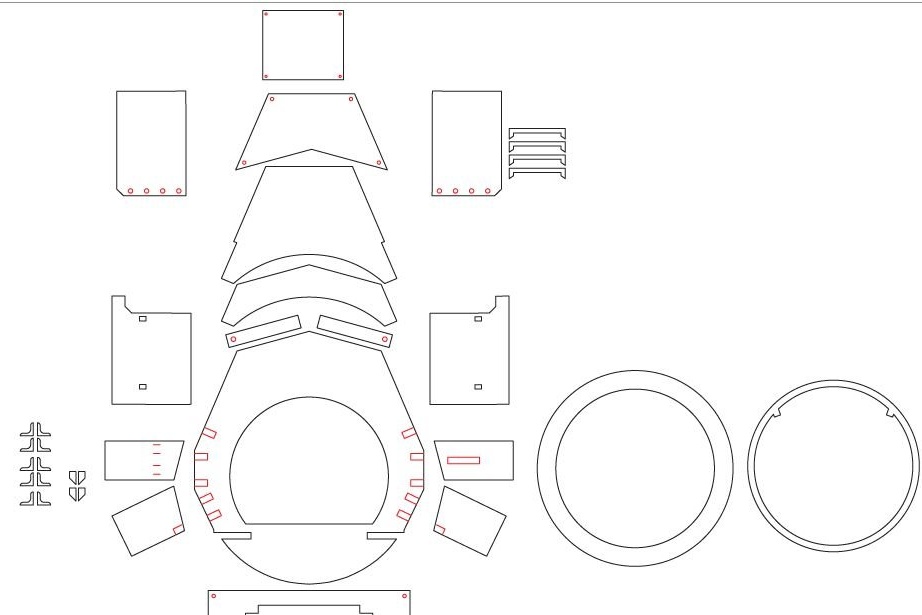
Liimaa aseen kiinnikkeen.
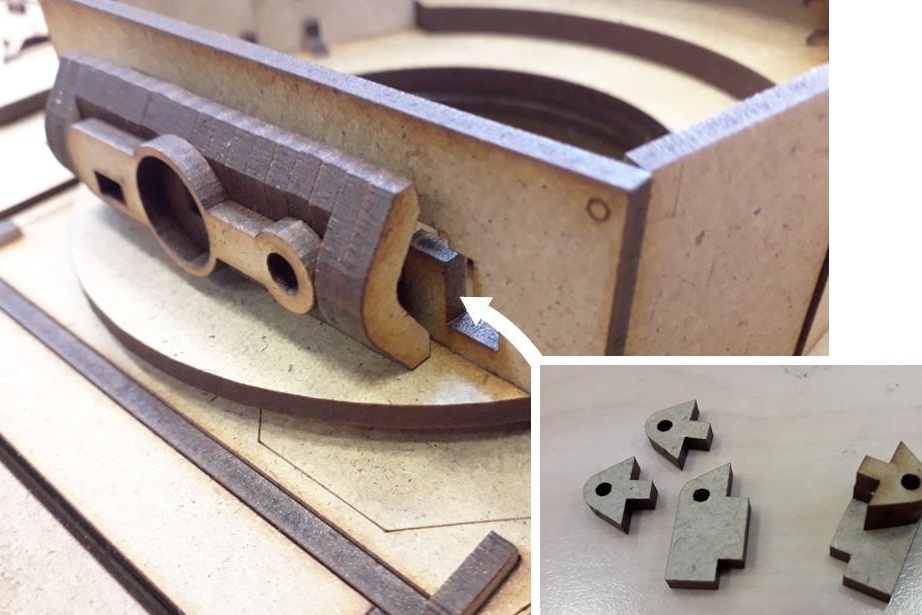
Asettaa sisäisen kiinnityksen ja pistoolin ohjausmekanismin.

Vaihe yksitoista: ase
Kerää aseen .Pääasia on metallitanko. Loput yksityiskohdat on pakattu siihen.

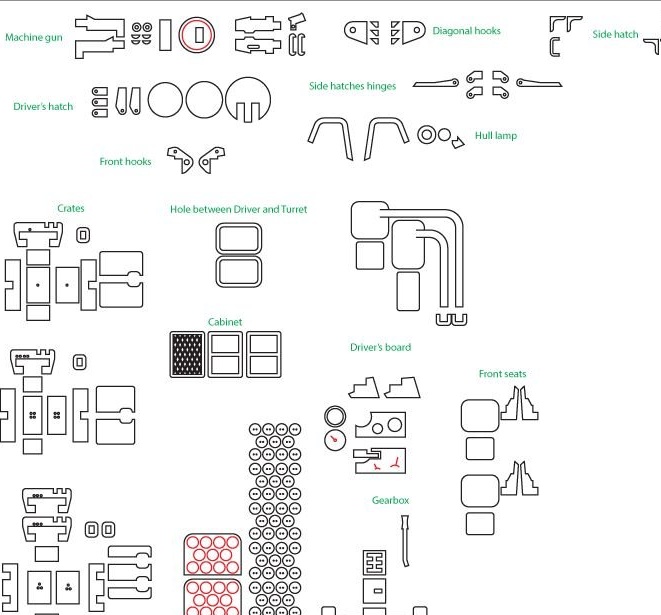
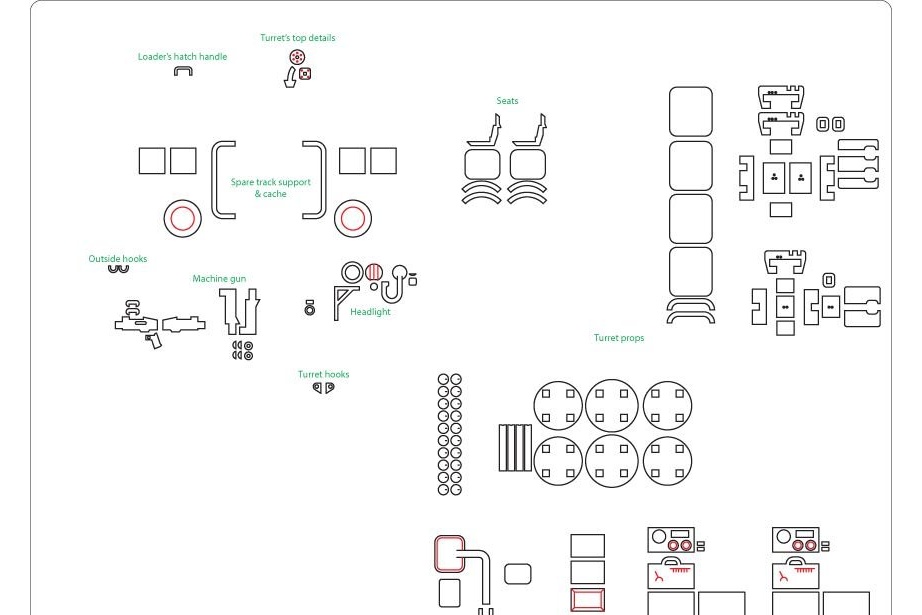
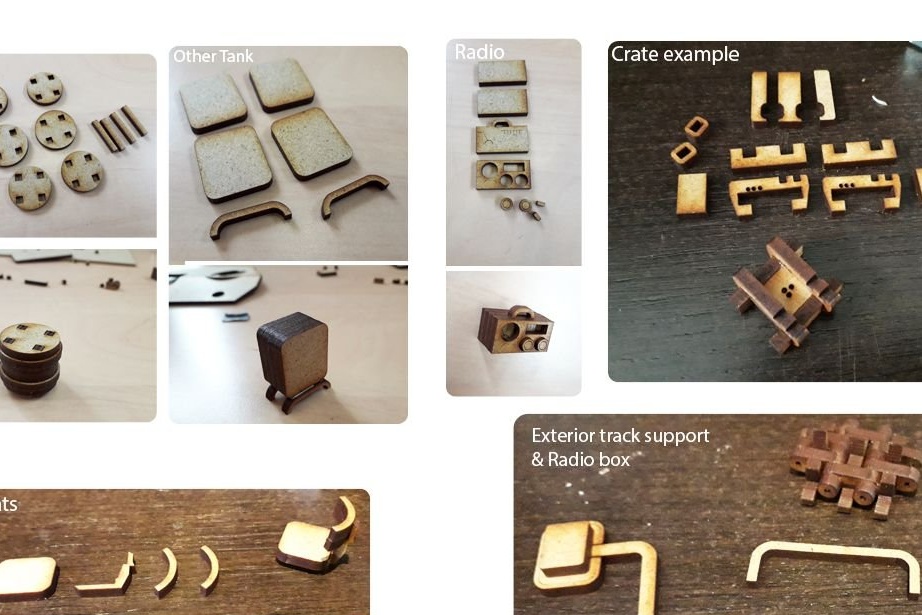
Vaihe kaksitoista: pienet yksityiskohdat
Kiinnittää säiliön pienet osat.
Vasemmalla puolella on istuin ja konekivääri, konekiväärin tynnyrin ulkopuolella.
Aivan kuljettajan istuimella: istuin, hallintavivut ja polkimet, kattoluukku.
Ulkopuolella: koukut, ajovalot, laatikot, ammukset, vaijeri jne.
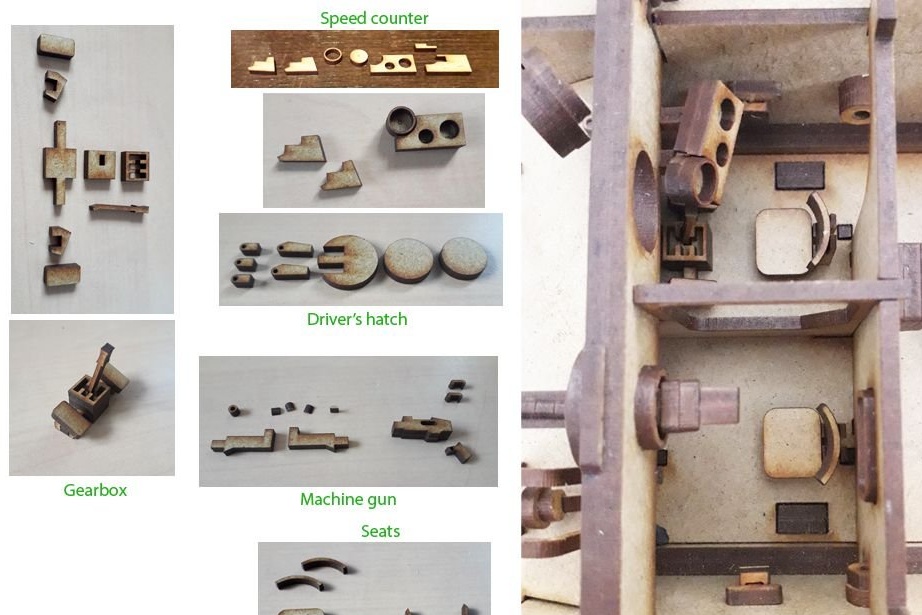

Torniin on kiinnitetty veden alla oleva säiliö, tornin sisällä oleva radiopuhelin.

Kolmetoista vaihe: Elektroniikka
Asentaa moottorit. Suorittaa elektronisen osan asennuksen kaavion mukaisesti.
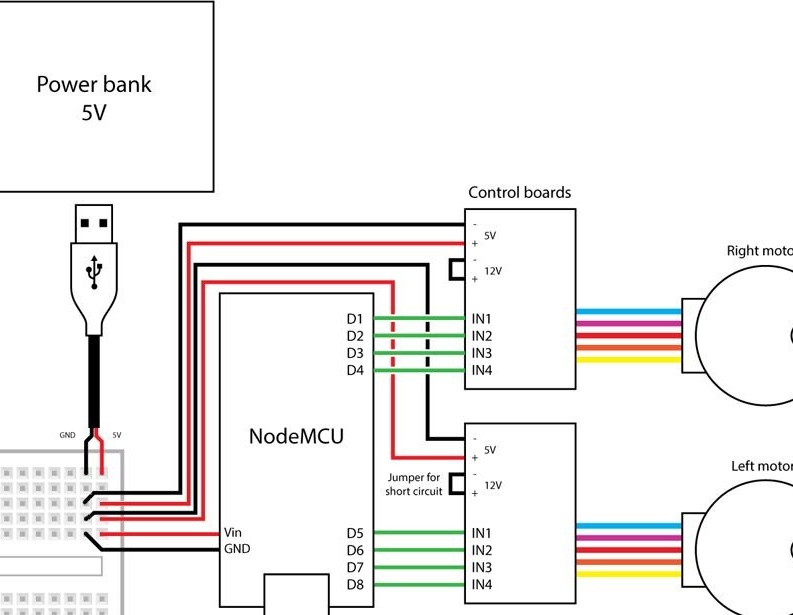

Langattomaan ohjaukseen valitsin NodeMCU-ohjaimen. Malliä hallitaan NodeMCU: n ja Blynk-sovelluksen (saatavana Android / iOS) kautta. Tämä sovellus tarjoaa täysin muokattavan HUD: n hallitaksesi mitä tahansa Työläs tai iOS-puhelin WiFi-yhteyden kautta.
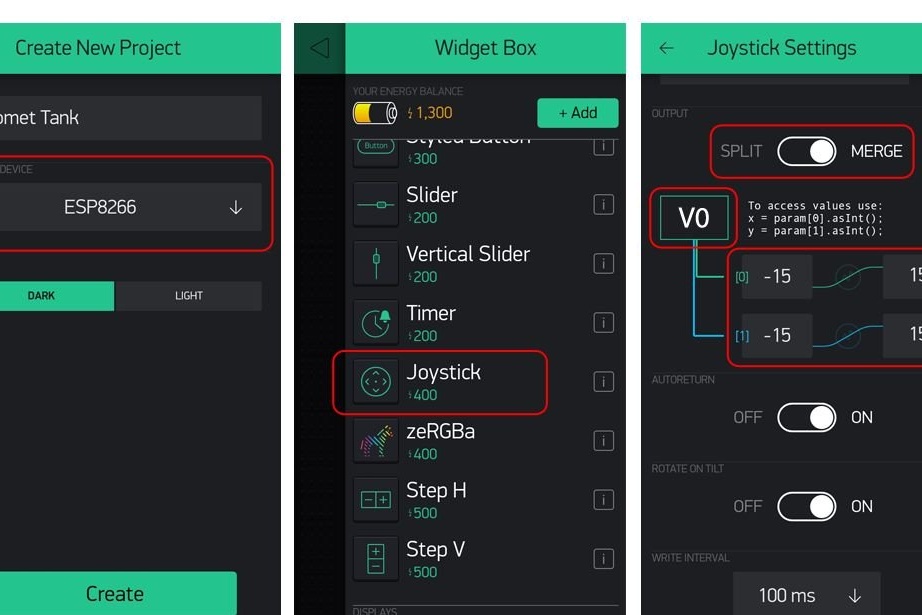
Joten sovelluksen asentamisen jälkeen ensimmäinen asia on luoda tili.
Luo uusi projekti ja määritä ESP8266 (NodeMCU-siru) mikro-ohjaimeksi ja aseta WiFi-tila.
Heti kun näet HUD-laitteen, luo ohjaussauva. Lähetä ohjaussauvan tiedot solmun virtuaaliseen nastaan V0.
Kun olet luonut ohjaussauvan, napsauta sitä avataksesi sen asetukset. Aseta kohdissa X ja Y alue -15-15.
Asenna kirjastot.
Lataa ensin Stepper2-kirjasto täältä: https://github.com/udivankin/Stepper2
Tämä kirjasto on hyvä vaihtoehto halpoille askelmoottoreille, kuten isäntä käyttää. Se hallitsee paremmin moottorin vaiheita ja tarjoaa paremman vääntömomentin. Kun olet ladannut .zip-tiedoston, asenna se Arduino-ohjelmistosta: Sketch> Include Library> Add .ZIP Library ... ja valitse se.
Sitten, jos et ole koskaan aiemmin väläyttänyt NodeMCU: ta, tarvitset tietokoneen tunnistaaksesi sen. Arduino IDE: ssä on hallituksen johtaja, johon oikeat ohjaimet on asennettu.
Kopioi seuraava rivi:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonAvaa asetukset ja liitä ne URL-osoitteisiin. Tallenna asetukset ja siirry ohjaimen hallintaohjelmaan kohtaan Työkalut> Lauta> Paneelien hallinta. ESP8266-kortin on oltava läsnä luettelon lopussa. Ohjattu toiminto valitsi version 2.5.0 IDE: llä 1.8.9.
Tarvitset myös Blynk-kirjaston, joka löytyy luonnoksesta Sketch> Sisällytä kirjasto> Hallinnoi kirjastoja ... ja etsi sitten Blynk hakukenttään.
Siirry projektiasetuksiin ja lähetä tunnus osoitteeseen, joka on iso merkkijono, jonka avulla puhelimesi tunnistaa NodeMCU, kun se otetaan käyttöön. Kopioi äskettäin vastaanotetuista viesteistä merkki ja liitä se automaattiseen taulukkoon.
Nyt voit asentaa laiteohjelmiston.
Comet.ino
Kaikki on valmis, nyt voit nauttia työstäsi.