


Hei taas. Ei niin kauan sitten lasin ohjeet laserkaiverin luomiseksi CD- tai DVD-rom-levyltä. Ensimmäinen versio laser kaivertajasta toimi täysin, mutta ei ilman monia ongelmia. Ensinnäkin käytin L9110S-moottoriohjainta, menettäen siten kyvyn käyttää moottorin mikrotason, ja seurauksena kaiverruksen resoluutio oli rajoitettu. Kaiutinohjelmiston yhteensopimattomuus vakiokaiverrusohjelmien kanssa oli myös ongelma. Toisessa versiossa poistin kaikki puutteet, ja kaivertaja alkoi täyttää standardit ja noudattaa myös G-koodeja. Perusta on pysynyt samana, sähkö ja ohjelmistot ovat muuttuneet. Esitän sinulle ohjeet edellisen asentamiseen tai uuden laserkaiverin luomiseen.
Tarvitsemme:
- DVD-ROM tai CD-ROM
- 10 mm paksu vaneri (6 mm voidaan myös käyttää)
- Puuruuvit 2,5 x 25 mm, 2,5 x 10 mm
- Työläs Uno (yhteensopivia levyjä voidaan käyttää)
- Arduino CNC Shield v3
- Laser 1000mW 405nm Blueviolet
- A4988 askelmoottoriohjaimet pattereilla 2 kpl
- 5 V: n virtalähde (käytän vanhaa, mutta toimivaa tietokonevirtalähdettä)
- Transistori TIP120 tai TIP122
- Vastus 2,2 kOhm, 0,25 W
- kytkentäjohdot
- Liitin 2,54 mm Dupont
- Eletrolobzik
- pora
- Puun porat 2 mm, 3 mm, 4 mm
- Ruuvi 4 mm x 20 mm
- Mutterit ja aluslaatat 4 mm
- juotosrauta
- Juote, hartsi
Vaihe 1 Kokoamme kotelon, mekaniikan ja valmistelemme virtalähteen.
Tässä teemme kaiken tarkalleen kuten ohjeen ensimmäisessä, toisessa ja kolmannessa vaiheessa "Laserkaiverin vanhasta DVD-Rom-levystä".
Neljäs vaihe voidaan jättää pois, koska me ei tarvitse ohjainta. Lähetämme kaikki komennot terminaalin kautta.
Vaihe 2 Moottorien valmistelu.
Ensimmäisessä artikkelissa luetellut askelmoottorien ja vaunujen poistaminen Joten, koska siellä juotamme johdot moottoriin. Dupon-liittimet on niitettävä johtojen toisessa päässä:
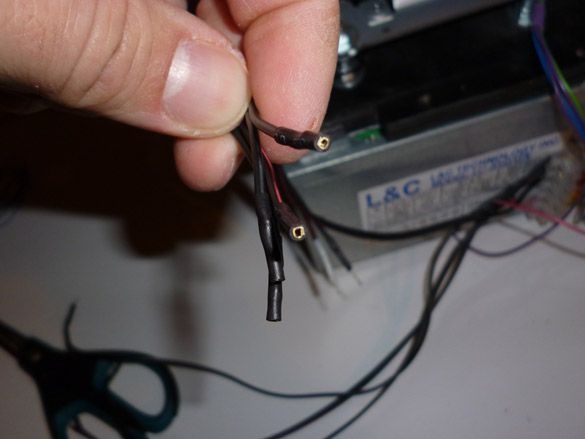
Jos on, on kätevää käyttää muovikoteloa heille neljään johtimeen. Jos ei, voit, kuten minä, laittaa kutiste kutakin johtoa varten.
Vaihe 3 Keräämme sähköasentajan.
Kaivertajan aivot on Arduino Uno.

Asenna se kaivertajan takaosaan:

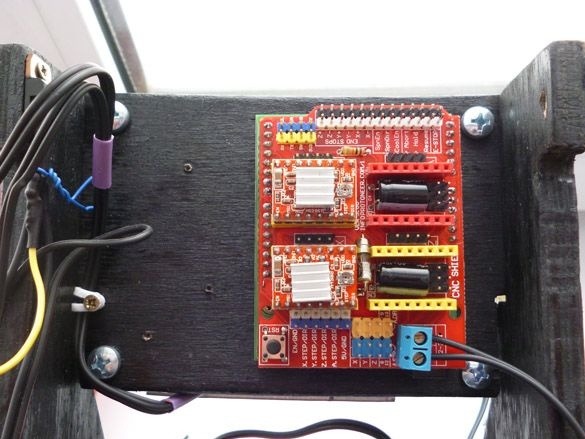
Yksi tärkeimmistä osista on Arduino CNC -suoja.Käytämme tämän laajennuskortin kolmatta versiota. Hänen ansiosta vähennamme huomattavasti johtimien määrää ja yksinkertaistamme kaivertajan kokoamista:
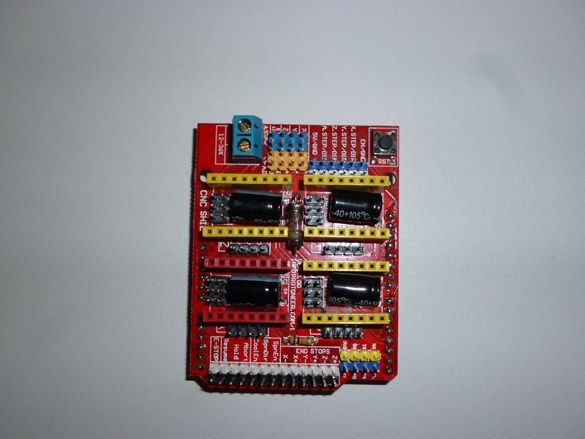
Ja kääntöpuolella:

Laitimme Arduino CNC Shied v3: n Unon päälle:

Neulepuserot tulee toimittaa laajennuslevyn mukana. Ennen ohjaimen asentamista on asennettava hyppyjohtimet X- ja Y-akseleille, toisin sanoen hyppyjohtimet MS0, MS1 ja MS2 on asennettava X- ja Y-akseleille. Jos hämmennät pieniä ohjeita tästä laajennuskortista:
Näytä online-tiedosto:
Vetolaitteet näyttävät tältä:
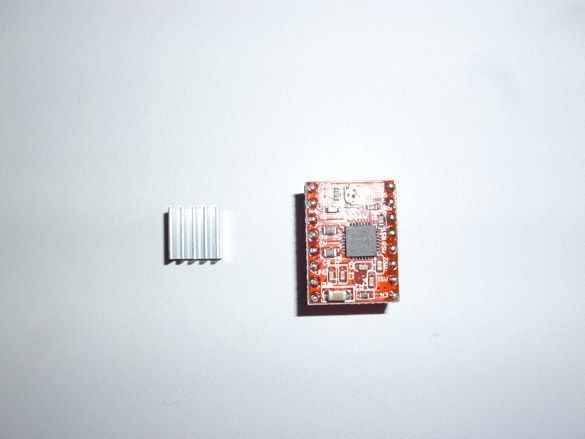
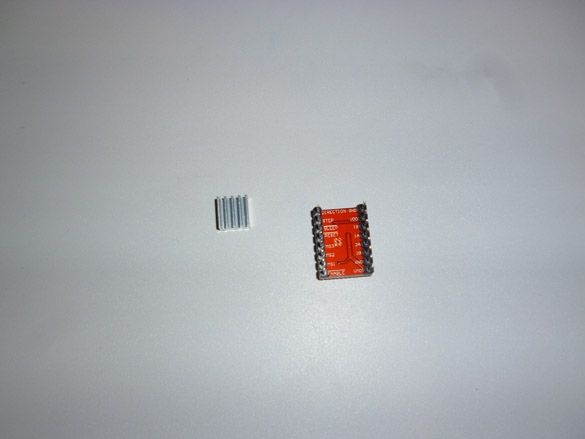
Asenna ensin lämpöpatterit ohjaimeen:
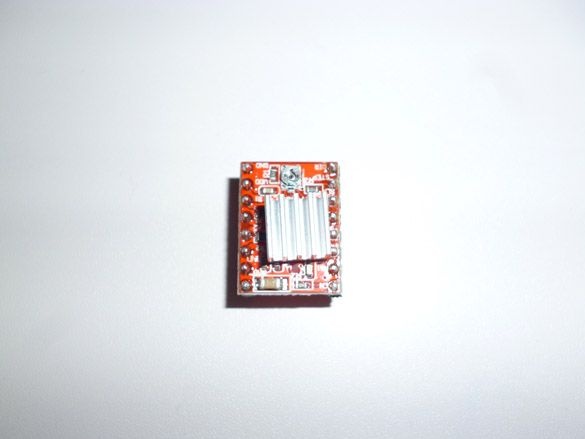
Ja sitten laitamme ne paikoilleen X- ja Y-akseleille. Huomioi kuljettajan sijainti. Koska se voidaan helposti asentaa, ei ole totta. Kuljettajan EN-näppäimen on vastattava samaa laajennuskortin pistoketta:
Suosittelen ostamaan välittömästi sarjan, joka koostuu Arduino Unosta, CNC Shieldistä ja A4988-ohjaimista, joissa on patterit. Tämä on halvempaa, ja sinun ei tarvitse odottaa seuraavan komponentin ilmestymiseen.
Kuljettajan ja jäähdyttimen kanssa ostimme valmiin laserin, joka kuluttaa jopa 500 mA. Sitä ei voida kytkeä suoraan Arduinoon. Voit ratkaista tämän ongelman ottamalla TIP120- tai TIP122-transistori. 2,2 kOm-vastus sisältyy transistorin kannan ja Arduinon nastan 11 väliseen rakoon. CNC-suojassa tämä tappi on merkitty Z +. Tämä ei ole kirjoitusvirhe. Tässä on asia. Tulevaisuuteen sanon, että teemme yhteistyötä GBRL 1.1 -laiteohjelmiston kanssa. CNC Shield v3 on tehty tämän laiteohjelmiston aikaisemmalle versiolle. Versiossa GBRL 1.1 kehittäjät päättivät tehdä porttien numeroinnin uudelleen, ja siksi se eroaa taululle kirjoitetusta. Ne nimittäin vaihtoivat Z + (D12) ja Spn_EN (D11). Kara on kytketty D11: ään, joka on PWM-portti, moottorin nopeuden tai tässä tapauksessa laservoiman ohjaamiseksi. Kuva muokattuilla nastoilla:
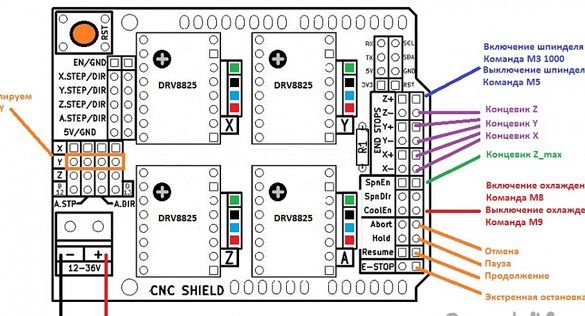
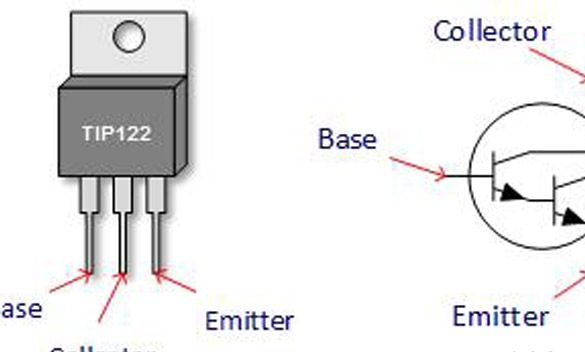
Pohja - R 2,2 kOm - nasta 11 Arduino (Z + CNC Sheild)
Keräilijä - GND Laser (musta lanka)
Emitter - GND (yleinen virtalähde)
+5 laser (punainen johdin) - +5 virtalähde
Piiri ei ole monimutkainen, joten juotamme kaiken painon, eristämme transistorin johdot ja jalat, lähettämällä sen taakse, puolelle

GBRL-laiteohjelmiston asentaminen ei ole helppoa, etenkin aloittelijalle. Ja laserilla, kuten tulitikkuilla, lapset eivät ole leluja. Silmä voi vaurioitua vakavasti jopa heijastetulla säteellä. Siksi suosittelen työskentelemistä laserilla vain suojalasien kanssa, ja kytke testien ja asetusten ajaksi tavallinen LED laserin sijasta. Värillä ei ole väliä. Kun olemme sisällyttäneet sopivan vastuksen diodin positiivisen johtimen rakoon, liitämme LEDin laserin sijaan:

Suojalasit ja testidiodi minimoivat kaiverruksen mahdolliset ongelmat.

Vaihe 4 Moottorin virtarajan asettaminen.
Virran voimakkuuden asettaminen on välttämätöntä, jotta melua voidaan vähentää toimiessaan suurilla virroilla, päästä eroon leikkauksesta pienillä virroilla ja myös askelmoottorin lämmityksen vähentämiseksi.
Yhdistämme yleismittarin negatiivisen johtimen GND-koskettimeen ja paina positiivinen johdin ohjaimen viritysvastuksen runkoon. Kierrä viritysvastus pienellä ruuvitaltalla mittaamalla jännite Vref. Siksi asetamme oikean virran askelmoottoriohjaimellemme.
A4988: n Vref-kaava riippuu niihin asennettujen vastusten arvosta. Tämä on yleensä R100.
Vref = Imax * 8 * (RS)
Imax - askelmoottorin virta
RS on vastuksen vastus.
Meidän tapauksessamme:
RS = 0,100.
Askelmoottorien suositeltava virran voimakkuus on 0,36A. Pidän parempana lisätä sitä hiukan.
Imax = 0,4
Vref = 0,5 * 8 * 0,100 = 0,32 V.
Vaihe 5 Täytä GBRL 1.1.
Kätevin on kirjoittaa valmis HEX-ohjelmistotiedosto Arduino Unolle.
Tätä varten tarvitset XLoader-ohjelman:
Suorita ohjelma. Valitse aiemmin ladattu HEX-tiedosto. Alla valitsemme ohjaimemme luettelosta, nimittäin Uno (ATmega328). Valitse seuraavaksi se portti, johon Arduino on kytketty. Asetamme nopeudeksi 115200 ja napsauta Lataa. Kun olet odottanut täytön valmistumista, voit jatkaa vahvistusta ja kokoonpanoa.
Vaihe 6 Asetukset.
Laiteohjelmistoon sisältyvät parametrit eroavat koneemme parametreista. Pääteikkunaa käytetään konfigurointiin. Voit käyttää mitä haluat. Pidän parempana Arduino IDE: tä. Lataa se projektin virallisilta sivuilta:
https://www.arduino.cc/en/Main/Software
Kirjastoja ei tarvita, tarvitsemme vain päätelaitteen Arduino IDE: ltä. Valitse Työkalut-välilehdestä meidän kortti - Arduino Uno ja valitse sitten portti, johon se on kytketty. Käynnistä sen jälkeen työkalu - Portin valvonta -välilehdellä oleva pääte. Aseta pääteikkunassa parametri CR (kelkan paluu) ja nopeus 115200 baudia. Seuraavan rivin pitäisi tulla:
Grbl 1.1f ['$' avuksi] Jos näit hänet, laiteohjelmistosta on tullut onnistunut ja voit jatkaa asennusta. Joten käytämme askelmoottoreita DVD- tai CD-asemilta. Niitä kutsutaan nimellä PL15S020 tai yhteensopivia tämän kanssa:
Näytä online-tiedosto:
Näet nykyiset laiteohjelma-asetukset kirjoittamalla:
$$Tällä moottorilla on 20 askelta kierrosta kohti. Ruuvipiike on etäisyys, jolla vaunu kulkee yhdessä kierrossa, tässä tapauksessa 3 mm. Laskemme portaiden lukumäärän 1 mm: llä: 20/3 = 6,66666666666667 askelmaa / 1 mm. Asensimme microstep 16. ajureihin 4988. Joten, 6.666666666666767 * 16 = 106,67 askelta / 1 mm. Me kirjoitamme nämä tiedot laiteohjelmistoon. Kirjoita tämä terminaali-ikkunaan:
$100=106,67
$101=106,67
$102=106,67Viimeinen parametri on valinnainen, se on tarkoitettu Z-akselille, mutta parametreja on ymmärrettävämpi sitten. Käynnistä sitten lasermoodi komennolla:
$32=1Aseta laserin enimmäistehoksi 255:
$30=255Testaa laser (on parempi kytkeä ensin LED) kirjoittamalla komento:
M3 S255Sammuta laser komennolla:
M5Sitten asetimme suurimman palamiskokon. Kaivurillemme tämä on 38 x 38 mm:
$130=38.000
$131=38.000
$132=38.000Viimeksi mainittu parametri on jälleen valinnainen, se on Z-akselille.
Hajotin kaivettimen työparametrit siten, että voit verrata:
$0=10
$1=25
$2=0
$3=0
$4=0
$5=0
$6=0
$10=1
$11=0.010
$12=0.002
$13=0
$20=0
$21=0
$22=0
$23=0
$24=25.000
$25=500.000
$26=250
$27=1.000
$30=255
$31=0
$32=1
$100=106.667
$101=106.667
$102=106.667
$110=500.000
$111=500.000
$112=500.000
$120=10.000
$121=10.000
$122=10.000
$130=38.000
$131=38.000
$132=38.000Vaihe 7 Valmista kuva.
Jos haluat polttaa jotain, jota tarvitset valitun kuvan valmistamiseksi, nimittäin, käännä se G-koodiksi. Tätä varten käytämme CHPU-ohjelmaa:
Lataa ja repi ohjelma. Napsauta "Tuo kuva" ja valitse kuva. Aseta ”Muuta tarkkuutta” -osiossa ”Leveys” ja “Korkeus” enintään 38 mm. ”Tiheyttä” voidaan kokeilla eri tavalla, mielestäni optimi on 6:
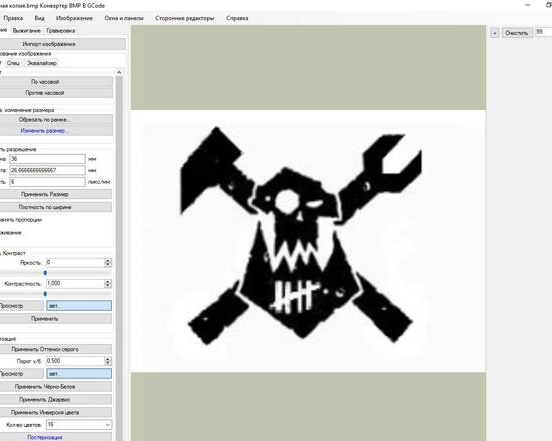
Siirry "Polta" -välilehteen. Valitse "PÄÄLLE mustalla". Kohdassa "Alustavat komennot" olisi oltava seuraavat merkinnät ilman suluissa selityksiä:
%
G71
S255 (laservoima maksimi)
G0 F200 (joutokäynti)
G1 F100 (palamisnopeus)
(F-palamisnopeus)Voit kokeilla erilaisia palamisnopeuksia. Muoville F100 riittää, puulle voi tarvita vähemmän. Napsauta "Tallenna G-koodi" ja määritä tallennuspaikka. Tärkeää! Tarkkuuden tulisi olla ".nc".
Vaihe 8 Palaminen.
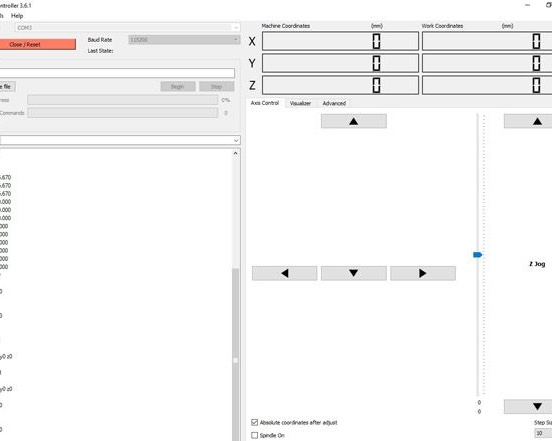
Käytä GrblController -ohjelmaa polttaaksesi ja hallitaksesi kaivertajaa:
Lataa ja asenna se. Napsauta "Avaa". Kun olet tarkistanut, että kaikki toimii, nuolien ja laserin käynnistyskomennon avulla, valitse tallentamasi tiedosto ja lähetä se poltettavaksi painamalla “Aloita”:
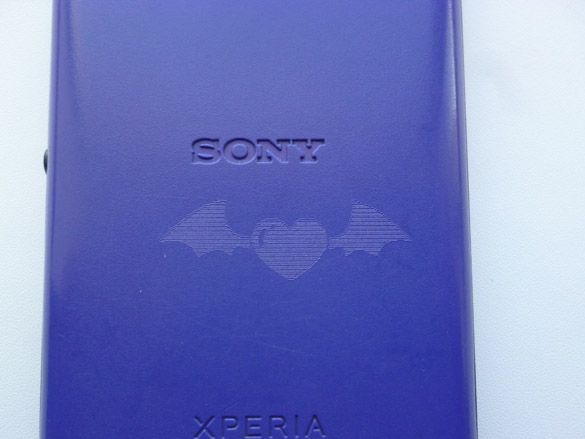
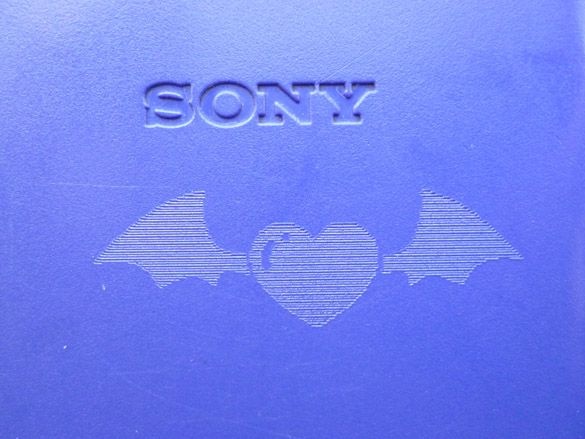
Video kaivertaja:
