


Ensin ymmärretään ero oktokopterin ja nelikopterin välillä. Nimen lisäksi tämä on myös kiskoilla olevien moottorien lukumäärä. eli nelikopteri - neljä moottoria, oktokopteri - kahdeksan. Tämä pätee myös heksakopteriin - kuusi, trikopteriin - kolmeen jne. Jos ohjaimet ovat esimerkiksi neljä (X) ja kahdeksan moottoria, niin tämä on silti oktokopteri, mutta nimeltään X8. eli neljällä kiskolla, kahdeksan moottoria.
Periaatteessa numerot, joilla on etuliite koptereille, ovat lentokoneita, joita ohjataan käyttäjän radiosignaalilla maasta. Intialainen opiskelija päätti mennä pidemmälle ja valmistaa oktokopterin, joka pystyy nostamaan ihmisen ilmaan. Tämä ei ole halpa projekti. Rahoituksen otti vastaan oppilaitos.
Työkalut ja materiaalit:
- moottorit Turnigy CA170 -moottorit - 8 kpl;
- Ohjain Turnigy Fatboy 300A - 4 kpl;
- Turnigy 200A HV -ohjain - 4 kpl;
- Lähetin Hitech XG11 Tx / Rx;
-Lento DJI A3 Pro -ohjain;
-Lennonohjain DJI Naza M V2;
- Akku Zippy 22,2V 5Ah 40C LiPo - 16 kpl;
- Laturi 6s LiPo-laturi;
-XT150-liittimet - 50 kpl;
-Wire 8AWG Sillicone Wire - 10 metriä;
-Servoprivody;
-Pallot squashin pelaamiseen (Squash Balls) - 4 kpl;
- MDF-arkki 25 cm x 50 cm x 2 mm;
-Drel;
- kulmahiomakone;
- ruuvimeisselit;
- jakoavaimet;
- Pihdit;
-Laserleikkuri tai vannesaha;
-Valikoima pähkinöitä 4, 6 ja 8 mm, pultteja ja aluslevyjä;
-Gorelka;
-LED LED;
-Juotto tarvikkeet;
- 2 ja 3 mm teräslanka;
-Ruuvikruuvi 100mm - 200mm - 40 kpl;
- 40 koukkua ja silmäpultti;
-Tachometer Turnigy RPM;
-Tehoanalysaattori (Turnigy wattimittari / vahvistin);
-Akun ohjain;
- alumiiniprofiiliputket;
-Alumiinilevy;
- kaksipuolinen teippi;
-Hitsaus kone;
-Ruletka;
-Tietokone Fusion 360: lla;
- Akku 11,1 V 2200 mAh LiPo 30C;
- tiheä kangas 1,2 m x 1,2 m;
- Vahva lanka ja neula;
-Vyön turvallisuus;
Vaihe yksi: Suunnittelu
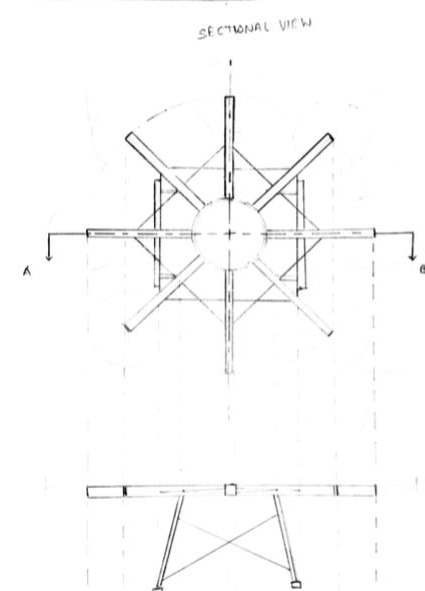
Miehitettyä oktokopteria kehitettäessä päällikkö harkitsi erilaisia konfigurointivaihtoehtoja, sekä X8, H ja T, mutta päätteli, että optimaalisin, monista syistä, olisi oktokopterin suunnittelu perinteisen kaavion mukaan.
Sitten oli tarpeen selvittää, minkä koon oktokopterin tulisi olla. Laskelmat tehtiin esimerkkinä Fusion 360: n CAD-malleista. Olemassa olevat ruuvit otettiin huomioon laskelmissa. Optimaaliseksi osoittautui halkaisija kolme metriä, korkeus yksi metri. Sisäkori, henkilölle 55x55 cm.

Vaihe toinen: Ostoskori
Runko hitsattiin neliömäisestä alumiiniprofiilista, jonka hylly oli 50 mm ja seinämän paksuus 2 mm.
Profiili leikattiin ja hitsattiin. Saumat puhdistetaan.



Vaihe kolme: Levyjen kiinnitys
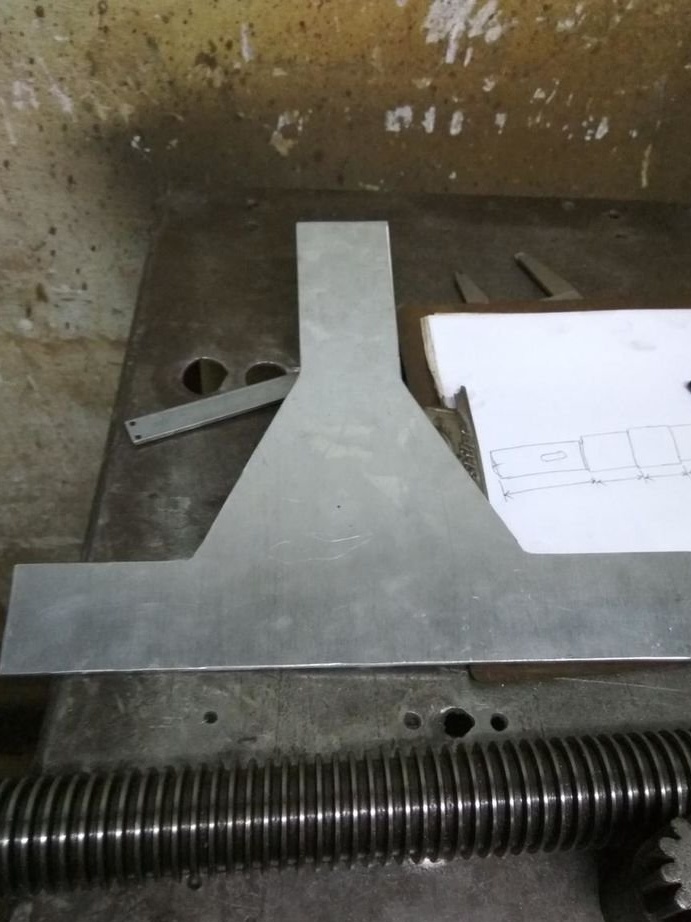
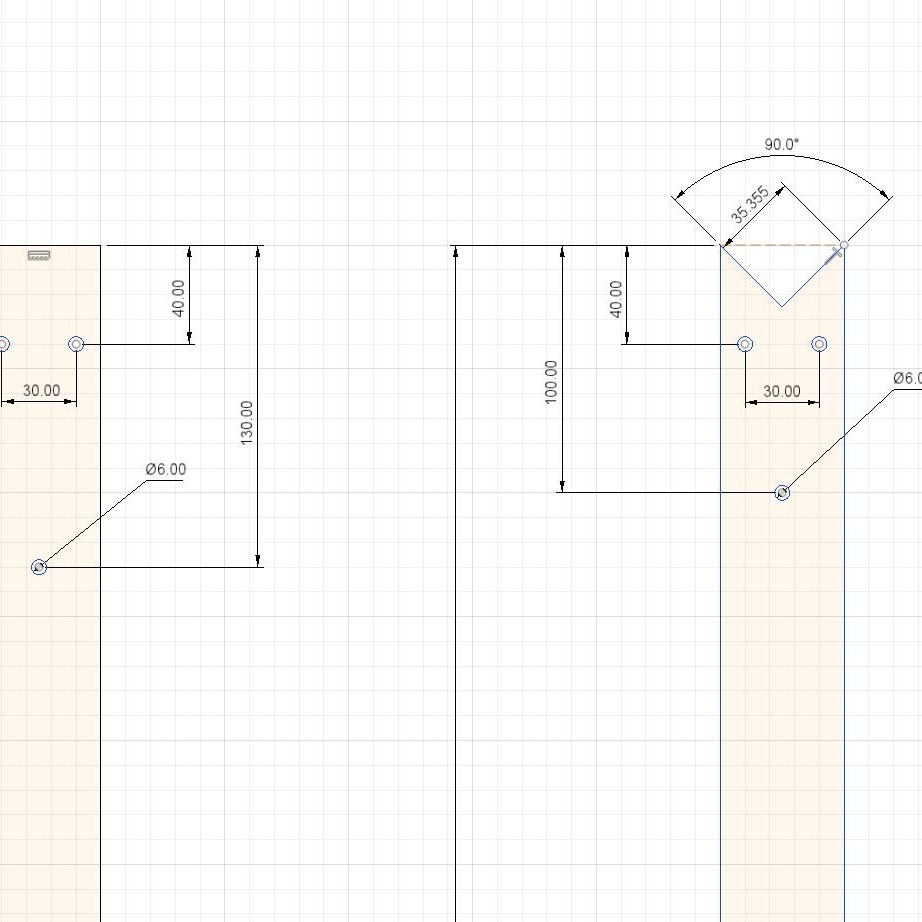
Kiinnikkeissä päällikkö käytti 1,5 mm alumiinilevyjä. Suluissa on yhteensä kahdeksan, nurkassa neljä ja kehyksen keskellä neljä. Käsivarren ja tukiosan pituus on molemmat 15 cm. Kiinnikkeet on suunniteltu Fusion 360 -malliin. Levyt leikattiin jyrsimellä. Asennusreiät porataan niihin. Sitten kiinnikkeet hitsataan runkoon.






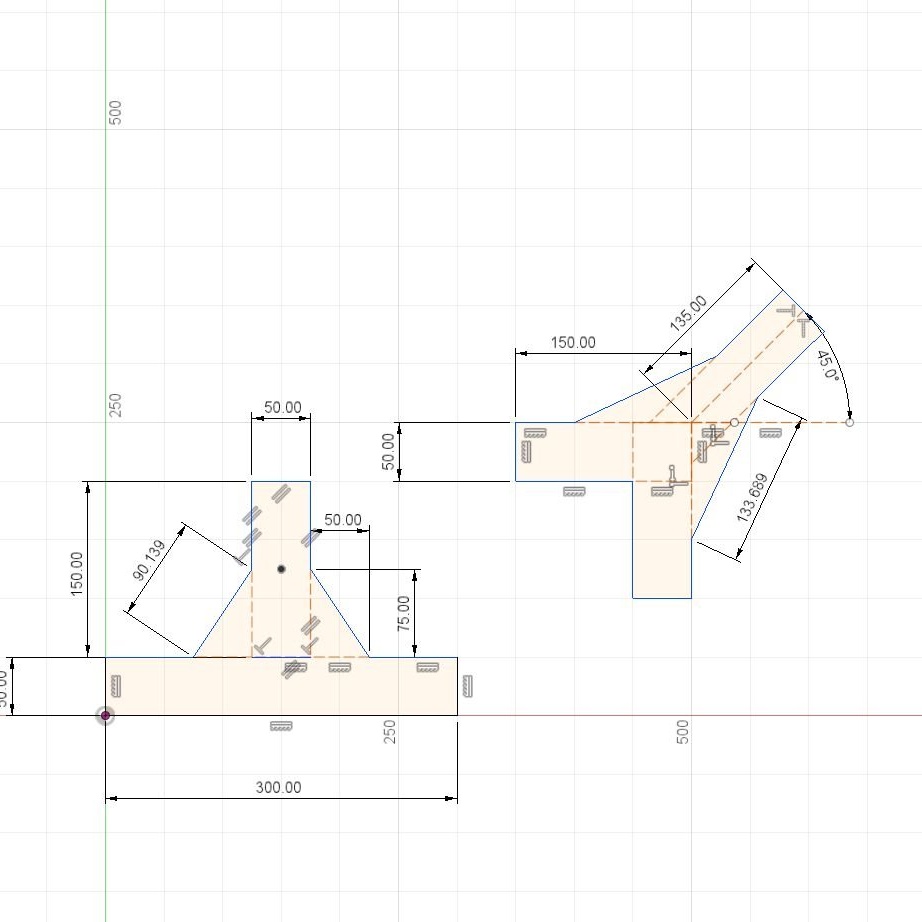
Vaihe neljä: Kuljettajan profiili
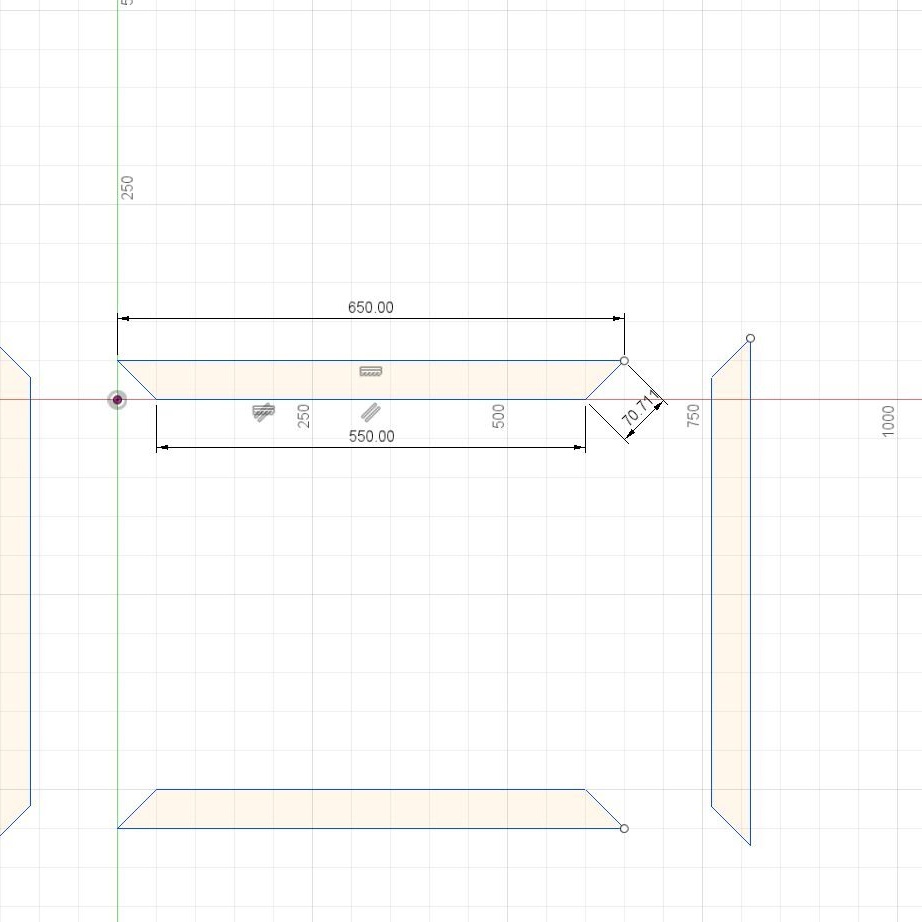
Nämä profiilit on kiinnitetty kiinnikkeisiin ja moottorit on asennettu niiden päihin. Profiilit ovat neliömäisiä, 50 x 50 cm, ja niiden pituudet ovat erilaiset. Kulmiin on kiinnitetty 112,5 cm pitkät profiilit, sivuilta profiili 125 cm, leikkaus tehty kulmaprofiileista 45 asteen kulmassa. On välttämätöntä, että sen päätypinta on kulman tason vieressä.
Profiilien kiinnittämiseksi kiinnittimiin isäntä poraa reikät pultteihin.




Vaihe viisi: Moottorin kiinnitys
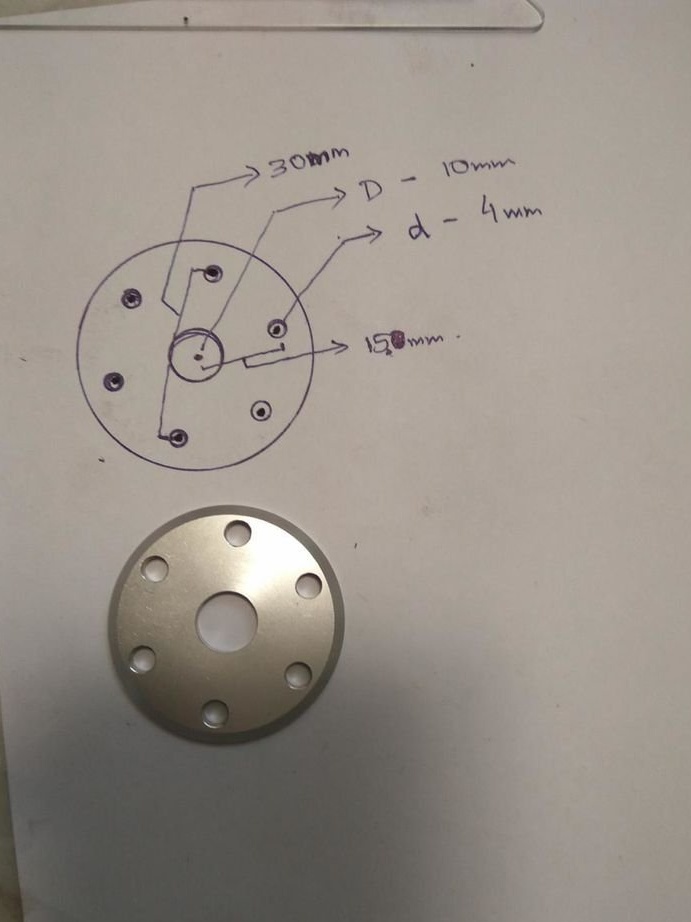
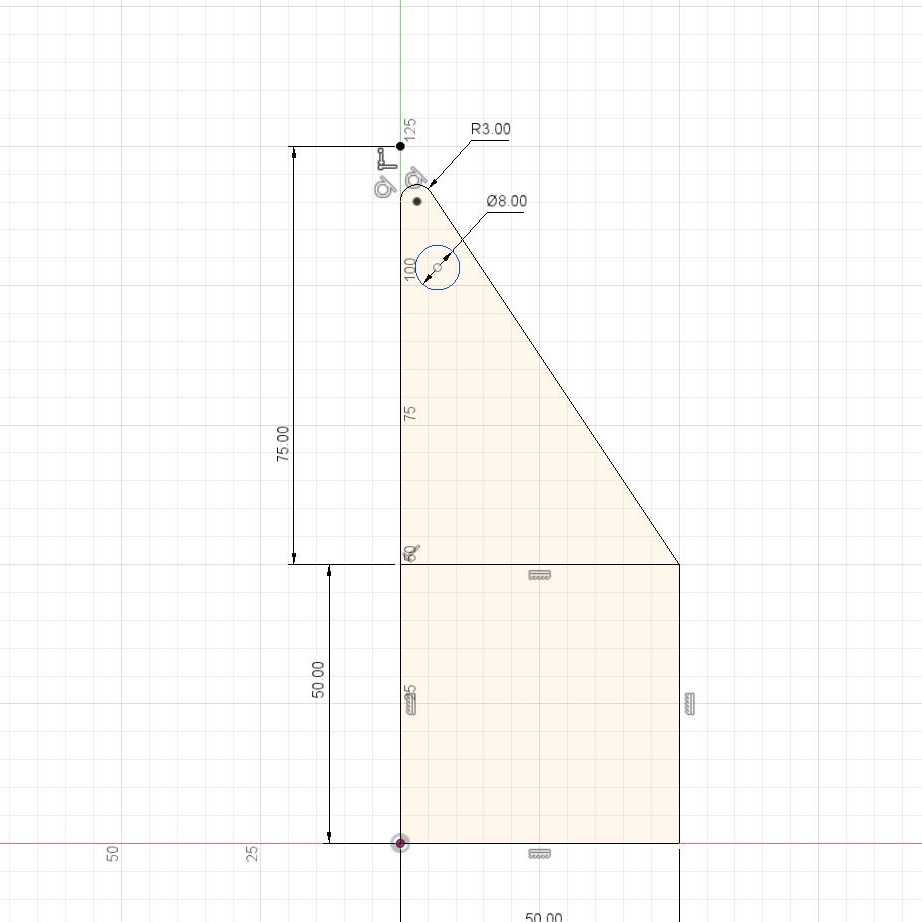
Moottorit on ruuvattu neliömäiseen alumiinilevyyn. Levyn pohjasta, yhdensuuntaisesti toisiinsa, kaksi kulmaa ruuvataan kiinni. Niiden välinen etäisyys on yhtä suuri kuin profiilin leveys. Lisäksi levy moottorin kanssa on kiinnitetty profiiliin, kiinnitysreiät porattu ja kaikki kierretty pulteilla.





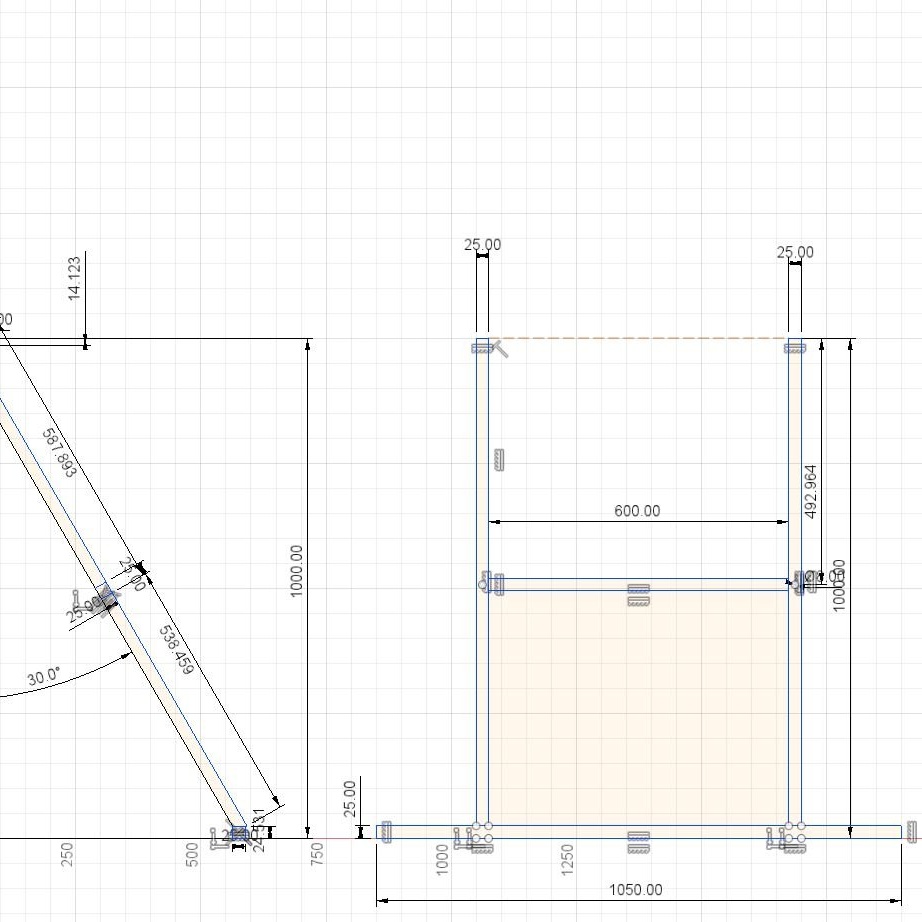
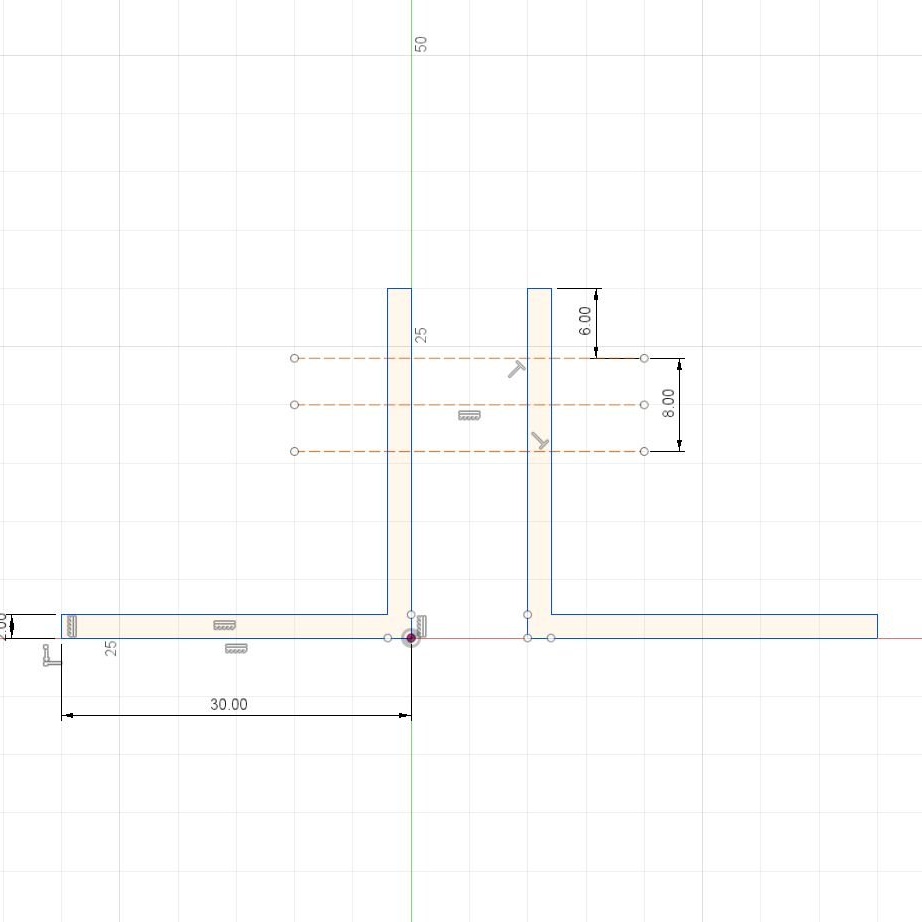
Vaihe kuusi: Alusta
Alusta oli valmistettu alumiiniprofiileista 25 x 25 mm ja paksuus 3 mm. Kaikki osat hitsattiin ja niiden koot näkyvät kuvassa. Ajatuksena oli kiinnittää runko korista 30 asteen kulmaan. Runkovaurioiden välttämiseksi vedetään tukikaapelit niiden väliin.


Vaihe seitsemän: Tukiprofiilien tukeminen
Moottorien asentamisen jälkeen tukiprofiilit alkoivat taipua. Sitten päällikkö yritti käynnistää moottorin ja huomasi, että profiilit "kävelevät". Suunnittelua oli tarpeen vahvistaa.
Levyjen lisääminen lisäisi liikaa painoa rakenteeseen. Sitten mestari päätti tehdä V-muotoisen mallin korista alaspäin. Köydet on kiinnitetty alaosaan. Kaapelien muut päät on kiinnitetty kiinnittimiin tukiprofiilien keskellä. Kaapelit vedetään nostimella. Siten rakenne jäykkää.















Kahdeksas vaihe: Yhdistä
Ensiksi isäntä juottaa liittimet johtimien päihin.


Aloittaa sitten asennuksen. Jokaisen moottorin pyörimissuunta oli tarkistettava. Tarvittaessa on helppo muuttaa moottorin ja vastaavasti ruuvin pyörimissuuntaa vaihtamalla kaksi ESC: stä tulevasta kolmesta johdosta moottoriin. Kun kaikki moottorit oli kytketty oikein, velho suoritti asennuksen valmistajan kytkentäkaavion mukaisesti.
Lennonohjaimet IMU DJI A3 ovat erittäin herkkiä metallien aiheuttamille häiriöille, ja isäntä ei pystynyt konfiguroimaan järjestelmää häiriöiden takia. Seurauksena isäntä korvasi A3: n Naza M V2: lla, jolla oli samanlainen kytkentäkaavio. Naza M V2 toimi erittäin luotettavasti.
Sitten ohjattu toiminto yhdistää akut. Jokaisessa kantoprofiilissa kaksi 22,2 V: n paristoa on kytketty sarjaan.



Vaihe yhdeksän: Pilot-istuin
Istuin ommeltiin kestävästä kankaasta. Myös lentäjälle, joka kiinnitetään kehykseen, kiinnitetään turvavyö ja kypärä.






Vaihe 10: Ensimmäinen lento
Ennen lentäjän lentoa okkopterillä tehtiin useita testejä hiekkasäkeellä ja sitten henkilön mallissa. Lennon aikana simuloitiin erilaisia tilanteita hallinnan menettämisestä tuulenpuoleen.
Kaikkien testien jälkeen lentäjä lopulta lensi ilmaan.






Ennen lentää, sinun on suoritettava seuraavat toimenpiteet.
Tarkista pulttien, kaapeleiden ja moottorin kiinnitys.
Tarkista johdotus.
Tarkista, että ruuvit pyörivät helposti.
Varmista, että kaikki ESC: t on kytketty pois päältä.
Varmista, että kaikki akut ovat kunnolla kiinni ja ladatut.
Kytke virta ohjaimeen alustamista ja kalibrointia varten.
Kun olet muodostanut yhteyden GPS: ään, se siirtyy täysin automaattitilaan (Alt. + Att. Hold).
Istu lentäjän istuimella ja solja ylös.
Kytke kaikki akut ESC: hen.
Kytke kaksi paristoa sarjaan (ESC-RB-RB-ESC) vastuksella kipinän poistamiseksi.
Kytke moottorit päälle kääntämällä kytkin päälle-asentoon.
Ohjaa oktokopteria säätimellä.